基于STM32 的新型水下滑翔器姿態調節系統設計
2022-10-19 10:43:08王健曹園山徐令令陳玨
艦船科學技術 2022年17期
關鍵詞:系統
王健,陳 偉,曹園山,徐令令,陳玨
(中國船舶科學研究中心 水動力學國家重點實驗室,江蘇 無錫 214082)
0 引 言
水下滑翔器(underwater glider)是一種新型水下長航程智能航行器,具有續航能力大、噪聲小、成本低等優點。水下滑翔器的姿態調節裝置用于控制水下滑翔器滑翔過程中的姿態和航向,是水下滑翔器關鍵部件之一,其能否可靠正常運行,直接影響水下滑翔器的航向性能與通信性能。目前國內外水下滑翔器的各個控制模塊普遍采用分散式布局方式,各個模塊功能上具有一定的獨立性,如姿態調節系統一般采用智能型驅動器如MSSTB05-R 系列驅動器,其自帶控制核心通過RS485 總線通信的方式接收航行控制器(以下簡稱航控)的指令,且能夠獨立檢測姿態調節的位置。然而采用該種驅動架構和控制方式會帶來2 個方面的問題。
首先是能耗較高。通過對滑翔器的海試運動時歷進行統計得知,水下滑翔器一次500 m 深度潛浮周期約為8 100 s,在此過程中滑翔器通過姿態調節系統進行姿態和航向控制約300 s,姿態調節系統實際驅動電機工作時間只占整個時長的3.7%。采用該種方式驅動,智能驅動器一直處于上電待機狀態,消耗了大量電能。其次是可靠性較低。由于智能驅動器自主檢測限位開關,自主開啟和停止電機。當姿態調節系統由于異常發生宕機時,水下滑翔機航控無法準確實時獲知姿態調節電機的通斷和位置信息。
本文在理論和實踐的基礎上開發設計了基于STM32的新型水下滑翔器姿態調節系統,結合STM32 控制器搭建了全新的軟硬件架構,與舊系統相比,新型姿態調節系統能夠顯著降低功耗并提高了可靠性。
1 系統的總體設計
系統的總體設計框圖如圖1 所示,新型水下滑翔器姿態調節系統主要由控制器、橫傾驅動器、縱傾驅動器、以及位置檢測模塊構成,外部通過RS485 總線與航控進行數據交換。控制器實時解析航控指令,結合限位開關信息對橫傾和縱傾驅動器進行控制,此外航控可以實時獲取姿態調節系統的狀態信息。
