基于WebGL的三維GIS空間算法的研究與實(shí)現(xiàn)
2019-04-15 06:54:10王星捷衛(wèi)守林
計(jì)算機(jī)應(yīng)用與軟件 2019年4期
王星捷 衛(wèi)守林
1(核工業(yè)西南物理研究院 四川 成都 610041) 2(成都理工大學(xué)工程技術(shù)學(xué)院 四川 樂山 614007) 3(昆明理工大學(xué)信息工程與自動(dòng)化學(xué)院 云南 昆明 650093)
0 引 言
當(dāng)前多數(shù)的Web端的GIS平臺主要以二維的為主,許多成熟的三維GIS平臺,都已經(jīng)開發(fā)成產(chǎn)品,不僅加載Web三維場景地圖大多需要下載額外的插件來實(shí)現(xiàn),而且需要昂貴的平臺使用費(fèi)用。WebGL技術(shù)[1]可以直接利用硬件來渲染三維場景,不用下載額外的插件。現(xiàn)在雖然有許多關(guān)于利用WebGL技術(shù)來渲染[2]三維GIS場景的研究論文,但實(shí)現(xiàn)效果不太理想,大多只提供場景模型加載功能,沒有具體的二維地圖矢量數(shù)據(jù)的支撐,不能進(jìn)行空間分析。而且只能實(shí)現(xiàn)單一的三維場景[3],不能實(shí)現(xiàn)與二維數(shù)據(jù)的聯(lián)動(dòng)等多方面的空間功能。
目前瀏覽器對WebGL提供支持,在未來WebGL與地理信息服務(wù)技術(shù)相結(jié)合是發(fā)展的趨勢。本文基于Web Graphics Library(WebGL)結(jié)合Geographic Informatica Service(地理信息服務(wù))對三維數(shù)字城市技術(shù)進(jìn)行了深入研究,設(shè)計(jì)了一套基于WebGL開發(fā)三維GIS的技術(shù)[4],充分利用了WebGL與ArcGIS Server的結(jié)合,方便地實(shí)現(xiàn)了三維編輯、三維查詢[5]和三維分析等功能。由于三維模型[6]和三維場景的復(fù)雜性[7],在實(shí)現(xiàn)的過程中出現(xiàn)了一些問題:(1) 系統(tǒng)在平移和旋轉(zhuǎn)時(shí),二維空間數(shù)據(jù)處理和三維模型的顯示發(fā)生了位移,沒有保持空間信息的同步;(2) 實(shí)現(xiàn)路徑分析數(shù)據(jù)三維體現(xiàn)時(shí),軌跡顯示效果差;(3) 在實(shí)現(xiàn)二、三維視圖切換,鷹眼滑動(dòng),三維漫游以及三維場景旋轉(zhuǎn)時(shí),發(fā)現(xiàn)旋轉(zhuǎn)控制效果不理想,出現(xiàn)了偏移,坐標(biāo)發(fā)生錯(cuò)位。
