基于數(shù)據(jù)融合的模擬低重力步態(tài)識別方法
2019-04-25 08:49:40王道臣何其佳張利劍
載人航天 2019年2期
常 遠,王道臣,郝 軼,劉 昊,何其佳,張利劍
(1.北京機械設(shè)備研究所,北京100854;2.北京靈汐科技有限公司,北京100854)
1 引言
未來太空探索可能面臨現(xiàn)場勘查、標本采集、儀器攜帶、營地建設(shè)和設(shè)備操作與維修等各項復(fù)雜任務(wù)[1],航天員需要在未知、復(fù)雜地形完成大量的艙外行走、蹲起、搬運、負重、操作等動作。航天員穿戴具有自主式生保系統(tǒng)的艙外航天服,雖然地外空間為低重力環(huán)境,但艙外服整體質(zhì)心外移,而且服內(nèi)大氣壓給關(guān)節(jié)自由度運動帶來困難,航天員關(guān)節(jié)運動存在較大阻力[2-3],實施空間作業(yè)任務(wù)依然不會輕松。因此,國內(nèi)外機構(gòu)研究通過外骨骼助力的主動航天服實現(xiàn)空間助力,例如,為提升航天員作業(yè)能力和作業(yè)績效,NASA(美國宇航局)開發(fā)了X1空間外骨骼機器人,ESA(歐洲空間局)研制了手臂外骨骼[4-5],我國電子科大、哈工大及航天科工二院二〇六所等單位也開展了相關(guān)研究[6-7]。為實現(xiàn)主動航天服的人機協(xié)同助力,需要首先辨識人體-主動航天服的姿態(tài)和步態(tài)為助力控制提供關(guān)鍵信息。而月面工作環(huán)境與地面存在較大不同:月面重力是地面的1/6、月塵松軟、航天服阻尼較大等,會極大影響足底交互力形式和步態(tài)特征,與地面存在較大差異,對姿態(tài)/步態(tài)辨識產(chǎn)生較大挑戰(zhàn)。
為了在地面研究和驗證低重力步態(tài),要構(gòu)造一套力學(xué)系統(tǒng)來模擬低重力環(huán)境,目前主要有立式懸吊、躺臥懸掛、失重飛行、浸水等實現(xiàn)方式[8]。其中,垂向立式懸吊最普遍,其缺點是要有較高懸掛吊點,而且僅懸掛軀干使擺動腿仍受全重力;躺臥懸掛可更好對腿部進行低重力模擬,該方式曾被Roscosmos(俄羅斯宇航局)和NASA用于航天員太空旅行前的訓(xùn)練[8],但不能讓人的軀干體驗到水平加速度;失重飛行最理想,但成本高而且可用時間短;浸水較為理想,但運動流體產(chǎn)生阻力會造成附加誤差。目前,我國航天員的訓(xùn)練及相關(guān)測試實驗一般選用立式懸吊和水槽實驗,例如航天員訓(xùn)練中心借鑒文獻[9]設(shè)計了立式懸吊系統(tǒng)并進行了零重力和g/6、g/3低重力行走測試和分析[10-11]。
目前國內(nèi)外對低重力步態(tài)的研究主要分析不同重力對行走特性的影響分析和仿真,未考慮面向主動航天服的步態(tài)辨識[10-13],文獻[7]涉及步態(tài)辨識,但未考慮低重力的影響也未在低重力模擬環(huán)境下進行驗證。本文針對主動航天服的步態(tài)識別問題,搭建一套多源數(shù)據(jù)傳感采集系統(tǒng),通過數(shù)據(jù)融合提取姿態(tài)和行走步態(tài)信息,結(jié)合人體行走的周期性特征,采用模糊邏輯進行姿態(tài)和步態(tài)識別,為助力系統(tǒng)控制提供關(guān)鍵的依據(jù)信息。
