基于Udwadia-Kalaba理論的懸架零部件動態載荷計算方法
2019-06-08 12:44:31胡三寶吳攀王潮
湖南大學學報·自然科學版 2019年4期
胡三寶 吳攀 王潮

摘? ?要:以輪心六分力作為輸入,研究了基于Udwadia-Kalaba理論的懸架零部件動態載荷計算方法.以五連桿后懸架作為建模對象,建立了懸架系統動力學模型,并將系統總約束力進行分解,得到各部件所受動態載荷的解析表達式.與傳統拉格朗日建模方法相比,該方法無需借助拉格朗日乘子,降低了建模復雜程度.為驗證方法的正確性,將數值計算結果與傳統建模軟件Adams/Car仿真結果進行對比,結果表明:該方法準確、高效,計算所得動態載荷與Adams/Car仿真結果均具有較好的吻合性;最后將該方法應用到實車試驗中,進行了某SUV后懸架的動態載荷預測.
關鍵詞:懸架零部件;Udwadia-Kalaba理論;六分力;動態載荷;載荷預測
中圖分類號:TH242? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標志碼:A
A Method for Calculating Dynamic Load of Suspension
Part Based on Udwadia-Kalaba Theory
HU Sanbao1,2,WU Pan1,,WANG Chao1,2
(1.Hubei Key Laboratory of Advanced Technology of Automotive Components,Wuhan University of Technology,Wuhan 430070,China;
2. Hubei Collaborative Center for Automotive Technology,Wuhan 430070,China)
Abstract: Based on Udwadia-Kalaba theory,a method for calculating the dynamic load of suspension part was studied by taking the six-component force of wheel center as the input. Taking the five-rod rear suspension as the modeling object,the dynamic model of the suspension system was established,and the analytical expression of the load at each part was obtained with the decomposition of the total binding force. Compared with the traditional Lagrange modeling method,the method does not need the Lagrange multiplier and reduces the complexity of modeling. In order to verify the correctness of the method,the numerical results were compared with the simulation results of the traditional modeling software Adams/Car. The analysis result shows that the proposed method is accurate and efficient,and the calculated dynamic loads are in good agreement with the Adams/Car simulation results. Finally,the method was applied to the actual vehicle test,and the load prediction for the rear suspension of a SUV was carried out.
Key words: suspension part;Udwadia-Kalaba theory;six-component force;dynamic load;load prediction
汽車懸架的主要功用是傳遞來自車輪的力并承受車身的質量,在懸架的設計開發中,耐久性評價是非常重要的環節,而載荷則是進行懸架零部件耐久性評價的核心基礎,可為懸架的耐久性試驗和評價提供依據[1].
目前為獲取懸架零部件載荷,常用的方法是將實際采集的載荷信號在試驗臺架上迭代出驅動信號,然后通過作動器加載到相應位置來模擬道路試驗[2].伴隨著輪心六分力測量技術的發展成熟,在采集實車道路載荷信號時,可以較為準確地記錄下行駛過程中輪心的6個分力,不必考慮輪胎的復雜非線性特性,從而可以獲得更精確的當量關系.文獻[3]采用4個車輪六分力傳感器、加速度傳感器和應變傳感器,在海南試驗場及周邊實際道路上采集某參考車型整車主要結構動態載荷信號.但這種完全依靠試驗采集結構載荷的方法成本相對比較高,伴隨著計算機技術的快速發展,試驗與仿真相結合已經成為獲取懸架結構載荷的重要研究手段.
文獻[4]建立了副車架與懸架系統的剛柔耦合動力學模型,利用試驗所測的4個車輪的輪心六分力進行加載得到副車架結合部位的載荷時域信號;
文獻[5]建立了客車前后懸架模型,利用輪心六分力作為輸入提取了懸架與車身連接點處的動態載荷;文獻[6]采用多體動力學和有限元聯合仿真的方法,建立整車剛柔耦合動力學模型,將仿真獲得的載荷時間歷程作為隨機載荷譜進行了托舉機構的疲勞壽命分析.文獻[7]建立了整車虛擬樣機,根據真實六分力實現虛擬樣機重現實際道路的過程,獲取了車身及零部件的疲勞載荷.上述試驗與仿真相結合的載荷提取方法,均需依托多體動力學軟件Adams建立相應仿真模型,前期需要進行大量的建模工作,計算結果的正確性高度依賴模型的準確性,對使用者的經驗有較高要求.且Adams在研究動力學問題時是以含拉格朗日乘子的第一類拉氏方程作為內置建模方法[8],但在實際數學建模過程中,拉格朗日乘子不容易確定,需要考慮所有自由度之間的運動關系,建模步驟較為繁瑣.
