電動輪卡車稱重系統淺析
2019-05-23 08:06:44黃勇
銅業工程 2019年2期
黃 勇
(江西銅業集團有限公司 德興銅礦,江西 德興 334224)
1 引言
江西省德興銅礦作為江西銅業股份有限公司的主干礦山,具有儲量大、礦體埋藏深、礦石可選性好、綜合利用組分多等特點,是我國重點銅礦之一。礦山的開采使用的是露天方式,主要依靠電動輪卡車將廢石和礦石分別運輸到排土場和礦石破碎站。電動輪卡車作業時運輸量非常大,傳統的稱重方式并不能準確的進行測量且很不方便,因此電動輪卡車車載式稱重系統對準確測量卡車運輸量,為生產調度及運輸成本管理提供參考,具有十分重要的意義。
2 主要部件介紹
電動輪卡車稱重系統主要包括安裝在4個懸掛上的懸掛壓力傳感器、測量傾斜角度的水平傾斜儀、系統數據分析模塊及通信端口、操作顯示器和其他部分[1-3]。圖1為730E電動輪卡車稱重系統各部件組成。
2.1 懸掛壓力傳感器
懸掛壓力傳感器共有4個,分別安裝在卡車的4根懸掛上,用于測量不同裝載情況下4個懸掛當前的壓力值,通過壓力轉換為電信號,然后將電信號傳輸至稱重系統模塊進行計算,得出當前載重量。我們使用的傳感器是一個兩線的壓力傳感器,壓力傳感器的測量范圍是0~4000psi。傳感器的一根導線是提供電源電壓,該電壓為稱重系統模塊提供+18V電源電壓,另一根導線為18V電源電壓經過傳感器后返回稱重系統模塊的反饋電壓信號。

圖1 730E電動輪卡車稱重系統
2.2 水平傾斜儀
水平傾斜儀用于提高車身傾斜或車輛處于坡度時載重量計算精度。傳感器有3根導線,一根是電源線,也是來自于稱重系統模塊的+18V電源,一根是地線,還有一根線為反饋信號線。反饋信號電壓是1V至4V之間的電壓,零度水平的傾斜信號電壓為2.6V,傾斜角度與傾斜信號電壓為線性變化,即傾斜角度每上仰1°,信號線電壓則下降0.103V。
2.3 稱重系統模塊及通信端口
稱重模塊是整個電動輪稱重系統的核心部分,也就是整個系統的大腦,它的主要工作是負責將輸入的各個信號進行計算整理得出卡車在工作過程中的裝載情況及各項裝載數據并進行輸出。其中輸入的信號除以上介紹的懸掛壓力信號和水平傾斜儀信號外,還有翻斗舉升的接近開關信號、裝載制動開關信號、GE系統提供的車輛運行速度信號。
通信端口包括2個RS232通信串口和2個CAN端口。2個串口通信主要是用于模塊與車載顯示器之間的通信以及手提電腦與稱重模塊的連接。CAN端口主要負責稱重數據與卡調系統及GE系統之間的通信。
2.4 駕駛室操作顯示器及操作開關
操作顯示器一般為一個顯示運行速度和噸位的表頭,也可采用中央顯示器的形式進行顯示及操作。速度表顯示的為從左馬達速度傳感器得到的車輛運行速度信號,可以通過改變速度表背后的接地端子的接線方式,來顯示的速度單位為英里每小時或公里每小時。噸位表平時顯示的就是模塊計算出來的當前載重量,同時通過轉換開關可以在這里查看當前的各個懸掛壓力值、水平傾斜度、總的噸位及駕駛員ID。
2.5 其他部分
構成操作系統部件除以上介紹的外,還有駕駛員操作的裝載制動開關、檢測翻斗舉升卸載后已完全落到大梁上的接近開關、電動輪車平臺兩側的裝載量指示燈。裝載制動開關給稱重系統提供裝車信號,接近開關給稱重系統提供舉升卸車信號。稱重指示燈包括安裝在平臺左右兩邊的2組燈,每組有紅黃綠3種顏色的燈各1個。稱重指示燈通過不同顏色的燈光點亮情況顯示當前卡車裝載情況,電鏟駕駛員可以通過稱重指示燈的閃亮情況來判斷裝載情況,從而提高裝車質量。
