基于線陣超聲探頭多波束并行發射的頸動脈血流多點頻譜多普勒分析
2019-06-17 02:17:42高晗何瓊陳胤燃羅建文
中國醫療設備 2019年5期
關鍵詞:實驗
高晗,何瓊,陳胤燃,羅建文
清華大學 醫學院 生物醫學工程系,北京 100084
引言
在全球范圍內,心血管疾病是人類的主要死亡原因之一[1]。近年來,我國心血管疾病的發病人數也在持續增加[2]。在諸多心血管疾病中,動脈粥樣硬化所致的頸動脈狹窄多發于頸內動脈,導致腦部供血異常[3-5]。目前,判斷頸內動脈狹窄的常規手段是頸部B模式超聲檢測或者頻譜多普勒超聲檢測[3]。美國超聲醫師學會在2003年舊金山會議共識聲明中推薦了頸內動脈狹窄的判斷標準,給出了頸動脈相關生理參數的臨床參考值,包括頸內動脈(Internal Carotid Artery,ICA)與頸總動脈(Common Carotid Artery,CCA)的血流峰值流速(Peak Systolic Velocity,PSV)的比值,簡單表示為R值[4-5]。
傳統的脈沖多普勒技術一次只能選擇血管中的某一位置進行采樣,進而分析得到頻譜多普勒圖像。如果需要測量頸內動脈與頸總動脈的血流峰值流速比值,通常需要二次測量,在觀察到頸總動脈后,沿頸總動脈長軸向上追蹤至頸動脈分叉處和頸內動脈[4];先后選取不同位置的采樣體積,分別測量頸總動脈和頸內動脈的血流峰值流速。而脈沖多普勒的能量輸出較一般二維B模式成像的能量輸出高,進行快速的檢查有利于減少患者接受超聲輻射的時間[6]。先后分別測量頸總動脈和頸內動脈的血流峰值流速,因為測得的峰值流速并不屬于同一個心動周期,成像截面也可能并不一致,所以可能引入一定的誤差。在超聲成像領域,借助超聲多波束并行發射技術(Multi-Line Transmission,MLT)有可能實現血管中多個位置的同時采樣分析,進而簡化操作流程,縮短檢查時間。
國際上,超聲多波束并行發射技術的研究主要集中在基于相控陣超聲探頭的心臟成像[7-9],基于線陣超聲探頭的多波束并行發射技術的探究較少,而且也尚未用于頸動脈血流測量[10]。本文將基于線陣超聲探頭,實現多波束并行發射技術;進一步,同時獲得血管中多個采樣體積的頻譜多普勒圖像;為了驗證方法的可靠性,將把多波束并行發射的實驗結果同目前臨床廣泛使用的單波束發射以及近年來引起關注的平面波發射的實驗結果進行對比分析。
1.方法
1.1 脈沖多普勒技術