針對上述的問題,本文重點(diǎn)研究和分析了二、三維空間數(shù)據(jù)同步算法,三維對象運(yùn)動(dòng)軌跡處理算法和三維漫游處理算法。
1 二、三維空間數(shù)據(jù)同步算法
二、三維空間數(shù)據(jù)同步是三維GIS空間分析的基本功能,基本原理是將二維空間數(shù)據(jù)與三維模型通過空間坐標(biāo)進(jìn)行同步的顯示。在小范圍的數(shù)據(jù)中,可以通過坐標(biāo)實(shí)現(xiàn)同步,而面對較大的三維模型和二維空間數(shù)據(jù)時(shí),當(dāng)進(jìn)行三維操作時(shí),二、三維出現(xiàn)明顯的坐標(biāo)偏差和錯(cuò)位,當(dāng)進(jìn)行漫游和旋轉(zhuǎn)時(shí),情況會(huì)更為嚴(yán)重。
為了讓二維空間數(shù)據(jù)與三維模型數(shù)據(jù)的同步[8]顯示,在通過空間坐標(biāo)綁定的基礎(chǔ)上,結(jié)合在二維空間數(shù)據(jù)的map對象中的地圖范圍變化事件中綁定三維場景的相機(jī)同步控制函數(shù)。三維模型顯示二維數(shù)據(jù)需要對相機(jī)進(jìn)行控制,實(shí)現(xiàn)的過程比較復(fù)雜。本文對二維空間數(shù)據(jù)控制三維場景相機(jī)的位置進(jìn)行了算法計(jì)算。
在三維場景的使用的相機(jī)為透視投影相機(jī)[9],因?yàn)橄鄼C(jī)視野中的物體尺寸會(huì)隨著與相機(jī)的距離變遠(yuǎn)而變小,更接近于人眼觀察的效果,所以選用透視投影相機(jī)會(huì)達(dá)到更加逼真的效果。透視相機(jī)原理如圖1所示。
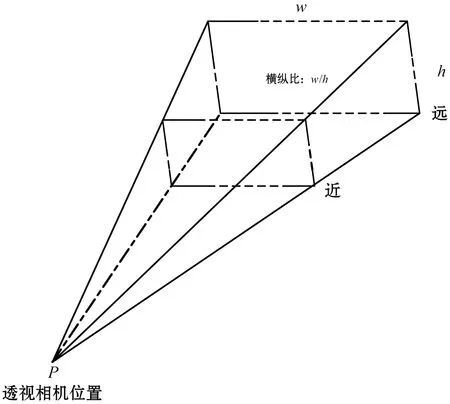
圖1 透視相機(jī)的觀察事物的原理
