一種在NLOS環境下應用于NB?IoT系統的組合定位算法
2019-06-19 02:33:41崔理偉林基明符杰林劉錦玲
現代電子技術 2019年11期
崔理偉 林基明 符杰林 劉錦玲

摘 ?要: 傳統非視距(NLOS)誤差下無線定位的TDOA算法通常是減弱NLOS誤差影響或直接提取LOS測量值,對于窄帶物聯網(NB?IoT)需要解決LOS與NLOS傳輸并存下的定位精度問題。文中采用最小二乘法對NLOS和LOS傳播進行鑒別,然后對NLOS下的TDOA值進行優化處理。在此前提下,提出一種組合定位的算法,采用Taylor級數展開法計算LOS傳輸情況,用CHAN算法計算NLOS傳輸情況,再通過組合定位得到定位結果。仿真結果表明,改進后算法在NLOS的信道環境下的定位性能明顯提高。
關鍵詞: OTDOA; TDOA誤差鑒別; NLOS誤差優化; Taylor級數展開法; CHAN算法; 組合定位
中圖分類號: TN921?34 ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2019)11?0001?06
Abstract: The traditional wireless location TDOA (time difference of arrive) algorithm with non?line?of?sight (NLOS) error is usually used to weaken the influence of NLOS error or directly extract the LOS measurement values. For NB?IoT, the positioning accuracy at the coexistence of LOS and NLOS transmission needs to be improved. Therefore, the least square method is used to identify the propagation of NLOS and LOS, and then optimize the TDOA values at NLOS. Under this premise, a combination positioning algorithm is proposed, whose basic thoughts are to use the Taylor series expansion method to calculate the LOS transmission delay, adopt the CHAN algorithm to calculate the NLOS transmission delay, and obtain the positioning result by means of combination positioning. The simulation results show that the proposed algorithm after perfection can improve the localization performance in NLOS channel environment obviously.
Keywords: OTDOA; TDOA error identification; NLOS error optimization; Taylor series expansion method; CHAN algorithm; combination location
0 ?引 ?言
隨著移動物聯網的發展與應用,“萬物互聯”將成為未來物聯網的必然趨勢,特別是低功耗廣域網絡(Low Power Wide Area Network,LPWAN)是專為低帶寬、低功耗、遠距離、大量連接的物聯網應用而設計,必然成為未來5G部署的重要分支[1]。對于這種情況,華為、高通聯合提出NB?CIoT技術,而愛立信、中興、諾基亞等廠商聯合提出NB?LTE技術,最終經過激烈地競爭和討論,融合形成了NB?IoT技術。運營商和政府對LPWAN市場表現出極高的需求,物聯網應用中的重要部分預計將需要定位服務,大大拓寬了窄帶物聯網定位的應用空間。
