垃圾分揀機械手的設計及性能仿真研究
2019-06-15 03:31:35韓偉娜張偉聰韓旭
現代電子技術 2019年12期
關鍵詞:智能控制
韓偉娜 張偉聰 韓旭
摘 ?要: 以往采用六自由度機械手進行垃圾分揀時,由于其自身重量較大,耗能偏高,導致機械手工作時移動速度較慢,分揀效率較低。因此,文中設計新的垃圾分揀機械手,其硬件由垃圾機械手手部結構與末端執行器組成。軟件部分設計垃圾機械手智能控制流程,在垃圾分揀路徑規劃中優化目標垃圾函數,并設計基于遺傳算法的最優分揀路徑策略,獲取準確的垃圾分揀目標和分揀最優路徑。實驗結果表明,所設計的垃圾分揀機械手可有效分揀垃圾,分揀準確度高達99%,機械手的系統穩定性為0.40,具有分揀準確度高以及穩定性好等優勢。
關鍵詞: 垃圾分揀; 機械手; 目標函數優化; 智能控制; 分揀路徑優化; 性能仿真
中圖分類號: TN830.1?34; TP391.1 ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2019)12?0086?04
Abstract: The past six?degree?of?freedom manipulator used for garbage sorting is heavy in weight and has high energy consumption, resulting in slow moving speed and sorting efficiency during manipulator operation. Therefore, a new garbage sorting manipulator is designed in this paper. The hardware of the manipulator is composed of the garbage manipulator hand structure and end?effector. In the software part, the intelligent control flow is designed for the garbage manipulator. The objective garbage function is optimized during the garbage sorting path planning. The optimal sorting path strategy based on the genetic algorithm is designed to obtain the accurate garbage sorting target and optimal sorting path. The experimental results show that the designed garbage sorting manipulator can effectively sort garbage, and has the advantages of high sorting accuracy of 99% and good system stability of 0.40.
Keywords: garbage sorting; manipulator; objective function optimization; intelligent control; sorting path optimization; performance simulation
0 ?引 ?言
