基于點約束的工業(yè)機器人標定系統(tǒng)研究
2019-04-29 03:31:38鄧志輝丁晨陽張西良
食品與機械 2019年3期
鄧志輝丁晨陽張西良
(1. 江蘇大學,江蘇 鎮(zhèn)江 212013;2. 常州信息職業(yè)技術(shù)學院,江蘇 常州 213164; 3. 揚州職業(yè)大學,江蘇 揚州 225009)
在現(xiàn)代食品生產(chǎn)工業(yè)體系中,對自動化、智能化的需求不斷提高,工業(yè)機器人作為一種智能自動化裝備在食品生產(chǎn)過程中具有舉足輕重的作用,但工業(yè)機器人存在重復定位精度高、絕對定位精度低的特性,近年來食品工業(yè)中對于絕對定位精度要求高的應(yīng)用場合越來越多,工業(yè)機器人的絕對定位精度遠遠不能滿足要求[1-2]。
影響工業(yè)機器人絕對定位精度的因素很多,主要有熱膨脹、減速器齒輪嚙合誤差、機械結(jié)構(gòu)變形、連桿和關(guān)節(jié)的D-H參數(shù)誤差等[3],而工業(yè)機器人運動學模型的參數(shù)誤差是影響其絕對定位精度的主要因素之一。工業(yè)機器人的大部分運動學參數(shù)(如連桿長度、連桿扭角等)與機械結(jié)構(gòu)有關(guān),這些參數(shù)在工業(yè)機器人生產(chǎn)調(diào)試過程中被設(shè)置并保持[4]。另一些運動學參數(shù),如關(guān)節(jié)偏移角,在長時間運行后或當電機、編碼器被更換時,實際值會發(fā)生改變,從而偏離設(shè)定值[5]。據(jù)統(tǒng)計[6-7],工業(yè)機器人大約88%的絕對定位誤差是由于初始設(shè)定的關(guān)節(jié)角零位偏差值和實際的零位偏差值之間的誤差造成的。因此,必須對工業(yè)機器人的關(guān)節(jié)角零位進行重新標定來提高其絕對定位精度。
當前工業(yè)機器人標定方法主要有立體視覺法、虛擬閉合運動鏈法、協(xié)進化網(wǎng)絡(luò)法、偽誤差法等,所使用的儀器包括經(jīng)緯儀[8]、激光束投影[9]、二維機器視覺[10]、便攜式坐標測量機[11]等,然而,這些方法要么受到環(huán)境的影響,要么耗時且昂貴,在實際應(yīng)用場合很難推廣。