工業機器人在禮品盒分揀系統中的應用
2019-04-24 01:20:10王濤
時代農機 2019年2期
關鍵詞:系統
王 濤
(山東工業職業學院,山東 淄博 256414)
隨著科技的發展,工業機器人在各個領域中的應用越來越廣泛。以工業機器人為基礎的禮品盒自動分揀系統代替了人工禮品盒的分揀,自動化程度大大提高了,生產效率明顯提高。
1 禮品盒分揀系統的構建
以工業機器人為基礎的禮品盒自動分揀系統主要由匯博工業機器人、信捷相機、盛有禮品盒的托盤運送流水線組成。托盤流水線靜止時,把不同的禮品盒放在流水線拍照位置,由相機拍照獲取禮品盒的模板數據信息。啟動流水線上料,當禮品盒經過拍照位置時,相機拍照獲取禮品盒信息并與模板禮品盒信息相互比較,把最終數據傳遞給S7-1200PLC,數據經PLC處理后送給工業機器人,由工業機器人完成禮品盒的抓取,當托盤中的禮品盒清空后,機器人抓取托盤放到回收處。禮品盒分揀系統圖如圖1所示。
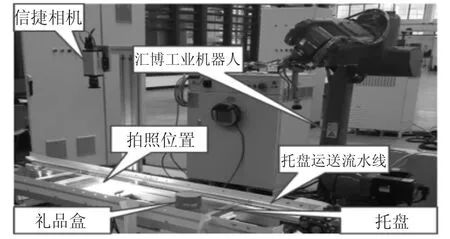
圖1 禮品盒分揀系統
2 工業機器人硬件
系統選用6軸匯博工業機器人,型號是HR20-1700-C10,其主要參數如表1所示。
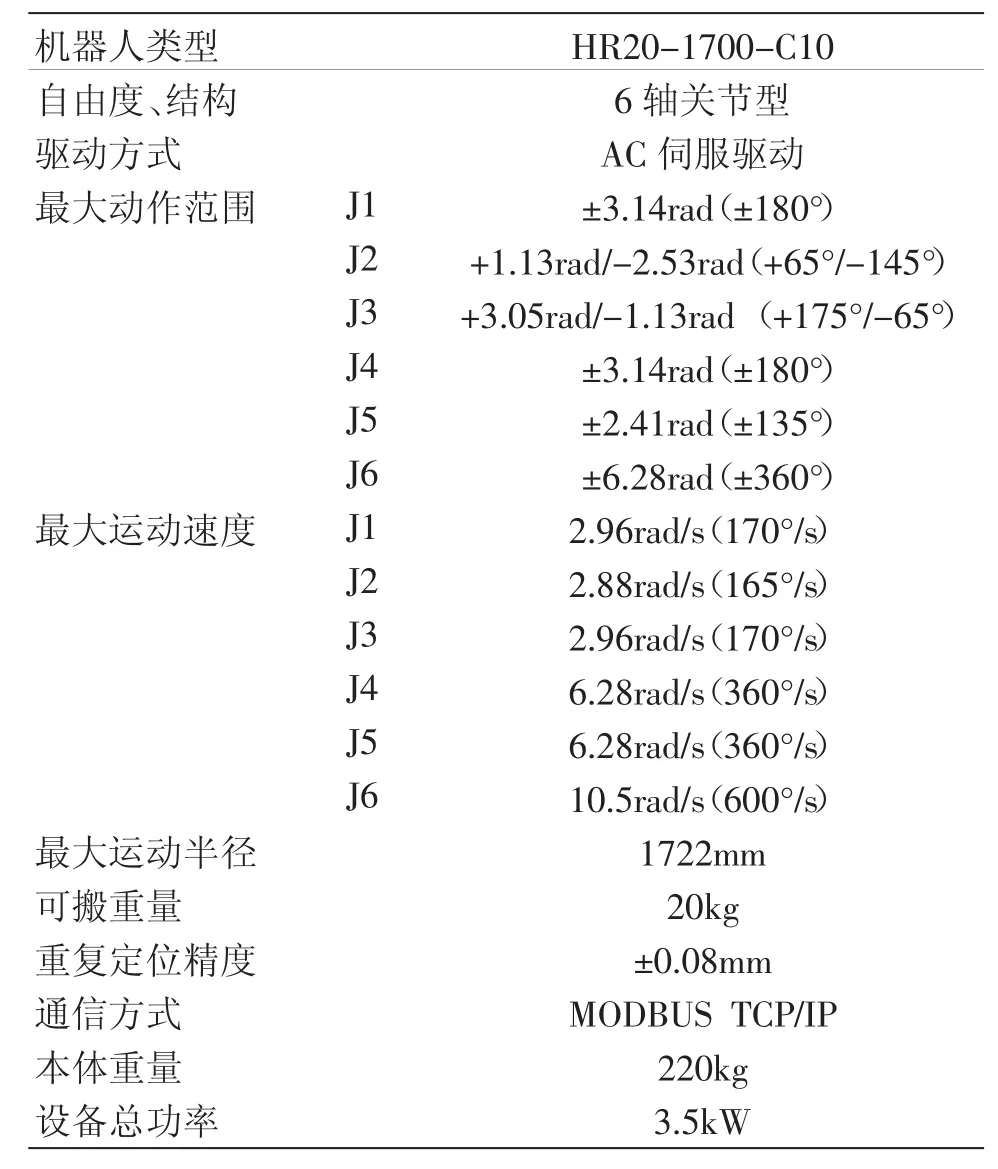
表1 機器人參數
要實現機器人對禮品盒和托盤的抓取,必須在機器人的J6軸(即機器人末端)安裝相應的端拾器,根據實際需要,端拾器由單吸盤(完成禮品盒的抓取)和雙吸盤(完成空托盤的抓取)構成,端拾器如圖2所示。
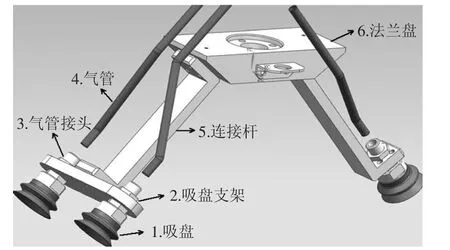
圖2 端拾器
3 工業機器人軟件
機器人的程序編寫、運動、狀態查看、示教等功能都是通過手持示教器完成。匯博HR20-1700-C10型機器人采用的示教器是KeTop,KeTop是KEBA公司專門為工業機器人手持終端提供的硬件解決方案,該手持終端運行KEBA公司自主研發的人機界面軟件TeachView。示教器按鍵如圖3所示。

圖3 示教器按鍵
禮品盒抓取子程序如下:
PICK //禮品盒抓取子程序
PTP(xipan_tool_pos)//切換到禮品盒抓取工具位置
