集裝箱軌道動力平車通信系統構建研究
2019-05-17 09:01:02黃澤星
鐵路通信信號工程技術 2019年4期
關鍵詞:系統
黃澤星 龔 雪
(中鐵武漢勘察設計研究院有限公司,武漢 430074)
1 概述
集裝箱軌道動力平車是一種自帶動力并運行于鐵路軌道上,具有實時定位、自動駕駛、自動連掛等功能的軌道平板車輛,車體可裝載兩個20 英尺集裝箱或一個40 英尺集裝箱。它是集合鐵路動車、鐵路集裝箱平車車輛、自動駕駛港口集卡車、港口集裝箱自動運輸車AGV 的技術優點進行創新而產生的軌道運輸工具。
集裝箱軌道動力平車由車載計算機控制系統、車體結構系統、走行系統、制動系統、動力及牽引系統(簡稱動力系統)、定位系統、裝載狀態檢測及箱號識別系統(簡稱裝載狀態檢測系統)、運行模式控制系統、通信系統和相關傳感器和電氣接口組成。它可以通過單車或組車的方式運行,其通信不與鐵路既有通信網(包括有線通信、450 MHz 無線列車調度通信系統、GSM-R 無線通信系統、站場無線通信系統等)相連,自形成獨立的專用通信系統,主要以無線通信WLAN 或LTE 等方式存在。
2 集裝箱軌道動力平車通信系統總體結構
集裝箱軌道動力平車通信系統采用車-地通信、車-車通信和車載互聯網3 種通信技術組合方法,解決軌道動力平車在不同工作狀態下對外的控制與狀態數據傳輸問題,采用車載內部總線技術方法,解決軌道動力平車車載控制系統內部控制與狀態數據傳輸。
該系統由自動控制中心、中心-車無線通信系統、車-車無線通信系統、軌道動力平車之間的車載互聯網系統和軌道動力平車內部的車載內部總線系統組成。
1)自動控制中心設置無線通信核心網設備,包括處理信令的服務器,處理數據的服務器、交換設備等,自動控制中心發送工作指令、接受反饋報告;集裝箱軌道動力平車每輛單車設置車載電臺,用于接收控制中心發出的指令并反饋狀態信息;站場及區間設置中繼設備,滿足全區間場強覆蓋的需要。
2)中心-車無線通信系統用于連通鐵路集裝箱自動化控制系統控制中心與軌道動力平車之間控制數據和狀態數據的傳輸,采用成熟的通用移動數據通信技術或鐵路專用移動數據通信技術。
3)軌道動力平車之間的車-車無線通信系統用于車-車重聯/解開過程中兩車之間近距離控制信息的交換,車-車無線通信系統采用小區域以及近場通信等成熟技術。
4)車載互聯網系統是一個有線互聯網系統,用于軌道動力平車重聯運行模式或列車運行模式時車與車之間的控制數據和狀態數據的傳輸;當軌道動力平車重聯或組成列車時,車載互聯網隨著電纜網絡線的自動連接而自動連通。車載互聯網也稱列車總線。
車載內部總線用于連通車載控制系統與車載子系統之間的內部通信總線,車載總線是連通動力系統、走行系統、制動系統、車體結構系統、定位系統、裝載狀態檢測系統、通信系統的通信總線,傳輸車載控制系統控制信息和設備狀態的車載內部總線。