Udwadia-Kalaba理論是近20年來分析力學領域的一個重要成果,該方法的最大特點是將受約束機械系統的約束關系融入到動力學方程中,在不出現拉格朗日乘子的條件下,探討了理想約束和非理想約束條件下約束力的解析表達式[9],成為分析力學中的一個重要突破.但該理論并未得到太多的關注,其主要應用領域集中在衛星系統的動力學建模及控制中,而在汽車動力學建模領域的應用很少.目前在國內有合肥工業大學應用該理論進行了重型汽車及自動離合器的簡化建模與控制研究[10-11],取得了較好的效果.
本文將Udwadia-Kalaba理論應用到懸架系統建模中,以輪心六分力作為輸入信號,建立五連桿后懸架系統動力學模型,闡述懸架零部件動態載荷的計算方法.
1? ?Udwadia-Kalaba理論
考慮一受約束機械系統,利用Udwadia-Kalaba理論對該系統進行建模,其過程分為3個步驟:
1)在無約束條件下,建立該系統n個自由度的動力學方程,用廣義坐標向量q∈Rn來表示系統n維廣義坐標,則廣義速度、加速度向量為■∈Rn、∈Rn,得到如下方程:
式中:M(q,t)∈Rn×n為系統正定質量(慣性)矩陣;
Q(,q,t)∈Rn為系統廣義力,包括重力、外界輸入力和離心力,此步驟可采用拉格朗日法或牛頓力學法實現.
2)考慮系統內有m個約束,約束方程為:
Ci(,q,t) = 0,i = 1,2,…,m (2)
對上式在時域內求導,得到約束的二階矩陣
形式:
中:A向量.
3)將約束添加到無約束方程中,約束對系統的作用體現在約束力上,于是,含約束的機械系統
Udwadia-Kalaba動力學方程表示為:
式中
Qnic(,q,t) = M1/2(I - D+D)M-1/2c (6)
式中:+代表廣義逆;I為單位矩陣;向量c為補償因子,該方程可由高斯定理、達朗貝爾原理推導得
出[12],結合上式,則得到約束系統的動力學方程:
M(q,t),q,t) + M1/2D+×
(b - AM-1 Q) + M1/2(I - D+D)M-1/2c? (7)
c=0時,即為理想約束系統動力學方程.
2? ?懸架動力學建模
懸架是典型的受約束復雜機械系統,以五連桿后懸架為例,結合Udwadia-Kalaba理論和多體動力學相關理論,進行懸架系統動力學建模.
2.1? ?五連桿后懸架模型
圖1所示為不含輪胎的五連桿后懸架系統簡化模型,模型包括各連桿、減振器、彈簧、車身及輪架,忽略各鉸點處的橡膠襯套,連桿與輪架和車身之間均為球鉸連接.
Fig.1? ?Schematic diagram of five rod rear suspension
圖1中:Ai、Bi為連桿與車身及車輪托架的連接點;C1、C2為減振器彈簧與懸架及車身的連接點;Og - xgygzg為整車坐標系,記為{g};B0為車輪中心點.
在建立系統動力學模型時,做了如下假設和
簡化[13]:
1)將各連桿及輪架均視為剛體,不存在變形,且車身保持固定;
2)減振器和彈簧視為系統力元,建模中不考慮其重力的影響.
為方便后續建模說明,定義各連桿及輪架為剛體i(i=1~6),在各剛體質心處以其慣量主軸為坐標軸建立隨體坐標系{i},并定義以下矢量:
gr Ai:鉸點Ai在坐標系{g}中的位置矢量;
gr Ai,gr Bi:鉸點Ai、Bi在坐標系{i}中的位置矢量;
6r Bi:鉸點Bi在坐標系{6}的位置矢量.