時定兵等[12-13]提出了基于點約束的機器人運動學參數(shù)標定方法,但此方法存在2個缺陷:① 需要同時控制待標定的工業(yè)機器人和二自由度平臺,保證激光束能垂直射到位置傳感裝置(PSD)中心點,操作不方便且耗時較長;② 系統(tǒng)采用非固定式單PSD,存在一定的誤差,準確度低。本試驗提出了一種全新的基于點約束的工業(yè)機器人關(guān)節(jié)角零位標定系統(tǒng),采用固定式雙PSD配置,通過對工業(yè)機器人的正、逆運動學和相應(yīng)搜索算法的研究,實現(xiàn)快速、自動、準確的工業(yè)機器人的關(guān)節(jié)角的標定。
1 標定原理
基于雙PSD點約束的工業(yè)機器人零位自標定系統(tǒng)工作原理如圖1所示,首先控制工業(yè)機器人的末端執(zhí)行器到位置1,并調(diào)整方向,使激光照射在第1個位置傳感器(PSD)中心,并反射到第2個位置傳感器(PSD)中心,從而獲得1組工業(yè)機器人關(guān)節(jié)角(6個),同理,在位置2、3、4同樣獲得3組關(guān)節(jié)角,按照工業(yè)機器人正運動學公式,可以計算出4組末端執(zhí)行器的位置和姿態(tài),從理論上來說,位置1、2處激光的線性方程應(yīng)該相同,位置3、4處激光的線性方程應(yīng)該相同,因此,位置1和3、位置1和4、位置2和3、位置2和4等4組線性方程形成的4個交點理論上應(yīng)該是同一點,這樣形成了點的約束,建立約束方程,通過搜索算法而獲得工業(yè)機器人初始關(guān)節(jié)角的零位偏差。

1. 位置傳感固定裝置(PSCF) 2. 位置傳感固定裝置坐標系 3. 位置1 4. 位置2 5. 激光束 6. 位置3 7. 位置4 8. 激光指針 9. 激光指針坐標系 10. 工業(yè)機器人 11. 工業(yè)機器人基坐標系
圖1 工業(yè)機器人標定原理圖
Figure 1 Schematic diagram of industrial robot calibration
2 標定模型的建立
2.1 激光校正模型
如圖1所示,∑o1為PSCF坐標系,∑b為工業(yè)機器人的基坐標系,∑l為固定在工業(yè)機器人末端執(zhí)行器上的激光指針坐標系,且y軸與激光方向一致。FSCF坐標系∑o1和工業(yè)機器人基坐標系∑b的轉(zhuǎn)換關(guān)系是未知的。

