直立式水下駐留平臺座底穩(wěn)定性分析
2019-05-08 08:05:34張斌
數(shù)字海洋與水下攻防 2019年1期
張 斌
(中國船舶重工集團(tuán)公司第七一〇研究所,湖北 宜昌 443003)
0 引言
為更好地進(jìn)行海洋開發(fā)研究,針對某一海域開展長時間定點(diǎn)監(jiān)測或探測任務(wù),實現(xiàn)諸如海洋水情勘測、海洋水質(zhì)監(jiān)測、海底土壤結(jié)構(gòu)研究、水下建筑物與深海管道檢測等具體功能,逐漸成為各國學(xué)者的研究重心并為之投入了大量精力。傳統(tǒng)海洋工程中常用的AUV或ROV均存在自身缺陷,無法很好地完成此類任務(wù)要求[1-2]。
為解決這一現(xiàn)實問題,具有著陸駐留于海底這一特定功能的水下航行器被研制出來,這類水下平臺自主航行至需要探測或監(jiān)測海域后下潛駐留于海底,在駐留過程中依靠自身機(jī)構(gòu)維持靜態(tài)平衡,在不需要時刻調(diào)節(jié)航行器駐留姿態(tài)的條件下完成探測或監(jiān)測任務(wù)。隨著相關(guān)研究工作的開展,這些可實現(xiàn)駐留功能的水下平臺逐漸在其專業(yè)范圍內(nèi)發(fā)揮出不可替代的作用,在人類深入開發(fā)海洋資源的過程中扮演著重要的角色。駐留于海底的水下平臺在海流作用下不可避免地發(fā)生姿態(tài)與位置變動,其抗流穩(wěn)定性關(guān)系到后續(xù)工作任務(wù)能夠正常開展,必須對其進(jìn)行重點(diǎn)分析。
根據(jù)水下駐留姿態(tài)的不同,可將其分為橫臥式與直立式。兩種方案各有優(yōu)勢,其中橫臥方式具有更好的坐地穩(wěn)定性,而直立式則在資源探測、環(huán)境監(jiān)測及反潛作戰(zhàn)等領(lǐng)域具有更高效率。目前,現(xiàn)有的水下駐留平臺大多采用橫臥方式下潛座底[3-5],對其座底穩(wěn)定性分析大多將海底簡化為剛性平面[6],具有較大的局限性。
本文針對豎直座底駐留水下平臺特點(diǎn),建立適合大攻角運(yùn)動狀態(tài)的海流響應(yīng)運(yùn)動模型,采用姿態(tài)四元數(shù)描述平臺座底姿態(tài)以解決可能出現(xiàn)的數(shù)值奇異現(xiàn)象。基于彈性力學(xué)理論建立符合海底真實物理特性的彈塑性數(shù)值模型并將平臺-海底交互作用融合進(jìn)座底平臺數(shù)學(xué)模型中,對駐留穩(wěn)定性進(jìn)行仿真研究,為實現(xiàn)水下平臺可靠地直立駐留海底提供有意義的參考。
1 坐標(biāo)系選取
為便于建立平臺座底抗流過程中的運(yùn)動學(xué)與動力學(xué)方程,描述海流沖擊作用下的平臺瞬時位置與姿態(tài),引入以下直角坐標(biāo)系[7]:
1)地面坐標(biāo)系Exeyeze:坐標(biāo)原點(diǎn)E可選在海底平面上,即ye=0處;Exe軸位于水平面內(nèi);Eye軸位于豎直面內(nèi),鉛直向上為正;Eze軸的指向參照右手系規(guī)則確定,(ie,je,ke)為該坐標(biāo)系3個軸向的單位矢量。
2)座底平臺體坐標(biāo)系Bxbybzb:各軸與座底平臺固連,原點(diǎn)選在平臺浮心B處。Bxb軸沿平臺縱軸,指向前為正;Byb軸垂直于Bxb軸,當(dāng)座底平臺在地面上水平放置時,指向上為正;Bzb軸垂直于Bxbyb平面,其正向使Bxbybzb構(gòu)成右手直角坐標(biāo)系。
3)座底平臺速度坐標(biāo)系Bxvyvzv:原點(diǎn)與體坐標(biāo)系原點(diǎn)重合,Bxv軸與原點(diǎn)處座底平臺的速度矢量重合;Byv軸位于座底平臺的縱對稱面內(nèi),與Bxv軸垂直并指向上方;Bzv軸垂直與Bxvyv平面,指向按右手直角坐標(biāo)系確定。
通常情況下,體坐標(biāo)系下廣義速度參數(shù)向量Vvehicle可以通過速度與角速度的投影轉(zhuǎn)換矩陣得到與地面坐標(biāo)系中廣義位置參數(shù)向量Rvehicle的具體對應(yīng)關(guān)系。