目前工廠里的車間切屑垃圾較多,傳統方法用鏟子進行處理時,操作較難又費力,工作者有可能被劃傷,存在較高的安全隱患;鄉村河道里,常見有水草、青苔、樹枝、樹葉、木材和泥沙等垃圾物;沿海中,常見海草、貝殼等海生物垃圾物;除此之外,人們生活中常見的醫療垃圾、建筑垃圾、生活垃圾等,對這些垃圾的處理難度極高。但隨著科技化的工業技術的發展,垃圾機械手逐漸進入人們生活的各個角落,垃圾機械手工作強度高、靈活性強,尤其是在高溫、低溫、深水等不利于人們動手操作的領域都能進行工作。
因此,垃圾機械手的研究也成為眼下眾多相關學者研究的熱點問題。如文獻[1]提出六自由度機械手三維可視化仿真研究,由于其自身重量較大,耗能偏高,導致工作時移動速度較慢,分揀效率低下;文獻[2]提出分析智能分揀系統,在本校PIVAS中試用,雖然可以代替人工分揀,但是與其他分揀系統相比分揀準確度存在一定的誤差;文獻[3]針對SCARA機械手的軌跡規劃及運動學進行分析,由于該機械手只適用于平面定位分揀,因此存在一定的分揀局限性。針對上述存在的問題,本文設計一種垃圾分揀機械手,其優勢在于在垃圾分揀路徑規劃中采用了優化目標垃圾函數和基于遺傳算法的最優分揀路徑策略,使其進行垃圾分揀時具有高效性與準確性。
1 ?垃圾分揀機械手的設計
1.1 ?垃圾機械手硬件結構設計
若想讓設計的垃圾機械手能夠進行上下運動、旋轉運動、前后移動、手爪張合等運動需要研究垃圾機械手必備的自由度,去除無效的自由度[4?5]。無效自由度容易導致機械手復雜度增多,對機械手的控制較為困難,而自由度又不可或缺,否則會導致機械手不能正常工作。垃圾機械手硬件結構圖如圖1所示。
圖1 ?垃圾機械手硬件結構圖
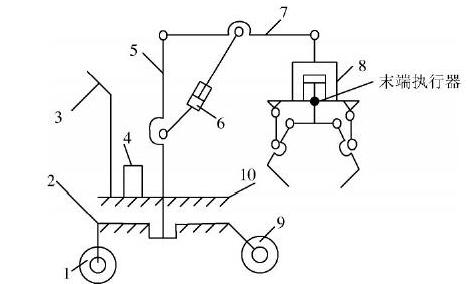
圖1中:數字1為固定輪;數字2為底座;數字3為手把;數字4為手動液壓泵組建;數字5為立柱;數字6為升降液壓缸;數字7為搖臂;數字8為手部;數字9為萬向輪;數字10為轉盤。所設計垃圾機械手中包含手部8、搖臂7、立柱5、手動液壓泵組件4、升降液壓缸6、轉盤10、底座2等部件。
垃圾機械手手部構造圖如圖2所示。
圖2 ?垃圾機械手手部構造圖
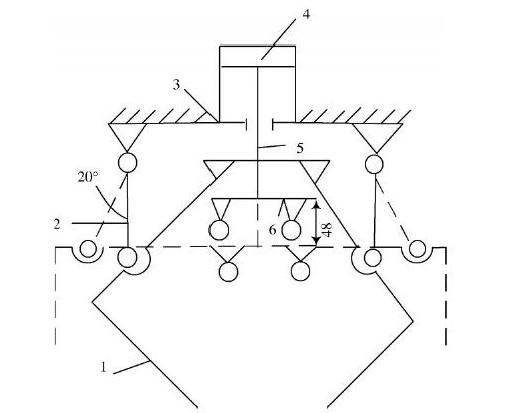
圖2中:數字1為手爪;數字2為搖桿;數字3為機架;數字4為抓取液壓缸;數字5為活塞桿;數字6為連接板。手部包含了抓取液壓缸4與手部運動鏈,抓取液壓缸4裝置在機架3上,通過活塞桿5和連接板6相連。手部要求可以完成兩個運動動作,第一是手爪1的張開,第二是手爪1的閉合。手爪1的張開與閉合通過手部運動鏈來完成。手部運動鏈是由兩套平面六面桿機構構成的組合機構,兩套機構設計在連接板6的對角面里,使用同一個導桿(活塞桿5)。平面桿機構的構成包括1個導桿5、2個搖桿2、2個手爪1與機架3。若導桿進行直線運動,則經過組合機構,完成4個手爪的張合運動[6]。
平面六桿機構進行運動的要求是:自由度數量與原動件數目相同。自由度數量由構件的數量、運動副的種類與數量。其計算流程公式為:
式中:[Z]代表自由度數;[a]代表活動構件數;[Xi]代表低副數;[Xj]代表高副數。
平面六桿結構原動件是1個導桿(活塞桿),則此機構具備確定角度的運動[7]。
手部張開與閉合的位置見圖2,經過運動仿真分析機械手手部張開與閉合的位置。確定了在4個搖桿2個垂直狀態時,4個手爪1位于閉合位置,圖2中實線的位置即是。在4個搖桿2個位于擺角位置時,4個手爪1就是張開位置,圖2中虛線位置即是。
1.2 ?垃圾機械手軟件結構設計
1.2.1 ?垃圾機械手智能控制流程
垃圾機械手智能控制流程如圖3所示。系統初始化后確定全局圖像采集和垃圾位置后,對機械手夾持運動路徑實施規劃,基于獲取的目標垃圾圖像對機械手夾持運動路徑進行實施修正后,完成垃圾種類的識別,基于識別結果規劃合理的垃圾分揀路徑。