(1)
式中:
Jr(q)——基坐標系∑b中工業(yè)機器人關(guān)節(jié)角和末端執(zhí)行器位姿的雅可比矩陣。

(2)
式中:
Jp(Yp)——FSCF坐標系∑o1中工業(yè)機器人末端執(zhí)行器和激光點位置的雅可比矩陣。
假設(shè)工業(yè)機器人的基坐標系∑b和FSCF坐標系∑o1的轉(zhuǎn)換矩陣為T。
(3)
可得:
(4)
Yp=f(Yb,T),
(5)
由式(1)、(2)、(4)和(5),可以得到完整的系統(tǒng)模型。
(6)
基于點約束的工業(yè)機器人標定系統(tǒng)第一步必須進行激光校準,給定2個PSD上激光點的理想位置(PSD中心點)如下:
(7)
由式(6)可以推導出:
(8)
式中:
k——系統(tǒng)增益。

2.2 零位搜索模型
假設(shè)工業(yè)機器人的關(guān)節(jié)角零位偏差值為△q,△q=[△q1,△q2,△q3,△q4,△q5,△q6]T,可以獲得4個位置的工業(yè)機器人實際關(guān)節(jié)角為(q1+△q)、(q2+△q)、(q3+△q)、(q4+△q),根據(jù)工業(yè)機器人的D-H參數(shù),可以計算出在4組關(guān)節(jié)角下工業(yè)機器人末端執(zhí)行器的位姿狀態(tài),并根據(jù)位姿狀態(tài)獲得相應(yīng)的線性方程,獲得相應(yīng)的交點。
計算出的工業(yè)機器人末端執(zhí)行器的位姿線性方程是帶△q的函數(shù),因此,求出的交點也是帶△q的函數(shù)。位置1、2和3、4兩兩組合,形成4個交點p1、p2、p3、p4。求出4個交點的坐標平均數(shù)p=[xa,ya,za]T, 根據(jù)點約束原則,4個交點應(yīng)為同一點,因此,得出方程:
f1=p1-p,
(9)
f2=p2-p,
(10)
f3=p3-p,
(11)
f4=p4-p。
(12)
運用最小二乘法原理,使得函數(shù)f的均方誤差最小,運用Isqnonlin方法進行搜索,從而獲得△q,最終得到工業(yè)機器人的關(guān)節(jié)角零位偏差值,完成標定工作。
3 試驗硬件配置
3.1 硬件組成
