基于模糊控制的輪式移動機器人避障研究
2019-04-22 07:09:44彭緩緩郭毅鋒黃麗敏劉海涵
科技視界 2019年5期
彭緩緩 郭毅鋒 黃麗敏 劉海涵
【摘 要】針對現實生活中未知時變的周圍環境,文章提出了一種基于模糊控制的輪式移動機器人在多個不同性質的障礙物中智能避障的模糊控制方法。通過MATLAB/Simulink仿真軟件搭建了輪式移動機器人運動學模型,以機器人所安裝的環境感知多傳感器所提供的障礙物距離數值以及作為機器人修正姿態參量的實時速度誤差值作為研究參數,對模糊控制器進行了分析研究,其仿真及實測結果表明,文章所設計的模糊控制器可行、有效。
【關鍵詞】輪式移動機器人;模糊控制;避障
中圖分類號:TP242 文獻標識碼: A 文章編號: 2095-2457(2019)05-0059-002
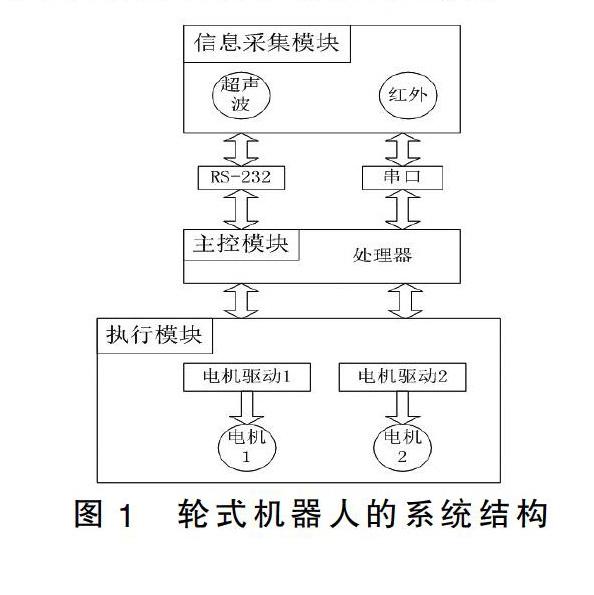
1 輪式機器人的系統結構
輪式移動機器人的執行單元是由底盤前下方的萬向輪和底盤后下方的兩個采用差速轉向式的驅動輪構成,控制系統的設計如圖1所示。控制結構采用模塊化結構,主要有由多個不同種類型號的傳感器完成機器人所處的周圍環境數據的采集、以STM32F407為核心來實現機器人系統的運行控制以及完成機器人的直線和轉向等運行姿態的驅動機構組成。
2 模糊控制避障的實現
2.1 模糊避障系統設計
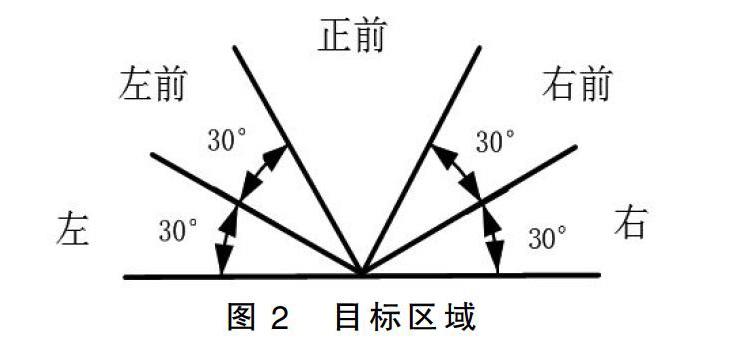
由于機器人避障的決策與其所處環境中雜物的分布有關聯,又為了讓機器人更準確的理解周圍環境,對機器人的正前方180°的目標區域劃分為左、左前、前、右前、右,如圖2所示,模擬機器人機體本身的多傳感器的分布情況,用來實時判斷阻礙物體的相對于機體的坐標。
運用模糊邏輯信息融合算法,把機器人所處環境中的多阻礙物體進行了區域劃分,根據阻礙物的距離數值的不同來設計機器人的運行軌跡,并由控制規則發出執行命令從而實現機器人的位置調整,最后把機器人的姿態位置差量實時反饋給控制器[2],從而實現了避障功能,輪式機器人避障的模糊邏輯結構如圖3所示。
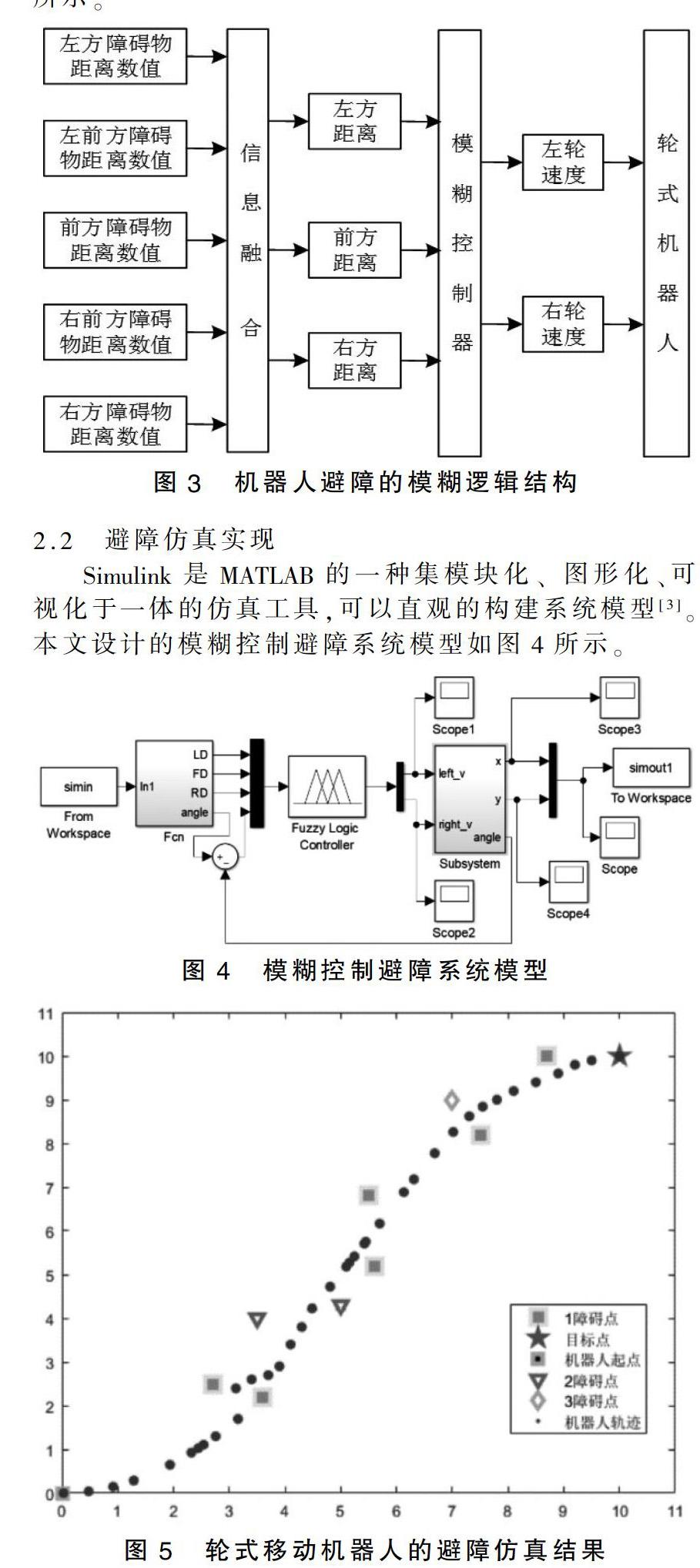
2.2 避障仿真實現