由于全球導航衛星系統(GNSS)芯片的功率和成本過高等問題,使得GNSS芯片并不適用于巨量連接的大型物聯網。此外,NB?IoT設備很可能處于極端覆蓋環境的位置(例如室內,管道中或地下),這又需要終端設備針對NLOS誤差有良好性能的定位算法。為了能最大限度地保證NB?IoT發揮其本身高覆蓋、低功耗和低成本等優勢,3GPP工作組在RAN#72會議中批準了NB?IoT定位增強功能的工作項目,并同意引入支持UTDOA(Uplink Time Difference of Arrival)或OTDOA(Observed Time Difference of Arrival)的定位功能。因此,各大運營商和通信公司在RAN#86會議上就定位準確性、UE復雜度、UE功耗等進行了討論。
目前,已經有一些研究人員提出能應用于NB?IoT的TDOA算法,其中大部分是針對NLOS誤差進行優化。
在文獻[1]中提出一個在嘈雜環境中的無線傳感器網絡移動定位方法。這種方法的重要特點是不需要知道非視距誤差的參數,其關鍵技術是NLOS的識別和緩解。文獻[2?3]中類似地采用貝葉斯序列測試方法來識別信標節點的傳播情況,不過文獻[2]根據確定的測量條件,利用卡爾曼濾波器(MKF)調整測量噪聲協方差和預測協方差來減輕NLOS效應,文獻[3]通過減去NLOS誤差的平均值來校正包含NLOS誤差的NLOS測量,以減輕NLOS傳播的影響。文獻[4]通過聯合估計源位置和傳輸時間來實際制定RLS方程,RLS方程通過應用二階錐松弛(SOCR)技術,解決RLS問題中未知數相互耦合的問題,最終得到定位坐標。文獻[5?6]采用類似的誤差分布轉換法消除NLOS引起的超量時延影響,改善了非視距下的CHAN算法性能,最終解算得到定位坐標。文獻[7?8]提出一種基于殘差加權(RWGH)算法的降低非視距誤差的改進方法,這種方法的基本思想是逐漸消除非視距傳輸情況,然后在LOS傳播環境中進行定位。
然而,上述文獻所提出的方法均出于移動定位的考慮,將信道情況簡化為單一的NLOS或者LOS環境,然后進行優化和定位,不可避免地損失了一部分的信道數據,降低了實際信道下的定位精度。
本文基于NB?IoT的部署特點,在NLOS和LOS互相摻雜的實際信道下,對傳播情況進行鑒別,最大程度利用信號的全部TOA數據進行定位,從而提高在實際NLOS信道下的定位精度。
1 ?NB?IoT的定位模型
對于NB?IoT的TDOA方案,各大通信公司討論的結論是:在UE復雜度以及UE協議實現和內存要求上,UTDOA具有優勢;在網絡硬件要求和UE容量上OTDOA具有一定的優勢;而在定位精度、網絡同步等方面,兩者性能相似。在討論中支持OTDOA定位方案的公司認為,UTDOA需要使用窄帶物理隨機接入信道(NPRACH)來支持定位,由于NB?IoT的共享信道資源有限且干擾嚴重,系統的可擴展性受到上行信號序列和資源數量的限制,而OTDOA沒有此類容量的限制。此外,大規模部署的NB?IoT設備預計具有較長的生命周期,很可能超出現有網絡演進到5G環境,OTDOA的信號測量處理結構也能夠與5G定位具有協同作用,這樣有利于將來5G標準的移動邊緣計算(MEC)實現。而在將來,UTDOA定位方案很可能無法應對大規模的物聯網終端部署情況,所以NB?IoT系統發展OTDOA定位將是必然的趨勢。
在此簡要地介紹3GPP開發的OTDOA的初步架構和協議。更詳細的協議案例可以參考相關的3GPP技術規范來了解更多細節。在OTDOA中,UE測量從多個小區接收的定位參考信號(PRS)的到達時間(TOA),并從測量TOA中減去參考小區的TOA以形成參考信號時差(RSTD),測量到達時間差(TDOA)[9]。
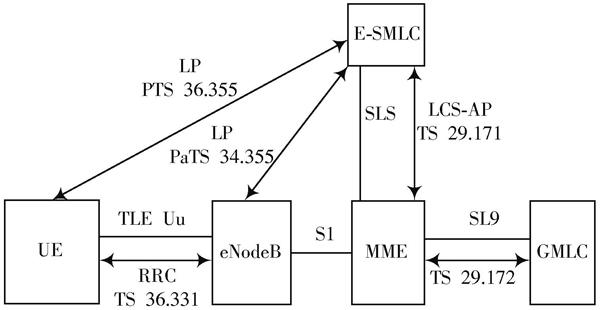