基于點約束的工業(yè)機器人關(guān)節(jié)角零位標定系統(tǒng)的硬件配置如圖2所示,主要由六自由度的ABB工業(yè)機器人(IRB120)、工業(yè)機器人控制器(IRC5 M2004)、固定在工業(yè)機器人末端執(zhí)行器上的激光指針、固定在激光指針附近照相機以及位置傳感固定裝置(PSCF)組成。照相機主要作視覺伺服以確定激光指針的初始位置和角度。
3.2 位置傳感固定裝置
位置傳感固定裝置如圖3所示,包括信號放大電路、數(shù)據(jù)采集模塊、USB無線傳輸模塊、電源模塊。PSD作為核心部件,選擇了OSI系統(tǒng)公司的SPOT系列產(chǎn)品,其分辨率為0.1 μm。即使在試驗條件下,其分辨率仍可達2 μm,因此,完全能滿足校準系統(tǒng)的要求。
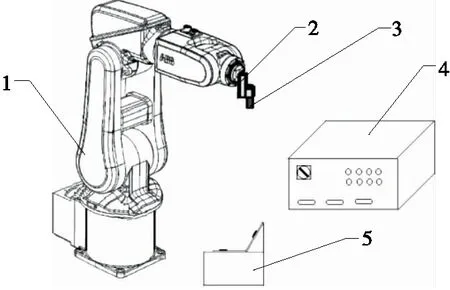
1. ABB工業(yè)機器人(IRB120) 2. 照相機 3. 激光指針 4. 控制器(IRC5 M2004) 5. 位置傳感固定裝置(PSCF)
圖2 雙PSD工業(yè)機器人標定系統(tǒng)硬件配置
Figure 2 Hardware configuration of industrial robot calibration system

圖3 位置傳感固定裝置
3.3 試驗工業(yè)機器人D-H參數(shù)
本文采用ABB公司的IRB120型工業(yè)機器人作為試驗對象,其D-H參數(shù)如表1所示。
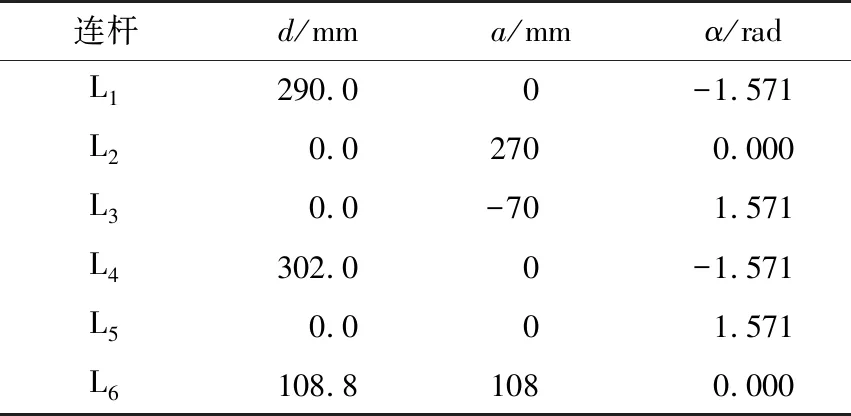
表1 IRB120型工業(yè)機器人D-H參數(shù)
4 試驗與分析
4.1 激光校正試驗
基于點約束的工業(yè)機器人標定試驗第一步必須假設(shè)預估矩陣,并且要求預估矩陣的位置符號與實際變換矩陣的位置符號必須相同,預估矩陣的旋轉(zhuǎn)角和實際變換矩陣的旋轉(zhuǎn)角誤差不能超過90°,這樣才能保證快速的獲取4個位置工業(yè)機器人關(guān)節(jié)角。因此,試驗前必須恰當擺放位置傳感裝置的位置。
本試驗中,擺放位置傳感裝置的位置,使得PSCF坐標系和工業(yè)機器人基坐標系的角度近似為0°,并測量出2個坐標系之間的位移近似為P=[-341,0,-125]T,從而獲得預估變換矩陣為:
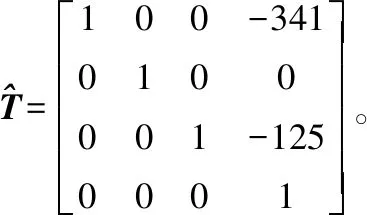
(13)
利用固定在工業(yè)機器人末端執(zhí)行器上激光指針附近的照相機,通過視覺伺服功能,使得激光束能夠照射到第1個PSD上,并且反射到第2個PSD上,再運用本文建立的標定模型和預估變換矩陣,實現(xiàn)激光束的PSD中心校準,如圖4所示,由于預估變換矩陣和真實變換矩陣存在一定誤差,收斂過程中存在一些振動,但整體趨勢會迅速收斂,同時由于工業(yè)機器人精度的限制,收斂后的存在一定微小的振動,但不影響整體標定系統(tǒng)。
4.2 試驗數(shù)據(jù)與分析
運用激光束校準方法,通過試驗測量了6組數(shù)據(jù),如表2所示。
對表2的數(shù)據(jù)分別運用MATLAB中的Isqnonlin函數(shù)進行搜索,設(shè)置迭代初值x0=[0,0,0,0,0,0]T,設(shè)置函數(shù)值的終止容限為1e-5,最大迭代次數(shù)為2 000,根據(jù)本試驗用IRB120型工業(yè)機器人狀況,關(guān)節(jié)角誤差不會超過±4.5°(0.078 5 rad),因此,設(shè)定目標的上下限值分別為:
V1=[0.078 5,0.078 5,0.078 5,0.078 5, 0.078 5,0.078 5]T,
(14)
V2=[-0.078 5,-0.078 5,-0.078 5,-0.078 5,-0.078 5,-0.078 5]T。
(15)
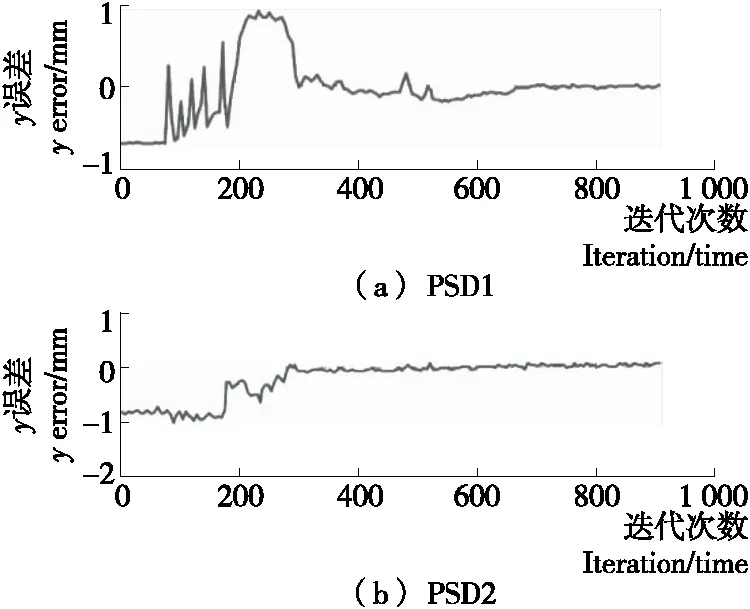
圖4 激光束校準y軸位置誤差
從表3可以看出,6組數(shù)據(jù)獲得的工業(yè)機器人關(guān)節(jié)角偏差值中,除了J2和J3完全一樣,其他都存在一定的差異。比較Isqnonlin函數(shù)的參數(shù)設(shè)置,可知J2和J3的偏差值已經(jīng)到了目標設(shè)定的上限值,雖然在6組數(shù)據(jù)中計算出的偏差值一致,但并不能說明為其真實的偏差值。
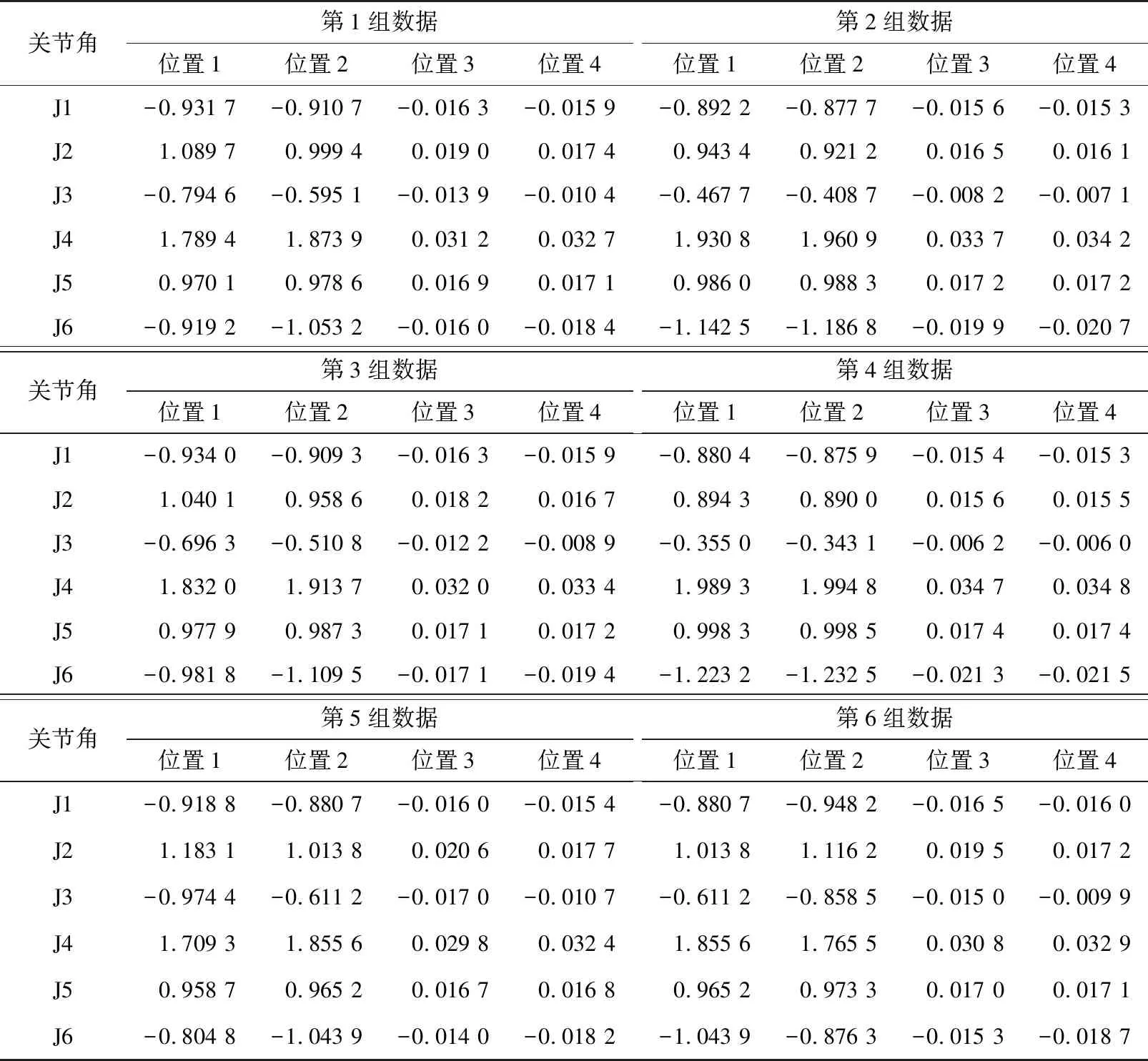
表2 激光校準測量數(shù)據(jù)
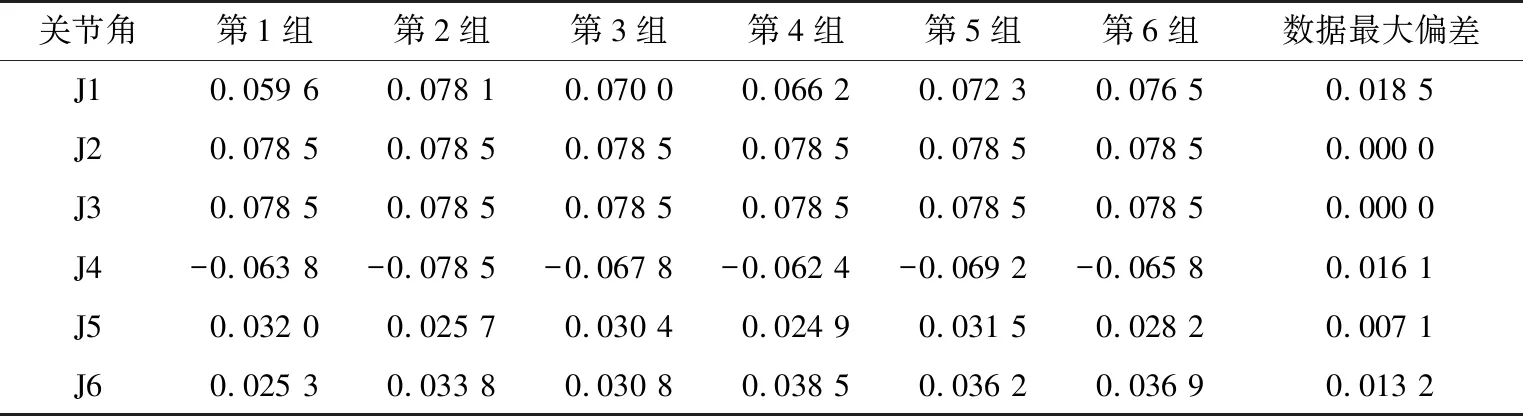