Simulink是MATLAB的一種集模塊化、圖形化、可視化于一體的仿真工具,可以直觀的構建系統模型[3]。本文設計的模糊控制避障系統模型如圖4所示。
以坐標原點(0,0)為初始位置,以(10,10)為終點位置,并在此時環境中隨機的安置多個阻礙物體,把這些信息寫入MATLAB的m文件里。傳感器采集的阻礙物到機器人中心的距離數值LD、FD、RD為模糊控制器的輸入,經過模糊推理輸出的是機器人左、右輪的實時速度。把機器人的運動學理論與機器人所處的實際環境結合起來,通過不斷調整各個模塊參數,進行多次仿真試驗,最后把仿真數據整理后執行畫圖命令,即得到如圖5所示的輪式移動機器人的避障仿真結果。從圖中可以看出,當機器人遇到阻礙前行的物體時,其能夠靈活的轉變一定的角度來避開阻礙物并到達指定的目標地點處。
3 機器人樣機測試
對輪式移動機器人進行實物避障實驗測試,如圖6所示。在機器人的右前方(由里指向外)依次擺放兩個障礙物,第一個障礙物位于機器人正前方的位置,由于障礙物的右側是一面墻壁,所以此時的機器人就微微的緩慢的向左偏移一定的角度來避開第一個障礙物;當移動到兩個障礙物之間時,由于機器人此時所處在兩個障礙物中間偏左一點,而機器人的右邊是一面墻,所以此時機器人依然要向左稍微偏移一定的角度,最終越過兩個障礙物達到指定的目標位置而停止移動。
4 結論
從輪式機器人實物圖的避障結果可以看出,在存在多個不同材質形狀障礙物的情況下,移動機器人能夠靈活微調自身姿態避開阻礙前行的物體前進,并最終到達給定終點位置。實驗結果表明,文章所設計的避障模糊控制器可行、有效,且具有相當的精確性,達到了預期設計目的。
【參考文獻】
[1]楊小菊,張偉,高宏偉,米海山.基于模糊控制的移動機器人避障研究[J].傳感器與微系統,2017,36(03):51-54.
[2]Abiyev R H , Günsel, Irfan S, Akkaya N , et al. Fuzzy control of omnidirectional robot[J]. Procedia Computer Science, 2017, 120:608-616.
[3]蘇衍保.基于多傳感器信息融合的迎賓機器人避障問題研究[D].山東科技大學,2017.