LTE中的定位由圖1所示的架構支持。架構下的典型定位信令流如下:首先,由移動性管理實體(MME)主動發起,或者MME接收到來自UE或網關移動定位中心(GMLC,GMLC是外部LBS客戶端與之通信的第一個節點)的位置服務請求;然后,MME向定位服務器(即演進服務移動定位中心(E?SMLC))發送定位請求。E?SMLC處理請求,與UE通信,并請求RSTD測量。在從UE接收到RSTD測量值時,E?SMLC估計出UE的位置并將結果發送回MME,而MME可以根據需要進一步將結果轉發給UE或GMLC。從這一部分可以看出,為盡量減少UE的負擔,在整個系統中由E?SMLC進行數據的處理和計算,這樣會在一定程度上降低實時定位的響應速度,但能使系統接受更復雜的算法,從而提高定位精度。
圖1 ?LTE定位結構圖
NB?IoT的定位服務基本采用蜂窩網的TDOA定位方式,TDOA定位是一種基于信號傳播時延的方法,而TDOA的基本思路是對信號傳播時延進行測量。由此假設時間點[T0]時有兩個信號分別從基站[i]和基站[j]發射出來。在接收端,MT在時間點[Ti]和[Tj]分別接收到來自于基站[i]和基站[j]的信號[10]。相應的傳播距離差計算公式為:
式中:[Ti,j]就是測量的TOA;[TNLOS]是電磁波的視距傳播時間;[τ]是測量偏差,這個偏差被認為是一個高斯隨機變量,平均值為零,標準差很小。[TNLOS]為非視距傳播引起的附加時延誤差,其只與電磁波的傳播環境有關。對NLOS引起的超量時延進行統計分析,[TNLOS]均值為[μNLOS],方差為[δ2NLOS]。但在不同的信道環境中,[TNLOS]的概率密度分布可能是指數、均勻、高斯或delta統計分布。
在實際的定位環境中,TOA的測量值誤差很難真正地服從零均值的高斯分布,通常只有MS與BS之間電波能夠LOS傳播,即要求無障礙物阻隔的情況下才能做到。但在大多數的蜂窩網小區中,受到多徑效應的影響,NLOS的傳播及多址干擾等因素造成的TDOA誤差才是定位誤差的主要來源。通常運營商在進行蜂窩網的基站選址時,為了確保用戶的信號穩定會布設大量的基站收發臺,以確保不會出現信號盲區。因此,對于NB?IoT這種經常應用于復雜環境的終端來說,接收到的TOA信號同時包含LOS和NLOS誤差。在這種情況下,使用傳統的只針對LOS或NLOS誤差的算法,必然會損失一部分精度。本文將LOS和NLOS下的測量數據進行鑒別分離后,再用組合定位法進行目標定位,以此運用所有數據來提高定位精度。
2 ?NLOS誤差鑒別和優化
實際的定位系統中,TOA的測量誤差主要來自測量設備及信號傳播環境影響,設參與定位的基站為[M]([M>]3)個,記為1,2,…,[M],所有這些[M]個距離測量都被分組,將有[N]個不同的距離測量組合:
距離測量的組合可以命名為[Skk=1,2,…,N],對NLOS誤差的鑒別過程描述如下:
1) 從全站選取[M]個基站,組合的個數為[M1=CMM=1]。采用最小二乘法計算移動臺坐標向量的中間值[Xk1],即可得到:
式中:[di]是基站和移動臺之間的測量距離;[Xi]是基站的坐標;[S1]是[M]個基站的組合;[Xk1]是通過使用[M]個基站的坐標估計的移動臺的坐標。進一步推導得到:[Res1Xk1,S1=Res1Xk1,S1M1=Res1Xk1,S1CMM ? ] (5)
2) 從全站選擇[M-1]個基站,例如選擇1,2,…,[M-1]個基站,組合的個數為[M2=CM-1M=M],重復以上步驟即可得到:
式中:[S2]是[M-1]個基站的組合;[Xk2]是通過使用[M-1]個基站的坐標估計的移動臺的坐標。
3) 比較Res1和Res2。如果Res1
4) 將[M]替換為[M-1],[M-2],…,4([M>3]),重復步驟1)~步驟3)以鑒別各基站的傳播路徑,直到當選擇不同的基站組合時Res1不改變,說明所選基站的傳播路徑是LOS傳播。
至此,完成了對整個基站的傳播路徑的鑒別。
在NLOS環境下附加時延通常可以認為由功率時延分布產生,在此類無線信道的仿真中,最常用的是由Ericsson的移動定位研究組提出的T1P1模型,也稱為COST259模型。在這個模型中通常可以認為服從指數分布,其概率密度函數為:
式中:[τrms]為由信道環境決定的均方根時延擴展,在都市類環境中[τrms]與平均超量時延類似,即[μ][∶][τrms]=1[∶]1,可以認為[τrms]是服從對數正態分布的隨機變量,因此:
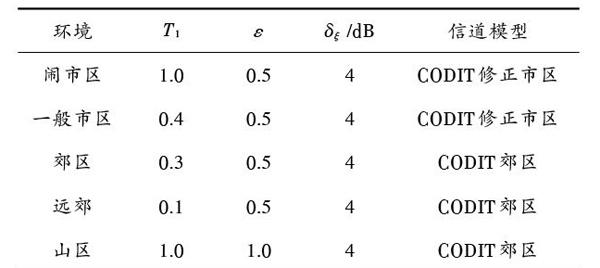
式中:[d]是MS與BS之間的距離;[Ti]為[Trms]在[di=1] km時的中值;[ε]為0.5~1之間的一個常數;[ξ]為服從0均值的對數正態分布的隨機變量,標準差[δξ]為4~6 dB(即[10log ξ]是零均值、標準差為[δξ]的服從正態分布的隨機變量)。
不同環境下的具體參數由T1P1模型中的Greenstein模型給出,如表1所
表1 ?不同信道環境下的Greenstein模型參數
式中:[n′i,1]服從[N]([0,δ2ni,1+δ2NLOSi,1])分布。如此就使誤差分布符合CHAN算法的ML估計條件,然后就可以將CHAN算法應用于優化后的NLOS測量值,進行MS的位置估算。
3 ?組合定位TDOA算法概述
通常在TDOA定位中,當基站數大于3時,將會產生一組冗余方程。為了得到更精確的定位坐標,特別是當考慮到測量的方差與協方差時,需要對定位方程進行算法優化。因此本文選擇遞歸的Taylor級數展開法和非遞歸的CHAN算法。
根據TDOA定位原理,可以設已知基站[i]坐標為([xi,yi]),而移動臺MS的坐標為([x,y]),因此MS到基站[i]的距離為:
將[Ri],[x,y]都看作未知數,然后在基站數大于4時,至少能得到一組冗余方程,求解此方程組就能得到定位結果。目前,有多種方法用于求解這一類的線性方程組,如FANG,CHAN,Taylor,SX,SI,DAC等,其中CHAN算法和Taylor級數展開法是最常使用的兩種算法[11]。
Taylor級數法通過Taylor級數展開法對方程組(15)進行線性化,然后采用迭代法求解線性方程組。迭代方法以猜測初始值開始,通過確定局部線性最小二乘(LS)解決方案來改進每次迭代的估計。由此Taylor級數可以提供準確的結果。更具體地說,即該方法利用一組TDOA估計,以未知MT的移動位置[(x,y)]的初始猜測[(x0,y0)]開始,并且以此計算位置估計的偏差。公式表明Taylor級數展開法能得到較準確的計算結果,還能利用冗余的測量值提高定位的精度。但在實際應用中,尤其是NLOS誤差的影響下,MT的初始位置很難確定,因而導致Taylor級數展開法有可能得不到收斂的結果,因此將LOS測量值使用Taylor級數展開法求解定位,可以有效避免這種情況的發生。
CHAN氏算法是一種具有解析表達式解(Closed Form Solution)的非遞歸雙曲線方程算法。該算法的特點是計算量小,在噪聲服從高斯分布的環境下,定位精度高。但在非視距環境下,CHAN氏算法的定位精度顯著下降[10]。在4個以上基站的CHAN算法上,當TDOA距離差誤差較小時,該算法的性能能達到CRLB(克拉美羅下界),但是整個算法的推導都是基于測量噪聲服從零均值高斯隨機分布這個前提,因此在實際的NLOS環境下,信道的環境誤差會較大,CHAN算法的性能將受到較大影響,因此本文之前對NLOS誤差進行了一定程度的優化,使優化后的NLOS測量值盡量滿足CHAN算法的定位條件。
由前面的描述可知,在實際的NLOS環境下CHAN算法定位性能大受影響,而Taylor算法甚至可能得不到定位結果。因此,直接使用這兩種算法進行組合定位并不是一個好想法。為了達到在NLOS環境下的定位精度要求,需要將CHAN算法和Taylor算法進行分離計算然后再進行加權,進而得到一種適用于NLOS環境的組合算法。
一般情況下,兩種算法估計器的組合是使用CHAN算法估計器來初始化Taylor算法估計器,即直接通過CHAN算法進行測量數據的初始定位,然后將其作為Taylor級數展開法的初始值。但是,使用CHAN算法的估計值來作為Taylor算法的初值,盡管Taylor估計器的結果將略微改善,但是這種算法的有效性是值得懷疑的,因為它違反了數據的獨立性假設。所以,本文將CHAN算法和Taylor級數展開法分別應用于NLOS和LOS測量數據得到初步估計值,然后進行簡化的殘差加權計算,得到全新的定位估計。
