稻麥變量施肥機控制系統設計與試驗
2019-05-27 08:44:32戚武振王金星劉雙喜王玉亮趙庚星
農機化研究 2019年8期
戚武振,王金星,b,劉雙喜,b, 王玉亮,b,王 震,趙庚星
(山東農業大學 a.山東省園藝機械與裝備重點實驗室;b.機械與電子工程學院;c.資源與環境學院,山東 泰安 271018)
0 引言
精準施肥是精細農業中的關鍵環節。傳統施肥方式習慣在種植區大面積施用相同類型和劑量的肥料,不僅會造成燒種、燒苗和肥料浪費,還會產生一系列環境污染問題。因此,應根據不同地塊、不同土壤和不同作物生長環境的需要,采取變量施肥。變量施肥技術根據小尺度田塊之間的地力和作物長勢差異,施以不同數量和配比的肥料,從而減少施肥量,提高肥料利用率[1]。
20世紀90年代以來,變量施肥技術在歐美發達國家發展很快,已經商品化的有美國John Deere公司的變量撒肥機、Case公司的Flexi Soil變量施肥播種機等[2-3]。國內于20世紀90年代后期開始對變量施肥技術進行關注和引入。近年來,國內在變量施肥技術的示范研究方面發展速度較快。吉林大學研制了以步進電機為驅動、基于IC卡的手動/自動變量施肥機;上海交通大學研制了基于GPRS的變量施肥機;黑龍江八一農墾大學采用電控機械無級變速器為執行機構研制出大豆精密播種施肥機。然而,國內外研制的變量施肥機大多采用RS232總線,導致系統接線繁雜,各個模塊的通用不強、可靠性和兼容性差,且沒有形成成熟的肥料施入控制技術體系和商業化的產品[4-7]。為此,針對國內稻麥變量施肥機械存在的問題,圍繞施肥變量控制,主要從機械結構、施肥模型建立和上、下位機程序設計開發等方面進行研究,完成了基于CAN總線通訊的稻麥變量施肥機控制系統設計,為我國智能化稻麥變量施肥機的設計、生產提供了技術和數據支撐。
1 控制系統總體設計與工作原理
控制系統采用網絡服務器、車載工控機和各下位機節點三級分布式結構,系統總體結構如圖1所示。

圖1 控制系統總體結構
其中,網絡服務器內部包含變量施肥專家決策系統和處方圖管理系統,網絡服務器通過GPRS模塊與車載工控機通訊,為車載工控機提供處方圖和施肥決策實時下載服務。車載工控機由一臺索奇T1510工業控制機組成,搭載由Visual Studio 2010編寫的上位機界面程序和GIS系統。系統工作時,車載工控機從網絡服務器下載當前作業地塊的變量施肥處方圖和變量施肥專家決策,并通過CAN總線通訊模塊獲取GPS定位、機具行進速度等下位機節點信息,結合處方圖和變量施肥模型,計算當前位置施肥量,進而控制步進電機轉動,通過改變外槽輪排肥器中外槽輪開度,進行變量施肥作業。
2 系統硬件設計
硬件部分主要包括機械執行機構、外槽輪開度檢測系統及排肥軸轉速檢測系統3個部分。
2.1 機械執行機構設計
機械執行機構以普菲德86BYG250B步進電機作為動力,通過傳動機構帶動排肥軸做軸向運動,進而改變外槽輪開度。機械執行機構結構如圖2所示。其中,關鍵部件包括傳動機構、絲杠—排肥軸連接機構和花鍵副。絲杠—排肥軸連接機構如圖3所示。

1.肥料箱 2.機架 3.位移傳感器 4.傳動機構 5.步進電機 6.絲杠—排肥軸連接機構 7.外槽輪排肥器 8.霍爾傳感器 9.條型磁鋼 10.排肥軸 11.花鍵副


