解耦控制仿真實驗設計與解算錯誤規避
2019-06-03 06:52:46付興建關靜麗陳雯柏
實驗室研究與探索 2019年3期
侯 明, 付興建, 關靜麗, 陳雯柏, 柏 森
(北京信息科技大學自動化學院,北京100192)
0 引言
控制理論多采用放大器電子系統進行電學仿真,采用硬件實現,存在本質的不足:靈活性較低,元件數量有限,結構比較固定,構建復雜系統困難;可調元件耐用性有限,3年以后的設備的精度、穩定性降低較多,影響實驗效果。由于電子學系統是一種成本低、能夠嵌入真實系統的技術方法,技術應用價值很大。Matlab是著名的商業數據分析軟件,其高級語言仿真與Simulink的圖形模塊化仿真功能,操作便捷,結果展示優秀,適合簡單與復雜系統的理論設計與驗證。在各行業的系統分析與設計中有大量的應用,近年來在自動控制理論實驗中,逐漸成為一種驗證工具,輔助學生的理論學習[1-2]。根據教學經驗,6個以內運放構成的系統適合電學系統構建,更復雜的結構,運用Simulink軟件更適合教學。
解耦控制是現代控制理論的重要綜合方法之一,是多變量控制系統(Multiple-Input Multiple-Output,MIMO)的經典控制方法,在復雜系統中廣泛應用[3-7]。