假設TDOA測量值數目為[N],[Xi]和[Xj]則分別為該算法參與定位的基站坐標,[X0]是服務基站坐標,由Taylor和CHAN算法得到的初始定位坐標為[Xt]和[Xc],[Zt]和[Zc]分別是Taylor和CHAN算法的權系數:
4 ?仿真描述、結果及分析
本文的信道仿真采用T1P1模型,仿真條件如下:小區半徑[R=]3 000 m,基站數(BS)為7。假設在LOS情況下,測量誤差服從零均值理想高斯分布,標準差[σ]分別取值為30 μs,45 μs,60 μs,75 μs,90 μs,105 μs,120 μs,135 μs,150 μs。對于初始的真實移動位置,增加了由零均值和給定標準偏差的高斯噪聲產生的隨機擾動,在此基礎上按照COST259模型來增加NLOS誤差,每次仿真運行的次數為10 000次,本文采用定位結果的均方根誤差來表示定位精度。其中,均方根誤差(RMSE)的表達式近似為:
為了簡化終端的復雜度和降低終端功耗,NB?IoT被設計應用于低速率、弱移動的應用場景(如智能抄表、智能停車),同時NB?IoT不支持連接態的移動管理,并直接使用小區搜索和同步代替了切換和測量報告等功能。因此,在仿真模型中可以假定MS的移動速度極慢或者靜止,假定周圍環境不會有大的變化,故不同時刻的測量值之間有著較強的相關性。
CHAN?Taylor算法在不同基站數下的算法性能如圖2所示。在實際應用中,這種算法不對NLOS和LOS進行鑒別,并假設每個測量基站全都有NLOS誤差,因此這種算法相當于浪費所有的LOS測量數據。
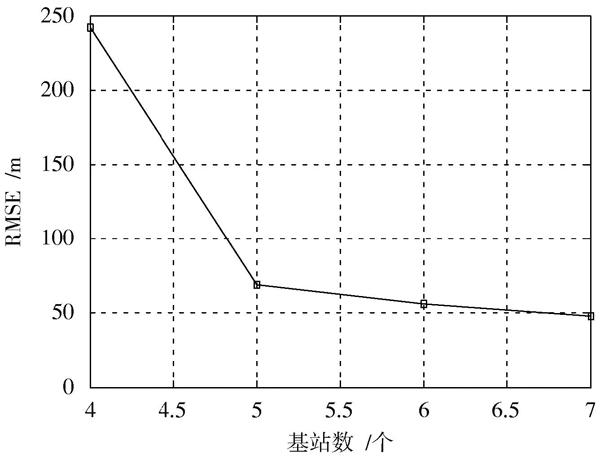
如圖3所示是本文組合算法的性能,圖4是理想情況不同基站下克拉美羅下界(CRLB)。仿真中的基站數是指NLOS基站數,LOS基站采用極端條件下最少的4基站假設,在相同參數設置下,本文組合算法的定位性能明顯優于不進行NLOS鑒別的協同算法,仿真得到的誤差大小也更接近克拉美羅下界(CRLB)。這也證明了在CHAN或Taylor估計量理想的情況下,其相關殘差結果在理論上總是小于其對應值。從圖4中可以看出,當有4組LOS和5組NLOS測量數據時,算法的性能就已經可以達到精度需求:運營商要求為67%的NB?IoT UE提供50 m水平精度的解決方案[12]。
圖2 ?CHAN?Taylor算法的性能
圖3 ?組合算法的性能

對于NB?IoT最高可達164 dB的覆蓋能力來說,在實際使用中獲取9組TDOA測量值是很容易的,同時本算法在實際環境中如果能得到更多組數據,也能有效提高本算法的定位精度。
圖4 ?RMSE與基站數目的關系
5 ?結 ?語
當信號在非視距環境中傳播時,同時存在LOS和NLOS測量值,因此本文采用最小二乘法的改進方法來鑒別非視距誤差,然后針對兩種不同誤差進行組合定位。根據仿真結果,與其他方法相比,這種方法具有更好的定位精度。本文算法雖然有較好的定位效果,但也有一定的缺點。如需要多次測量來減少NLOS誤差的影響,就犧牲了一定的保密安全性并加大了系統開銷;與傳統協同算法相比復雜度有所增加,因此系統時延較大,無法應用于移動態的終端。相信通過對組合定位算法的不斷改進,它可以適應更多更復雜的環境,相信在未來5G的大規模物聯網通信中有更好的應用前景。
注:本文通訊作者為符杰林。
參考文獻
[1] WANG Y, SUN X, HU N, et al. A mobile localization strategy for wireless sensor network in NLOS conditions [J]. China communications, 2016, 13(10): 69?78.
[2] YAN L, LU Y, ZHANG Y. An improved NLOS identification and mitigation approach for target tracking in wireless sensor networks [J]. IEEE access, 2017, 5: 2798?2807.