1.外殼 2.墊圈 3.排肥軸端推力軸承 4.排肥軸連接端 5.絲杠端推力軸承 6.端蓋 7.絲杠連接端
圖3中,通過兩個推力軸承將絲杠和排肥軸連接在一起,使得兩部分轉動互不影響。同時,可以通過絲杠端對排肥軸施加軸向力,達到調節外槽輪開度的目的。排肥軸另一端通過花鍵副和軸承座固定在機架上,減小了排肥軸軸向運動的阻力,提高整個機構的靈活性[8-11]。
機械執行機構的傳動過程為:單片機發出控制指令驅動步進電機轉動,經過蝸桿傳動和螺旋傳動,最終控制絲杠實現軸向移動,進而調節外槽輪開度。本文所用STC89C52RC單片機的晶振頻率為11.059 2MHz,則時鐘周期為1/11.059 2MHz,約為90ns。每12個時鐘周期為1個機器周期,故1個機器周期約為1μs。在步進電機控制程序中,采用以自增語句為主體的延時程序作為脈沖高低電平之間的時間間隔,執行自增語句所用時間為1個機器周期(即1μs),通過調節延時長短即可調節步進電機轉速。為使步進電機運行平穩舒適,調整步進電機細分為每轉3 600個脈沖,設定延時為30個機器周期,則控制步進電機轉動的脈沖周期為60μs,則步進電機轉速vf為

(1)
式中T—單片機輸出的脈沖周期;
N—步進電機轉動1圈所需要的脈沖數。
根據蝸桿傳動和螺旋傳動的特點,可得絲杠軸向運動速度vs為
vs=vf·I·P
(2)
式中I—蝸桿傳動的傳動比;
P—絲杠螺距。
本文選用的蝸桿傳動比為1:8,絲杠螺距為4mm。帶入數據,得外槽輪開度調節速度為2.31mm/s。外槽輪開度的調節范圍為0~50mm,為便于控制,將調節行程分為17個擋位,每3mm為1個擋位進行變量調節,調節1個擋位用時1.3s,響應迅速,近似于無極變量調節。
2.2 排肥軸轉速檢測系統設計
變量作業時只對外槽輪開度進行實時調節,外槽輪轉動由地輪帶動。外槽輪轉速受地輪滑移率等因素影響,地輪滑移率又受到播種施肥機的質量、地輪直徑、地輪寬度、農田平整程度和土壤屬性等因素影響。由于影響因素較多,外槽輪轉速不易通過計算獲得,因此本文通過排肥軸轉速檢測系統實時測得外槽輪轉速。
排肥軸轉速檢測系統采用霍爾傳感器,配合條形磁鋼作為脈沖發生器,如圖4所示。在排肥軸表面,沿徑向方向每隔120°設置條形磁鋼,排肥軸轉動時,條形磁鋼經過霍爾傳感器探頭引發磁場變化,進而產生脈沖;單片機通過外部中斷接收脈沖信息配合定時器功能計算出排肥軸轉速[12]。因排肥軸在轉動過程中會產生軸向運動,將磁鋼做成條形,即使排肥軸發生軸向移動,磁鋼仍在霍爾傳感器檢測范圍內。

