基于單片機的掃地機器人的設計與實現
2019-05-14 08:25:10盧一文
數字技術與應用 2019年2期
關鍵詞:單片機
盧一文
摘要:掃地機器人,是一種智能掃地工具,它可以根據人們的需求,設置并清潔某一區域。本文介紹了掃地機器人的硬件組成及避障原理,即通過紅線避障傳感器探測障礙,從而控制電機轉向實現避障。
關鍵詞:STC89C52;單片機;E18-D80NK-N;紅外避障傳感器。
中圖分類號:TP312 文獻標識碼:A? ? ? ?文章編號:1007-9416(2019)02-0000-00
1 系統的功能分析及體系結構設計
本設計由STC89C52單片機電路、2路紅外避障傳感器模塊、2路按鍵控制電路、L298N電機驅動電路、12V電池盒電路、風扇驅動電路組成。
具體流程:(1)智能小車接電,按下啟動按鍵,小車前行并且風扇開始轉動,開始吸塵;(2)當左側紅外傳感器監測到障礙的時候,系統會控制驅動模塊右轉彎;(3)當右側紅外傳感器監測到障礙的時候,系統會控制驅動模塊左轉彎;(4)按下停止按鈕后,系統會接收到停止命令,小車所有系統停止工作。
2 模塊電路的設計
2.1 STC89C52單片機模塊
為CMOS8位微控制器,呈現出高性能、低功耗的特征,擁有8K系統內置的圖像存儲器。由于考慮實際使用的便捷性,選擇的存儲器具有高密度存儲的優點,與相關設備能夠進行兼容,保證了設備使用的多樣化。且存儲器可以進行編程,實際上 具有的配置能夠滿足工作的需求,包括可編程flash和一個八位中心處理器,在系統工作過程中可以高效的進行工作,并且能夠靈活的為嵌入式控制系統提供相關方案。
的標準功能如下所示:8k字節,256字節,32位 口線,還包括看門狗定時功能,包括三個計數器,兩個數據指針,時鐘電路,全雙工串行口。同時能夠實現0Hz的靜態工作,為了實現能源的節約,在系統中設置有節能模式,具體的模式有兩種,分別是空閑模式與掉電模式。在系統處于空閑模式當中時,處理器停止工作,但是運行狀態與串口可以繼續工作。如果系統處于掉電模式工作狀態下,系統會保存的狀態,對振蕩器進行凍結處理,系統停止所有的工作,直到對其進行復位。
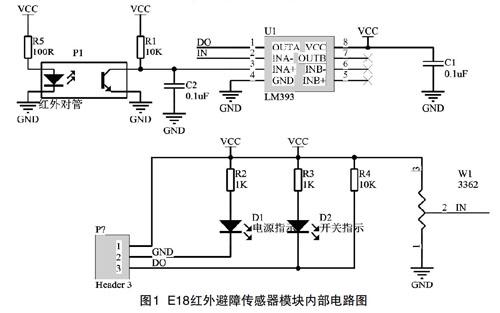
2.2 E18-D80NK-N紅外避障傳感器模塊
是光電傳感器,實現了發射、接收一體化。調制后,系統將光信號發出。為了降低可見光對周圍環境產生的影響,可以使用反射光接收頭對其進行解調輸出。通過透鏡使其能夠對八十厘米距離以內的問題進行檢測。使用電位器對障礙物進行檢測調節,可以實現高精度的障礙檢測功能。傳感器所具有的優點有:成本低廉、探測距離足夠長、操作簡單方便等。[1]
E18紅外避障傳感器模塊內部電路圖如圖1所示,其中R1電阻為分壓電阻,將紅外避障傳感器檢測到的障礙信息轉化為模擬電壓信號,模擬量信號接入LM393比較器后,即可與LM393比較器芯片2號引腳所接的分壓電阻分壓后的模擬電壓進行比較,進而得出DO數字信號(即高低電平信號)。C1、C2為濾波電容,C1電容對電源進行濾波,讓電源輸出更穩定。C2電容對模擬信號進行濾波,保證模擬信號輸出的穩定性。R2、R3均為限流電阻,來保護LED燈,防止LED燈燒壞,LED燈均為低電平有效。R5也為限流電阻,保護紅外發射頭,以防燒壞。使用限流元件可以保證系統穩定的工作,采用R4上拉電阻可以很好的解決這個問題,同時能夠保證其他信號通過電阻鉗位。保證LM393比較器輸出的高低電平信號在與單片機引腳連接時電平信號的讀取更加穩定。
2.3 按鍵電路模塊