使用超聲探頭,發射超聲脈沖后,通過距離采樣門獲取某一深度采樣體積對應的超聲回波信號,采樣體積的大小和深度都可以通過距離選通門調節。持續發射超聲脈沖,并對采樣體積對應的超聲回波信號進行持續采樣,得到該采樣體積沿慢時方向的一組回波信號。對該組回波信號進行離散短時傅里葉變換,如式(1):

上式中x(n)為采樣體積沿慢時方向的回波信號為一個M點的窗函數,m和k分別為輸出的離散時間變量和離散頻率變量[11],對其進行對數壓縮等優化處理[12],即可得到頻譜多普勒圖像,顯示出不同血流速度的分布以及隨時間的變化。
1.2 線陣探頭多波束并行發射可行性驗證
應用超聲仿真軟件Field II[13],對線陣探頭的發射聲場進行仿真。在傳統的聚焦波發射即單波束發射(Single-Line Transmission,SLT)的基礎上,對探頭各個陣元對應的脈沖發射延時和變跡進行改動。利用特殊形式的延時和變跡,將線陣探頭的孔徑進行分塊,得到若干子孔徑,每一子孔徑內均采用類似單波束發射的發射延時;同時,為了抑制多波束并行發射時交叉偽影(crosstalk)的影響,每個子孔徑均施加一定的變跡[14],以實現多個子孔徑同時發射波束,即多波束并行發射。為了方便理解,圖1給出了三波束并行發射(3-MLT)時在128陣元的線陣探頭上設置的發射延時以及變跡,波束向左偏轉10°,每個子孔徑采用漢寧窗變跡。通過仿真發射聲場,可見看出這樣的發射延時以及變跡可以產生三條波束同時發射的效果。
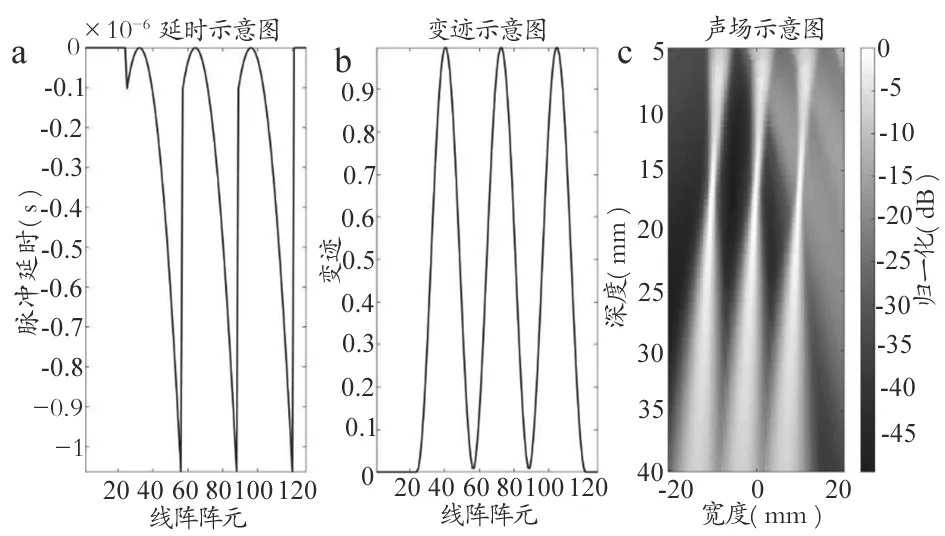
圖1 線陣探頭三波束并行發射的脈沖延時和變跡設置以及對應的聲場分布
1.3 實驗
1.3.1 采集模式及參數
為了定量探究多波束并行發射測量結果的準確性,我們除了使用多波束并行發射模式外,還采用單波束發射模式以及平面波發射模式,三種發射模式均進行仿真、仿體和在體實驗,實驗采集參數如表1所示。
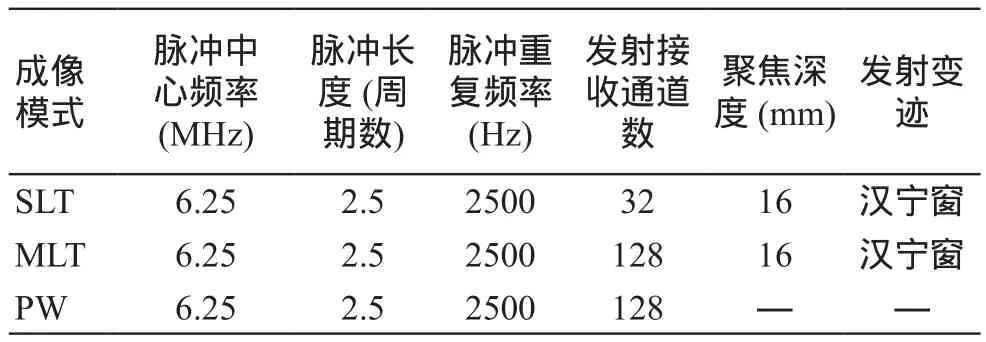
表1 實驗采集參數設置
表1 中,多波束并行發射時采用漢寧窗變跡指的是在線陣探頭的每一個子孔徑內均采用該變跡。
1.3.2 仿真實驗
應用超聲仿真軟件Field II,在二維空間(橫向尺寸40 mm,軸向尺寸35 mm)設置隨機分布的散射子,每單位面積約分布個散射子,為發射脈沖的波長。二維空間的中間位置處(深度15~20 mm)存在一水平直管,直管管半徑為2.5 mm,周圍組織與管內散射子的強度比為 40 dB。