圖4 轉速傳感器安裝示意
2.3 外槽輪開度檢測系統設計
考慮到田間工作環境下揚塵和振動劇烈等惡劣情況,開度檢測系統采用電位器式位移傳感器進行檢測。相比于紅外測距傳感器、超聲波測距傳感器等非接觸式傳感器,電位器式位移傳感器能夠減少由灰塵遮擋、機械振動等情況產生的誤差,實現精確測量[13]。圖2中,電位器式位移傳感器固定端固定在肥料箱上,可伸縮的拉桿一端通過連接件固定在傳動機構的絲杠上,隨絲杠做軸向運動,進而間接檢測外槽輪的軸向移動情況。
3 系統軟件設計
3.1 排肥量數學模型建立
(3)
式中q—外槽輪轉動一周轉排肥量(g/r);
vn—外槽輪轉速(r/s);
z—外槽輪排肥器個數;
w—機具作業幅寬(m);
v—機具前進速度(m/s)。
根據文獻[15],外槽輪轉動1周的排肥量為[15]
(4)
式中D—外槽輪直徑(mm);
L—外槽輪開度(mm);
γ—肥料容重(g/mm3);
在小學數學教學體系中,計算部分的知識內容是極其關鍵的,同時亦是小學數學課堂的教學難點所在。在實際教學當中,數學教師在講授這部分知識內容時往往是大費周章,而學生卻會感覺這部分知識內容毫無生趣。這就要求小學數學教師必須注重對教輔工具的開發,以便能夠讓學生在學習時不會產生厭煩感和抵觸情緒。以多媒體計算為代表的信息計算手段恰好可以滿足小學數學教師的需要,原因在于多媒體計算有著豐富的音頻、視頻功能,不但能夠更為直觀地展示教學內容,同時對小學生的吸引力也是不言而喻的。
α(vn)—肥料對凹槽的充滿系數,與轉速有關;
f—凹槽端面積(mm2);
t—槽齒間節距(mm);
C(vn)—帶動層特性系數,與轉速有關。
由公式(4)可以看出:在外槽輪排肥器制作材料、外形尺寸及肥料種類一定的情況下,排肥器的排肥量只與外槽輪開度和轉速有關[15]。利用圖5所示的試驗臺,設計試驗對排肥器排肥量進行標定,并通過MatLab數據處理,將方程(4)簡化為單圈排肥量關于外槽輪開度和轉速兩個變量的數學模型,應用到方程(3)中。

1.肥料箱 2.支架 3.外槽輪排肥器 4.導肥管 5.集肥箱 6.滑動導軌 7.步進電機底座 8.步進電機
標定試驗采用稻麥基肥常用的尿素作為試驗肥料,肥料粒徑1.0~4.75mm占90%以上,容重0.1~0.35g/cm3。標定時,采用步進電機調節外槽輪轉速,通過帶有刻度的滑動導軌調節外槽輪開度。分別設置不同的轉速和開度,收集20s內排出的肥料,稱重并計算外槽輪單圈排肥量。計算公式為
(5)
式中G—20s內排出的肥料(g)。
排肥器單圈排肥量標定數據數據如表1所示。

表1 排肥器單圈排肥量標定數據
以外槽輪開度和轉速為自變量、外槽輪單圈排肥量為因變量,利用MatLab對數據進行多形式逼近,擬合方程為
q=2.076+2.02L-1.774vn-0.004333L2-
(6)
擬合方程確定系數達到0.997 3,擬合度較高,能夠表示外槽輪單圈排肥量和開度、轉速的關系。將方程(6)帶入方程(3),并利用MatLab對L求解,得到外槽輪排肥器開度關于轉速等其他變量的關系式為
L=f(Q,vn,z,w,v)
(7)
其中,變量w和z都是已知,只需在施肥作業時實時檢測外槽輪轉速vn、機具行進速度v,并通過GIS和專家決策系統獲取排肥器在當前地塊區域的需肥量Q,即可求出預期外槽輪開度,進而通過控制步進電機執行相應的動作。
3.2 CAN總線通訊系統設計
CAN總線通訊系統主要分為一個上位機節點和4個下位機節點。上位機節點為車載工控機節點,下位機節點包括排肥軸轉速檢測節點、位移傳感器節點、GPS定位節點和步進電機控制節點。車載工控機節點通過USB轉CAN模塊,實現車載工控機USB總線和CAN總線的數據交互。下位機節點采用STC89C52RC單片機作為核心控制單元,配合CAN接口電路,實現與車載工控機實時通信。各下位機節點電路結構大同小異,圖6中以位移傳感器節點為例進行說明[16]。
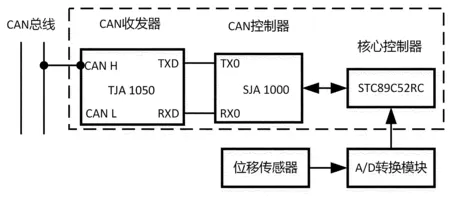
圖6 CAN總線位移傳感器節點
CAN總線通訊協議中采用標準數據幀和標準遠程幀兩種報文,報文格式如圖7所示。仲裁字段中包含11位ID號(也稱識別符),用來區別各組成節點并配置各節點優先級。數據幀包含64位數據字段,用來存儲需要發送的數據,遠程幀用來發送請求命令,不用傳輸數據,沒有數據字段。各節點之間通過標準數據幀傳遞數據,車載工控機節點通過標準遠程幀向各下位機節點請求反饋數據。根據CAN總線通訊的特點,各組成節點不分主從,最先訪問總線的節點獲得發送權[17]。如果多個節點同時訪問總線,則通過仲裁機制,判定報文ID號小的節點優先發送,其他節點暫時退出總線。因此,控制系統將車載工控機節點設置為最高優先級,ID號后8位為0x01。根據控制要求,各下位機節點優先級由高到低依次為排肥軸轉速檢測節點、位移傳感器節點、GPS定位節點和步進電機控制節點。

