智能網聯汽車仿真測試方法*
2019-05-09 06:18:22猶佐龍
汽車工程師 2019年4期
猶佐龍
(重慶西部汽車試驗場管理有限公司)

智能網聯汽車是指搭載先進的車載傳感器、控制器、執行器等裝置,并融合現代通信與網絡技術的新一代汽車。由于智能汽車涉及更加復雜的功能和應用,如何測試和驗證其功能和性能是亟需解決的問題[1-2]。傳統的測試方法主要是道路測試和場地測試,但是都面臨測試成本高、測試工況少、測試周期長等難題,在開發時間、成本、靈活性方面滿足不了智能網聯汽車復雜功能的開發驗證需求。文章將真實駕駛員、真實傳感器、真實控制器在虛擬仿真環境下深度集成,以豐富的測試手段、高度逼真的測試場景、高精度的模擬測試設備,完成覆蓋智能網聯汽車各開發環節的測試驗證,大大縮短并降低智能網聯汽車技術開發和檢驗檢測的周期和成本[3-5]。
1 仿真測試系統架構
智能網聯汽車仿真測試系統,如圖1 所示,其中駕駛模擬系統模擬了真實車輛的運動,可以進行駕駛員主觀評價研究;車輛模擬系統模擬了真實車輛的動力學關系,可以進行車輛的性能研究;環境模擬系統模擬了真實環境中的各類因素;傳感器模擬系統模擬了真實傳感器的反饋信號,使傳感器能在實驗室內被激活;控制器中包含了智能網聯汽車不同系統的不同算法,可以在仿真環境中進行驗證[6-7]。

圖1 智能網聯汽車仿真測試框圖
2 仿真測試系統分析
2.1 車輛模擬系統
車輛動力學模型包含車體動力學模型、發動機懸置模型、轉向系統模型、懸架系統模型、制動系統模型、輪胎模型、動力傳動系統模型和空氣動力學模型等。車輛模型在仿真測試中需要快速的計算,并將計算出的車輛響應結果發送到其它控制器中進行相應的計算和決策。為了實現快速計算,實時系統是必須要使用到的平臺,如圖2 所示,車輛模型在實時處理器中計算的速率延遲可控制在毫秒級;數據采集板卡包含車載CAN總線和車載Ethernet 通信板卡。車輛模型的計算數據通過通信板卡和其他設備進行通信,一方面車輛模型計算數據傳遞給環境模擬系統,使其中的環境隨著車輛模型的運動而變化,另一方面車輛模型計算數據傳遞給駕駛模擬系統,使其按照車輛模型的計算情況進行相應的運動。
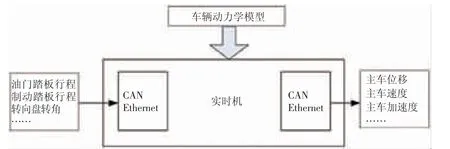
圖2 智能網聯汽車仿真測試車輛模型處理平臺