管內散射子的運動速度遵循拋物線型血流分布,即:

其中,V(r)是隨直管徑向位置而改變的速度值,Vmax為最大速度值,R為直管半徑。頸動脈血液峰值流速一般在1m/s左右[4-5],所以Vmax設置為1 m/s。仿真實驗中,線陣探頭陣元間距設置為0.3 mm;采用三波束并行發射,單波束發射、三波束并行發射和平面波發射的發射偏角均設置為10°;單波束發射焦點的橫向坐標為0 mm,三波束并行發射的三個焦點的橫坐標分別為-10、0和10 mm。
1.3.3 仿體實驗
使用256發射接收通道的Vantage超聲采集系統(Verasonics公司,美國)和L10-5線陣探頭(嘉瑞公司,中國),對Gammax 1425A標準血流仿體(Gammax公司,美國)進行實驗。該仿體內含一個電控流體泵和一個循環流體管腔,管腔內封裝有特殊流體,該流體在聲學特性上和人體血液相似 :聲速大小為 (1550±10) m/s,密度為 1.03 g/cm3,流體內含微粒平均直徑為4.7 μm,微粒濃度為20 mg/mL。通過電控流體泵控制流體在管腔內循環流動的速率,在水平直管部位產生穩定的拋物線型層流。圖2為該仿體內部結構示意圖,水平直管位于仿體淺表部位,在深度為20 mm處有一個直徑5 mm的水平直管,設置其內流速最大值為1 m/s。同仿真實驗類似,仿體實驗中,單波束發射、三波束并行發射和平面波發射的發射偏角均設置為10°,單波束發射焦點的橫向坐標為0 mm,三波束并行發射的三個焦點的橫坐標分別為-10、0和10 mm。
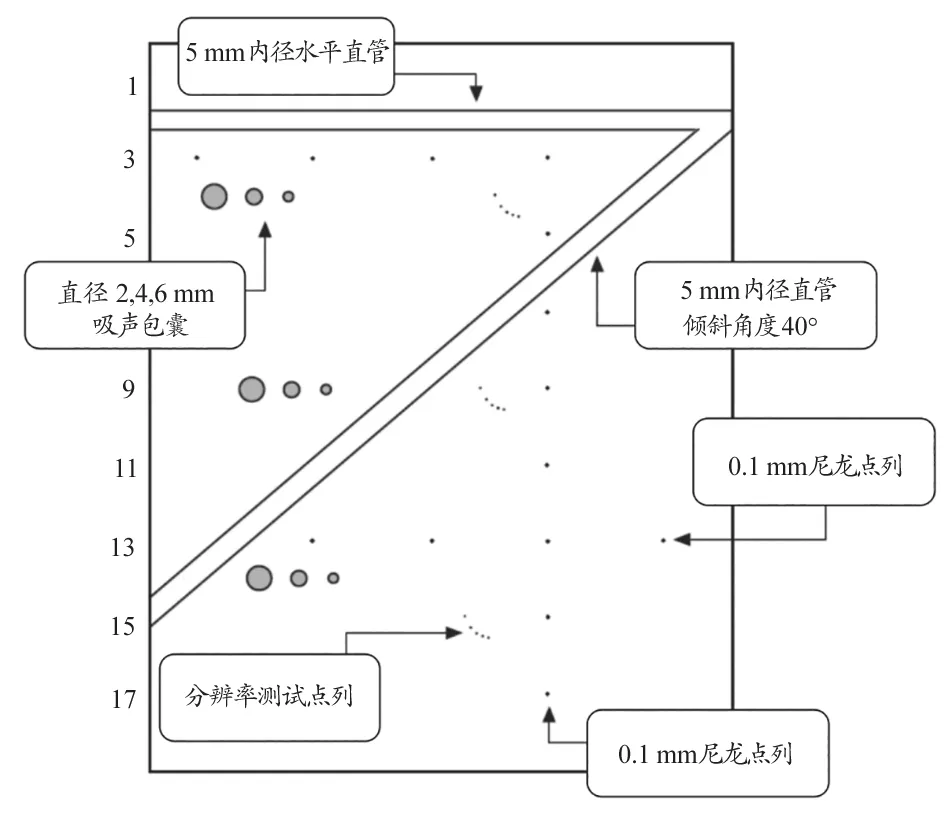
圖2 Gammax 1425A標準血流仿體內部結構示意圖
1.3.4 在體實驗
使用Vantage超聲采集系統掃描健康志愿者的左頸動脈分叉處,采集序列分為四個階段:單波束發射掃描頸總動脈;單波束發射掃描頸內動脈;雙波束并行發射掃描以及平面波發射掃描。每個階段采集時長2.5 s,雙波束并行發射的兩個聚焦位置和單波束分別掃描頸總動脈和頸內動脈的兩個聚焦位置一致。雙波束并行發射和平面波發射掃描時,因為頸總動脈和頸內動脈血管不是沿水平方向,而且二者走向不一致,所以不設置發射偏角,后期根據B模式圖像在數據處理時進行角度修正。頸總動脈和頸內動脈內采樣體積的橫坐標分別為-15 mm和15 mm。
1.3.5 數據采集及分析