3 集裝箱軌道動力平車通信方法
3.1 車-地通信
車-地無線通信子系統用于實現中心-車無線通信,即自動控制中心與軌道動力平車之間的通信,傳輸信息包括語音、數據、視頻信息。為能夠高速、實時地傳送信息,可選用WLAN 或LTE(4G、5G)技術實現超大帶寬的無線通信。通信方式選用無線天線、漏纜方式,由于港灣站或港區多為開放型空間、電磁環境相對單一、純凈,無線天線安裝方便、可維護性高,可優先考慮無線天線覆蓋方式,有遮擋或者信號傳播受限的區域采用天線加漏纜方式,解決弱場問題。
1)單車運行模式下,每輛單車通過車載電臺與自動控制中心獨立通信。
2)重聯運行模式下,主控車和尾車通過車載電臺接受集裝箱自動化控制系統指令,通過車載互聯網(列車總線)向從控車下達運行控制指令;主控車、尾車在重聯期間不間斷向集裝箱自動化控制系統報告執行進度和位置。從控車在重聯期間處于靜默狀態,接收集裝箱自動化控制系統呼叫,應答報告狀態和位置。
3)列車運行模式下,牽引機車為主控車,主控車和尾車通過車載電臺接受集裝箱自動化控制系統指令,通過車載互聯網(列車總線)向從控車下達運行控制指令;主控車、尾車在列車運行模式期間不間斷向集裝箱自動化控制系統報告執行進度和位置。從控車在列車運行模式期間處于靜默狀態,接收集裝箱自動化控制系統呼叫,應答報告狀態和位置。
3.2 車-車通信
車輛重聯/解開過程中車與車之間的通信尤為重要。在重聯或列車運行模式下,參與通信的單車數量一般較多,多車之間有“多對多”、“一對一”兩種通信方式。
1)“多對多”通信:集裝箱軌道動力平車主控車與線路上所有其他接收到重聯命令的運行單車建立車-車通信。這種通信方式存在廣播風暴問題嚴重,通信時延大等缺陷,不能滿足列控系統要求。
2)“一對一”通信:通過中心-車無線通信系統接收到重聯命令的單車與準備連掛車(前車)建立車-車通信,這種通信方式能夠較好滿足現階段集裝箱軌道動力平車車輛間通信需求。
上述前車判定過程為:單車根據集裝箱自動化控制中心提供的連接指令(包括各待連接車輛的車號和通信地址等信息),并結合定位子系統給出的絕對位置,輪詢接收到連接指令的其余軌道動力平車的位置和運行方向,根據連接指令的其余軌道動力平車的運行方向和距離關系,判定唯一前車,通過前車的通信地址與其建立近場通信;或是直接與前方的鄰近車輛建立近場通信,獲得該鄰近車輛的車號,判斷連接指令中是否包含鄰近車輛的車號。若包含,則判定鄰近車輛為唯一前車;若不包含,則繼續運行至該鄰近車輛的前方,繼續執行直接與前方的鄰近車輛建立近場通信的步驟,直至判定出前車。
以三車通信(不包含主控車)為例,說明多車情況下車-車通信的建立流程,如圖1 所示。