圖3 ?垃圾機械手智能控制流程

1.2.2 ?優化目標垃圾函數
為了讓垃圾機械手能夠準確分揀垃圾進行有效的工作,需要對其目標垃圾函數進行優化[8],垃圾機械手的運行速度是通過時間間隔序列[s1,s2,…,sβ]決定,所以優化目標垃圾函數公式為:
1.2.3 ?基于遺傳算法的最優分揀路徑策略
由于標準遺傳算法容易出現成熟前收斂的弊端,結合本文第1.2.2設計的優化目標垃圾函數,對標準遺傳算法進行以下改進設計:
1) 最佳保留。不根據比例選取垃圾機械手的運行路徑,而是留有目前獲取垃圾機械手的運行路徑的最佳值(即超個體),這個超個體不參加遺傳作用。在路徑選取前或選取后獲取目前路徑最優解的改進算法,最終可以收斂至全局最佳值。
收斂至全局最優解就是不斷保留目前最優解的結果。而此條件會降低算法的效率,所以會導致一些個體早熟與減小種群多樣性,因此,本文對此設計進行如下改進。
2) 操作結果的取舍。根據影響因子U的大小判定個體的后代個數,影響因素大,那么繁殖的后代則多。
3) 變異算子。變異算子用于根據變異,補償種群在某一位或許會缺少的基因,保障遺傳算法能夠獲取到空間里全部點。依據種群情況,動態調整變異概率的方法為:
式中:[gm]為初始變異概率;[b]為不小于1的常數;[i]為常數;[j]為最優解保持不變的代數。
如此一來,若出現早熟,最優解保持不變,變異概率逐漸增大,直到算法最終跳出局部極值點,獲取垃圾機械手的最優路徑[9]。
2 ?實驗分析
實驗采用本文所設計垃圾機械手、六自由度機械手以及SCARA機械手對某市的垃圾進行7次分揀實驗,統計3種機械手的穩定性、分揀準確度以及分揀速度增長率情況,對比結果分別如圖4~圖6所示。
圖4 ?三種機械手的穩定性測試結果
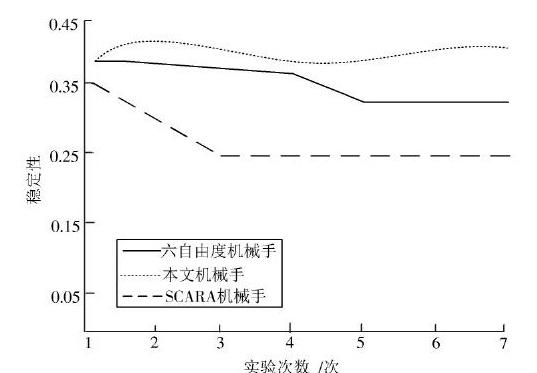
圖5 ?三種機械手的分揀準確度測試結果
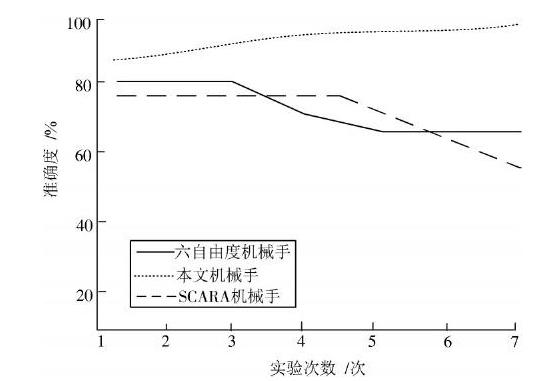
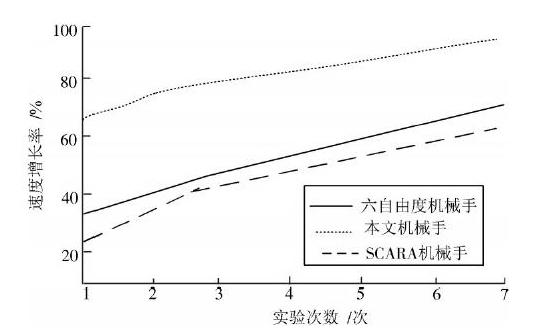
圖6 ?三種機械手的分揀速度增長率測試結果
分析圖4可知,隨著實驗次數的增加,六自由度機械手的系統穩定性最大值為0.38,最小值為0.32;本文所設計機械手的系統穩定性最大值為0.40,最小值為0.38;SCARA機械手的系統穩定性最大值為0.35,最小值為0.25。由此可知,本文所設計垃圾分揀機械手的穩定性最高。
分析圖5可知,隨著實驗次數的增多,六自由度機械手的分揀準確度最大值為80%,最小值為65%;本文所設計機械手的分揀準確度最大值為99%,最小值為85%;SCARA機械手的分揀準確度最大值為78%,最小值為60%。由此可知,本文所設計垃圾分揀機械手的分揀準確度最高。
分析圖6可知,隨著實驗次數的不斷增加,六自由度機械手的分揀速度增長率最大值為67%;本文所設計機械手的分揀速度增長率最大值為98%;SCARA機械手的分揀速度增長率最大值為61%。由此可知,本文所設計垃圾分揀機械手的分揀速度增長率最高。
綜上所述,本文方法整體性能較高,能夠準確且快速地完成垃圾的分揀工作,具有較高的實用性。
3 ?結 ?論
本文所設計垃圾分揀機械手主要從硬件和軟件兩方面描述機械手進行垃圾分揀的過程。實驗結果表明,本文所設計垃圾分揀機械手在5次分揀后剩余垃圾堆放處數目為0。實驗結果表明,本文方法可有效對垃圾進行分揀,且系統穩定性最大值為0.40、分揀準確度為99%、分揀速度增長率最大值為98%,具有高度的系統穩定性、分揀準確度以及分揀效率,具有較高的應用價值。
參考文獻
[1] 張智,鄒盛濤,李佳桐,等.六自由度機械手三維可視化仿真研究[J].計算機仿真,2015,32(2):374?377.
