有人/無人協同指控終端界面設計
2019-06-20 10:31:23李怡偉涂天佳
電子技術與軟件工程 2019年5期
李怡偉 涂天佳


摘要??? 有人/無人協同指控終端是未來有人/無人協同作戰的重要裝備,簡潔高效的協同指控界面設計有助于操作員增快信息辨識度、減小誤讀率,顯著提高作戰效能。本文借鑒國外有人/無人協同研究成果,梳理了有人/無人協同指控終端架構,結合無人機控制站設計風格和人機功效設計要求,設計了一款簡潔直觀的有人/無人協同指控界面,可協助操作員高效地完成協同作戰任務。
【關鍵詞】有人/無人協同 協同指控 架構界面
1 引言
無人機因其價格低廉、結構相對簡單、生存能力強且無需承擔人員傷亡的風險等優點,在近幾場局部戰爭中被廣泛應用,其戰場優勢在現代戰爭中日趨突出。但由于無人機智能化水平的限制,其還無法獨立自主執行復雜的作戰任務。通過有人/無人協同作戰、平臺互操作和共享平臺資源,可以使有人/無人平臺優勢互補,有效提高作戰效能。美國國防部《2011-2036無人系統綜合路線圖》中指出“美國軍事中心從中東轉移至亞太地區以后,有人/無人編隊將成為一種基本作戰模式”,進一步強化了有人/無人編隊的作戰意義。
鑒于有人/無人協同作戰的應用前景,美、英等國從20世紀末就開始競相開展此方面研究,探索有人/無人編隊作戰概念、關鍵技術,并通過試驗試飛驗證有人空中平臺協同控制無人機的可行性和實用性。目前,美國陸軍已完成多個有人/無人協同演示驗證項目,研制了不同協同控制級別的機載協同指控終端,并完成了實際列裝。
相比較,國內對有人/無人協同作戰的研究尚處于探索階段,有人/無人協同指控系統設計尚不成熟。而且協同指控終端要部署在有人機上,有人機相比地面控制站,空間小、人員緊張,因此對協同指控終端的重量、體積、資源有更嚴格的要求,設計難度更大、技術要求更高。本文在總結國外有人/無人協同項目經驗的基礎上,梳理了有人/無人協同指控終端架構,并結合無人機控制站界面設計風格和人機功效設計要求,設計了一款以“左參數、右任務”為主要風格的有人/無人協同指控界面。
2 國外有人/無人協同概況
有人/無人協同作戰源于有人無人組合(MUM-T)思想,該思想出現于20世紀60年代,指有人和無人系統之間為實現共同目標而建立聯系,用于描述平臺互用性和共享資產控制以獲得共同的作戰任務目標。美國防部《2013~2038無人系統綜合路線圖》也定義,有人/無人編隊(Manned-Unmanned System Teaming)是指有人與無人系統為執行相同任務而建立的整體編隊,通過平臺互操作和資源共享控制,以達成共同的任務目標。
在此目標的驅動下,20世紀90年代起,美、英等國相繼開始發起了多項有人/無人協同研究計劃,其具體情況見表1。
分析國外有人/無人協同項目研究可以發現,有人/無人協同研究內容主要包含概念探索、有效性分析、技術梳理、系統設計及技術攻關、實驗室仿真、飛行演示驗證和實裝化。其中有/無人協同裝備的研發、成熟對推動有人/無人協同技術從仿真到試飛和實裝起到關鍵性作用,如MCA、WA輔助決策助手和VUIT-2、UTA協同數據鏈。隨著有人/無人協同技術的發展,其要求的協同控制能力在不斷提升,協同控制實現方式逐漸向異構、多平臺互操作發展,對無人機的自主能力要求不斷提高。國內在有人/無人協同研究上還有較大差距,應在概念探索、技術研究的同時,大力發展協同裝備,加強對有人/無人協同指控終端的研究和設計,探索簡潔高效的協同指控終端界面設計思路。
3 協同指控終端設計
3.1 協同指控終端架構
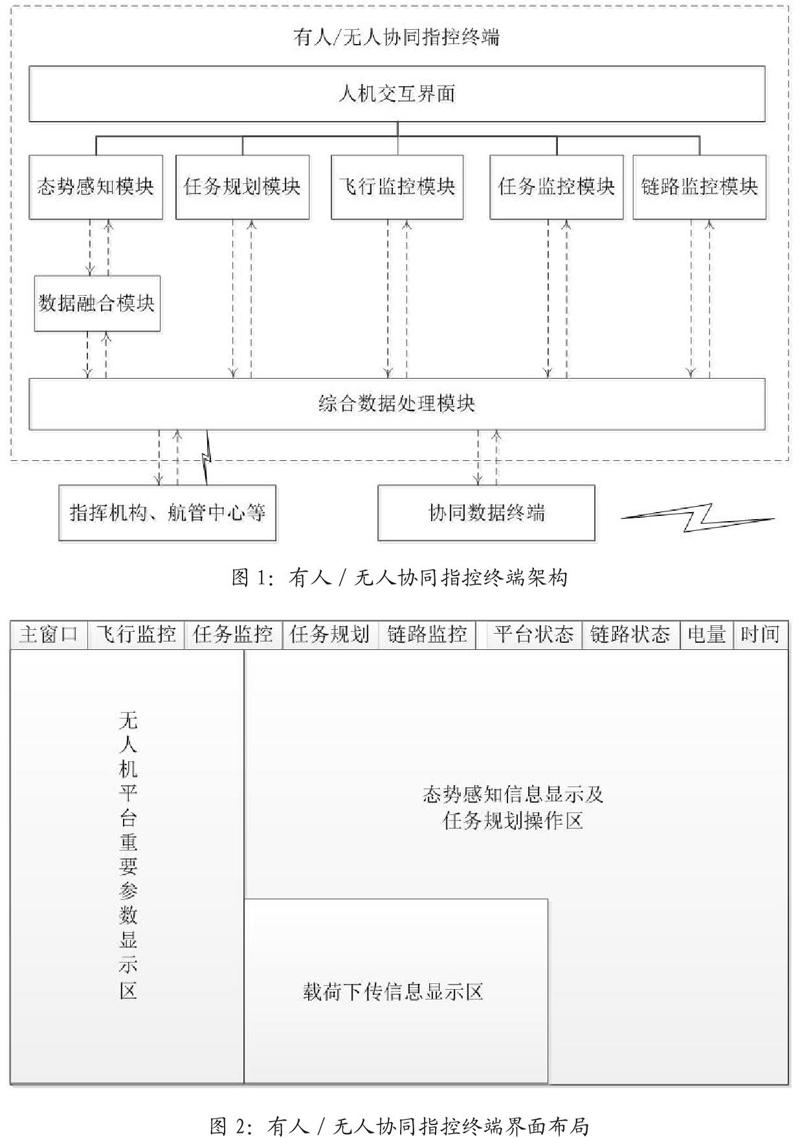
有人/無人協同指控終端相當于安裝在有人機上的無人機控制站,其主要功能有兩方面:一是通過協同數據鏈接收無人機狀態、載荷、鏈路信息,并接收有人機、作戰指揮中心、航管中心等發送的信息,通過綜合數據處理和數據融合,將上述信息在界面上綜合顯示;另一方面是根據當前態勢和作戰任務實時地對無人機及其載荷進行任務規劃和操作控制。根據有人/無人協同作戰要求和交互過程,可知有人/無人協同指控終端架構如圖1。