圖7 報文格式
3.3 上位機軟件程序設計
上位機即車載工控機軟件程序采用Visual studio 2010編寫,主要包含人機交互界面程序和GIS系統。該軟件主要負責采集GPS、轉速傳感器等各下位機節點信息,計算變量施肥需要調節的開度,將調節指令發送給步進電機節點[18-21]。軟件界面如圖8所示,程序流程如圖9所示。
田間作業開啟系統后,首先進入地塊管理界面,通過GPRS訪問網絡服務器下載當前地塊的施肥處方圖和專家施肥決策;其次,系統通過CAN總線,給GPS節點發送遠程幀,向GPS節點請求定位信息;收到位置信息后,通過GIS系統獲得當前位置施肥量信息;最后,系統向各下位機節點發送遠程幀請求外槽輪轉速、機具行進速度等信息,收到反饋數據后,帶入公式(7)得到外槽輪開度。系統將計算出的外槽輪開度換算成擋位信息,并將擋位信息通過CAN總線傳遞給步進電機節點。步進電機節點為閉環控制,控制流程如圖10所示。首先,進行系統初始化,使外槽輪開度調節到初始位置;步進電機節點核心控制單元通過CAN總線向上位機發送指令,請求下一次擋位數據;步進電機節點每次收到擋位信息,都和前一次擋位信息進行比對,根據對比情況,執行相應動作[22-24]。

圖8 上位機軟件界面
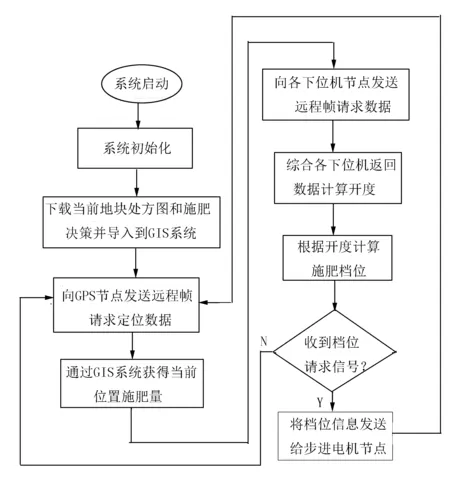
圖9 上位機軟件工作流程圖

圖10 下位機工作流程圖
4 試驗
為檢測上位機軟件的運行穩定性和可靠性、各信息采集節點的可靠性、變量施肥機構的響應速度和響應準確度、CAN總線通訊的實時性與可靠性,進行變量施肥田間試驗,試驗現場如圖11所示。
4.1 試驗條件
2017年11月6號,試驗在山東省淄博市桓臺縣荊家鎮荊四村試驗田進行(坐標:北緯N37°03′74.62″,東經E117°99′57.79″)。試驗地塊長300m,寬100m,地勢平坦,前茬作物為玉米,秸稈經過還田機粉碎還田。試驗設備主要包括:稻麥免耕播種變量施肥機;東方紅—LX1254拖拉機(其上搭載GPS導航設備),動力輸出軸轉速為720r/min;高精度電子天平,精度為0.01g;采用稻麥基肥常用的尿素作為試驗肥料,肥料粒徑1.0~4.75mm占90%以上;塑料桶和皮卷尺等。