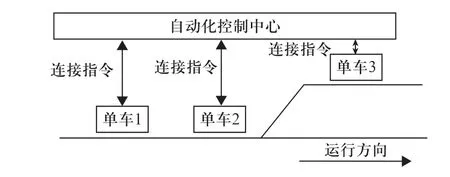
圖1 三車通信示意圖Fig.1 Schematic diagram of three container rail powered flat cars communication
三輛軌道動力平車分別為單車1、單車2 和單車3。三輛單車均收到集裝箱自動化控制中心發送的連接指令,連接指令包括待連接車輛的車號和通信地址號。對于單車1 判定前車的過程為:確定運行方向為直線方向,根據連接指令確定待連接車輛為單車2 和單車3,輪詢單車2 和單車3,獲得單車2 和單車3 的位置和運行方向,根據自身定位子系統提供的自身位置,確定運行方向前方最近車輛為單車2,則判定單車2 為前車;對于單車2,可以采用同樣的方法判定單車3 為唯一前車。在正確進行前車判定后,單車1 通過單車2 的通信地址呼叫前車,單車2 若確認待連接車輛(單車1)的通信地址包含于連接指令中,則無條件應答,從而單車1與單車2 保持一對一通信,互相交換單車位置、速度等信息,使單車1 可以緩慢接近單車2,直至車輛連接。在車鉤連接成功后,雙方鎖閉自動車鉤,連接動力電源通道和車載互聯網通道,關閉近場通信和相對定位子系統,完成重聯。
重聯/列車狀態下,控制中心與主控車和尾車保持通信,其他車由于被判別為從控車,其車載通信系統聽從主控車列車總線的通信控制。從控車僅在控制中心呼叫時給予通信響應,報告自身狀態和位置。
重聯車輛解開過程,如圖2 所示。具體為:軌道動力平車接收到集裝箱自動化控制中心發送的解開指令(包括車號和通信地址等信息)后,確定具有解開指令中車號且與該軌道動力平車相連的軌道動力平車為待解開車輛,通過車載互聯網通知待解開車輛打開與該軌道動力平車連接的車鉤,從而使雙方車鉤斷開連接。在車鉤斷開連接后,兩車建立車-車無線通信,通過車-車無線通信判定兩車相對位置,直到雙方車載控制系統確認重聯解開,雙方關閉車-車通信。雙方向控制中心報告重聯解開。
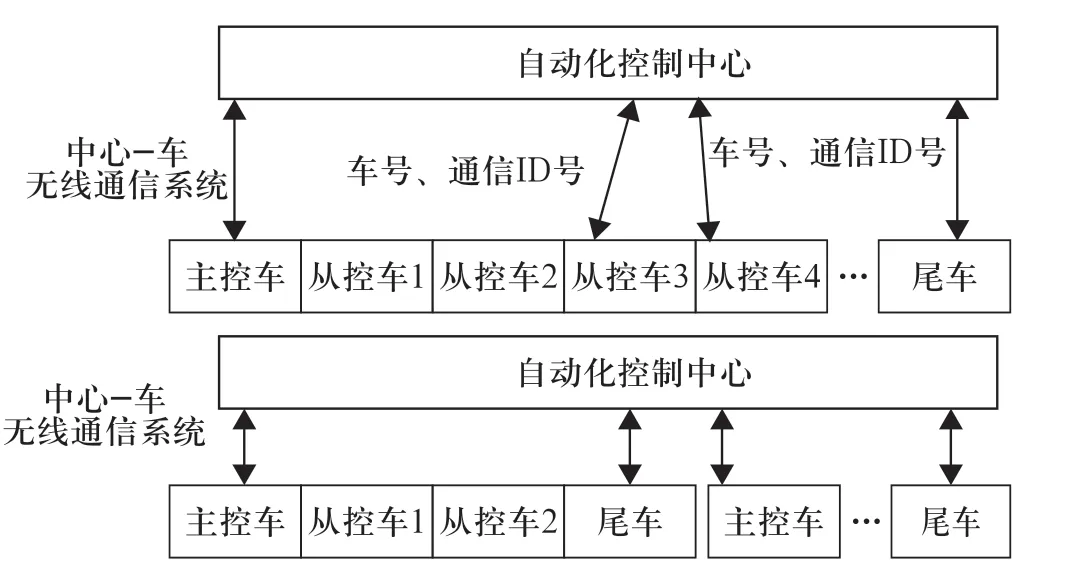
圖2 重聯車輛解開過程示意圖Fig.2 Schematic diagram of unlocking process of reconnected container rail powered flat cars
3.3 車載互聯網通信
車載互聯網通信即為列車總線通信。集裝箱軌道動力平車裝載動力系統、走行系統、制動系統、車體結構系統、定位系統、裝載狀態檢測系統、通信系統等設備,存在著大量的設備控制信息,對信息傳輸的安全性及可靠性要求很高。若采用傳統的布線方式,會使得系統十分復雜,而且可靠性降低,因此采用總線方式來進行信號傳輸。