結合了魯棒性、不確定性、容錯性的高性能解耦控制方法,在智能制造[8]、航空航天[9]、過程控制[10-11]等工業工程領域存在大量示例。而現代控制理論的教學實驗設計中,以理論推導為主,缺少實驗指導。本文以解耦控制為基礎,設計實驗指導,并將MATLAB在實現解耦控制時所遇到問題進行分析,提出解決方案。
實現雙輸入雙輸出系統,一般需要6個運放構建,解耦部分需要再增加4個左右的運放,不宜采用電學系統仿真,采用Simulink仿真是可行的辦法。經過實驗設計與驗證,發現在實現過程中存在一些不易發現的問題,因其誤導性較大,具有普遍性,通過深入的研究分析其原因,提出合理的解決方法。
1 案例設計及仿真結果
給出的雙輸入、雙輸出系統如圖1所示。
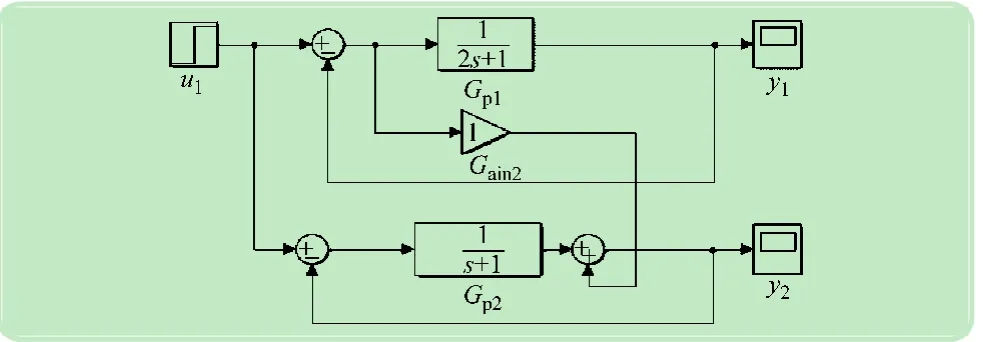
圖1 原始雙輸入雙輸出對象
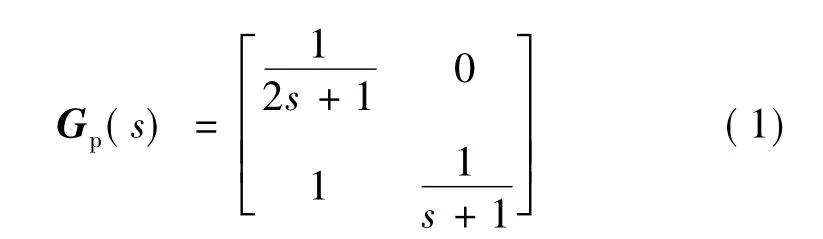
原系統的開環傳遞函數陣為:
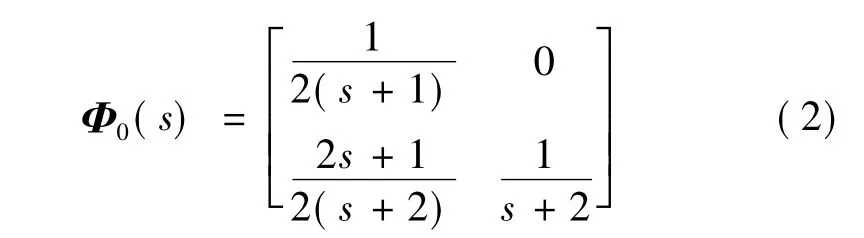
原系統的閉環傳遞函數陣為:
MATALB默認仿真條件,其解算器為Ode45,變步長,原系統的閉環響應曲線如圖2所示。