圖11 田間試驗
4.2 試驗方法
首先進行靜態試驗,對排肥器排肥精度和各行之間排肥量變異系數進行測定。試驗時,農機具不進地,利用液壓系統將農機具提升,人力轉動地輪。設定施肥擋位為第10擋,轉動地輪40圈,分別用塑料桶接取單個導肥管通過的肥料并稱量,共進行8組試驗并記錄數據。
靜態試驗完成后,進行田間試驗。啟動變量施肥控制系統,將當前地塊施肥處方圖導入GIS系統。開始變量施肥作業后,拖拉機以時速6.8kmn/h行進;通過后臺運行MySQL數據庫服務,每隔1s記錄1組變量施肥實時狀態數據,實時狀態數據包括當前坐標位置、機具行進速度、當前位置需肥量、實時施肥量、實時施肥擋位、排肥軸轉速及外槽輪開度等信息。
4.3 試驗結果與分析
靜態試驗數據如表2所示。由表2可知:各行排肥器中,排肥量變異系數最大為1.78%,符合各行排肥量之間變異系數小于5%的設計要求。
取田間試驗時MySQL數據庫記錄的部分數據進行分析,任取其中255個采樣點(即時長為255s)的工作狀態實時數據,包括行進速度、排肥軸轉速、實際施肥開度等信息,帶入公式(7),求出實時施肥量,并和需肥量進行對比,對比結果如圖12所示。

表2 各行變異系數
由圖12中可知:實時施肥量沿需肥量變化趨勢成階梯狀變化,出現這種階梯變化是施肥擋位換擋導致的;同一施肥擋位施肥過程中施肥量基本穩定。將施肥過程按照不同施肥檔位劃分施肥階段,分別對不同施肥階段內的施肥量進行積分,積分函數為

(8)
式中G積—某施肥擋位階段內施肥量積分;
n—某施肥擋位持續的施肥點個數;
xi—第i個施肥點;
yi—第i個施肥點的施肥量或需肥量。
積分結果如表3所示。由表3可以看出:施肥相對誤差最大為2.57%,變量施肥精準度達到97%以上,符合變量施肥設計要求。田間試驗過程中,上位機軟件運行穩定可靠,各下位機節點工作穩定,數據采集精確、及時,CAN總線通訊快速、穩定,開度調節機構響應迅速、定位準確。
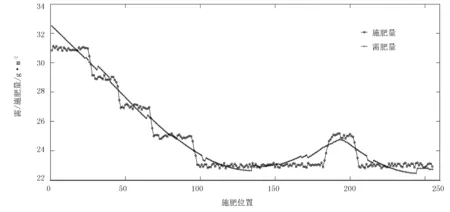
圖12 需肥量和實時施肥量對比Fig.12 Comparison of the amount of fertilizer requirement and the amount of real time fertilizer

表3 各施肥階段誤差情況
5 結論
1)設計了一種稻麥變量施肥機控制系統,通過GPS模塊采集位置信息,結合施肥處方圖,獲得當前位置需肥量。通過標定、推導得出變量施肥模型,控制步進電機實時調節外槽輪開度,實現定點定量、按需施肥。
2)以CAN總線通訊作為現場總線,實現各節點之間的實時通信。各節點都由單獨的單片機控制,實現了模塊化,便于功能的擴展和完善。機械結構響應迅速,結構簡單,成本低,便于生產和推廣。
3)田間試驗結果表明:該系統工作穩定,作業準確,各行排肥器之間變異系數小于5%,變量施肥精度達97%以上,各項技術指標滿足農藝要求。