3 稱重系統工作狀態
稱重系統的工作狀態按照車斗裝載情況來分主要包括空車、裝車、重車、卸車四個狀態。
3.1 空車狀態
當車斗內裝載量為0時,稱重系統處于空車狀態,此時噸位顯示為0。稱重系統的空車狀態包括空車靜止和空車運行兩種情況。空車靜止時,車輛4根懸掛所承受的壓力不會發生變化,均來自于車身的自重;空車運行時,懸掛承受的壓力除車身自重外,還有車輛在運行過程中帶來的沖擊,是處于一定范圍內的變化中的。這兩種情況下稱重系統顯示的載重噸位都是0,但這兩種情況下懸掛的壓力是不一樣的,因此,稱重系統的0值需要一個計算過程來得到,這個過程我們稱之為校正皮重。
校正皮重是稱重系統處于空車狀態下的一項功能,因此對電動輪進行校正皮重操作前,要確保車斗內沒有物體,才能得到準確的0值。然后空車以正常的速度運行幾分鐘,讓系統獲取空車運行過程中懸掛壓力的變化數據,最后停穩車輛,系統對這些數據進行計算分析,得出最終的載重0值。
3.2 裝車狀態
當電動輪卡車來到電鏟或其它裝載機械下進行裝載,電動輪駕駛員按下裝載制動開關,裝載制動投入,稱重系統接收到來自裝載制動開關的動作信號,稱重系統進入裝載狀態。裝載制動與停車制動不同,裝載制動僅抱住后輪的剎車盤,車身還會有輕微的擺動。因此,裝載是可以利用這種特性消除部分裝載過程中車身收到的裝載沖擊,起到保護電動輪卡車懸掛的作用。裝載過程中,稱重系統會根據裝載情況對懸掛壓力變化值進行計算,得出當前的載重量,然后通過裝載指示燈顯示告知電鏟駕駛員,起到提高裝車質量的作用。
3.3 重車狀態
重車狀態就是車斗滿載時的狀態。裝車完成時,系統會計算出一個大概的當前噸位數值,并顯示在噸位表上,但由于地面不水平以及裝載往一邊傾斜等因素,此時的噸位值并不準確。這時候系統需要電動輪卡車在運行過程中懸掛壓力變化的范圍來進行一個精度計算,類似于空車狀態下0值的計算過程,卡車重車運行一段距離后,計算完成,得出最終的載重量數值,這個過程稱之為動態稱重。
3.4 卸車狀態
卸車狀態是電動輪卡車稱重過程的最后一個狀態。卡車將裝載的礦石/廢石運輸到破碎站/排土場,翻斗舉起將礦石/廢石卸下,然后翻斗落回,稱重系統的完整的稱重運輸循環才算完成,然后進入下個稱重運輸循環。在這個過程中,翻斗舉升時,判斷翻斗舉升的翻斗接近開關動作,稱重系統得到來自接近開關的翻斗舉升信號,稱重系統進入卸車狀態,卸完車后翻斗落回,系統接收到信號,退出卸車狀態,此時載重值歸零,重新開始循環。
4 稱重誤差來源及消除
電動輪卡車稱重系統的主要誤差來源就是對于懸掛的維護[4]。由前面的介紹可知,系統的有效載重值是通過空車狀態和重車狀態時懸掛壓力的差異進行計算的得到的,懸掛如果維護不及時或者維護不正確,那么兩種狀態下的懸掛壓力值會有很大的變化。這里兩個重要的因素就是懸掛里面的液壓油高度和預充的氮氣壓力。預充的氮氣壓力過低或過高,懸掛壓力傳感器所測的壓力值都不能準確地反映懸掛當前所承受的壓力,而液壓油液位過低那么懸掛就不能正確地支撐起卡車的負載,因此懸掛如果沒有正確及時地進行維護保養,稱重系統就不能進行準確地測量載重量[5]。此外,懸掛的維護保養對電動輪卡車的使用壽命也十分重要。
還有就是懸掛壓力傳感器及線路的維護,稱重系統是通過壓力傳感器的反饋電壓來計算懸掛的壓力值,若傳感器或相關線路發生故障,系統將無法獲取懸掛的壓力值或得到的壓力值不準確,同樣的會造成稱重系統不工作或稱重不準,因此維護好懸掛的同時,傳感器及相關線路的維護也很重要。