其組成模塊和功能如下:
(1)人機交互界面:綜合顯示無人機狀態、載荷、鏈路、態勢等信息,并提供語音、鍵盤、操縱桿等輸入方式,實現高效的人機交互控制;
(2)態勢感知模塊:通過數據融合模塊,將作戰指揮中心下發信息以及各載荷偵察信息等清晰地展現在地圖上,以指導任務規劃;
(3)任務規劃模塊:根據態勢信息和作戰任務,對無人機航路、載荷和鏈路進行規劃,以便安全高效地完成作戰任務;
(4)飛行監控模塊:對無人機飛行姿態、高度、位置等信息進行綜合顯示和控制;
(5)任務監控模塊:對光電、雷達等載荷信息進行顯示和控制;
(6)鏈路監控模塊:對鏈路狀態、信道、帶寬等信息進行顯示和控制;
(7)數據融合模塊:對作戰指揮中心下發信息以及各載荷偵察信息進行匹配融合,作為態勢感知模塊的輸入,減輕操作員負擔;
(8)數據綜合處理模塊:數據的組幀、解析和分發等
3.2 協同指控終端界面設計
由于協同指控終端部署在有人機上,機上空間小、人員緊張,因此對其界面設計、重量、體積、資源有更嚴格的要求。一般無人機地面控制站多分為飛行監控臺和任務監控臺,由不同人員操控,但協同指控終端通常需要由一人完成飛行監控和任務監控操作,因此其設計難度更大、技術要求更高。為在一個顯示界面上同時實現飛行和任務監控操作,需要設計高效的數據融合算法和人機交互界面,以及精簡的指令集和智能化的輔助決策策略,同時提高無人機的自主水平。
由協同指控終端功能和架構可知,協同指控終端需要監控的信息涵蓋飛行、任務、鏈路、態勢等多方面,但顯示器尺寸大小有限,單頁面無法顯示上述所有信息,因此軟件需包含一個主界面和多個功能子頁面,主界面顯示無人機平臺部分重要信息、鏈路狀態、態勢信息以及載荷下傳信息等,并實現任務規劃操作;功能子頁面分別對應顯示協同指控終端架構中飛行監控、任務監控、任務規劃和鏈路監控模塊信息,并實現相應控制操作。考慮到態勢感知信息與任務規劃的相關性,將態勢感知模塊信息顯示在任務規劃子功能頁,為任務規劃提供參考和約束。
由于人們在使用計算機時,對屏幕的視覺注意并不均勻,通常對左上角比較敏感,占40%,右下角最不敏感,占15%,不及對左上角關注的一半,且人們的閱讀順序通常是從上先下、從左到右,因此按照信息重要程度降序排列,其布局位置為左上-右上-左下-右下。同時綜合考慮飛行員和操作員“左參數、右任務”的視覺習慣,以及標簽欄、工具欄在界面上方的使用習慣,為使其對信息辨識度增快、誤讀率減小、可靠性提高,并緩解其心理和生理疲勞,得到協同指控終端界面總體布局如圖2。
鑒于圖表、顏色等形式比文字更形象直觀,且不易造成視覺疲勞,本文以有人/無人協同指控終端界面布局為基礎,融入圖表和顏色設計,設計了圖3協同指控界面,界面以“左參數、右任務”為主要風格,整體簡潔直觀。
主窗口界面組成及功能如下:
(1)標簽和狀態綜合顯示欄。位于主界面上部,呈橫向長條狀。可在主窗口和飛行監控、任務監控、任務規劃和鏈路監控等其他功能窗口之間進行切換(各功能窗口與協同指控終端架構人機交互界面所含內容相對應),查看詳細的無人機狀態、任務載荷、鏈路設置、態勢等信息,并實現更細致的飛行、載荷控制,完成任務規劃功能;
(2)無人機狀態顯示區。位于主界面左部。用于顯示飛行姿態、速度、油量、轉速、滑油溫度和流量、以及告警等關鍵信息;
(3)態勢及任務規劃區。位于主界面右部。用于顯示有人/無人載荷信息融合后的態勢信息,并可在地圖上實現任務規劃,形象直觀。可與載荷信息顯示區對調顯示;
(4)載荷信息顯示區。疊加在態勢及任務規劃區上,位于其左下角,可切換顯示各個載荷偵查信息。可與態勢及任務規劃區對調顯示。
文章在界面設計過程中,將協同指控終端按照功能進行模塊化劃分,可根據實際需求集成不同的功能模塊,通用化強,并且充分考慮了飛行員的視覺習慣,界面布局以“左參數、右任務”為主要風格,同時融入圖表和顏色設計,簡潔直觀,可增快操作員對信息的辨識度、減小誤讀率、提高可靠性,并緩解其心理和生理疲勞。
4 結論