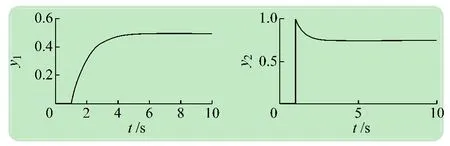
圖2 原始系統y1、y2響應曲線
設計解耦控制器,系統閉環傳遞函數陣為:
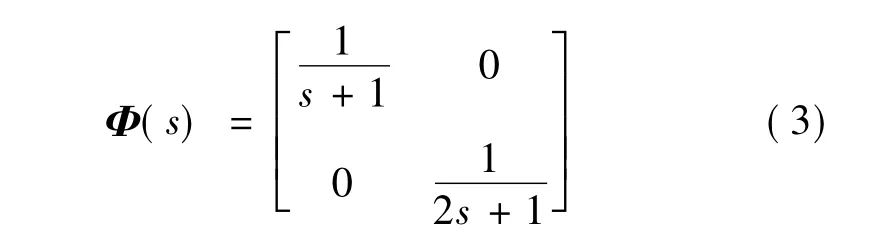
求解串聯解耦控制器[12-13]:
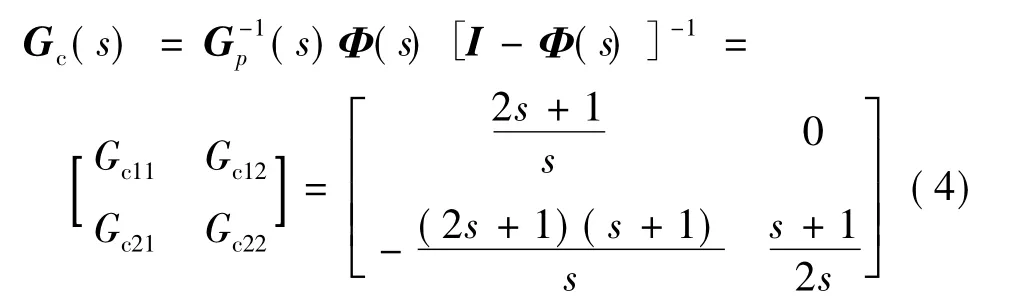
設計其Simulink仿真結構如圖3所示。
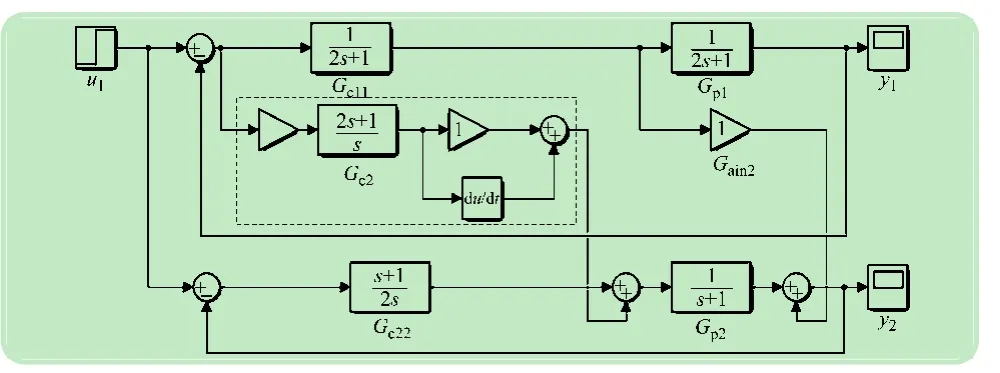
圖3 串聯解耦仿真結構圖
在串聯解耦器后,系統響應如圖4所示。
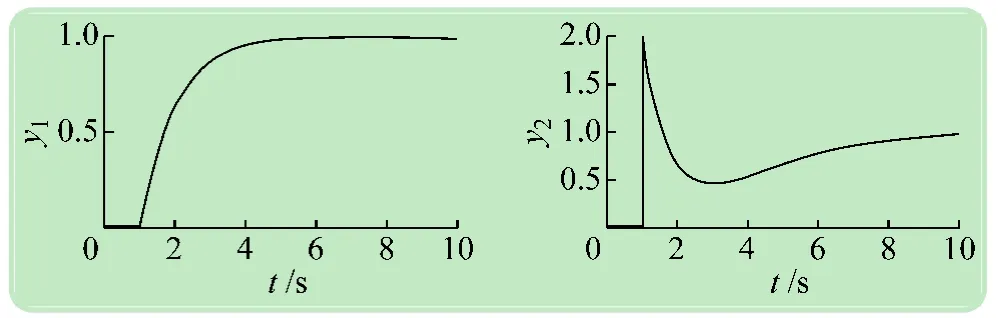
圖4 串聯解耦后y1、y2結果
2 問題的發現
解耦設計目標是將原系統Φ0(s)轉變為Φ(s)。根據式(3),其響應y1、y2理論結果如圖5所示。
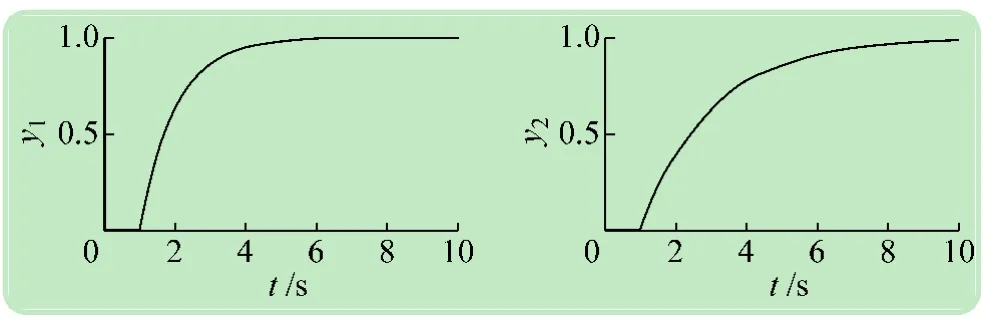
圖5 串聯解耦后y1、y2的理論結果
通過比較可知y1正確,y2響應1~2.5 s的曲線與理論差異很大,2.5 s以后的部分,近似正確。解耦控制設計的模塊結構、參數均是正確的,造成與理論不符的原因是什么?