2.2? ?無約束系統動力學建模
根據Udwadia-Kalaba理論建模思想,解除各剛體之間的球鉸約束,利用拉格朗日方程建立系統的動力學方程,其基本形式為:
式中:E為系統的動能;V(g) 為系統重力勢能;F為系統所受廣義主動力.
2.2.1? ?系統的總動能
取整車坐標系{g}作為廣義坐標系,建立剛體i的廣義坐標:
q
式中:
xi = [xi? ?yi? ?zi]T,?漬i = [αi? ?βi? ?γi]T
xi,yi,zi為剛體i質心的廣義坐標;αi,βi,γi為剛體i相對坐標系{g}的廣義姿態角,稱為側傾-橫擺-俯仰角,定義igR為剛體i由坐標系{i}到{g}的旋轉姿態變換矩陣,則有:
igR = Z(γi)Y(βi)X(αi) (9)
Z(γi)、Y(βi)、X(αi)分別為繞z、y、x軸轉動的姿態變換矩陣.
則剛體i的齊次變換矩陣為:
igB = igR? ?xi0? ? ?1 (10)
剛體運動可分解為質量集中在質心的平移運動與繞質心的旋轉運動,因此剛體的動能表示為:
(12)
iJx、iJy、iJz為剛體i在其局部坐標中的轉動慣量;mi為剛體質量,則系統的總動能為:
1及表2分別列出了Mi及ei的各非零元.
式中:θ3 = [0? 0? 1]T;g為重力加速度,則系統所受重力為:
[0? 0? mi? 0? ?0? 0]T (16)
2.2.3? ?系統廣義主動力
以輪心六分力作為輸入,并將彈簧力和阻尼力作為系統廣義主動力,具體計算方法如下:
1)彈簧力
彈簧的下安裝點C1在剛體1局部坐標系{1}中的位置矢量為1r C1,由式(10)將其向廣義坐標系{g}做齊次變換,得到點C1在廣義坐標系中的位置
矢量:
gr C1 = x1 + 1gR1r C1? ? ? ? ? ? ? ? (17)
令彈簧在安裝時的預壓縮量為d0,則任一狀態下彈簧的總變形量為:
Δd = d0 + gr0? ? C1C2 - gr? ? C1C2 (18)
式中:gr0? ? C1C2為初始時刻彈簧上下安裝點的方向向量;gr? ? C1C2為新時刻的方向向量.
根據彈簧的非線性力-位移特性,設在變形量Δd時彈簧剛度系數為k,則彈簧對剛體1的彈性力 為Fs:
Fs = k·Δd·e? ? C2C1 (19)
式中:e? ? C2C1為沿彈簧軸線的單位向量.
2)減振器阻尼力
在懸架運動過程中,由式(17)對時間求導,得到減振器下安裝點C1的速度矢量:
則該速度矢量在減振器軸線方向的分量為:
根據減振器的非線性力-速度特性,令f為減振器在該速度下對應的阻尼系數,則減振器對剛體1產生的阻尼力Fd為:
Fd = -f·vd (22)
因此,剛體1所受廣義主動力為:
同理,對于輪架,輪心點B0在坐標系{g}中的位置矢量為:
gr? ? B0 = x6 + 6gR6r B0 ? ? ?(24)
作用于輪架的輪心六分力分別為F? ? B0、M? ? B0,則輪架所受廣義主動力為:
剛體2、3、4、5均無廣義主動力的作用,則有:
F2 = F3 = F4 = F5 =0 ? ? ?(26)
綜上所述,無約束系統動力學方程為:
2.3? ?系統約束方程
根據五連桿后懸架的運動特性,該系統具有保持車輪上下跳動的自由度,系統共6個活動構件(彈簧及減振器視為系統力元,不計入自由度計算),各構件為球鉸連接,共約束30個自由度,同時減去球鉸引起的連桿繞自身軸線的轉動自由度,共約束5個自由度,則系統的總自由度為1[15],因此系統的約束方程如下.