在單波束發射模式中,每次發射一個固定位置的聚焦波束,使用脈沖多普勒技術,沿波束方向選取不同深度的采樣體積,進行頻譜多普勒分析,得到相應的頻譜多普勒圖像。在多波束發射模式中,同時發射若干條聚焦波束,在每一條波束方向上,都可以選取不同深度的采樣體積,進行頻譜多普勒分析,從而同時獲取多個不同波束位置上的頻譜多普勒圖像。在平面波發射模式中,所有陣元同時發射超聲脈沖,形成平面波;這可以簡單理解為掃描區域內的所有波束同時發射,因此,可以選取掃描區域內的任何一個位置作為采樣體積,進而分析得到其頻譜多普勒圖像。
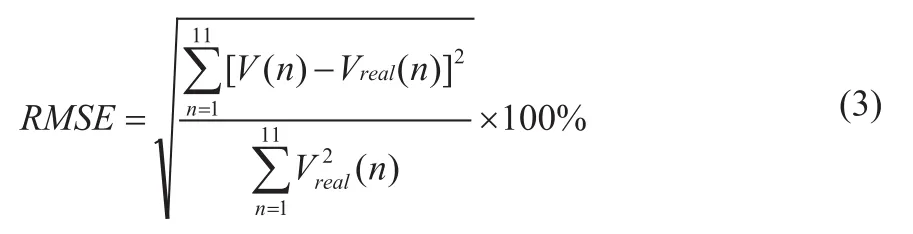
仿真和仿體實驗中,直管內的流體為穩定層流,通過頻譜多普勒圖像可以得到管內不同深度的流體速度大小,進而可以和拋物線型穩定層流的理論速度曲線進行定量比較,直管內徑為5 mm,選取0.5 mm為采樣間隔,在管內獲取11個采樣體積的流體速度大小,按下式計算其與理論值之間的均方根誤差(RMSE)[15],比較得到不同發射模式間誤差的相對大小。
在體實驗中,可以得到波束方向上某一深度采樣體積的頻譜多普勒圖像,而頻譜隨心動周期呈現出規律性的周期變化。因為在體實驗缺乏理論真值,所以我們選取臨床上廣泛接受的單波束發射的測量結果作為參照,在頸總動脈和頸內動脈處,均獲得三種發射方式的頻譜多普勒圖像,使用形態學方法進一步得到頻譜包絡[12]。按下式分別計算多波束并行發射和平面波發射獲得的頻譜包絡相對于單波束發射獲得的頻譜包絡之間的相關系數[15],從而定量評估不同方法的結果。

仿體和在體實驗中,通過超聲采集系統獲得超聲通道數據后,通過傳統的延時疊加方式進行波束合成,得到波束合成后的超聲射頻數據。進一步,通過離散短時傅里葉變換獲得頻譜多普勒圖像,其中,軸向數據采樣窗的大小選為1 mm,慢時方向采用漢明窗,窗長為51.2 ms(128點),窗移動步長為3.2 ms (8點)。以上步驟均使用MATLAB軟件進行離線處理。
2 結果
2.1 仿真實驗
仿真實驗得到的結果如圖3所示,圖3a為仿真模型的B模式圖像。單波束發射模式始終掃描圖中如白色實線所示的位置;多波束并行發射模式除了掃描白色實線對應的位置外,還可以同時掃描兩條白色虛線對應的位置;平面波發射模式則可以對B模式圖像中的任意位置進行掃描。我們選取白色實線位置處三種發射模式測量得到的流體速度分布曲線,如圖3b所示。計算測量的流體速度分布和理論值之間的均方根誤差,得到單波束發射、多波束并行發射和平面波發射三種模式的均方根誤差分別為16%、16%和14%。