Simulink以模塊化圖像作為系統構建的操作手段,其系統響應的結果是通過數值方法計算得出的,數值解算方法的階次、初值的獲取方法、激勵源的信號類型等,均有可能是產生錯誤的原因。
Simulink默認的仿真條件為:解算方法為4階龍格庫塔方法,步長為變步長。如果想確定問題的原因,需要對“錯誤”的細節進行觀察。變步長的方法由于步長不易確定,因而不便于定量分析;高階解算方法需要較多的初值,可以采用低階解算方法測試。基于這兩個方向,考慮采用如下步驟進一步分析“錯誤”原因:①將仿真步長條件轉換為定步長。②將靜默認的解算方法轉換為低階解算方法。測試響應結果。
3 測試過程分析
(1) 步長為0.01,解算方法為 Ode3,響應y1、y2見圖6。
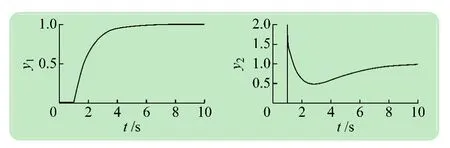
圖6 固定步長,3階龍格庫塔法結果
(2)步長為0.01,解算方法為Ode2,結果見圖7。
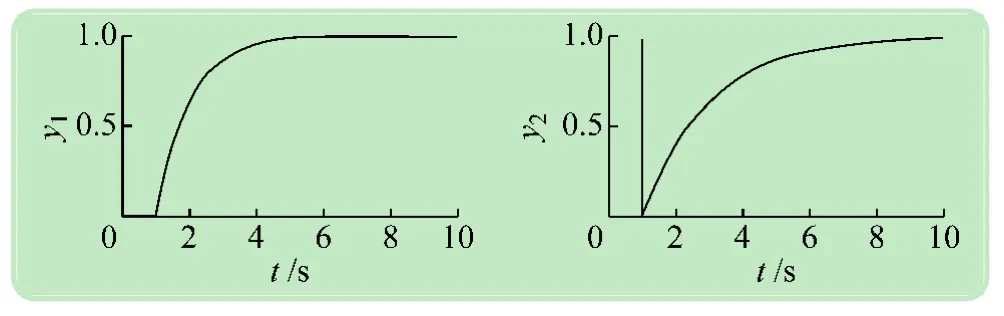
圖7 固定步長,2階龍格庫塔法結果
(3)步長為0.01,解算方法為Ode1,結果見圖8。
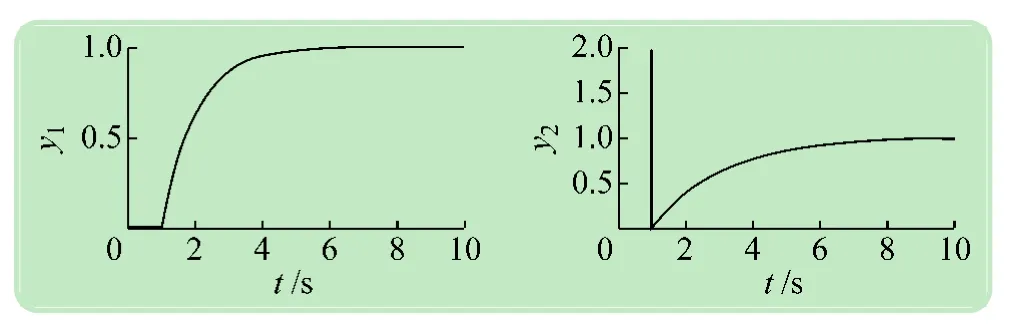
圖8 固定步長,1階龍格庫塔法結果
根據圖4、6~8分析,采用3階以上的解算方法,初始階段y2不正確,采用2階以下的解算方法基本正確,但是在階躍信號的起始瞬間,會產生一個尖刺脈沖,尖刺脈沖的幅值與采用的解算方法有關。通過上面的測試,說明仿真結果的“錯誤”與解算方法有直接關系。下面進一步將時間軸拉開,觀察系統的幾個響應點。
根據圖3,y2的輸出由2部分相加構成:Gain2輸出的耦合信號(記為y21)和Gp2輸出的信號(記為y22),現考察Ode1算法的響應:
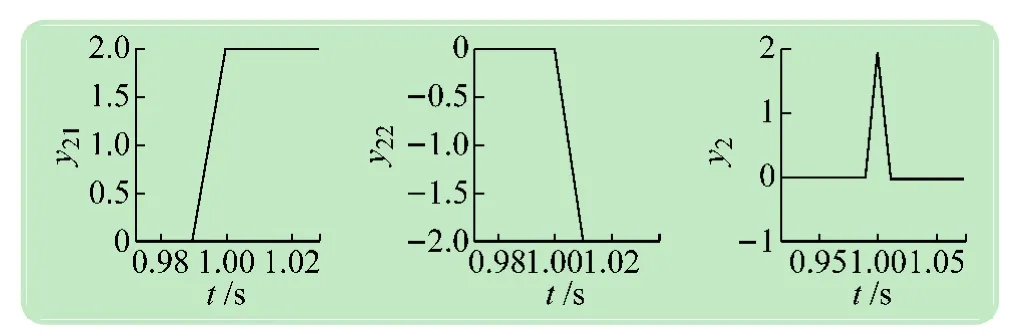
圖 9 Ode1解算中 y21、y22、y2響應
Simulink中設定階躍信號在t=1.00 s時刻產生,y21在前一步(0.99 s)產生計算結果,y22通過Ode1單步法解算,在后一步(1.01 s)產生計算結果,其疊加的效果即為y2。計算方法的步驟差是產生尖刺的原因。在后續的計算中,是數值計算正確的。Ode2的結果如圖10所示。