2 步態(tài)識別方法
數(shù)據(jù)融合是充分利用不同時間與空間的多傳感器信息資源,對按時序獲得的多傳感器觀測信息在一定準則下加以自動分析、綜合、支配和使用,獲得對被測對象的一致解釋與描述[14]。數(shù)據(jù)融合一般分為數(shù)據(jù)級、特征級和決策級融合3個層次。基于數(shù)據(jù)融合的模擬低重力步態(tài)識別方法示意框圖如圖1所示。其中,“左雙支撐”指左腳著地但右腳未離地,左腳在前的雙支撐狀態(tài);“左單支撐”指左腳著地支撐,右腳離地擺動,左腳單支撐狀態(tài);“右雙支撐”指右腳著地但左腳未離地,右腳在前的雙支撐狀態(tài);“右單支撐”指右腳著地支撐,左腳離地擺動,右腳單支撐狀態(tài)。人體行走時,不斷在這4個狀態(tài)之間進行切換。
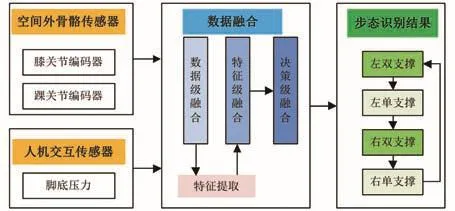
圖1 基于數(shù)據(jù)融合的模擬低重力步態(tài)識別方法Fig.1 Gait recognition under simulated low gravity based on data fusion method
數(shù)據(jù)級融合是直接在采集到的原始數(shù)據(jù)層上進行的融合,結(jié)合傳感器自身信息,進行校準、關(guān)聯(lián)、跟蹤等局部處理。助力外骨骼主要采集足底壓力和關(guān)節(jié)角度,因此這兩種傳感器數(shù)據(jù)進行野點剔除、濾波和標度變換等處理,如圖2所示。
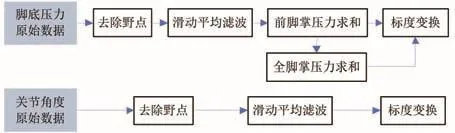
圖2 數(shù)據(jù)級融合處理Fig.2 Fusion at data level
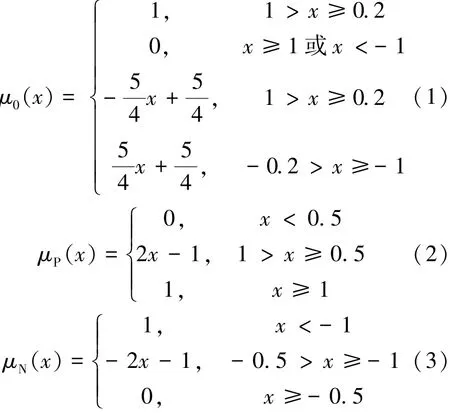
特征級融合在初級處理的基礎(chǔ)上,提取有意義的特征,從而豐富數(shù)據(jù)的表達能力,并進行統(tǒng)一數(shù)學(xué)表達,達到信息壓縮目的,有利于實時處理。這里提取左右腳壓力和各關(guān)節(jié)角度上升時間、變化幅度、變化方向等運動趨勢特征,并對這些特征進行模糊化,得到統(tǒng)一的隸屬度表達。以變化趨勢特征為例,采用如圖3所示隸屬度函數(shù)。
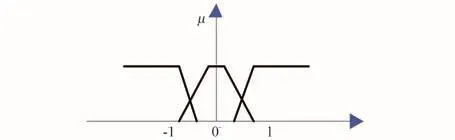
圖3 角度變化隸屬度函數(shù)Fig.3 Degree of membership function for angle slope
其“不變”、“正向變化”和“負向變化”的函數(shù)表示分別為式(1)~(3):
決策層融合輸出是聯(lián)合決策的結(jié)果,即利用融合的特征,通過模糊決策、貝葉斯推論、機器學(xué)習(xí)分類等方法確定系統(tǒng)所處的狀態(tài)。本文考慮步態(tài)是一系列有次序的運動過程,相位劃分界限不完全精確的特性,將有限狀態(tài)機(Finite State Machine,F(xiàn)SM)與模糊邏輯相結(jié)合進行狀態(tài)切換,即模糊有限狀態(tài)機(Fuzzy Finite State Machine,F(xiàn)FSM)。FSM是將步態(tài)相位定義為有限個狀態(tài),通過判斷切換條件,確定是否進入下一狀態(tài),該方法可保證步態(tài)識別的可靠性,避免時序錯亂。