車身側鉸點Ai(i=1~6)滿足位移約束:
(xi + igRir Ai) - gr Ai = 0 (28)
輪架側鉸點Bi滿足相對位移約束:
(xi + igRir Bi) - (x6 + 6gR6r Bi) = 0 (29)
各連桿滿足自轉約束:
階形式:
2.4? ?系統約束力分解
將約束方程(31)寫成矩陣形式,即可得到如式(3)形式的約束矩陣A∈R35×36和向量b∈R35,結合以上各式,則五連桿懸架系統的動力學方程為:
式(32)為36維二階微分方程組,以輪心六分力作為輸入,求解此方程組即可得到懸架的運動狀態以及任意時刻作用于各剛體廣義坐標上的系統總約束力Qc,對總約束力Qc進行分解,即可得到各鉸點處的載荷.
設鉸點Ai、Bi處的約束力分別為F Ai、F Bi,同時引入比例因子fi,則約束連桿自轉的約束力矩表示為fi(igRir AiBi),于是連桿i所受總約束力iQc表示為:
0fi(igRir AiBi) = iQc,i = 1~5 ? (33)
作用于輪架的總約束力表示為:
將式(33)、(34)寫成矩陣形式:
J(q)F A1F B1f1 = Qc (35)
J(q)∈R36×35為各鉸點的雅克比矩陣,利用最小二乘法即可求得各鉸點處的約束力及連桿的約束力矩比例因子,從而得到各零部件結構載荷.
F A1F B1f1 = (J(q)TJ(q))-1(J(q)TQc) (36)
3? ?數值仿真
以某SUV五連桿后懸架作為建模實例,表3為彈簧非線性力-位移特性及減振器力-速度特性,表4表5分別為該懸架在整車坐標系中各鉸點的位置及各剛體的質量參數.
基于以上參數,在Adams/Car中建立該懸架的多體模型,定義為模型A,在Matlab中建立本文所述動力學模型,定義為模型M.對模型A進行隨機路面的動態仿真,獲取輪心六分力數據,作為模型M的輸入.
以模擬D級隨機路面為例,給定模型M初始條件:q0為模型初始廣義坐標,■0 = 0,仿真步長取0.01 s,時間為10 s,模型M采用龍格-庫塔積分法,求解過程中根據式(18)、式(21)計算彈簧的變形量及減振器速度,并按表3選擇剛度及阻尼系數.兩種模型所得Bi鉸點處的三向動態力的對比結果分別如圖2~圖7所示,同時給出了Bi鉸點X方向動態力的計算誤差,如圖8所示.
由仿真結果可知,兩種模型計算所得動態載荷在變化趨勢上比較吻合,計算誤差基本在5%以內,但部分時刻出現了最大約10%的誤差,這是由于兩種模型的計算初值存在一定差異,以及所采用積分器不同而造成的.
因此,可以證明本文所述載荷計算方法與傳統建模方法取得了相似的效果,且在同樣的仿真步長及仿真時間下,模型A仿真所需時長為6.85 s,模型M為6.6 s,耗時相近,證明該方法準確、高效,有效地克服了傳統建模方法需借助拉格朗日乘子、建模過程復雜的缺點.
4? ?試驗及應用
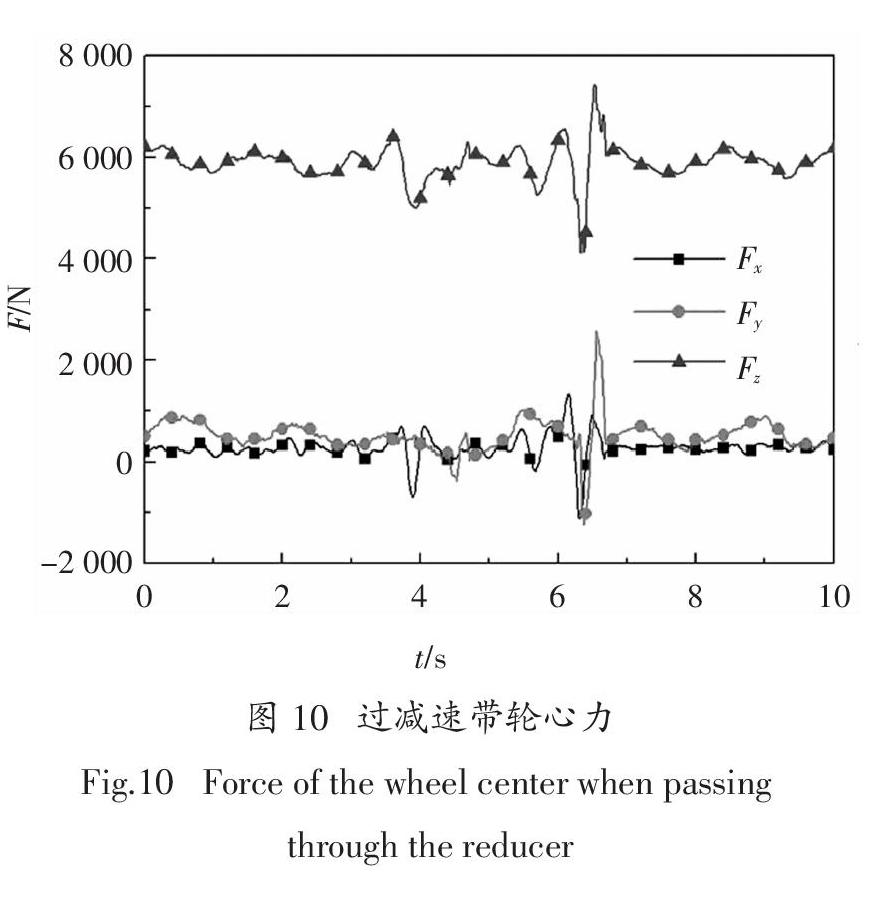
將該方法應用于實車試驗中,通過輪心六分力傳感器和LMS Testlab軟件,獲取在實際道路行駛中該SUV后輪輪心六分力數據,進行后懸架零部件的逆向載荷預測.以汽車低速過減速帶及直行制動兩種工況為例,傳感器的布置如圖9所示,傳感器提取的部分輪心六分力數據如圖10~圖13所示.