二維空間數(shù)據(jù)中的展示的地圖相當(dāng)于三維場景的地面,為了保證相機(jī)俯視時(shí)看到的效果能與二維地圖顯示范圍一致,必須保證網(wǎng)頁中放置map對象的控件元素和Three.js的三維場景scene控件容器元素的長寬比例w/h保持一致。當(dāng)二維地圖顯示范圍與scene控件顯示的地圖范圍一致時(shí),假設(shè)相機(jī)的位置為P,相機(jī)的視角為θ,此時(shí)地面范圍的寬度W與相機(jī)高度H的關(guān)系如圖2所示。
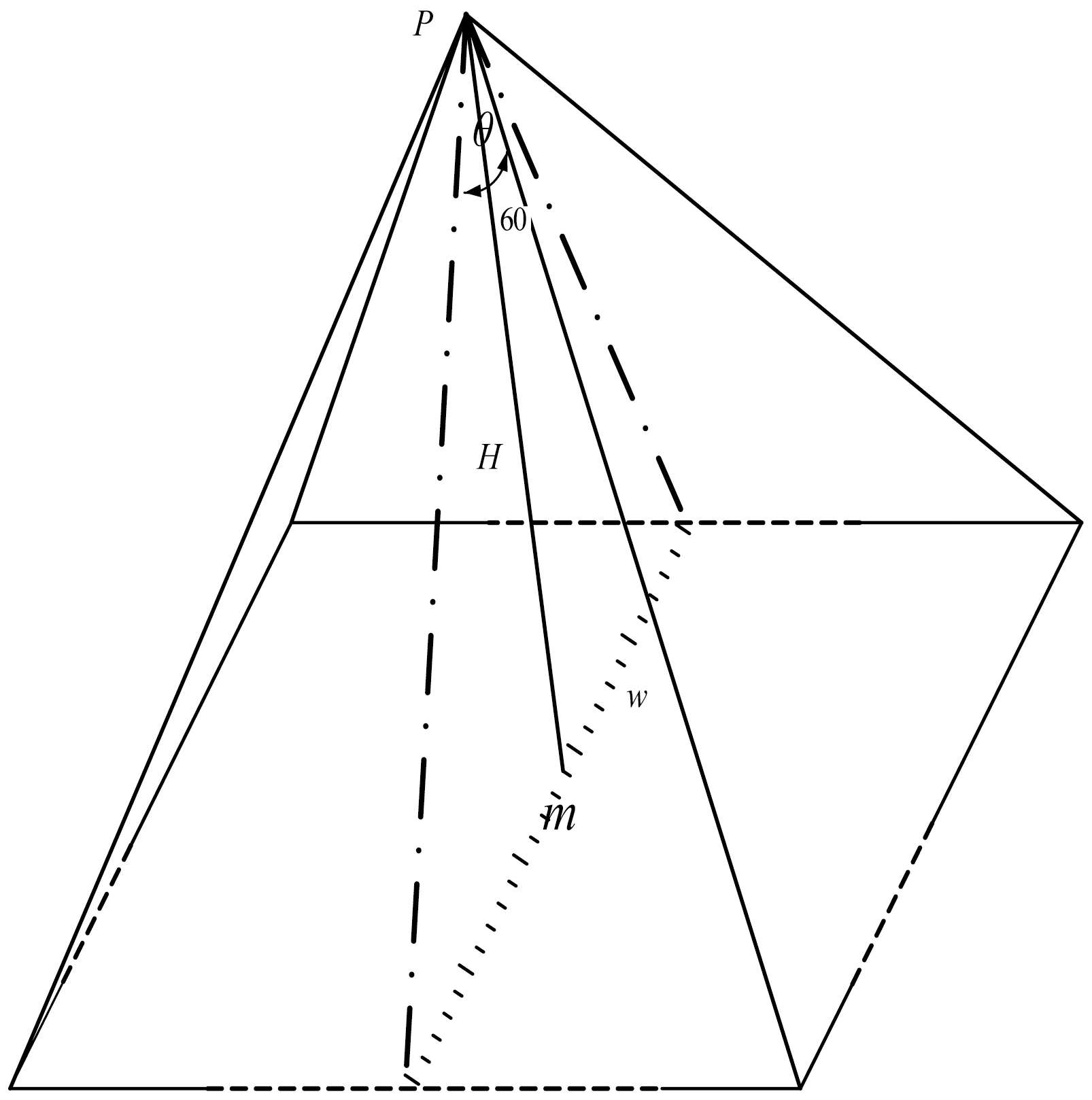
圖2 根據(jù)地圖范圍確定相機(jī)位置
WebGL場景使用的是右手坐標(biāo)系,Y軸向上。為了方便計(jì)算,將WebGL場景中的XZ坐標(biāo)作為的經(jīng)緯度坐標(biāo)的映射。m(Xm,0,Zm)點(diǎn)為地圖范圍的中心點(diǎn),同時(shí)也是相機(jī)位置P點(diǎn)在地面上的投影點(diǎn)。通過二維地圖map控件可以獲取到當(dāng)前顯示的二維地圖的地理坐標(biāo)范圍,再經(jīng)過坐標(biāo)轉(zhuǎn)換得到場景坐標(biāo)的范圍為:
((Xmin,Zmin),(Xmax,Zmax))
可以得到范圍中心點(diǎn)的坐標(biāo)為:
P點(diǎn)坐標(biāo)的計(jì)算公式如下:
(1)
(2)
H、W的計(jì)算公式如下:
(3)
W=Zmax-Zmin
(4)
最終計(jì)算得到相機(jī)位置為:
當(dāng)三維模型視圖與二維空間數(shù)據(jù)同步時(shí),需要將場景中的相機(jī)移動(dòng)到P點(diǎn)位置并向朝向Y軸負(fù)方向。
二、三維空間數(shù)據(jù)的同步,可以方便將ArcGIS Server服務(wù)中的二維地圖查詢、緩沖查詢、編輯、鄰近設(shè)施分析等功能移植到三維視圖,是實(shí)現(xiàn)三維數(shù)字城市基本功能的基本。
2 三維對象運(yùn)動(dòng)軌跡處理算法
物體的運(yùn)動(dòng)軌跡主要來自于路徑分析結(jié)果和二、三維空間數(shù)據(jù)同步時(shí)相機(jī)的運(yùn)動(dòng)軌跡。這些軌跡都是由分布不均的點(diǎn)集生成的折線,需要對軌跡線進(jìn)行插值算法分析,使得到的軌跡變得平滑,使物體運(yùn)動(dòng)起來更加平緩。本文對運(yùn)動(dòng)軌跡進(jìn)行插值時(shí)分別采用了樣條函數(shù)插值法和CatmullRom樣條函數(shù)插值法,對物體的運(yùn)動(dòng)軌跡進(jìn)行插值和對比。CatmullRom樣條函數(shù)[10]與普通樣條函數(shù)的圖解如圖3所示。