在此基礎(chǔ)上設(shè)計模糊規(guī)則 FFSM ={S,μ,Q},其中 S表示當前狀態(tài),μ表示條件組合的隸屬度值,Q表示輸出狀態(tài)。在當前狀態(tài)S下,通過計算進入下一狀態(tài)Q的隸屬度函數(shù)μ是否大于特定閾值即可判斷切換條件,完成了去模糊同時實現(xiàn)狀態(tài)切換的決策。例如,當前狀態(tài)為“左雙支撐”,下一狀態(tài)為“左單支撐”,如果通過計算左腳壓力持續(xù)增加且右腳壓力降低為零的隸屬度,如果結(jié)果為1,則發(fā)生狀態(tài)切換,否則維持原狀態(tài)。該過程表現(xiàn)為計算“When(左雙支撐):If(左腳壓力持續(xù)增加and右腳壓力降低為零),then(左單支撐)”的邏輯形式。
3 運動數(shù)據(jù)采集與分析
3.1 模擬低重力試驗系統(tǒng)
北京機械設(shè)備研究所的人體機能增強中心實驗室參照文獻[15]設(shè)計并建造了一套模擬低重力實驗裝置。該裝置采用立式懸掛方式對低重力進行補償裝置,利用彈性長繩構(gòu)成多點懸吊機構(gòu),在人體的雙側(cè)小腿、雙前臂及軀干等質(zhì)心位置處施加近似恒定的垂直向上的拉力,進行部分重力補償,實現(xiàn)對月球低重力環(huán)境g/6的近似模擬。
3.2 運動信息采集
由于人體行走步態(tài)的相位特征和時序特性,需要同步采集足底壓力和關(guān)節(jié)角度等運動信息,為數(shù)據(jù)分析和步態(tài)識別提供硬件和數(shù)據(jù)基礎(chǔ)。低重力行走時,腳底壓力是人體與地面接觸的唯一物理信息,對空間助力系統(tǒng)行走控制分析有著重要意義,而關(guān)節(jié)角度能夠提供相位的重要信息[16-17],因此需要同步獲得足底壓力和關(guān)節(jié)角度信息。關(guān)節(jié)角度信息通過在膝關(guān)節(jié)和踝關(guān)節(jié)上的編碼器獲得,足底壓力通過在助力系統(tǒng)的鞋底部安裝壓力傳感器獲得。為了能夠準確測量足底交互力大小及其變化,需要將傳感器合理布局。圖4所示為人體在行走時足底壓力分布圖[17],可見腳底與地面的接觸部分主要集中在3個部位,因此,在鞋底與上述相應(yīng)部位配置3個壓力傳感器,雙腳共6個傳感器。
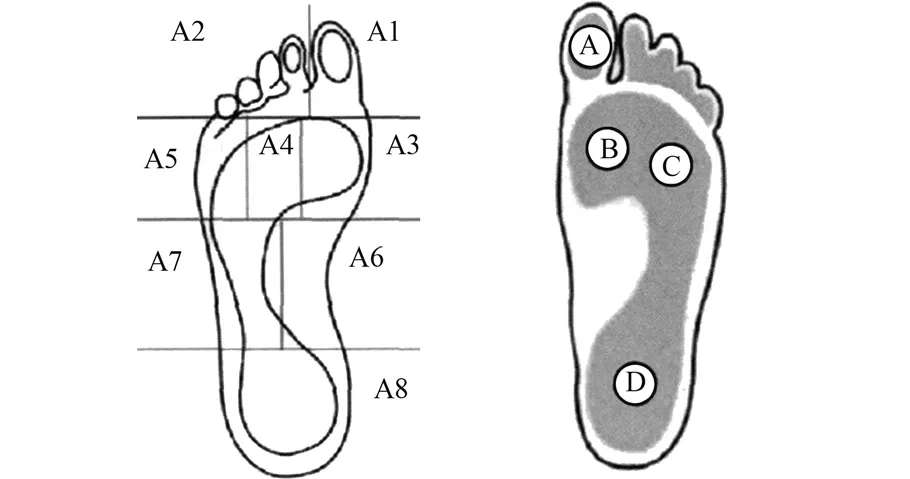
圖4 足底壓力分布Fig.4 Distribution of foot pressure
設(shè)計的同步運動信息采集系統(tǒng)如圖5所示,包括測力鞋(含壓力傳感器)、編碼器、采集板和主控制器(DSP)等部分。足底壓力傳感器的輸出為mV級(滿量程輸出為10 mV),而且信號含有較大噪聲,需要在采集板中設(shè)計調(diào)理電路進行信號放大和濾波處理。采集卡以400 Hz頻率采集傳感器數(shù)據(jù),并將數(shù)據(jù)發(fā)送給主控制器DSP,在DSP中實現(xiàn)對行走步態(tài)的識別。
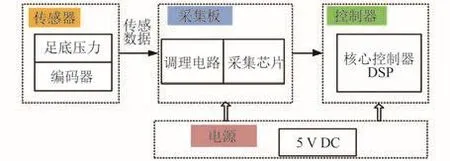
圖5 運動信息采集系統(tǒng)Fig.5 Motion information acquisition system
3.3 模擬低重力下運動特性分析