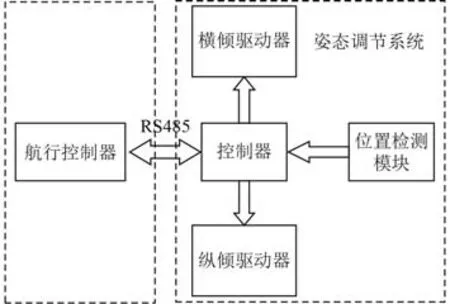
圖1 系統的總體設計框圖Fig.1 Overall design block diagram of the system
2 系統的硬件設計
系統的硬件設計原理圖如圖2 所示,按照具體實現的功能,新型水下滑翔器姿態調節系統主要由主控模塊、通信模塊、位置檢測模塊、驅動器電源控制模塊及信號轉換模塊構成。
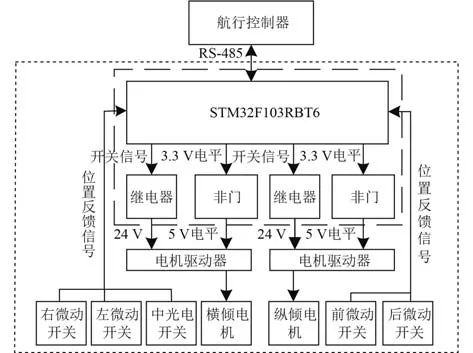
圖2 系統的硬件架構圖Fig.2 Hardware architecture diagram of the system
2.1 主控模塊
新型水下滑翔器姿態調節系統以STM32F103RBT6微處理器為控制核心,該處理器為32 位,主頻最高72 MHz,具有高速嵌入式存儲器(閃存和SRAM 多達128~20 bit),16 MHz 石英晶振,專用3 kHz 振蕩器與RTC 校準,具有睡眠、停止和待機模式,可有效降低功耗。該芯片廣泛應用于各種智能化嵌入式處理方案。新型水下滑翔器姿態調節系統以STM32F103RBT6為控制核心,結合通信模塊、限位模塊、驅動器電源控制模塊、驅動器信號接收模塊完成了系統的硬設計。
2.2 通信模塊
為了與原有的通信方式兼容,控制器仍采用RS485通信的方式與航控通信聯絡,一方面接收來自航控的指令,另一方面將姿態調節系統的位置和繼電器等狀態信息發送給航控。
2.3 位置檢測模塊
位置檢測模塊主要由限位開關和位置檢測電路構成。橫傾電機有左、右、中3 個限位點,縱傾電機有前、后2 個限位點。其中左、右、前、后限位點采用微動式機械限位開關,其為觸點開關,直接接入GPIO口進行檢測,功耗幾乎可以忽略。姿態調節裝置的橫傾中限位采用U 型槽光電開關,其使用DC5V 電源供電,消耗功率為65 MW。為了盡可能降低功耗提高可靠性,本文通過三極管電路控制其電源的通斷,使得電機只在回中運動時該電源才打開。
2.4 驅動器電源控制模塊