Tool(xipan_tool)//切換到禮品盒抓取工具坐標系
WaitIsFinished()//等待完成
//Lin(inipoint)//抓取坐標偏移基準點(不參與實際動作)
Pickpot:=inipoint//抓取點賦值
Pickpot.x:=inipoint.x-dx_pick//抓取點X軸偏移計算
Pickpot.y:=inipoint.y-dy_pick-laser_offset//抓取點Y軸偏移計算
Pickpot.z:=inipoint.z+dz_pick+100//抓取點 Z 軸偏移計算(增加100mm作為準備點
Wait Is Finished() //等待完成
Lin(pickpot)// 以直線方式運行到抓取準備點
Wait Is Finished() //等待完成
pickpot.z:=pickpot.z-100//減少 100mm 到抓取點
Wait Is Finished() //等待完成
Lin(pickpot,lin300)//以 300cm/min 的速度運行到抓取點
Wait Is Finished() //等待完成
dout24.Set(TRUE)//真空打開
dout26.Set(TRUE)//單吸盤打開
Wait Time(2000) //延時 2 秒
Wait Is Finished() //等待完成
IF xiqu_status.val=TRUE THEN//如果真空檢測為TRUE
pickpot.z :=pickpot.z+100//上升 100mm作為退出點
Wait Is Finished() //等待完成
Lin(pickpot) //運動到退出位置
ELSIF xiqu_status.val=FALSE THEN//如果真空檢測為FALSE
status_robot.val :=300//機器人狀態:300=吸取錯誤
PAUSE//暫停
END_IF
4 結 語
實踐證明,以工業機器人代替人工分揀禮品盒后,提高了生產效率,節約了人工成本。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