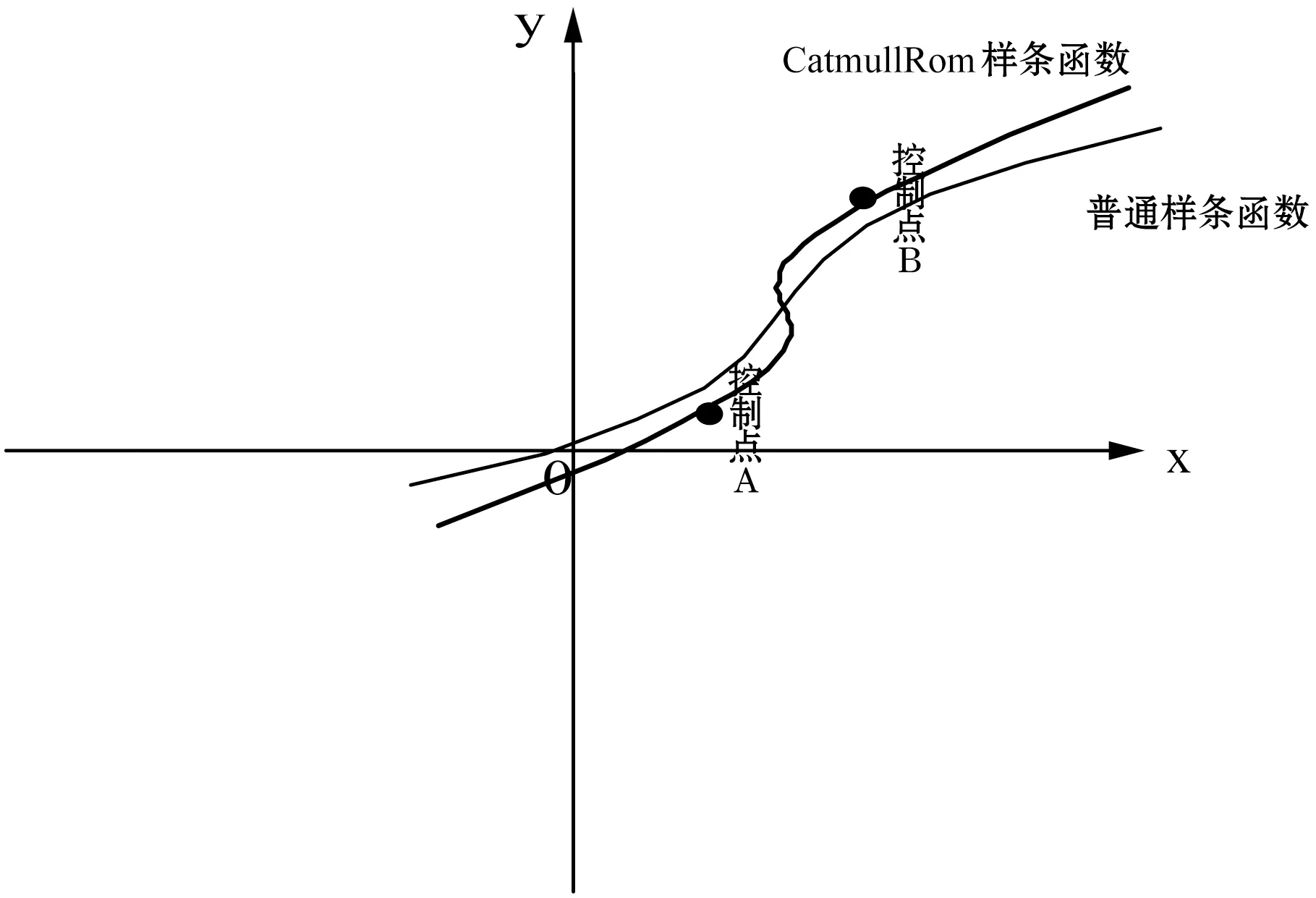
圖3 CatmullRom樣條函數(shù)與普通樣條函數(shù)對比
可以看出一般的樣條函數(shù)生成的曲線只會(huì)接近控制點(diǎn),不會(huì)穿過控制點(diǎn),CatmullRom樣條函數(shù)會(huì)穿過每一個(gè)控制點(diǎn),而三維路徑分析和漫游需要經(jīng)過每一個(gè)道路線的拐點(diǎn)(控制點(diǎn)),所以選用CatmullRom樣條函數(shù)來對物體的運(yùn)動(dòng)軌跡進(jìn)行插值。
插值完成后得到路徑為一條平滑的曲線,這時(shí)只需在場景渲染時(shí)的每一幀讀取樣條函數(shù)上對應(yīng)的坐標(biāo)點(diǎn)坐標(biāo),再將移動(dòng)的物體的坐標(biāo)設(shè)置為讀取到的坐標(biāo),每一幀都執(zhí)行此操作,就可以實(shí)現(xiàn)物體在場景中按照插值軌跡的進(jìn)行平滑的移動(dòng)。
3 三維漫游處理算法
三維漫游無非是平移、縮放、旋轉(zhuǎn)等操作,而旋轉(zhuǎn)是實(shí)現(xiàn)三維運(yùn)動(dòng)處理的關(guān)鍵的部分。旋轉(zhuǎn)的過程是物體從初始狀態(tài),經(jīng)歷旋轉(zhuǎn),達(dá)到結(jié)束狀態(tài)。在三維空間中控制物體旋轉(zhuǎn)有三種方式:歐拉角[11]、旋轉(zhuǎn)矩陣和四元數(shù)[12]。
歐拉角:這是最直觀也最容易理解的旋轉(zhuǎn)表達(dá)方式,物體從初始狀態(tài)到結(jié)束狀態(tài)可以將物體分別繞x、y、z軸按順序旋轉(zhuǎn)不同的角度完成。一共用三個(gè)旋轉(zhuǎn)值和一個(gè)旋轉(zhuǎn)順序表示:
(x,y,z,order)
其中,x、y、z分別表示物體繞x、y、z軸旋轉(zhuǎn)的角度。order表示三次旋轉(zhuǎn)的順序。當(dāng)用歐拉角控制[13]對象旋轉(zhuǎn)時(shí)其實(shí)需要將物體繞三個(gè)坐標(biāo)軸的三次旋轉(zhuǎn),并且如果旋轉(zhuǎn)的順序不同得到的結(jié)果也不相同,一個(gè)歐拉角的參數(shù)中包含繞三個(gè)坐標(biāo)軸旋轉(zhuǎn)的角度和三次旋轉(zhuǎn)的順序四個(gè)參數(shù)。