表3 工業(yè)機器人關(guān)節(jié)角標定結(jié)果
通過對圖1進行分析,工業(yè)機器人第1關(guān)節(jié)角J1的偏差可以當作工業(yè)機器人基坐標系圍繞z軸旋轉(zhuǎn)J1偏差角度,從而直接影響PSCF坐標系和工業(yè)機器人基坐標系之間的真實變換矩陣,即J1的偏差可以融入到2個坐標系的真實變換矩陣中,并不影響J2~J6關(guān)節(jié)角的標定。因此,假設(shè)J1的偏差值為0,運用Isqnonlin函數(shù)重新計算J2~J6的偏差,結(jié)果如表4所示。
從表4可知,在假設(shè)關(guān)節(jié)角J1的偏差為0時,分別以6組數(shù)據(jù)搜索計算出得的關(guān)節(jié)角J2~J6偏差值基本一致,雖然沒有通過其他方法來測量試驗用工業(yè)機器人關(guān)節(jié)角的真實偏差,但從6組數(shù)據(jù)的一致性,基本可以證實基于點約束的工業(yè)機器人標定系統(tǒng)的有效性和精確性。
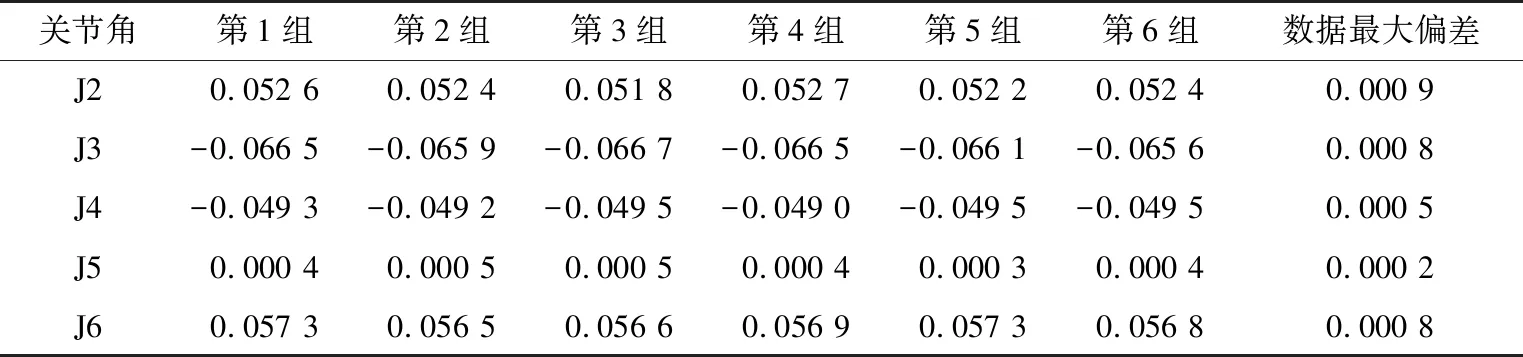
表4 工業(yè)機器人關(guān)節(jié)角標定結(jié)果
5 結(jié)論
(1) 基于點約束的工業(yè)機器人標定系統(tǒng)能夠快速精確地標定出工業(yè)機器人關(guān)節(jié)角的零位偏差(J1除外)。
(2) 系統(tǒng)對硬件的依賴程度較低,對操作人員的要求也不高,能夠大大降低工業(yè)機器人標定的成本,有效克服了傳統(tǒng)標定方法依賴昂貴的儀器設(shè)備、耗時較長、對標定人員要求較高、精度較低等缺陷。
(3) 目前,系統(tǒng)在激光束的定位效率、搜索計算效率等方面還有待提高,下一步工作需要在降低激光束迭代次數(shù)(多目標控制)和搜索算法方面做進一步研究。
隨著工業(yè)機器人的應(yīng)用領(lǐng)域不斷增多,對精度要求越來越高,工業(yè)機器人的關(guān)節(jié)角標定顯得越來越重要,基于點約束的工業(yè)機器人標定系統(tǒng)具有易操作、低成本、易攜帶的特點,對促進工業(yè)機器人在食品行業(yè)的進一步推廣和應(yīng)用,提高工業(yè)機器人的絕對定位精度具有十分重要的意義。
