一種基于無人機的多傳感器環境監測平臺
2019-04-26 05:02:58邱洋苑俊英陳海山
電子技術與軟件工程 2019年4期
關鍵詞:設計
文/邱洋 苑俊英 陳海山
1 引言
傳統的環境監測方式往往以地面設立監測點為主,而對于地形廣闊、環境復雜、監測設施數量有限等情況,既存在監測成本較高、實時性差、效率低等問題,還存在獲取的數據空間覆蓋程度有限、不能對污染物來源及其變化趨勢分析進行有效預測等問題。在我國環境污染問題日趨嚴重的時代背景下,環境監測需求、監測難度、檢測范圍與監測實時性要求都急遽增加,導致傳統的環境監測方式已經不能滿足實際需求。在大氣環境監測領域,地面監測是目前主要的監測手段,但對于一些排煙類的大氣污染物還沒有很好的浮空采樣監測方法。
近年來,隨著技術的不斷進步與成熟,無人機在各行業都得到了快速應用,呈現出無人機+行業應用的發展趨勢,為環境監測提供了一種新的技術手段。將無人機與物聯網技術相結合,可以充分發揮無人機不受地形、空間、時間等因素影響的優點,實現一種更加安全高效、機動靈活、精細準確、作業成本低的環境監測模式。基于無人機的環境檢測平臺既可以廣泛應用于常規環境監測,也可以用于特殊場景(如火災、氣體泄漏等高危環境),滿足實時、有效、準確地對環境動態監測的要求。
無人機環境監測系統一般由機體、機載通信設備、地面設備、機載環境監測設備和信息處理系統等組成,實現飛行、操控、信息傳輸與數據處理等功能。機載環境檢測設備一般由傳感器、攝像機、GPS和嵌入式系統等組成,完成環境參數、圖像、地理位置等信息的采集、匯集和預處理。環境參數經通信設備發送到地面設備,最后由信息處理系統進行處理和信息呈現,實現人機交互。
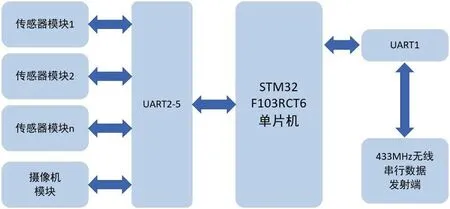
圖1:數據采集系統設計
本文設計了一種可配置多種傳感器的無人機環境監測平臺,從環境監測設備、無線數據傳輸、信息處理系統等三個方面進行了探索,實現了基于小型四旋翼無人機與傳感器相結合的大氣環境參數監測系統。通過實地監測測試,本文方案能夠支持圖像采集、GPS定位、高度測量、空氣溫濕度以及常見氣體濃度等,可以滿足空中測繪、農作物監測、 環境監測及預警、礦產資源探測、應急救災等應用場景需求。
2 相關研究
基于無人機的環境監控模式能夠不受地形、空間、時間限制,可以人工控制無人機在空中停留并進行環境監測,可以極大地降低高空污染物的檢測難度和危險性。謝濤等人[4]設計了一種基于無人機大氣環境監測模式方案,為突發性大氣污染事件的應急監測提供了一種新的技術平臺,并提出了未來有待深入研究的主要方向。楊海軍等人[5]以化學工業區為研究對象,采用無人機搭載采樣器的方式,對污染氣體中的NO、CO、SO2等進行監測。為解決城市空氣質量監測設備匱乏問題,李壯等人[6]提出了一種基于四旋翼無人機空氣質量監測系統的總體設計。滕騰等人[7]利用無人機遙感監測技術解決CO2地質封存泄漏風險事故監測的問題,通過環境背景值監測、試驗監測、理論模擬和數據對比分析的方法為無人機遙感監測技術對CO2泄漏風險事故的響應效果進行了研究。為應對區域空氣監測突發空氣質量事件應,楊國林等人在監測的空氣微小顆粒物及溫濕度的基礎上,利用北斗技術對監測區域監測進行了評估。朱易峰等人[12]把無人機技術應用于危化品事故救援,擴展了無人機+行業應用的范圍。
上述無人機+環境監測方案的功能都較為單一,未能充分利用無人機受空間限制小的優勢,應用領域通用程度可以進一步提高。本文采用低成本的四旋翼無人機,搭載多種高精度傳感器,配合GPS和攝像機,設計并實現了一種基于無人機的多傳感器環境監測平臺,期望拓寬改平臺在實際應用中的適應能力。
3 解決方案