為了保證系統操作簡單快捷,在系統外部設置輕觸按鍵,輕觸按鍵屬于按鍵的一個種類,具體可以將其理解成是電子開關。在實際操作時,使用手指輕觸對應功能即可實現操作,在該元件內部設置有彈力金屬片。按鍵在人機交換中有著廣泛的使用,所以選擇合適類型的按鍵能夠保證系統的穩定與安全,在設置引腳的時候可以將其設置為高電平,按鍵導通后,單片機引腳由高電平轉換為低電平。進而實現對系統的手動輸入。
2.4 L298N電機驅動模塊
L298N驅動模塊,采用ST公司的L298N芯片,功率部分的供電電壓介于之間,屬于電機驅動芯片(類型為雙H),每一個H結構都能夠向系統提供2A的電流輸出,采用電源對控制部分供電,通過該模塊的安裝,能夠實現對電機的直接控制,同時保證了對應輸出的穩定提供,也使直流電機的速度能夠方便地加以控制,支持為單片機電路系統提供電源。
直流電機控制信號真值表:
以電機A為例,高電平H:低電平:L。
輸入信號功能:IN1=H;IN2=L:電機A正轉。IN1=L;IN2=H:電機A反轉。ENA=H;IN1=IN2:電機A緊急停車。ENA=L;IN1=X;IN2=X:電平電機A停車情況可以自由選擇。
該模塊通過實驗證實了其具有穩定的工作性能,符合設計的標準。
2.5 BD681風扇驅動電路模塊
散熱風扇在工作的過程中將電能轉化為動能,最終實現散熱目的,在實際應用過程中,能夠對系統的溫度進行有效的調節。風扇的控制不能依靠單片機來實現,故選擇大功率三極管BD6081來實現對馬達的控制,電阻為限流電阻,限流作用,實現三極管的穩定工作。如果檢測引腳處電平為高電平,則導通三極管,風扇啟動,反則不啟動。
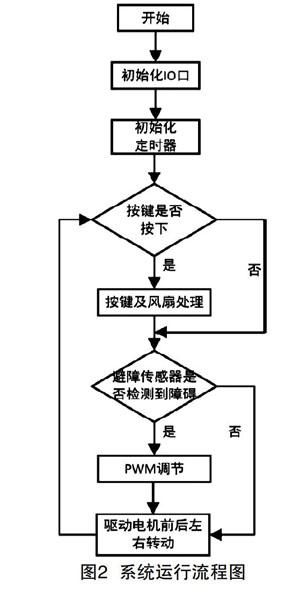
2.6 程序流程圖
在進行程序編寫與調試的過程中使用到了C語言與Keil uVision4工具,工作流程如圖2。
參考文獻
[1]田鵬,李澤滔.基于單片機的紅外避障系統設計[J].自動化與儀器儀表,2015(06):40-42.
Design and Implementation of Sweeping Robot Based on Single Chip Microcomputer
LU Yi-wen
(Zijin College, Nanjing University of Technology,Nanjing Jiangsu? 210046)
Absrtact:Sweeping robot is an intelligent sweeping tool, which can set and clean a certain area according to people's needs.?This paper introduces the hardware composition and obstacle avoidance principle of the sweeping robot, that is, to detect obstacles by red-wire obstacle avoidance sensor and control the motor steering to achieve obstacle avoidance.
Key words: STC89C52;MCU;E18-D80NK-N;infrared obstacle avoidance sensor
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