本文在概述國外有人/無人協同研究的基礎上,梳理了有人/無人協同指控終端的架構,將其功能模塊細化,并闡明了各模塊之間的交互關系,最后結合無人機控制站設計風格和人機功效設計要求,對有人/無人協同指控界面進行了設計。界面按照功能模塊進行集成,通用化強,并且以“左參數、右任務”為主要風格,多采用圖表、顏色等元素,不易造成視覺疲勞,簡潔直觀,可為有人/無人協同指控軟件界面設計實現提供借鑒。
參考文獻
[1]The Department of Defense of USA. Unmanned Systems Integrated Roadmap FY2011-2036[R]. Washington DC:DoD,2012.
[2]Veth M, Busque J, Heesch D, et al. Affordable Moving Surface Target Engagement[C]. Proceedings of 2002 IEEE Aerospace Conference. Montana, USA: IEEE, 2002: 2545-2551.
[3]Butler A. U. S. Army Testing More MUM-T Technology[J]. Aviation Week & Space Technology, 2014,10.
[4]Balinda M, Mark E, Robert Y, et al. Hunter Standoff Killer Team(HSKT) Ground And Flight Test Results[J]. Proceedings of SPIE, 2007,6578:1-14.
[5]Kurnaz S, Cetin O. Autonomous Navigation and Landing Tasks for Fixed Wing Small Unmanned Aerial Vehicles[J]. Acta Polytechnica Hungarica,2010,7(1):1-10.
[6]Johnson D. Manned/Unmanned Common Architecture Program (Mcap) Net Centric Flight Tests[J]. Proceedings of SPIE, 2009,7345:1-10.
[7]王子熙.美軍有人直升機與無人機的協同作戰[J].飛航導彈,2014,7:pp61-66.
[8]Department of Defense.Unmanned system integrated roadmap FY2013- 2038[R].Washington DC: Department of Defense,2014.
[9]Charles S. Rapid proto-duction of the Apache video from UAS for interoperability teaming-level2 (VUIT-2)[EB/OL].[2017-09-25]. https://www.dsiac.org/sites/default/ files/journals/2008-Fall.pdf.
[10]Breece R, Meely M. Testing the MUM teaming system from the Apache Block III attack helicopter:an armed manned-unmanned team[R]. Alabama: The Aviation Flight Test Directorate, 2010.
[11]韓志鋼.美軍有人直升機與無人機協同技術發展及啟示[J].電訊技術,2018,1:pp113-118.
[12]AWACS/UAV協同目標識別技術研究[J].艦船電子對抗,2016,39(05)pp9-13.
[13]李樂山.人機界面設計[M].北京:科學出版社,2004,50.
[14]莊達民,完顏笑如.飛行員注意力分配理論與應用[M].北京:科學出版社,2013.[15]孫濱生.現代戰斗機座艙布局[M].北京:??? 航空工業出版社,1989.