除了三次旋轉(zhuǎn)中兩次為零情況,直接進(jìn)行線性插值無法得到線性旋轉(zhuǎn)軌跡,也就是說當(dāng)相機(jī)按得到的旋轉(zhuǎn)軌跡旋轉(zhuǎn)時(shí)可能會(huì)出現(xiàn)抖動(dòng)的現(xiàn)象,出現(xiàn)這種情況的原因被稱之為萬向節(jié)鎖。
旋轉(zhuǎn)矩陣:其實(shí)無論經(jīng)歷怎樣的旋轉(zhuǎn)物體都可以通過繞一個(gè)特定的旋轉(zhuǎn)軸按一定方向旋轉(zhuǎn)一定角度來達(dá)到結(jié)束狀態(tài)。也就是繞一個(gè)向量旋轉(zhuǎn)一個(gè)角度,但是旋轉(zhuǎn)矩陣中變化參數(shù)比較多,對于計(jì)算和控制狀態(tài)并不是那么容易。
四元數(shù):四元數(shù)描述旋轉(zhuǎn)的原理和旋轉(zhuǎn)矩陣類似[14],區(qū)別就是四元數(shù)就引入了復(fù)數(shù)的思想,對復(fù)數(shù)進(jìn)行了延伸,可以把它看成一個(gè)四維復(fù)數(shù),同樣將一個(gè)旋轉(zhuǎn)軸和一個(gè)繞它變化的角度進(jìn)行變形,使之成為一個(gè)四元數(shù),一共有四個(gè)值。這樣可以遵循復(fù)數(shù)的運(yùn)算,包括加減乘除以及積分等等。
使用四元數(shù)法控制物體旋轉(zhuǎn)時(shí)物體只需進(jìn)行一次旋轉(zhuǎn),所有的旋轉(zhuǎn)是繞著一條直線旋轉(zhuǎn)一定角度。只要指定好這條直線,再指定一個(gè)角度即可控制物體的旋轉(zhuǎn)。一個(gè)四元數(shù)需要的參數(shù)有三個(gè)直線表達(dá)式和旋轉(zhuǎn)的角度值,共含四個(gè)參數(shù)。四元數(shù)旋轉(zhuǎn)坐標(biāo)表示如下:
{x:kx×sin(a/2),y:ky×sin(a/2),
z:kz×sin(a/2),w:cos(a/2)}
其中,a代表繞軸(kx,ky,kz)旋轉(zhuǎn)的角度),轉(zhuǎn)換成復(fù)數(shù)形式為:
cos(a/2)+(kx×sin(a/2))i+(ky×sin(a/2))j+
(kz×sin(a/2))k