2.2 環境模擬系統
由于車輛模型軟件的功能局限,其不具備較好的環境建模能力,因此,為了給車輛模型創造較為逼真的外界環境,需要額外的軟件進行環境系統的建模,如圖3 所示。
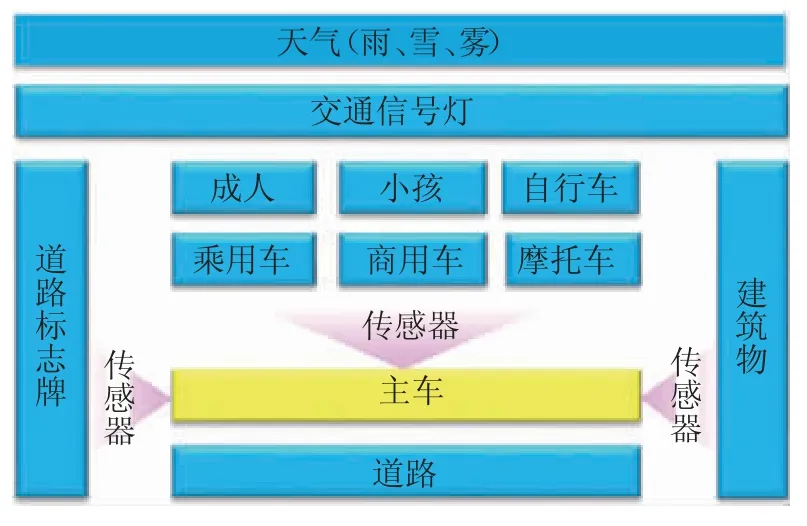
圖3 智能網聯汽車仿真測試環境建模系統框圖
主車為車輛建模軟件中的車輛模型,其與環境建模軟件之間通過特定的接口進行連接,車輛模型的動力學計算部分在車輛建模軟件中完成,計算后的車輛運動學姿態則通過接口傳遞到環境建模軟件中進行顯示。主車上安裝有不同的傳感器,包括攝像頭、毫米波雷達、超聲波雷達、激光雷達等,傳感器的安裝位置和性能參數需要與實車相匹配,以保證傳感器模型識別到的目標信息可以傳遞到控制器中進行正確的計算。
環境模型需要穩定高效地運算各個模塊,因此需要性能較高的工業電腦支持。工業電腦包含高性能圖形處理顯卡和高清畫面顯示器,高性能圖形處理顯卡保證了整個仿真環境的圖形處理能力,高清畫面顯示器則為駕駛員模擬系統提供了駕駛員視角的顯示畫面,也為攝像頭在環測試提供了仿真畫面輸出。環境模擬系統的處理平臺,如圖4 所示。
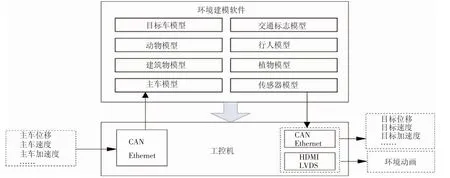
圖4 智能網聯汽車仿真測試環境建模系統處理平臺
2.3 傳感器模擬系統
對于環境建模軟件中無法模擬的傳感器模型或是為了進行傳感器在環測試,需要利用傳感器模擬系統進行真實傳感器的測試。傳感器模擬系統由不同真實傳感器和對應的目標模擬設備組成。不同的傳感器有不同的目標模擬方式,傳感器模擬系統,如圖5 所示。

圖5 智能網聯汽車仿真測試傳感器模擬系統
對于毫米波雷達的目標模擬是利用毫米波雷達模擬設備接收真實雷達的發射信號,并通過一定的時延和多普勒頻移處理,模擬出目標的反射回波,真實雷達接收反射回波后便可得到模擬目標的相關信息;超聲波雷達、激光雷達、V2X 射頻設備的目標模擬與毫米波雷達目標模擬方法類似。對于真實攝像頭而言,目標模擬有2種方式:一種是將真實攝像頭和顯示器共同放在暗箱內,攝像頭拍攝顯示器,并識別顯示器中的模擬目標;另一種是將環境模擬系統中的仿真視頻以視頻流的方式,通過視頻注入板卡直接注入攝像頭圖像處理芯片內。對于傳感器的模擬,有很多供應商提供了相應的解決方案,圖6 示出Keycom 的毫米波雷達模擬系統。