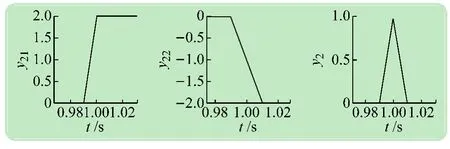
圖 10 Ode2解算中 y21、y22、y2響應
同Ode1比較,y22通過Ode2兩步法解算,從0.99 s開始,在1.01 s產生計算結果,使用2個步長時間,產生尖刺的幅度與Ode1不同。其后續計算數值正確。圖11所示為Ode4的結果。

圖 11 Ode4解算中 y21、y22、y2響應
同 Ode1、Ode2比較,y22通過 Ode4計算,其在 1.01 s的時刻沒有完全抵消y21,留有一個初值。系統Gp2有了一個初始值,使得后續2.5 s之前的數據結果都包含這個初值的響應成分。由于解耦后系統閉環是漸進穩定的,所以初值的響應逐漸建衰減到0[14],總的輸出y2也逐漸趨近于正確的理論結果。
4 系統模塊的沖激響應問題
根據式(4),Gc21的解耦子式的分子部分階次高于分母,不能使用系統模塊構建,其中的比例微分部分構成見圖3,這個子式與圖3系統中的Gp2串聯。下面考察比例微分與系統模塊串聯的仿真的初值問題,構建如下仿真模塊:
圖12中的比例微分與系統環節的順序不一樣,理論上y3、y4的結果應該一樣,在Ode4的高階解算計算下,結果相差較大,如圖13所示。
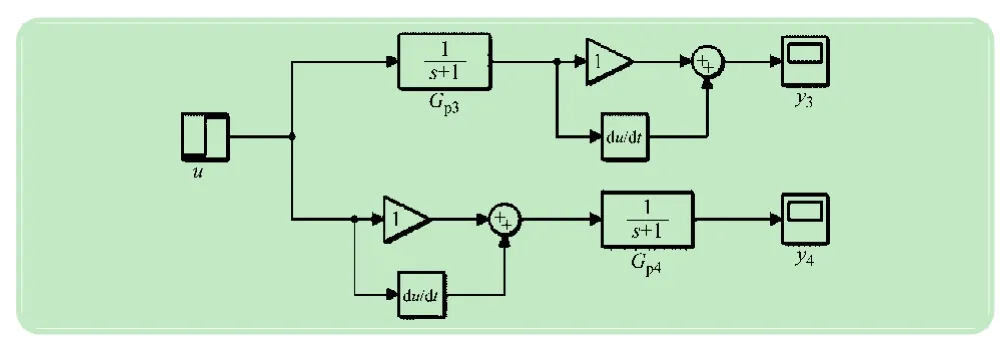
圖12 比例微分與系統模塊串聯
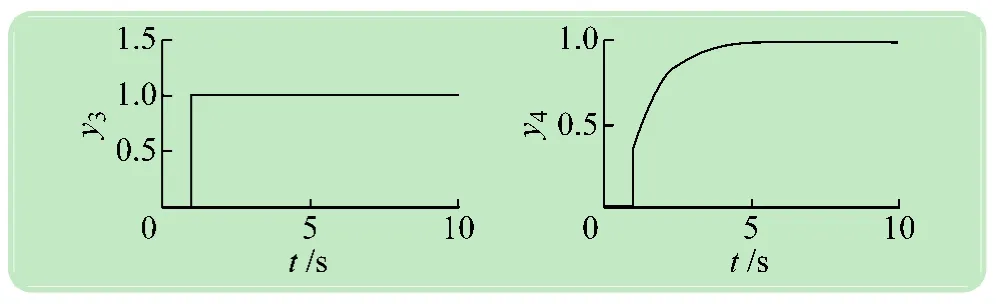
圖13 y3、y4的響應結果
可見,Simulink在處理比例微分模塊與傳遞函數模塊的串聯仿真計算過程中,微分與積分模塊的先后順序影響仿真結果。微分模塊的解算方法是前向差分方程,對階躍信號微分,產生尖刺脈沖,此尖刺脈沖為兩個步長,三角形,幅值為階躍信號的終值/步長。比例微分的輸出為尖刺脈沖與階躍響應的疊加,見圖14所示。
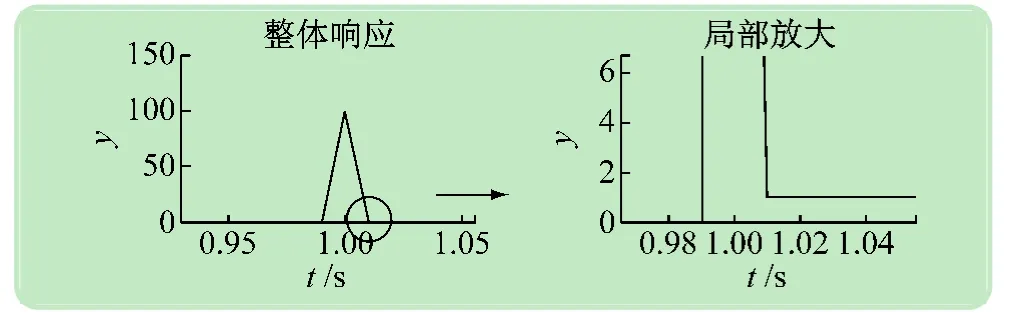
圖14 Simulink中微分環節對階躍響應的作用
尖刺脈沖近似沖激信號[15],根據信號系統理論,沖激響應相當于給系統賦予初值,對于如Gp4所示的漸進穩定系統,其響應具有如下形式:

式中:y為系統響應;U為沖擊能量量;α為系統時間常數;t為時間。
參看圖4中y2的結果,其前2.5 s的響應中主要成分為沖激響應,其后的部分因脈沖響應逐漸衰減到0,主要成分是階躍響應的作用,站在數值計算的角度上看,圖4中y2的響應結果是正確的。高階解算方法(3階以上)在步長之間取值[16],能夠保留沖激信號的響應信息。沖激響應信息是仿真結果不符合理論的原因。
低階解算方法(2階以下)不在步長之間取值,沒有保留沖激的信息。例如采用Ode1方法(見圖9),y21部分在t-1時刻已經賦值,系統模塊響應y22采用Ode1使用t0時刻的數據,計算t1時刻輸出,與y21的響應大小幾乎一致,方向相反,相位差一個步長,因此在系統的總輸出y2中遺留一個峰值為2的尖峰信號。采用Ode2的算法,系統模塊響應y21在t-1時刻開始計算,在t-1到t+1期間產生了一個與y22大小幾乎一致,方向相反,斜率減半的輸出,因此在系統的總輸出y2中遺留可一個峰值為1的尖刺。因此站在數值計算的角度看,低階解算器,由于計算步驟的關系,忽略了沖激響應的對系統的瞬時充能作用,僅對沖激信號進行了濾波,丟失了較多的信息。然而,這個結果如果站在解耦算法設計的角度看,更接近算法設計的理論結果。
5 問題的合理解決方法
解耦控制的教學重點在于其方法的思想與實現過程,不在于解算方法的精度;Simulink的使用精髓也在于其模塊化的便捷性;從上面的角度考慮,如果注重對方法的教學,應當避免數據解算方法細節產生的差異對方法有效性的影響。
采用如下幾種方法規避數值解算的問題,并給出合適的解釋。
(1)采用定步長,不高于2階的解算方法。采用低階解算法,其結果見圖7、8。階躍信號的上跳沿所產生的尖刺,站在濾波的角度看,可以解釋為系統的低通濾波效應對尖峰信號的濾波殘留。
(2)以圖3的基礎,在階躍信號后面串聯一個小慣性環節,降低上升沿的斜率。這樣采用高階解算方法可大幅減低沖激的殘留。圖15所示是在默認的仿真條件下即變步長,Ode45解算結果,慣性時間常數為0.01。

圖15 串聯小慣性環節改善輸出結果