過減速帶工況下,試驗所測輪心六分力信號在t = 6.5 s左右的時刻出現了較為明顯的波動,對應于后輪駛過減速帶時懸架的垂向位移變化較大的時刻.直行制動工況下,在t = 5 s左右緊急制動,輪心六分力信號出現明顯波動,以這兩組數據作為
過減速帶工況下,預測所得載荷在t = 6.5 s左右時出現了不同程度的波動,尤其是Z向力幅值變化較大,符合汽車過減速帶時懸架垂向跳動明顯的運動趨勢;直行制動工況下,在制動的時刻同樣出現了較為明顯的載荷波動,說明該方法可應用于實車載荷預測.
5? ?結? ?論
1)將Udwadia-Kalaba理論應用于懸架系統動力學建模中,研究了將輪心六分力進行分解進而獲取懸架零部件動態載荷的計算方法,闡明了方法的原理和建模步驟,并以五連桿后懸架進行實例建模和數值計算,求得各零部件的動態載荷.該方法思路清晰,無需借助拉格朗日乘子,計算結果準確、高
效,對于其他類型的獨立懸架系統同樣適用.
2)將該方法應用于實車道路試驗中,根據實測輪心六分力,預測了過減速帶和直行制動工況下懸架零部件動態載荷,取得了較好的效果,預測所得載荷可用于指導懸架構件的強度、疲勞等問題的
研究.
參考文獻
[1]? ?ENSOR D,COOK C,BIRTLES M. Optimising simulation and test techniques for efficient vehicle durability design and development[C]//2005 The Automotive Research Association of India. Pune:SAE,2005:26—42.
[2]? ? 成永剛,鄭松林,馮金芝,等. 轎車懸架耐久性試驗載荷譜的優化研究[J]. 汽車工程,2009,31(5):467—470.
CHENG Y G,ZHENG S L,FENG J Z,et al. Study on optimization of durability test load spectrum of car suspension[J]. Automobile Engineering,2009,31(5):467—470. (In Chinese)
[3]? ? 卿宏軍,韓旭,陳志夫,等. 某轎車結構載荷譜采集與分析[J]. 湖南大學學報(自然科學版),2012,39(12):32—36.
QING H J,HAN X,CHEN Z F,et al. Collection and analysis of structural load spectrum of a car [J]. Journal of Hunan University(Natural Sciences),2012,39(12):32—36. (In Chinese)
[4]? ? 張少輝,劉俊,劉亞軍. 基于六分力儀提取載荷的某乘用車副車架疲勞分析[J]. 農業裝備與車輛工程,2017,55(6):49—53.