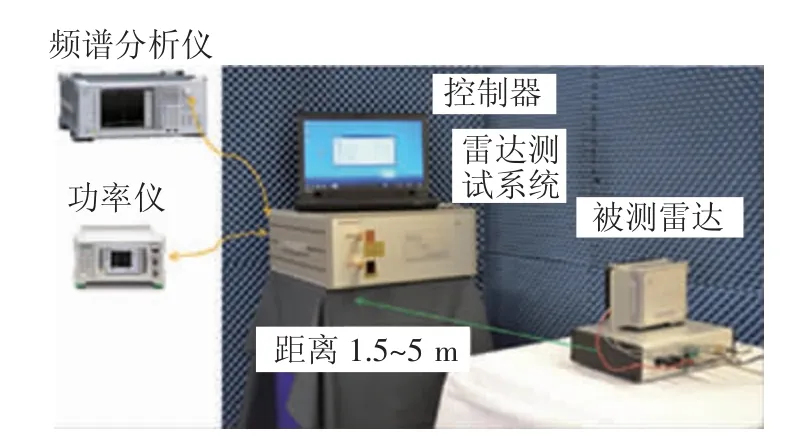
圖6 Keycom 毫米波雷達模擬系統
2.4 駕駛模擬系統
為了研究駕駛員對智能網聯汽車系統功能的主觀評價,必須給駕駛員創造逼真的駕駛環境,因此駕駛模擬系統是必不可少的。駕駛模擬系統的結構框圖,如圖7 所示。
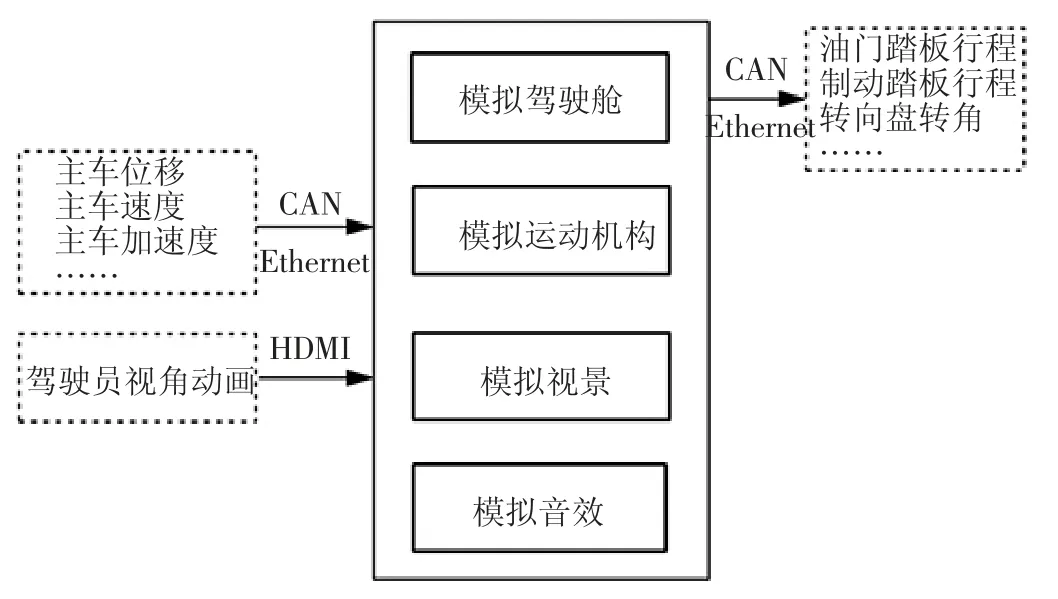
圖7 駕駛模擬系統結構框圖
模擬運動機構用以模擬車輛6個方向的運動情況,包括橫向運動、縱向運動、垂向運動、側傾運動、俯仰運動、橫擺運動;模擬駕駛艙由轉向盤、制動踏板、油門踏板、儀表盤等組成,真實駕駛員可以在模擬駕駛艙內進行駕駛;模擬視景由180°或360°環幕組成,實時顯示駕駛員周圍的環境變化情況;模擬音效系統模擬車輛行駛過程中的各類聲音,包括發動機噪聲、風噪、輪胎噪聲等。駕駛模擬系統中的運動機構由車輛模擬系統中的車輛運動狀態決定,車輛模擬系統中的視景及音效系統由環境模擬系統提供支持。
通過駕駛模擬系統,可以將駕駛員的主觀評價提前到自動駕駛系統開發階段,而不必等到自動駕駛汽車生產出來,大大縮短了自動駕駛系統的開發和測試周期,降低了開發成本。大型駕駛模擬系統之一的INNO 6 自由度駕駛模擬器,如圖8 所示。

圖8 INNO 駕駛模擬器
2.5 控制器系統
控制器系統是智能汽車的控制中心,其可以是快速原型控制器,也可以是車載真實控制器。控制器通過CAN 或Ethernet 連接各個真實傳感器,并接收來自傳感器的目標距離、目標速度、目標加速度等信息,經過計算后將車輛控制信號發送到車輛模擬系統中,控制信號包括加速信號、減速信號、制動信號、轉向信號等。
3 仿真測試系統應用
基于以上仿真測試系統,可以進行智能網聯汽車測試的應用主要分為軟件在環(SIL)、硬件在環(HIL)和駕駛員在環(DIL)。
3.1 軟件在環(SIL)
在智能網聯汽車研發階段,智能網聯汽車的系統算法設計需要不斷地進行仿真測試和優化迭代,因此可利用車輛模擬系統和環境模擬系統兩部分,進行算法仿真所需的車輛模型搭建和環境模型搭建,測試智能網聯汽車系統算法在純軟件仿真環境下的表現情況,特別是可以通過搭建大量的仿真測試場景,去發掘算法中的缺陷[8-10]。由于是在純仿真環境下進行測試,因此可以將測試的計算速度加快,提升效率,縮短測試周期。