人體在正常行走時,具有一定的規(guī)律性和準周期性。通常一個步態(tài)周期可定義為從一側(cè)腳跟著地起到同側(cè)腳跟再次著地結(jié)束,其中每條腿可分為支撐相和擺動相[16-17]。支撐相指一側(cè)腳跟著地到腳尖離地的時間,即足部與地面接觸的時間,在地面常重力下約占整個步態(tài)周期的60%~70%;擺動相指一側(cè)腳尖離地到腳跟著地時間,即足部離開地面的時間,約占整個步態(tài)周期的30%~40%。
在模擬低重力下,人體行走基本遵循類似地面常重力行走的規(guī)律性和準周期特性,但是具有一定的差異性。據(jù)文獻[11],人體以3 km/h的低速度行走時,模擬低重力與常重力行走時的步態(tài)周期差異不大,而支撐相比例有大幅度降低,足底壓力有一定比例降低。因此,有必要分析模擬低重力下人體行走的運動特性,并根據(jù)該特性設(shè)計步態(tài)識別算法。
本研究招募了7名健康被試者(年齡29±3.5歲,身高 172.2±8.4 cm,體重 63±3.5 kg),在模擬低重力試驗系統(tǒng)中g(shù)/6重力下,進行了以1.15 m/s(即4.14 km/h)和1.55 m/s(即5.58 km/h)的速度行走試驗。試驗發(fā)現(xiàn),與常重力相比人體行走的周期稍有降低,分別降低8.5%和3.75%。可見,在模擬低重力下,人體行走仍然遵循類似地面常重力行走的規(guī)律性和準周期特性。但是,在1.55 m/s速度行走時,被試可以自由選擇“正常行走”或“帶輕微跳躍行走”,而且被試更自然地選擇后一種行走方式,此時感覺較舒適,步態(tài)周期較常重力下延長46%,支撐相比例縮短43%。
圖6所示為常重力與低重力下,人體運動測試的足底壓力曲線,其中,藍色實線為常重力1.15 m/s步速,藍色虛線為低重力1.15 m/s步速;黑色實線為常重力1.55 m/s步速,黑色虛線為低重力 1.55 m/s步速;紅色實線為低重力1.55 m/s步速帶輕微跳躍的行走模式。可見,低重力下足底壓力的第一個波峰要比常重力下降51.8%(1.15 m/s步速)和55.7%(1.55 m/s步速),第二個波峰已不太明顯,比常重力下降81.4%(1.15 m/s步速)和84.5%(1.55 m/s步速);在1.55 m/s步速時,如果以帶小跳躍方式行走,則只有一個波峰,而足底力峰值降低40.7%。
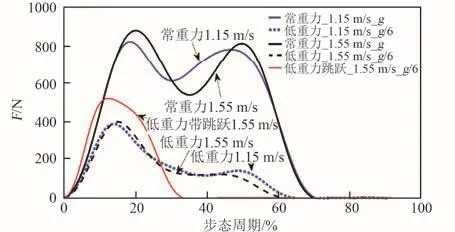
圖6 常重力與模擬低重力下足底壓力對比Fig.6 Comparison of foot pressures between normal and simulated low gravities
4 步態(tài)辨識試驗
本研究將步態(tài)識別算法應(yīng)用于空間助力系統(tǒng)的步態(tài)識別程序設(shè)計。試驗在第3.1節(jié)所述模擬低重力試驗系統(tǒng)進行,被試者著助力系統(tǒng)進行平地行走和上下臺階運動。試驗過程中同步采集步態(tài)識別結(jié)果、足底力、髖踝角度等數(shù)據(jù)。
圖7和圖8所示分別為模擬低重力下1.15 m/s和1.55 m/s平地行走步態(tài)識別結(jié)果。其中,步態(tài)的狀態(tài)“2”表示“左雙支撐”狀態(tài),“1”表示“左單支撐”狀態(tài),“-1”表示“右雙支撐”,“-2”表示“右單支撐”。可見,本研究的方法可在不同行走速度時的步態(tài)辨識結(jié)果具有較好的適應(yīng)性。