[3] WANG Y, CHENG L, HU N. Bayes sequential test based NLOS localization method for wireless sensor network [C]// 2015 Chinese Control and Decision Conference. Qingdao, China: IEEE, 2015: 5230?5234.
[4] GAO S, ZHANG F, WANG G. NLOS error mitigation for TOA?based source localization with unknown transmission time [J]. IEEE sensors journal, 2017, 17(12): 3605?3606.
[5] ZHENG Fei, ZHENG Jiyu. Application research of TDOA based CHAN algorithm under the circumstances of LOS and NLOS in UWB system [J]. Application of electronic technique, 2007, 33(11): 110?113.
[6] LU Yin, WANG Baoquan, QIU Jinwei. Study on localization of CHAN Algorithm in LOS and NLOS environment [J]. Computer technology and development, 2015(9): 61?65.
[7] CHENG Long, QI Qianyue, WU Xuehan, et al. A NLOS selection based localization method for wireless sensor network [C]// 2017 International Conference on Electronics Information and Emergency Communication. [S.l.]: IEEE, 2017: 340?343.
[8] HE Y, LI H. A non?line?of?sight error mitigation method in wireless location system [C]// 2009 IEEE International Confe?rence on Computer Science and Information Technology. Beijing: IEEE, 2009: 282?286.
[9] LIN X, BERGMAN J, GUNNARSSON F, et al. Positioning for the Internet of Things: a 3GPP perspective [J]. IEEE communications magazine, 2017, 55(12): 179?185.
[10] DENG P, LIU L, FAN P. A collaborative location model for mobile position estimation [C]// 2003 International Conference on Parallel and Distributed Computing, Applications and Technologies. Chengdu, China: IEEE, 2003: 364?366.
[11] GU Qunying, LI Wenyuan, HE Huan. Time?based cellular system wireless location technology [J]. Modern electronics technique, 2007, 30(7): 31?34.
[12] Ericsson. R1?168553, New simulator for positioning of NB?IoT, RAN1#86 [R]. Japan: Ericsson, 2016.