3.2 硬件在環(HIL)
硬件在環測試可將智能網聯汽車的一部分或幾部分硬件置于仿真測試的環境中。
對于只針對實車控制器的測試而言,可利用車輛模擬系統、環境模擬系統和控制器系統進行仿真環境的搭建,該測試方案中只有控制器是真實的,車輛模型和傳感器模型都是虛擬的。
對于針對雷達、攝像頭或V2X 設備的測試,則可利用車輛模擬系統、環境模擬系統、傳感器模擬系統進行真實傳感器的在環測試。該方案可對雷達、攝像頭等傳感器的物理性能進行測試和分析,還可以通過仿真環境激活真實傳感器內部的功能進行功能的測試分析。
對于針對智能網聯汽車執行器部件的在環測試,則可將汽車上的執行器(汽車制動系統、轉向系統等)加入到仿真環境,進行功能激活和測試驗證。當然,理論上汽車上的任何部件都可以加入到仿真測試環境中,甚至可以將整個車輛放入仿真環境內。
3.3 駕駛員在環(DIL)
駕駛員在環測試是將駕駛員置于仿真測試環境中,需要的仿真系統包括車輛模擬系統、環境模擬系統和駕駛模擬系統,利用此方案展開的測試包括:1)人機切換策略測試,即在人機共駕過程中,通過對切換時間、舒適性、安全性等的評價,評估人機共駕策略的合理性;2)HMI 系統設計,即配合駕駛模擬器中可配置的人機交互界面,可以在概念設計初期從聲音、圖像等方面對人機交互界面進行主觀評價,盡早發現設計中的缺陷并完善,從而提高設計質量和效率;3)駕駛員行為分析,即利用駕駛模擬器提供的駕駛員在環系統,通過給駕駛員穿戴相關的傳感設備,可以在自動駕駛的不同交通場景下對駕駛員的行為進行分析,如疲勞、注意力、心跳、壓力、焦慮等;4)耐久性測試,即通過建立虛擬的道路、交通、天氣等場景,對自動駕駛系統進行模擬真實道路的耐久性測試。
4 結論
通過搭建智能網聯汽車仿真測試系統,為智能網聯汽車的快速開發和測試驗證提供了有效的方法。利用該系統,可以覆蓋智能網聯汽車從研發到實車測試期間的一系列測試,包括感知層測試、決策層測試、執行層測試以及人機交互和人機界面的測試,加快了智能網聯汽車研發的速度,更節省了許多場地測試和道路測試的成本,對智能網聯汽車的量產起到了推進作用。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