ZHANG Zhi, ZOU Shengtao, LI Jiatong, et al. Three?dimensional visual simulation research on six degrees of freedom manipulator [J]. Computer simulation, 2015, 32(2): 374?377.
[2] 尤曉明,李軼,郁文劉,等.智能分揀系統在我院PIVAS中的應用[J].中國藥房,2016,27(16):2248?2250.
YOU Xiaoming, LI Yi, YU Wenliu, et al. Establishment and application of intelligent sorting system in PIVAS of our hospital [J]. China pharmacy, 2016, 27(16): 2248?2250.
[3] 鄭華,陳軍,金鴻章.SCARA機器人運動學和視覺抓取研究[J].組合機床與自動化加工技術,2017(6):50?53.
ZHENG Hua, CHEN Jun, JIN Hongzhang. Research on kinematics and visual grapping SCARA robot [J]. Modular machine tool & automatic manufacturing technique, 2017(6): 50?53.
[4] 鐘小華,曹玉華,張永清,等.基于機器視覺技術的紅棗全表面信息無損分揀系統研究與實現[J].食品與機械,2017,33(5):114?118.
ZHONG Xiaohua, CAO Yuhua, ZHANG Yongqing, et al. Research and implementation of the non?destructive sorting system for full surface information of jujube based on machine vision technology [J]. Food & machinery, 2017, 33(5): 114?118.
[5] 陳東鳳.基于改進人工勢場的采摘仿生機械手設計和仿真研究[J].農機化研究,2017,39(5):231?235.
CHEN Dongfeng. Design and simulation of bionic picking manipulator based on improved artificial potential field [J]. Journal of agricultural mechanization research, 2017, 39(5): 231?235.
[6] 汪幫富,宋娟,趙衛東,等.基于PLC技術的液控分揀機械手的設計[J].機床與液壓,2016,44(3):19?23.
WANG Bangfu, SONG Juan, ZHAO Weidong, et al. Design of hydraulic control of industrial manipulator based on PLC in material sorting [J]. Machine tool & hydraulics, 2016, 44(3): 19?23.
[7] DHARANIDHARAN J, PUVIARASI R. A design of material sorting machine for garbage industries [J]. International journal of pharmacy and technology, 2016, 8(4): 20877?20885.
[8] 倪鶴鵬,劉亞男,張承瑞,等.基于機器視覺的Delta機器人分揀系統算法[J].機器人,2016,38(1):49?55.
NI Hepeng, LIU Yanan, ZHANG Chengrui, et al. Sorting system algorithms based on machine vision for delta robot [J]. Robot, 2016, 38(1): 49?55.
[9] ZUBOV V V, DOMNITSKIY A A, KARGIN R V. Corrigendum to calculation and choice of grip parameters for garbage truck manipulator [J]. Procedia engineering, 2015, 129: 896?902.
[10] 劉曉敏,黃水平,陳智欽,等.基于TRIZ與AD的海草夾苗機械手概念創新設計及可靠性研究[J].機械工程學報,2016,52(5):40?46.
LIU Xiaomin, HUANG Shuiping, CHEN Zhiqin, et al. Conceptual innovation design of seaweed planter manipulator based on TRIZ & AD and reliability analysis [J]. Journal of mechanical engineering, 2016, 52(5): 40?46.
猜你喜歡
卷宗(2016年10期)2017-01-21 15:33:38
科技創新與應用(2016年34期)2016-12-23 16:04:06
科技創新與應用(2016年34期)2016-12-23 09:52:55
電子技術與軟件工程(2016年20期)2016-12-21 11:36:49
電子技術與軟件工程(2016年20期)2016-12-21 11:00:56
計算機教育(2016年10期)2016-12-19 12:15:52
演藝科技(2016年10期)2016-11-26 22:11:21
科學與財富(2016年28期)2016-10-14 04:41:37
科技視界(2016年4期)2016-02-22 19:51:01