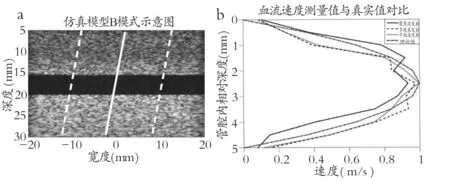
圖3 三種掃描模式的仿真實驗結果
2.2 仿體實驗
仿體實驗的結果如圖4。圖4a為血流仿體的B模式示意圖。與仿真實驗一樣,白色實線表示單波束發射模式掃描的位置;多波束并行發射除了掃描白色實線對應的位置外,還可以同時掃描另外兩條白色虛線對應的位置;平面波發射模式可以對B模式圖像的任意位置進行掃描。同樣地,選取白色實線位置處三種發射模式測量出來的流體速度分布曲線,如圖4b所示。單波束發射、多波束并行發射和平面波發射三種模式測量的流體速度分布和理論值之間的均方根誤差分別為20%、18%和18%。
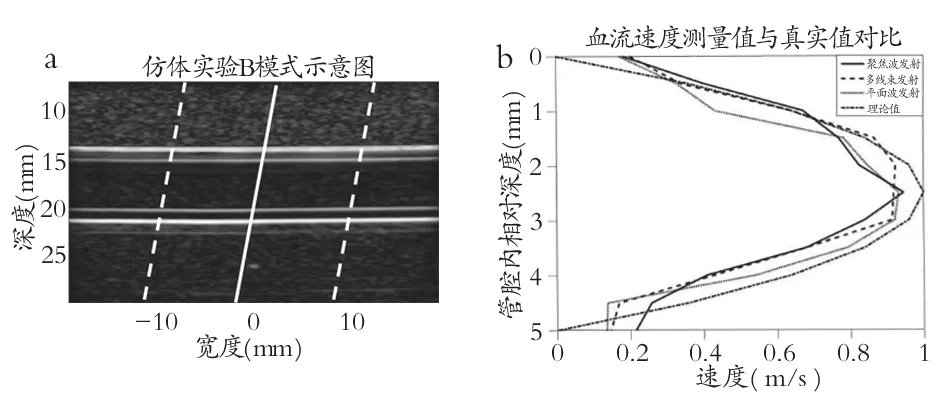
圖4 三種掃描模式的仿體實驗結果
2.3 在體實驗
健康志愿者頸動脈分叉處的在體實驗結果如圖5所示。在圖5a的B模式示意圖中,圓點表示頸總動脈中選取的采樣體積,方點表示頸內動脈中選取的采樣體積。如前文所述,使用三種掃描方式,采集時長共10 s,分別得到圓點和方點處的頻譜多普勒圖像,如圖5b和5c所示。圖5b和5c中,白色虛線將圖像分為Ⅰ、Ⅱ、Ⅲ和Ⅳ四段,分別對應前文所述的四個掃描階段:單波束發射掃描頸總動脈;單波束發射掃描頸內動脈;雙波束并行發射掃描以及平面波發射掃描。單波束發射模式來只能選擇一個采樣體積,所以在獲得頸總動脈頻譜圖像的同時,無法得到頸內動脈的數據,圖5b中Ⅱ部分表現為空白;同理,圖c中Ⅰ部分表現為空白。圖5b和5c中,白色實線顯示了頻譜包絡。對于頸總動脈處的采樣體積,選取單波束發射模式的頻譜包絡(圖5b中Ⅰ部分內的白色曲線)作為參考,可以計算出多波束并行發射的頻譜包絡(圖5b中Ⅲ部分內的白色曲線)和單波束發射的頻譜包絡的相關系數為0.92,平面波發射的頻譜包絡(圖5b中Ⅳ部分內的白色曲線)和單波束發射的頻譜包絡的相關系數為0.81。對于頸內動脈處的采樣體積,同樣選取單波束發射模式的頻譜包絡(圖5c中Ⅱ部分內的白色曲線)作為參考,可以計算出多波束并行發射的頻譜包絡(圖5c中Ⅲ部分內的白色曲線)和單波束發射的頻譜包絡的相關系數為0.80,平面波發射的頻譜包絡(圖5c中Ⅳ部分內的白色曲線)和單波束發射的頻譜包絡的相關系數為0.71。在單波束發射模式中,我們需要通過兩次測量得到R值,為0.89;在多波束并行發射和平面波發射模式中,我們都可以通過一次測量得到R值的大小,分別為0.90與0.93。