這里的i、j、k表示虛數(shù)單位,僅僅代表他們分別處于不同的維度,不代表具體值。這樣以來就可以實(shí)現(xiàn)對旋轉(zhuǎn)進(jìn)行疊加、加速等效果的控制,計(jì)算起來比歐拉角(三次旋轉(zhuǎn)的合成)和旋轉(zhuǎn)矩陣(四元數(shù)變形的更多的變量的矩陣形式)更加簡單[15]。
通過上面的解釋,四元數(shù)的表達(dá)式可分解為kx、ky、kz、angle,設(shè)角度a為angle。而歐拉角的表達(dá)式無法分解,設(shè)它的表達(dá)式為(x,y,z,‘xyz’),‘xyz’只表示順序不表示數(shù)值,因?yàn)槿齻€(gè)參數(shù)都是角度值,具有實(shí)際意義無法分解,那么參數(shù)有三個(gè),設(shè)置讓三位場景中的物體繞指定向量勻速旋轉(zhuǎn),旋轉(zhuǎn)過程如圖4所示。
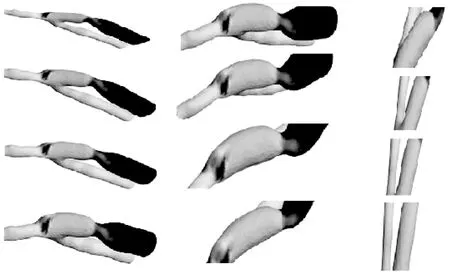
圖4 測試對象x,y,z軸的旋轉(zhuǎn)狀態(tài)
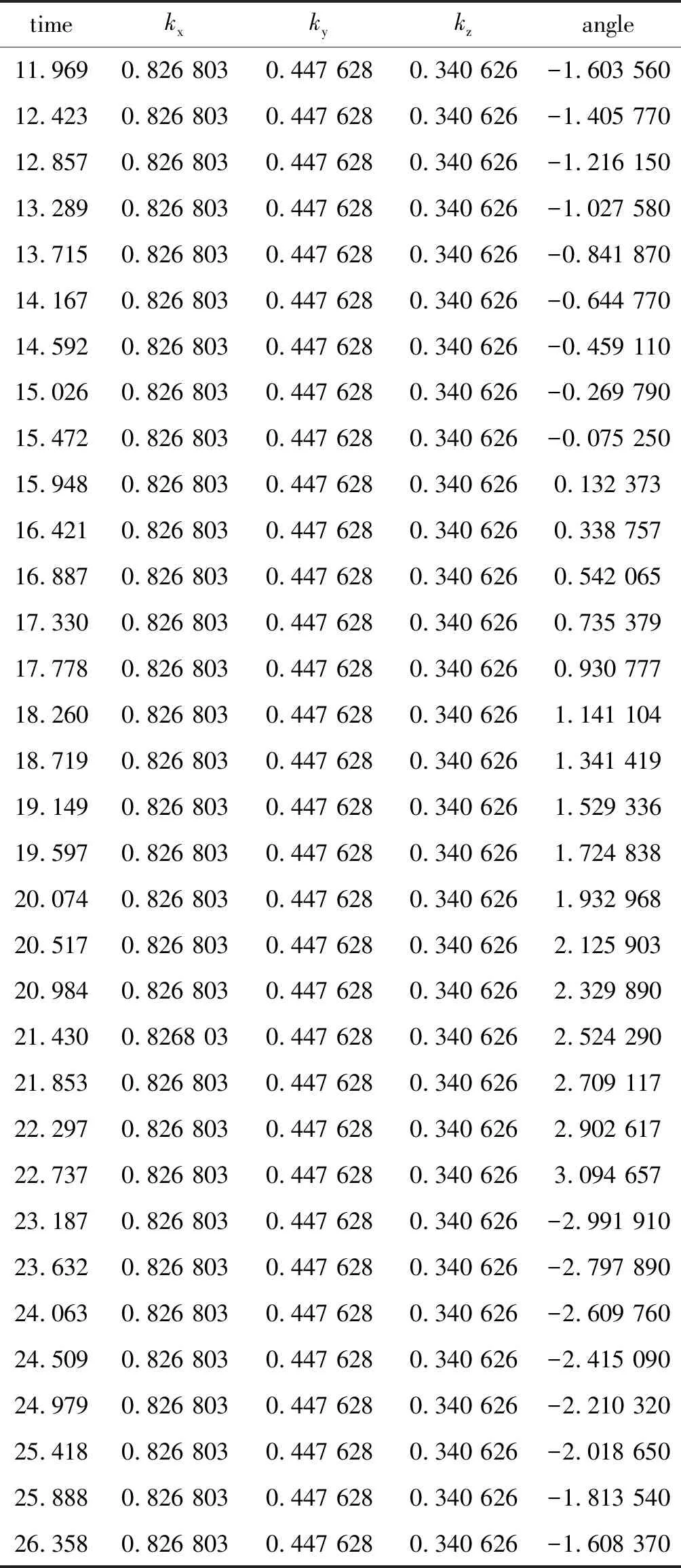
以下四元數(shù)表達(dá)式各參數(shù)和歐拉角表達(dá)式各參數(shù)數(shù)據(jù)采集自該對象繞單位向量(0.826 803,0.447 628,0.340 626)勻速旋轉(zhuǎn)一周的不同時(shí)間點(diǎn)采集到的參數(shù)數(shù)值。如表1、表2所示。
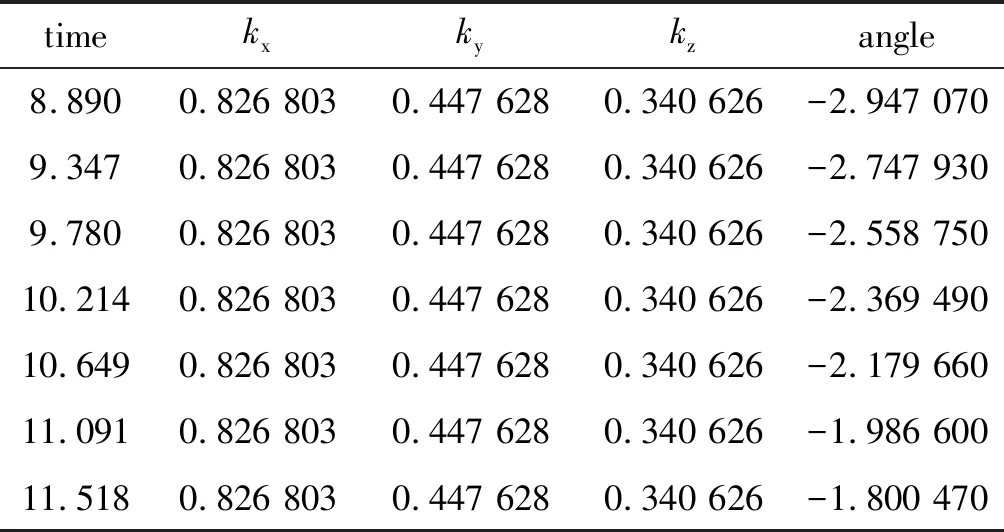
表1 四元數(shù)表達(dá)式各參數(shù)的在旋轉(zhuǎn)中的數(shù)值
續(xù)表1
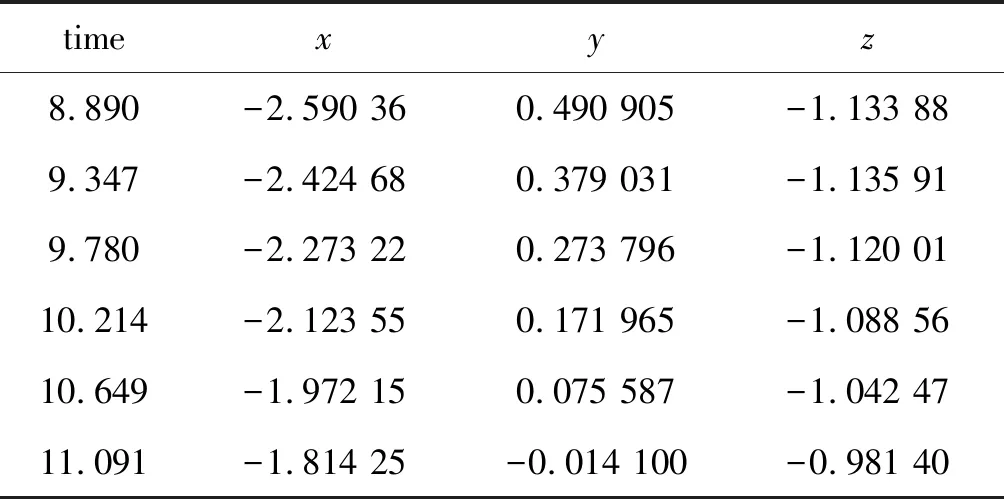
表2 歐拉角表達(dá)式各參數(shù)的在旋轉(zhuǎn)中的數(shù)值
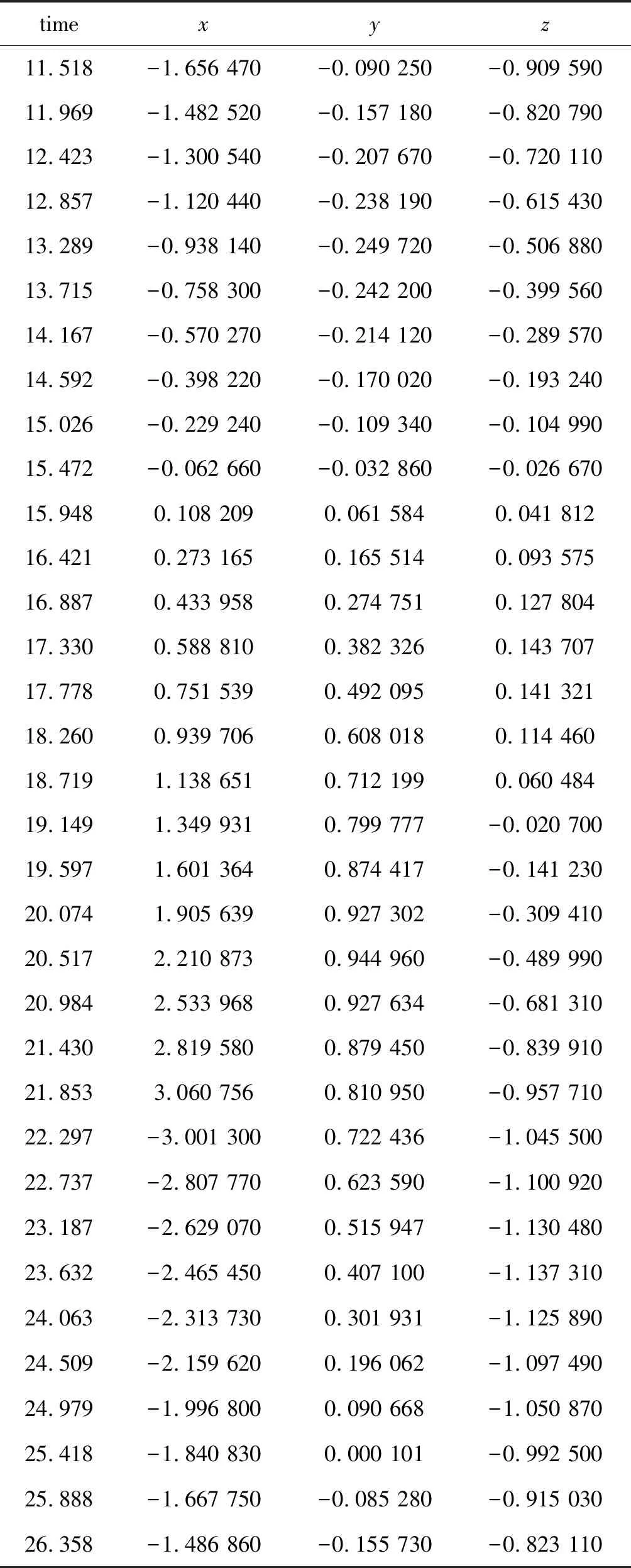
續(xù)表2
從表1、表2中的數(shù)據(jù)可以看出,從初始到結(jié)束狀態(tài)四元數(shù)表達(dá)式和歐拉角表達(dá)式各個(gè)參數(shù)值的變化情況,四元數(shù)表達(dá)式參數(shù)中只有一個(gè)角度angle在呈線性變化,而歐拉角的三個(gè)參數(shù)都在同時(shí)進(jìn)行變化,但是變化規(guī)律并不統(tǒng)一。將表1、表2中的數(shù)據(jù)繪制成數(shù)值變化圖,如圖5所示。