該方法大幅改善了輸出結果,基本準確地反映了解耦控制的結果,響應起始階段仍有初始的計算誤差,通過增大慣性時間常數減小影響。串聯慣性環節可合理的解釋為:真實系統中,不存在嚴格的階躍信號,是具有慣性延遲的。
(3)以圖3的基礎,將比例積分替換為帶有小慣性環節的系統模塊,在變步長,Ode45解算結果見圖16。
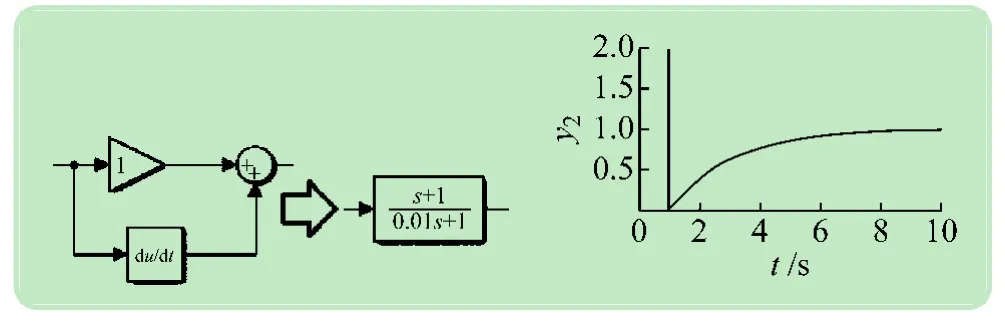
圖16 帶有小慣性的比例微分環節改善輸出結果
該方法較好改善了輸出結果,基本準確地反映了解耦控制的結果,響應起始階段的尖刺,可以解釋為由于引入慣性環節后補償存在很小的延遲,不能將耦合作用完全解除。
(4)將上述3種方法同時使用,如果階躍信號的延遲大于比例微分的延遲,可以獲得更好的效果。
6 解算問題的意義
現代控制理論中,非線性反饋、串聯解耦控制、前饋解耦控制、系統矯正、前饋控制、PID控制等基本控制器設計方法都存在使用比例微分來抵消對象的慣性延遲環節的結構,很容易出現先微分、后積分的串聯形式,并且順序不能調換,教學中容易出現“錯誤”結果誤導學生。產生的原因不易解釋,因此在實際使用中應當注意采用本文所提供的方法避免錯誤結果的出現。
本文所述問題,大部分教材沒有提及,少部分文獻給出了理論原因[12]:求解的控制器部分非真,不具有物理實現性。處理實際應用中,確實可采用小慣性延遲的串接、限制信號的頻帶寬度來近似實現,獲得良好的控制效果。采用串聯小慣性環節具有明確的物理意義,并符合實際應用。限制信號帶寬,是被動的措施,如采用斜坡信號輸入,輸出信號不具有典型性,教學示范作用弱,不易在教學中采用。
7 結語
本文設計的解耦控制仿真方案與解算誤差問題的規避方法在現代控制理論教學中具有良好的示范作用,在進一步研究現代控制系統教學案例中具有重要指導作用。科研人員能注意到此類問題,采用本文提供的方法避免過大誤差,亦可以防止科研結論的錯誤。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
鴨綠江(2021年35期)2021-04-19 12:24:18
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