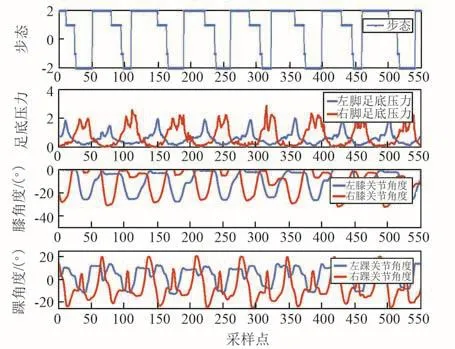
圖7 模擬低重力下1.15 m/s行走步態(tài)識別結(jié)果Fig.7 Gait recognition results of walking at the speed of 1.15 m/s under simulated low gravity
圖9 和圖10分別為模擬低重力下,上臺階和下臺階行走的步態(tài)識別結(jié)果。臺階共有4級,左右腳的重心切換共有5次。在上下臺階行走時,膝關(guān)節(jié)角度要比平地行走時屈曲的角度大,前者達到-70°,后者最大幅度到-35°。
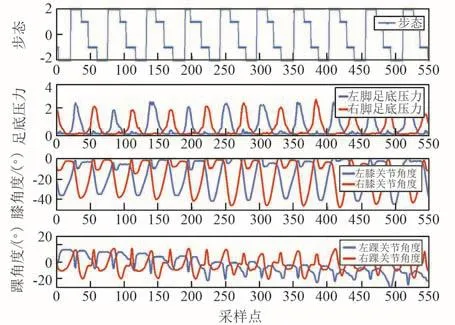
圖8 模擬低重力下1.55 m/s行走步態(tài)識別結(jié)果Fig.8 Gait recognition results of walking at the speed of 1.55 m/s under simulated low gravity
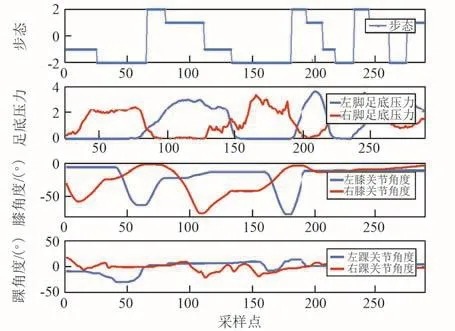
圖9 模擬低重力下上臺階步態(tài)識別結(jié)果Fig.9 Gaitr ecognition results of stairs-up under simulated low gravity
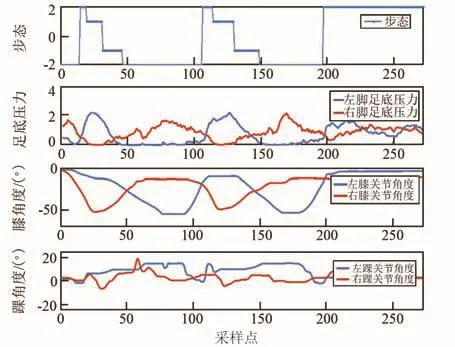
圖10 模擬低重力下下臺階步態(tài)識別結(jié)果Fig.10 Gait recognition results of stairs-down under simulated low gravity
綜上,本研究將所提出的基于數(shù)據(jù)融合的步態(tài)識別方法應(yīng)用于空間助力系統(tǒng)的在線辨識,由實測數(shù)據(jù)可見,本方法能夠適用不同速度下平地行走、上臺階和下臺階的連續(xù)步態(tài)辨識,相位切換連續(xù)、無錯亂,這對助力控制來說尤為重要,相比一般模式識別方法的辨識結(jié)果,可以有效避免系統(tǒng)控制執(zhí)行器的振蕩和誤動作。
5 結(jié)論
本文搭建了低重力模擬系統(tǒng)及其步態(tài)數(shù)據(jù)采集系統(tǒng),基于低重力步態(tài)特性,設(shè)計了基于數(shù)據(jù)融合的辨識方法并進行了模擬低重力環(huán)境的在線辨識試驗,結(jié)果表明可準確及時辨識不同運動模式和行走速度的下肢運動相位,為空間有動力航天服的人機協(xié)同控制提供關(guān)鍵信息。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
科學(xué)大眾(2021年9期)2021-07-16 07:02:40
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
金橋(2020年9期)2020-10-27 01:59:44
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32