繼電器電源控制模塊主要用于控制驅動器的通斷,主要由繼電器和驅動電路構成,與過去的控制方式相比,由于采用分時控制,可以極大降低滑翔器的功耗。新型滑翔器采用非智能型海頓DCM4010 驅動器,單臺待機功耗約0.4 W。一次500 m 深度潛浮周期約為8 100 s 單臺驅動器可以節約大約8.1 W·h 的電能。
2.5 信號轉換模塊
信號轉換模塊電路主要用于將STM32 控制模塊發出的PWM 控制指令進行電平轉換,將TTL 的3.3V 電平信號轉換為驅動器可以接收的5V 電平信號。
3 系統的軟件設計
為了提高水下滑翔器姿態調節裝置的可靠性,降低控制系統的功耗,僅靠硬件設計還不夠,必須有相應的軟件配合。軟件實現上主要分為低功耗管理軟件和故障自診斷復位軟件。
3.1 低功耗管理軟件設計
滑翔器姿態調節系統低功耗管理軟件設計流程圖如圖3 所示。系統軟件是基于C 語言在KEIL 平臺中基于前后臺的編程思路完成的。系統主控制器在上電后一直處于接收狀態,接收來自航控的指令。當收到航控的控制指令后,主控模塊解析該指令,設置驅動器的電機轉動方向,發送一定頻率的控制脈沖,打開橫/縱傾驅動器電源,位置檢測模塊進行相應的檢測,待到位后關閉橫/縱傾驅動器電源。中限位開關只有在回中運動時電源才打開,其余都處于關閉狀態。系統根據姿態改變需要,通過分時控制驅動器電源及中限位開關電源的方式來降低系統的整體功耗。
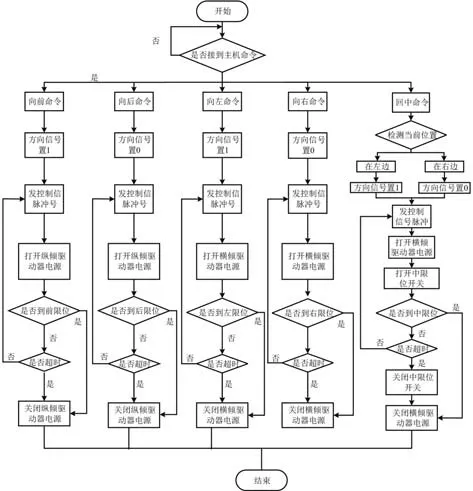
圖3 姿態調節系統低功耗管理軟件設計流程圖Fig.3 low chart of low power management software design for attitude adjustment system
3.2 故障自診斷保護軟件設計
姿態調節裝置一般通過滾珠絲杠等傳動方式實現滑塊的移動,但是這些機構在長時間惡劣海況下工作時,不可避免地會產生機械結構卡頓等異常現象。機械結構卡頓將消耗大量電能,若卡死還會導致電路系統的燒毀。過去的系統架構,主機無法獲知當前姿態調節系統的狀態信息,系統的可靠性較低,為了提高系統的可靠性,新系統需要實時獲取電機的運動狀態,必要時采取相應的保護措施,并發送當前姿態調節的位置狀態給航控進行相應的處理。