5 對生產效率提升意義及對減少維護成本意義
電動輪卡車稱重系統會記錄卡車在工作過程中的各項運行數據,維護人員可以將這些數據下載下來,通過分析這些數據可以檢測出卡車本身的多項指標及工作狀況[6-7]。這對于提高生產效率及減少卡車維護成本很有幫助,下面從幾個方面來進行說明。
5.1 監控裝車質量和電鏟裝車效率
稱重系統最基本的功能便是記錄卡車每一次的裝載重量,維護人員通過稱重系統的計算機軟件可以直接生成裝載重量分布的柱狀圖,很直觀地監控卡車的裝車質量,針對裝車質量不理想的卡車合理安排作業,提高工作效率。圖2為86#電動輪卡車6月份裝載重量及車數分布柱狀圖。

圖2 86#卡車裝載重量分布圖
稱重系統還會記錄每一車的電鏟裝鏟數,對于不同車型將電鏟裝鏟數控制在最合理的范圍內將大大減少電動輪的裝鏟時間,提高作業車數及產量;同時電鏟司機裝鏟數過多容易造成超載,增大車輛負荷,造成相應部件加速損壞;裝鏟數過少造成車輛欠載,導致車輛作業效率低下。通過監控電鏟裝鏟數量,提高電鏟司機裝鏟技術水平,可以大大提高電鏟及電動輪卡車生產作業效率,保障設備安全高效作業。圖3為16#電鏟裝載830E電動輪裝鏟數近幾年數據的對比圖。
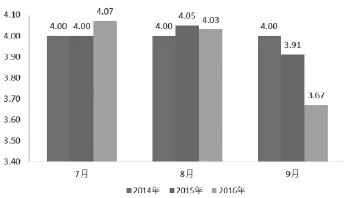
圖3 16#鏟裝載830E平均鏟數
5.2 監控路面平整狀況
電動輪卡車在運行過程中由于路面平整度的變化,4根懸掛所承受的壓力值會隨之發生變化,稱重系統可以通過計算懸掛壓力值變化的情況得出此時車身大梁的受力情況及扭矩變化。維護人員可以分析大梁的受力情況及扭矩變化,當發現某一時刻大梁出現超過極限扭矩的情況,可能是此時卡車作業路面平整度較差,及時對路面進行檢查及整改,杜絕卡車大梁及懸掛發生疲勞性損傷,保障電動輪卡車安全作業。
5.3 監控輪胎TKPH值
當電動輪卡車超載時,卡車輪胎承受超過正常范圍的壓力,不僅會加快磨損速度還會由于氣壓過高造成輪胎過熱,這兩點都會減少輪胎的使用壽命,而卡車超載可分為整車超載和局部超載兩種情況。局部超載即為由于電鏟司機操作不當使卡車裝載不均時,使單邊或部分輪胎承受過大的重量,除輪胎磨損異常外還可能導致前輪轉向困難甚至發生側翻的危險。
稱重系統通過4根懸掛壓力值和卡車載重量以及卡車速度幾個參數,可以計算出卡車左右前輪及后輪平均的TKPH值,通過TKPH值可以反映輪胎當前的使用情況,對于輪胎的維護計劃起到很重要的作用。
5.4 監控駕駛員操作情況
在電動輪卡車運行過程中,超速行駛會存在較大的安全隱患,同時對設備的損耗也比較大。稱重系統會從左后輪獲取速度信號,并將每一車的空車及重車最大瞬時速度記錄下來。維護人員通過下載分析這些數據,可以知道電動輪駕駛員在作業過程中有沒有超速行駛,對于有過超速行為的駕駛員做出相應提醒及警告,杜絕由于超速引發的相關問題。
6 小結
通過稱重系統,我們可以直接獲取電動輪卡車的各項生產數據資料,然后更好地安排電動輪卡車與大型電鏟之間的生產配合,通過分析這些數據,
可以更好地了解卡車的運行情況,對于維修人員故障產生原因的判斷及故障的處理能起到十分重要的作用。因此稱重系統不僅能使電動輪卡車在額定裝載的情況下工作,保證車體各部位均勻受力,還能在平時維修保養中提供幫助,使電動輪卡車能最大限度的延長壽命,創造大量的經濟價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