圖1 坐標(biāo)系示意圖Fig.1 Schematic diagram of coordinate system
2 動力學(xué)與運(yùn)動學(xué)方程
引入下列運(yùn)動參數(shù),包括地面坐標(biāo)系中座底平臺浮心位置矢量與姿態(tài)角共同組成的廣義位置參數(shù)向量Rvehicle=[xe,ye,ze,θ,ψ,φ]T、由體坐標(biāo)系下平臺浮心速度矢量與角速度共同組成的廣義速度參數(shù)向量Vvehicle=[vxv,vyv,vzv,ωxv,ωyv,ωzv]T,由體坐標(biāo)系下平臺所受的力與力矩組成的廣義力參數(shù)向量Fvehicle=[Fxv,Fyv,Fzv,Mxv,Myv,Mzv]T。
基于平臺浮心的動量與動量矩定理,可建立適用于直立式座底平臺抗流工作狀態(tài)的動力學(xué)方程[8]:

式中:Fvehicle為座底平臺所受作用力;

CRB(V)=為6×6階矩陣,其各個子矩陣表達(dá)式如下:
針對水下平臺座底過程中特殊運(yùn)動工況,采用上述歐拉角方法描述平臺運(yùn)動姿態(tài)存在個別姿態(tài)角的不確定性。運(yùn)動學(xué)方程可能出現(xiàn)奇異,例如當(dāng)俯仰角為90°時,平臺偏航角即為不確定狀態(tài)。為此,引入哈密爾頓四元數(shù)描述平臺旋轉(zhuǎn)運(yùn)動及空間姿態(tài),避免參數(shù)退化,減少三角函數(shù)運(yùn)算,提高計算精度[7,9]。
根據(jù)四元數(shù)定義及相關(guān)運(yùn)算法則,可推導(dǎo)剛體平臺角速度在體坐標(biāo)系中的投影,用于表示剛體平臺的旋轉(zhuǎn)運(yùn)動學(xué)方程:

式中q0、q1、q2、q34個參數(shù)可描述平臺轉(zhuǎn)動,且存在如下聯(lián)系方程:

四元數(shù)替換空間歐拉角,可得到如下的地面系與體坐標(biāo)系轉(zhuǎn)換矩陣:
四元數(shù)與空間姿態(tài)角存在一定對應(yīng)關(guān)系:

將式(5)分別代入式(2)、(4)中,即可得到通過哈密爾頓四元數(shù)建立的座底平臺運(yùn)動學(xué)方程。
3 平臺座底過程受力分析
平臺座底抗流底過程中所受到的作用力可大致分為以下幾類:
1)系統(tǒng)體積力:包括其重力向量G=[0,-G,0]和浮力向量B=[0,B,0],由于體積力均指向鉛垂方向故而一般將其合并為凈浮力矢量ΔG,體坐標(biāo)系下其表達(dá)式為

體坐標(biāo)系下體積力對平臺的作用力及力矩可表示為如下廣義參數(shù)向量形式:

2)流體作用力:平臺在流場中不可避免地會受到流體介質(zhì)粘性的影響,諸多文獻(xiàn)在這部分動力學(xué)研究中將粘性流體作用力分為3個部分[7]:定常直線平移運(yùn)動引起的粘性位置力矢量Fμα、旋轉(zhuǎn)運(yùn)動產(chǎn)生的粘性阻尼力矢量Fμω、非定常運(yùn)動引起的慣性力矢量Fλ。其中,粘性位置力向量計算方法如式(8)所示:
平臺旋轉(zhuǎn)運(yùn)動造成的這部分流體動力增量,即粘性阻尼力矢量計算方法如式(9)所示:
平臺在流體介質(zhì)中的運(yùn)動存在平移或旋轉(zhuǎn)加速度時,勢必會改變周圍一部分流體的運(yùn)動狀態(tài),這部分流體動力增量即為慣性力矢量,其具體表達(dá)方式如下:

式中[λ]為附加質(zhì)量矩陣,由平臺空間6個自由度上總共36項運(yùn)動慣性力組成。由曲面積分中使用的高斯散度定理(高斯-奧斯特羅格拉德斯基公式)可知,該矩陣關(guān)于主對角線對稱,此外由于平臺也近似為軸對稱的剛體,[λ]可被簡化為如下形式:

3)海底交互作用力:為獲得平臺與海洋底面之間的相互作用,首先要建立是否接觸海底的判定條件,若滿足以下2個條件中任意1個,則認(rèn)為平臺已經(jīng)觸底[10]:


式中:xe、ye、ze為地面坐標(biāo)系下平臺底端面處軸向坐標(biāo);ybottom為海底三維連續(xù)曲面縱坐標(biāo);nsb為海底與平臺底端面處接觸位置的單位法向矢量,其方向始終由海底指向海水內(nèi)部;v為平臺速度矢量。
對于觸底后的平臺底端面,會受到海底平面法向支撐力矢量Fp及切向摩擦阻力矢量Fμ的作用。由彈性力學(xué)的基本理論可知:

式中:k為與平臺底面接觸部分土壤的剛度;csb為海底粘性阻尼系數(shù)。一般在阻尼振動系統(tǒng)中,用阻尼比表達(dá)標(biāo)準(zhǔn)化的阻尼大小,此處,引入海底彈性支撐的阻尼比ζsb,其定義為


式中:mc為接觸質(zhì)量。將式(15)代入式(14)可以得到:

其中阻尼比ζsb定為0.5[11],可以在不顯著影響系統(tǒng)整體響應(yīng)的情況下消除碰撞海底引起的雜散高頻擾動影響。
由結(jié)構(gòu)力學(xué)的知識可知,剛度不僅僅與材料特性有關(guān),還要考慮整體結(jié)構(gòu)的影響,嚴(yán)格意義上講,平臺底端面接觸部分海底平面剛度k與每個接觸點(diǎn)上海底剛度ksb之間并不存在簡單的線性轉(zhuǎn)換關(guān)系,其取值只能通過大量海底試驗測試的方法獲取。然而對大多數(shù)系統(tǒng)而言,其總體運(yùn)動響應(yīng)對這一取值并不敏感,為簡便起見,此處近似認(rèn)為土壤與平臺底面之間存在一系列相同的接觸面單元并將其應(yīng)力應(yīng)變關(guān)系作為接觸面的本構(gòu)關(guān)系,每個接觸面單元的剛度為

剛度k可以通過下式計算:
式中:ksb為海底剛度;Sbottom為平臺底面與海底接觸面積;dc為平臺底面當(dāng)量直徑。
在滿足海底接觸條件的前提下,平臺在海底三維平面切線方向上與海底存在相對運(yùn)動的趨勢或相對運(yùn)動,使得兩者之間存在摩擦阻力。計算摩擦阻力前,首先要得到速度矢量v在海底三維平面切向上的分量:

根據(jù)庫侖摩擦定理,平臺底面與海底兩者之間存在動摩擦、靜摩擦以及過渡狀態(tài)3種情況:
①vt≠0時,潛標(biāo)底面與海底在切向上存在相對速度,摩擦力矢量Fμ與摩擦面正壓力成正比,方向與相對速度方向相反:

式中:μ為潛標(biāo)底面與海底之間摩擦阻力系數(shù)且具有各向同性。
②vt=0且|Fμ|≤μ|Fp|時,潛標(biāo)底面與海底之間在切向上僅存在運(yùn)動趨勢,屬靜摩擦力:

式中:Fcomposition=FBG+Fμa+Fμω+Fλ。
③vt=0且|Fμ|>μ|Fp|時,此時處于過渡狀態(tài)內(nèi),這是由于采用離散化模型進(jìn)行數(shù)值求解造成的,此時摩擦力已經(jīng)大于最大靜摩擦力,但是潛標(biāo)底面在海底平面切平面內(nèi)仍無速度矢量。過渡狀態(tài)是一個瞬時狀態(tài),只持續(xù)一個時間步長,在這個時間步長內(nèi)完成靜止?fàn)顟B(tài)到運(yùn)動狀態(tài)的轉(zhuǎn)換,摩擦阻力Fμ為

4 座底穩(wěn)定性仿真計算
采用四階龍哥庫塔方法在時域范圍內(nèi)對系統(tǒng)坐底抗流運(yùn)動學(xué)與動力學(xué)模型進(jìn)行求解,部分計算輸入?yún)?shù)如表1所示。
3 kn海流沖擊作用下座底平臺運(yùn)動響應(yīng)參數(shù)如圖2-6所示。可以看到,系統(tǒng)在海流作用下發(fā)生偏轉(zhuǎn),俯仰角由90°開始振蕩減小至88.7°附近,潛標(biāo)偏轉(zhuǎn)角約為1.3°;平臺質(zhì)心位置由于俯仰角的變動也發(fā)生振蕩,穩(wěn)定后y方向偏移2.3 mm,x方向偏移6 mm;質(zhì)心位置的變動由于潛標(biāo)偏轉(zhuǎn)產(chǎn)生,海流作用下平臺并未離地,其底端面始終與海底接觸。

表1 穩(wěn)定性分析計算輸入?yún)?shù)表Table 1 Input parameters for stability analysis and calculation
由計算結(jié)果可知,該直立式水下無人座底平臺可在3 kn流作用下保持穩(wěn)定,具備抵抗3 kn海流能力。