當系統由于故障超時斷電處于不確定位置時,系統啟動自診斷保護程序,流程圖如圖4 所示。對于橫傾電機,控制系統會按照從前向后方向進行驅動,對于縱傾電機控制系統會按照左、右、中的方向進行驅動。當電機在運動過程中,控制器的計時器開始記錄當前電機的運動時間,當超過設定的安全時間后,控制器發送斷電信號,然后當前故障點位置信息通過串口發送給航控進行記錄,緊急時采取應急上浮措施,進行回收處理。通過這種故障診斷方式可以提高姿態調節系統的可靠性,對滑翔器整體系統的可靠性提高具有重要意義。
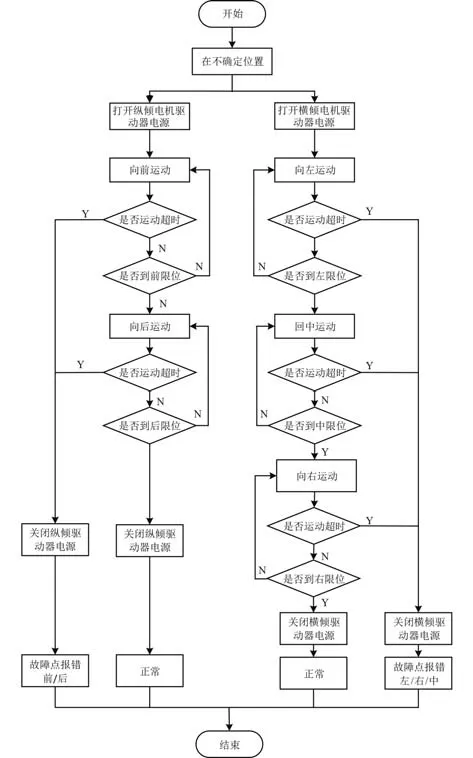
圖4 姿態調節系統故障自診斷復位軟件設計流程圖Fig.4 Design flow chart of self-diagnosis reset software for attitude adjustment system
4 試驗及結果分析
4.1 功耗測試及結果分析
為進一步降低滑翔器的功耗,開發了新型水下滑翔器姿態調節系統應用在正在研發的“海翔系列”水下滑翔器中。為了獲取新型水下滑翔器姿態調節系統的功耗數據,驗證系統的低功耗特性,實際海試前,在岸基測試系統上進行測試。設置試驗參數為3 個潛伏周期,30 m 深度滑翔深度,在滑翔器內部安裝了功耗測試模塊對改進前后姿態調節系統的功耗分別進行記錄,滑翔器姿態調節系統實時功耗對比如圖5 所示,其中滑翔深度為后加擬合線。由對比圖可以看出,改進前姿態調節裝置的工作功耗約為22.8 W,待機功耗7.2 W。改進后姿態調節裝置工作功耗約為16.916 W,待機功耗只有0.5 W 左右。
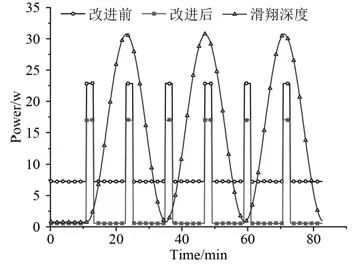
圖5 改進前后一個航次實時功耗對比圖Fig.5 Comparison chart of one voyage real-time power consumption of data before and after improvement
表1 統計了一個航次連續24 天累計共897 次下潛過程中,改進前使用智能型驅動器MSSTB05-R 方案和改進后新型姿態調節裝置在水下滑翔器中使用時的功耗統計值。通過對比改進后的姿態調節裝置功耗值只占改進前的23%,功耗較改進前大幅下降。