ZHANG S H,LIU J,LIU Y J. Fatigue analysis of the subframe of a passenger vehicle based on the load spectrum extracted by the six-component force Meter[J]. Agricultural Equipment and Vehicle Engineering,2017,55(6):49—53. (In Chinese)
[5]? ?曹建. 某SUV白車身疲勞耐久性分析[D]. 長春: 吉林大學機械科學與工程學院,2016:19—26.
CAO J. Fatigue durability analysis of a SUV white body[D]. Changchun:College of Mechanical Science and Engineering,Jilin University,2016:19—26. (In Chinese)
[6]? ? 谷正氣,臧曉蕾,伍文廣,等. 礦用清障車托舉機構疲勞壽命分析及結構優化[J]. 湖南大學學報(自然科學版),2014,41(2):58—63.
GU Z Q,ZANG X L,WU W G,et al. Fatigue life analysis and structure optimization of lifting mechanism of mine barrier cleaning vehicle [J]. Journal of Hunan University(Natural Sciences),2014,41(2):58—63. (In Chinese)
[7]? ? 李明月,李明山,王金起,等. 基于輪心六分力的載荷分解方法[J]. 計算機輔助工程,2013,22(S1):60—62.
LI M Y,LI M S,WANG J Q,et al. Load decomposition method based on wheel center six-component force[J]. Computer Assistant Engineering,2013,22(S1):60—64. (In Chinese)
[8]? ?李艷軍. 基于FLUENT和ADAMS的導彈分離聯合仿真分析[D]. 哈爾濱:哈爾濱工業大學航天學院,2012:28—38.
LI Y J. Simulation analysis of missile separation based on FLUENT and ADAMS[D]. Harbin:College of Aerospace,Harbin Institute of Technology,2012:28—38. (In Chinese)
[9]? ?ZHAO H,ZHEN S C,CHEN Y H. Dynamic modeling and simulation of multi-body systems using the Udwadia-Kalaba theory [J]. Chinese Journal of Mechanical Engineering,2013,26(5):839—850.
[10]? 黃康,段松林,甄圣超,等. 基于系統約束的重型汽車動力學建模及分析[J]. 中國機械工程,2017,28(4):478—486.
HUANG K,DUAN S L,ZHEN S C,et al. Dynamic modeling and analysis of heavy duty vehicle based on system constraints [J]. China Mechanical Engineering, 2017,28(4): 478—486.(In Chinese)
[11]? 姜建滿. 基于變論域自適應模糊控制和Udwadia-Kalaba理論的自動離合器接合控制研究[D].合肥:合肥工業大學汽車與交通工程學院,2017:65—78.
JIANG J M. Research on automatic clutch combination control based on adaptive fuzzy control of variable range domain and Udwadia- Kalaba theory[D]. Hefei: College of Automotive and Traffic Engineering,Hefei University of Technology,2017:65—78. (In Chinese)
[12]? 趙睿英,焦生杰,王欣. 多手指機器人動力學建模方法[J]. 長安大學學報(自然科學版),2015,35(3):151—158.
ZHAO R Y,JIAO S J,WANG X. Dynamic modeling method of multi-finger robot [J]. Journal of Chang'an University(Natural Sciences),2015,35(3):151—158. (In Chinese)
[13]? 代林. 考慮襯套非線性特性的懸架系統中鉸接點載荷的計算方法及程序開發[D]. 廣州:華南理工大學機械與汽車工程學院,2013:17—21.
DAI L. Calculation method and program development of hinge? ? load in suspension system considering nonlinear characteristics of? ?bushing[D]. Guangzhou: College of Mechanical and Automotive Engineering,South China University of Technology,2013:17—21. (In Chinese)
[14]? WITTBRODT E,ADMIEC-WJCIK I,WOJCIECH S. Dynamics of flexible multibody systems. rigid finite element method[M]. Berlin: Springer-Verlag,2006:23—26.
[15]? 奉銅明. 汽車多連桿懸架的多目標優化與分析[D]. 長沙:湖南大學機械與運載工程學院,2011:9—10.
FENG T M. Multi objective optimization and analysis of automobile multi-link suspension[D]. Changsha:College of Mechanical and Transport Engineering,Hunan University,2011:9—10.(In Chinese)