從圖5中很直觀分析出,四元數(shù)可以通過對角度參數(shù)進(jìn)行簡單的線性插值就可以實(shí)現(xiàn)旋轉(zhuǎn)控制,而使用歐拉角表達(dá)式來控制物體旋轉(zhuǎn)狀態(tài)卻不能用簡單的線性差值來實(shí)現(xiàn),如果要使用歐拉角來控制旋轉(zhuǎn),那么就要分別求出每一個(gè)xyz每次旋轉(zhuǎn)角度的變化規(guī)律,顯然復(fù)雜程度比四元數(shù)高出了很多。
上述的數(shù)據(jù)只是簡單的繞一根軸勻速旋轉(zhuǎn),是最簡單的旋轉(zhuǎn)過程,即使是最簡單的旋轉(zhuǎn)過程也很難使用歐拉角表達(dá)式通過特定的差值規(guī)則來控制旋轉(zhuǎn),其實(shí)物體在實(shí)際情景下的旋轉(zhuǎn)過程是多方位的旋轉(zhuǎn),在轉(zhuǎn)動(dòng)過程中并不只是在繞某一個(gè)旋轉(zhuǎn)軸勻速旋轉(zhuǎn),而是不斷在改變旋轉(zhuǎn)軸和速度。截取一個(gè)盡可能短的時(shí)間段,可以把這個(gè)時(shí)間段的旋轉(zhuǎn)近似看成不變的,可以使用四元數(shù)表達(dá)式和歐拉角來表達(dá)此時(shí)的旋轉(zhuǎn),這個(gè)動(dòng)作就可以看成旋轉(zhuǎn)軸在不斷旋轉(zhuǎn),旋轉(zhuǎn)速度不斷變化的旋轉(zhuǎn)組合,同時(shí)把這些旋轉(zhuǎn)看成旋轉(zhuǎn)軸也在不停地旋轉(zhuǎn)。使用四元數(shù)表示旋轉(zhuǎn),可以使用四元數(shù)特有的加減乘除運(yùn)算法則來計(jì)算出每個(gè)時(shí)段旋轉(zhuǎn)的四元數(shù)最終表達(dá),在三維場景中使用這個(gè)最終表達(dá)來設(shè)置物體在對應(yīng)時(shí)段的旋轉(zhuǎn)狀態(tài),就可以達(dá)到對物體旋轉(zhuǎn)的很好控制,可以對四元數(shù)運(yùn)用一些現(xiàn)有的插值算法來控制物體平滑旋轉(zhuǎn)。而歐拉角并不能夠像四元數(shù)這樣找出規(guī)律并應(yīng)用運(yùn)算規(guī)則,旋轉(zhuǎn)中,歐拉角三個(gè)值都在不停變換,僅僅表示一個(gè)旋轉(zhuǎn)狀態(tài),用來描述和控制物體旋轉(zhuǎn)過程很難找出其特定的規(guī)律。