本文設計的環境監測平臺包含集成多傳感器的無人機及其配套軟硬件,在使用過程中僅需一臺計算機,即可使用地面終端無線控制無人機執行任務,能夠適應移動受限或難以到達目的地等應用場景。在發生自然災害時,如災區道路交通及通訊均中斷的情況下,即可使用無人機現行進入災區觀測。與現有技術相比,本文設計的環境監測平臺具有集成度高、應用場景廣,功能擴展性強等特點。
3.1 系統架構
無人機分為飛控、傳感器、攝像機模塊,飛控使用APM2.8模塊作為控制器,傳感器使用STM32單片機作為控制器,攝像機可直接將視頻信號傳輸到地面PC客戶端,所有數據匯集到地面的PC客戶端后,地面站軟件可根據回傳的數據實現分析、顯示,控制無人機行動等功能。
3.2 數據采集系統設計
在數據采集系統中,傳感器均通過通用異步收發傳輸器(Universal Asynchronous Receiver/Transmitter:UART)與STM32單片機相連接,傳感器模塊設計框圖如圖1所示。數據采集與處理流程為:在無人機上電后硬件自動初始化,完成GPS搜星和傳感器預熱。系統在執行任務時先讀取無人機的位置信息,即經緯度和高度,接著讀取環境傳感器信息,并把這些信息實時回傳到地面計算機存儲備用,同時根據預設的閾值判斷環境數據是否超標,如或超過預定標準則顯示報警信息。

圖2:空氣中氣體含量變化
3.3 環境參數
本文設計的環境監測平臺可以采集的數據有地理位置,高度,溫濕度,PM2.5,CO2,CO濃度等,還能夠采集實景圖像和人物跟蹤等。
3.3.1 高度計算方法
本文選用的氣壓高度計為APM2.8飛控模塊集成的MS5611氣壓高度計,該傳感器根據地球表面的氣壓隨高度上升而減小的原理設計而成,郝振海研究了高度氣壓計的實際工作原理,測算出了大氣壓與海平面相對高度計算公式:

其中,hb為傳感器測得的無人機當前所處的海拔高度,PS為傳感器測量到的氣壓,β為大氣溫度梯度,P0為標準大氣海平面大氣靜壓力。在實際應用中,起飛點初始測得初始海拔高度h0,飛行過程中使用測得的hb減去h0,即可得到無人機當前的飛行海拔高度。
3.3.2 PID控制方法
PID控制是一種由比例部分P、積分部分I、微分部分D 三種因素變量組合在一起對輸入參數進行計算處理后輸出的控制方法。
4 實驗驗證
本節旨在測試無人機環境監測平臺在不同場景下的應用效果,從而驗證方案的可行性和平臺的穩定性。
PM2.5是近年來最具代表性的空氣污染物,人體吸入后會粘附在肺泡中不能排出。為了突出空氣中PM2.5的變化量,選取兩個地點在下雨前后的兩個時間段進行測試,得出如圖2(a)所示的分析結果。可以明顯看出在同一時間段PM2.5含量有所差別但差距不大,而在下雨后的空氣中,PM2.5的含量明顯降低。
CO2是造成溫室效應的主要因素,過高的CO2濃度還會影響人類呼吸造成神志不清等情況。因此,在高濃度的CO2環境中(如火災現場),采用無人機進行監測和搜尋是一種有效的手段。為突出CO2的濃度變化,選定同一時間段的兩個地點以及同一地點早晚的兩個時間段進行了測試。得出了如圖2(b)所示的實驗結果。由于禮堂(藍色線)建筑物較為稀疏,場地較為空曠,故其含量相較于建筑物密度較大、人類活動較多的西區(黑色線)要低。而不同時間段的對比則更為明顯,西區上午(黑色線)的CO2濃度相較于同一地點下午的(紅色線)要低,這也符合植物光合作用吸收二氧化碳的時間規律。
無人機具有移動速度快和高度優勢,因此攜帶上攝像機的無人機可捕捉寬廣的視域,可利用這一特點實現無人機巡線、尋人、污染溯源等功能,在本文所設計的無人機中還融入了無人機視覺跟蹤系統,可根據實際需求,選擇追蹤的對象。
5 總結
本位采用無人機平臺設計了一種集成多傳感器的環境監測平臺,能夠解決一般和特殊場景下圖像拍攝以及環境參數采集的目的。為進一步推動該平臺的應用,進一步的研究方向有典型場景下環境參數的模型,探索根據經驗值設置響應的預警和報警機制等。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04