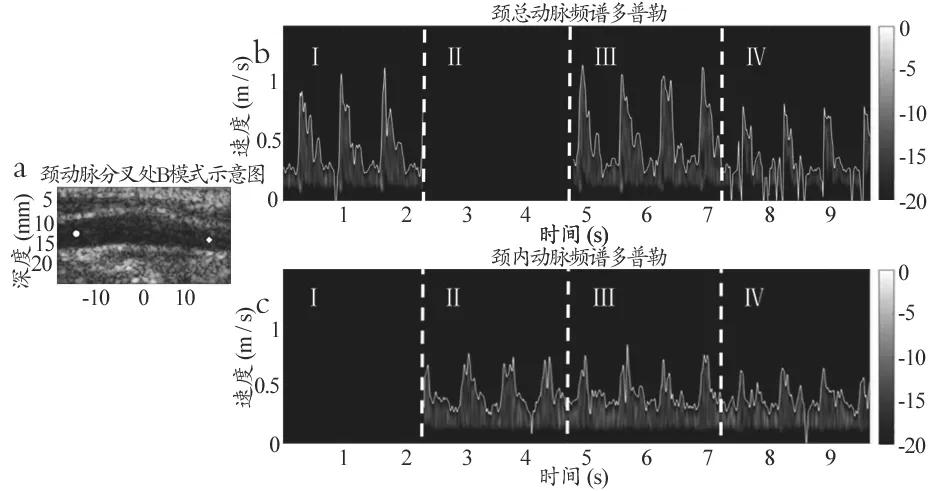
圖5 三種掃描模式的在體實驗結果
3 討論和結論
單波束發射是目前商用超聲設備最常用的發射模式。通過仿真實驗和仿體實驗,我們可以發現,多波束并行發射和單波束發射的流體速度測量誤差相近。而在體實驗中,多波束并行發射可以同時獲取多個位置采樣體積的頻譜多普勒圖像。本研究同時選取了位于頸總動脈和頸內動脈的兩個采樣體積,相比于單波束發射測量,減少了多次測量,簡化了操作流程,縮短了檢查時間。在體實驗中,多波束并行發射和單波束發射獲得的頻譜包絡之間的相關系數較高,說明多波束并行發射的血流速度測量準確性與目前臨床常用的單波束發射相近。
平面波發射是近年來超聲成像研究領域的熱點,在頻譜多普勒分析上具有很大的潛力。在平面波發射模式中,每次發射都采集整個視野范圍內的回波信號;所以,通過平面波發射的持續采集,可以獲取任何一個位置的頻譜多普勒圖像[16-19]。但是,這種特殊的發射模式導致視野范圍內的能量分布較為分散,進而導致圖像的分辨率和對比度降低[20-21]。所以,在體實驗中,我們可以看到平面波發射得到的頻譜多普勒圖像連續性較差。相關系數的計算也表明,相較于平面波發射,多波束并行發射的頻譜包絡測量結果更接近單波束發射的結果。
多波束并行發射也存在一定的局限。相較于傳統的單波束發射,多波束并行發射需要系統具備任意波形發生器,以產生特定的聲場分布[14]。平面波發射時,超聲設備需要采集通道數據,設備硬件層面的系統架構需要重新搭建,系統的數據并行采集及處理能力都需要提升[22-23];多波束并行發射并不需要系統采集通道數據。在未來,基于線陣探頭的多波束并行發射在參數優化以及硬件實現方面依舊需要更加細致的研究。盡管如此,隨著研究的不斷深入和工業技術的不斷發展,多波束并行發射的潛力還將得到進一步的挖掘。
本研究基于線陣超聲探頭,實現了多波束并行發射,并將之用于頸動脈血流的多點頻譜多普勒檢測。仿真和仿體實驗中,單波束發射、多波束并行發射和平面波發射三種發射模式的誤差相當;在體實驗表明,較于傳統的單波束發射,在不犧牲原有準確性的基礎上,多波束并行發射可以通過一次操作同時獲得頸總動脈和頸內動脈的頻譜多普勒圖像。因此,基于線陣超聲探頭的多波束并行發射是一種有效且便捷地進行頸動脈血流多點頻譜多普勒分析的方法。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55