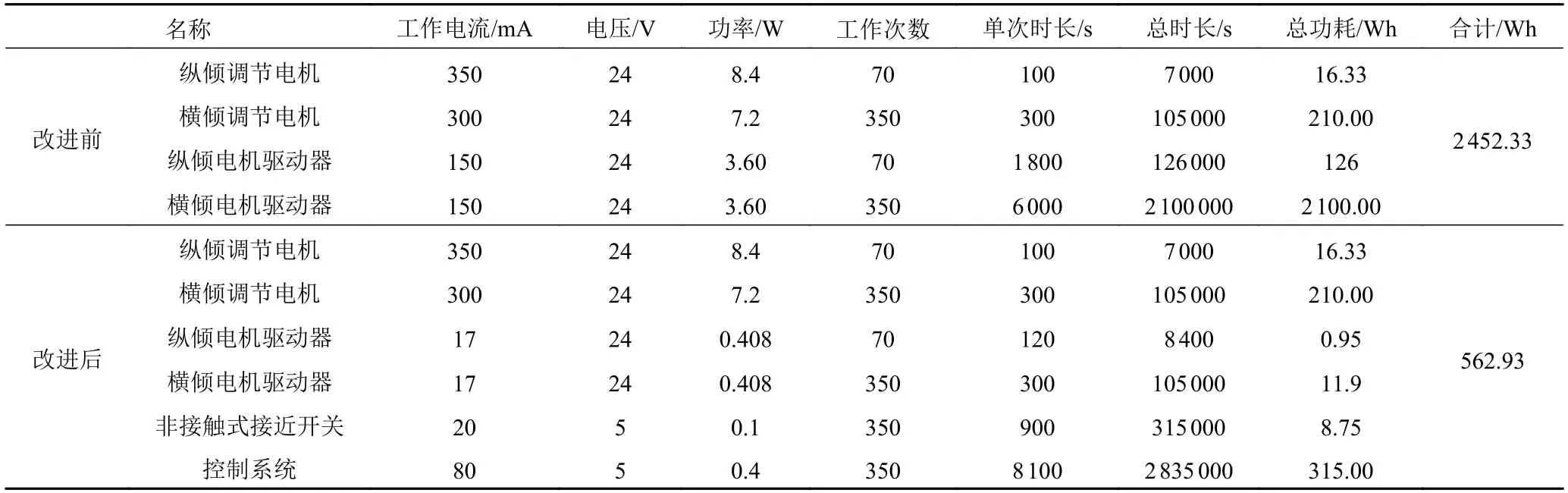
表1 改進前后姿態調節裝置功耗統計表Tab.1 Statistical table of power consumption of adjustment device before and after improvement
4.2 可靠性驗證
可靠性驗證分為陸上傾角測試驗證和海試驗證。陸上測試分為縱傾測試和橫傾測試,縱傾測試時姿態調節系統測試角度從埋首40°至抬首40°變化,橫傾測試時姿態調節角度系統角度從左傾40°至右傾40°變化。陸上傾角測試統計表如表2 所示,姿態調節裝置合計測試次數大于5 000 次,遠大于單次海上航行姿態調節次數,期間沒有出現異常。
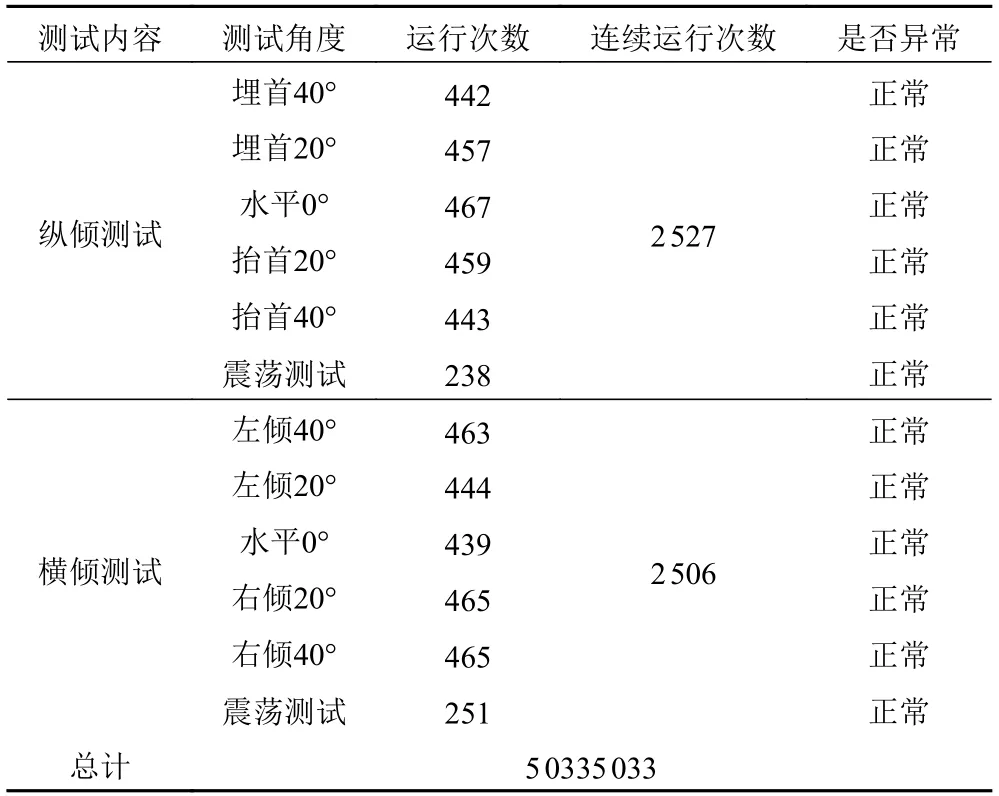
表2 陸上傾角測試統計表Tab.2 Statistics for land dip test
2021 年8 月試驗團隊開展了海翔-500X 型水下滑翔器的南海海試。在海試過程中水下滑翔器必須通過姿態調節裝置進行縱傾角實時干預以使得滑翔角到達合適角度。在整個海南海域的海試中,基于STM32 的新型水下滑翔器姿態調節系統滑翔器姿態調節裝置運行良好,水下滑翔器的各項功能運行正常,未出現任何由于姿態條件裝置異常而產生損壞、失控等問題。圖6 為滑翔器海試測得的縱傾、橫傾以及深度數據。

圖6 海翔-500X 海試深度、縱傾角、橫傾角海試數據Fig.6 Haixiang-500X sea test depth,trim angle and roll angle sea test data
5 結 語
本文基于ARM-STM32 的新型水下滑翔器姿態調節系統,具有功耗低、控制穩定可靠性高的特點,而且系統簡潔、占用空間較小,重量輕,適合水下滑翔器中使用。該系統用于水下滑翔器的設計中,可以靈活地依據水下滑翔器主控制器的要求實現各種姿態的改變。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32