車載總線系統由列車總線網絡和車輛總線網絡2 個二級子網組成。車輛總線負責將車廂內的各種設備連接起來,列車總線則將一列車的各個車輛連在一起。列車總線由于監控對象多、通信量大,且單車需經常重聯、解開,對網絡的傳輸速率、拓撲性、通信量有較高的要求,采用以太網技術實現。
1)單車運行模式下,車輛總線連接單車車廂的各子系統設備通信接口,解決單車內部各種設備之間的通信,滿足車輛及標準數據通信的需求。車輛總線由每輛單車內固定安裝的電纜及通信節點互聯而成,每輛車設有一個通信節點,重聯或組成列車時,車輛總線通過通信節點與列車總線交換信息,如圖3 所示。
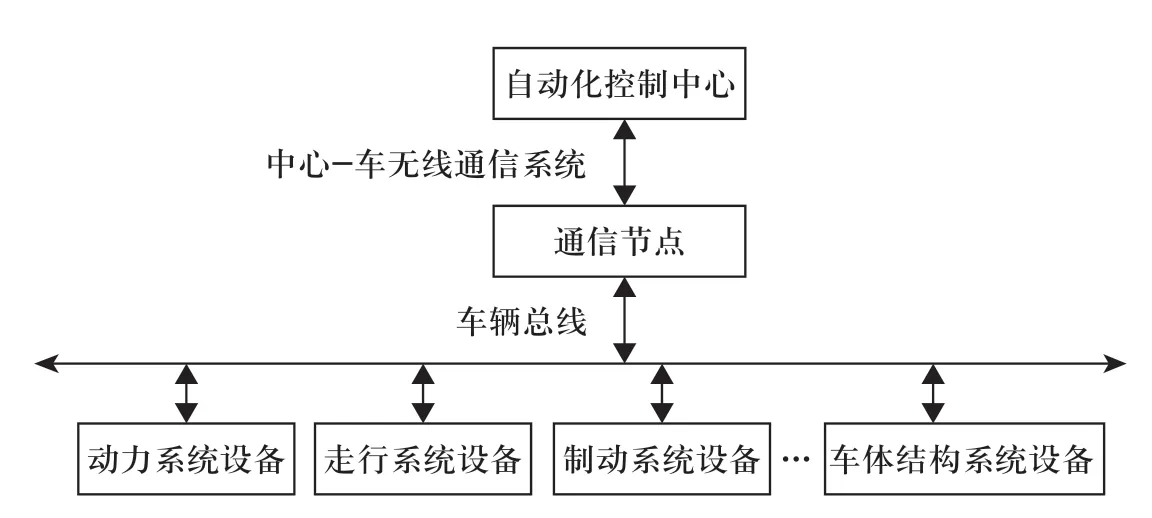
圖3 車輛總線實現方式Fig.3 Implementation of vehicle bus
2)重聯或組成列車時,列車總線連接不同單車的通信節點,使整列集裝箱軌道動力平車組成一個網絡,即車載互聯網(以太網)。具體實現方式為主控車與從控車根據集裝箱自動化控制中心指令進行重聯,重聯成功,車體系統鎖閉自動車鉤,不同單車的列車總線通過預留接口連接成為一個整體。車載互聯網用于傳輸車與車之間的控制數據和狀態數據,如圖4 所示。
重聯或組成列車時,車組在一次運行中有且只有一個控制列車總線工作的主控制節點,位于主控車,車輛總線用以連接列車總線通信節點和該節點所在車內的各種設備。集裝箱軌道動力平車的車載設備接收通信節點命令,將各種信息按一定的格式送往通信節點,從節點則將各設備送來的信息重新編排,按照主控制節點的命令,按順序發往主控制節點。通信節點的功能類似于網關,能夠實現車輛總線與列車總線的協議轉換。通過通信節點,總線才能實現正常工作,完成對整組車的控制、檢測和診斷等信息傳輸。
4 技術效果
本系統采用中心-車無線通信、車-車無線通信、車載互聯網(列車總線)和車輛總線組合的通信方式,滿足軌道動力平車在不同狀態下的通信需求。
1)軌道動力平車與集裝箱自動化控制中心之間采用無線通信。
2)軌道動力平車后車未與前車連接,軌道動力平車與前車之間采用近場通信。
3)各軌道動力平車已連接,軌道動力平車之間采用以太網通信。
5 結束語
不同設備之間以及不同運行狀態下的軌道動力平車之間均采用不同的通信方式,解決在不同作業方式下的通信可靠性和防干擾措施,提高了系統的可用性。根據集裝箱自動化控制中心下發的工作指令,在需要進行車鉤連接/斷開時打開近場通信,避免車鉤錯誤連接和錯誤解開,也避免各軌道動力平車之間通信的相互干擾,提高通信的可靠性。
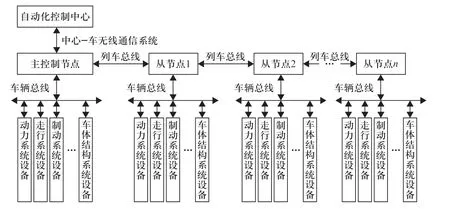
圖4 列車總線實現方式Fig.4 Implementation of train bus
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