圖2 座底平臺俯仰角隨時間變化情況Fig.2 Pitch angle of bottom-seated platform changing with time
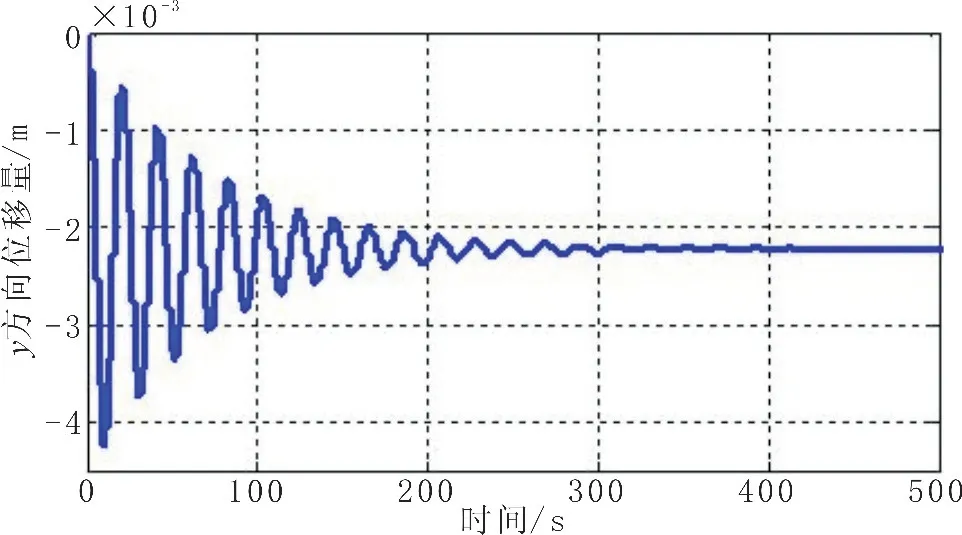
圖3 座底平臺質(zhì)心豎直方向位移量隨時間變化情況Fig.3 Displacement of bottom-seated platform's mass center in vertical direction changing with time
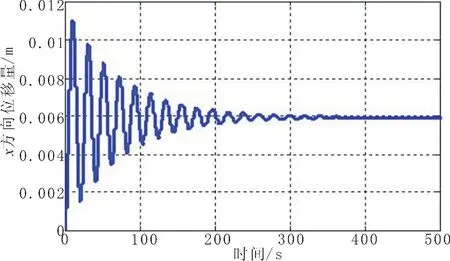
圖4 座底平臺質(zhì)心水平方向位移量隨時間變化情況Fig.4 Displacement of bottom-seated platform's mass center in horizontal direction changing with time
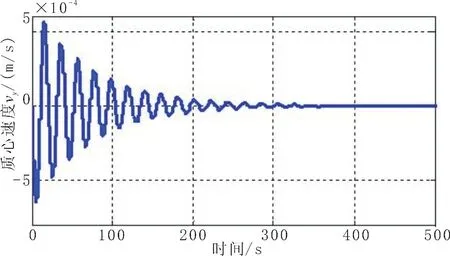
圖5 座底平臺質(zhì)心豎直方向速度隨時間變化情況Fig.5 Speed of bottom-seated platform's mass center in vertical direction changing with time
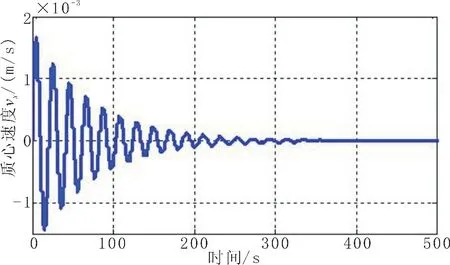
圖6 座底平臺質(zhì)心豎直方向速度隨時間變化情況Fig.6 Speed of bottom-seated platform's mass center in horizontal direction changing with time
5 結(jié)束語
本文在充分考慮海底土質(zhì)真實物理特性的基礎(chǔ)上,建立了海底的彈塑性數(shù)值模型,并基于剛體座底平臺的動量與動量矩定力,結(jié)合四元數(shù)方法修正平臺旋轉(zhuǎn)與浮心運(yùn)動方程,建立大攻角運(yùn)動狀態(tài)下座底平臺三維空間運(yùn)動數(shù)學(xué)模型,在此基礎(chǔ)上對直立式水下平臺座底后海流作用下的運(yùn)動響應(yīng)進(jìn)行仿真預(yù)報,分析其抗流穩(wěn)定性,可為后續(xù)設(shè)計工作開展提供有意義的參考。