與歐拉角相比四元數(shù)描述旋轉(zhuǎn)的優(yōu)勢如下:插值結(jié)果為線性軌跡,沒有萬向節(jié)鎖,具有唯一表達(dá)式。而歐拉角旋轉(zhuǎn)順序不同會(huì)有多種不同的表達(dá)式。
選用四元數(shù)法來控制物體的旋轉(zhuǎn),只需要對物體的旋轉(zhuǎn)狀態(tài)和最終旋轉(zhuǎn)狀態(tài)的四元數(shù)表達(dá)式進(jìn)行線性插值,場景在渲染每一幀時(shí)為物體應(yīng)用每一個(gè)插值點(diǎn)的四元數(shù)變換,就能保證物體旋轉(zhuǎn)的平滑過渡。
4 實(shí)驗(yàn)與分析
本文測試的數(shù)據(jù)是一個(gè)某小城市的數(shù)據(jù),范圍大小為10平方公里,模型數(shù)量超過5 000個(gè),其中矢量面拉伸生成的模型1 421個(gè),導(dǎo)入外部模型3 600多個(gè),按平臺設(shè)計(jì)需要還包含每個(gè)建筑物的高程數(shù)據(jù)、模型參數(shù)(路徑、大小、旋轉(zhuǎn))、道路寬度、建筑物名稱等必要屬性數(shù)據(jù)。
(1) 二、三維空間數(shù)據(jù)同步分析 利用二、三維空間數(shù)據(jù)同步算法計(jì)算出二維地圖當(dāng)前顯示范圍的場景中相機(jī)對應(yīng)的位置,同時(shí)利用三維對象運(yùn)動(dòng)控制算法對相機(jī)的運(yùn)動(dòng)過程進(jìn)行插值計(jì)算。讓場景中的相機(jī)能夠動(dòng)畫過渡到根據(jù)二維地圖顯示范圍計(jì)算出的相機(jī)位置。從而實(shí)現(xiàn)視圖同步。二、三維視圖同步效果如圖6所示。
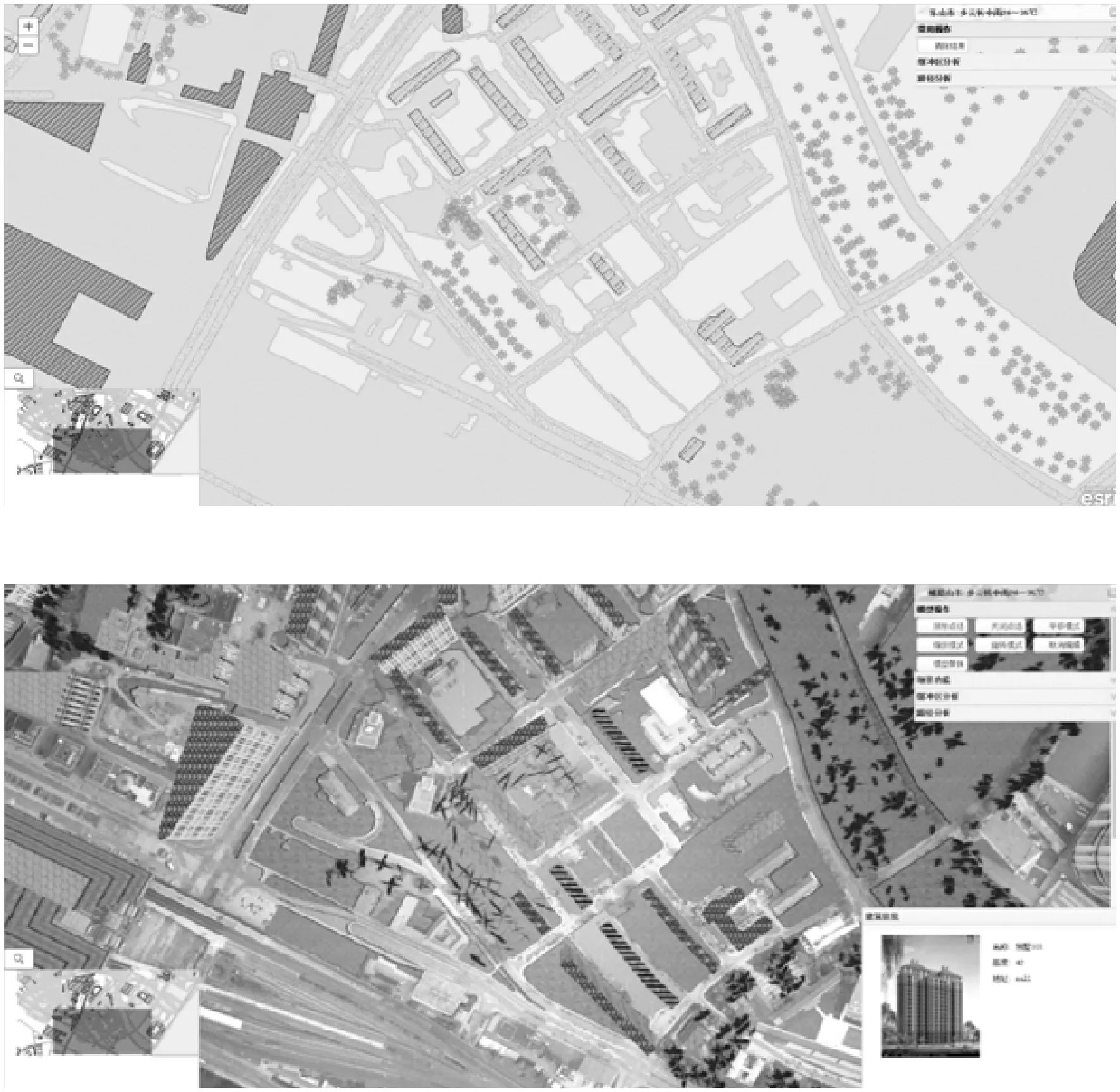
圖6 二、三維空間數(shù)據(jù)同步效果
(2) 運(yùn)動(dòng)軌跡分析對比 用路徑分析生成的路線來測試運(yùn)動(dòng)軌跡,圖5中展示了采用普通樣條插值處理和CatmullRom樣條插值處理的不同效果。從圖7(a)中可以看出,普通樣條插值處理的效果,體現(xiàn)為折線,特別是在轉(zhuǎn)角處的處理比較粗糙,沒有完全經(jīng)過控制點(diǎn),只是接近。從圖7(b)中可以看出,CatmullRom樣條插值處理的效果較好,體現(xiàn)了平滑的路徑曲線,并且通過了每一個(gè)路徑坐標(biāo)控制點(diǎn)。
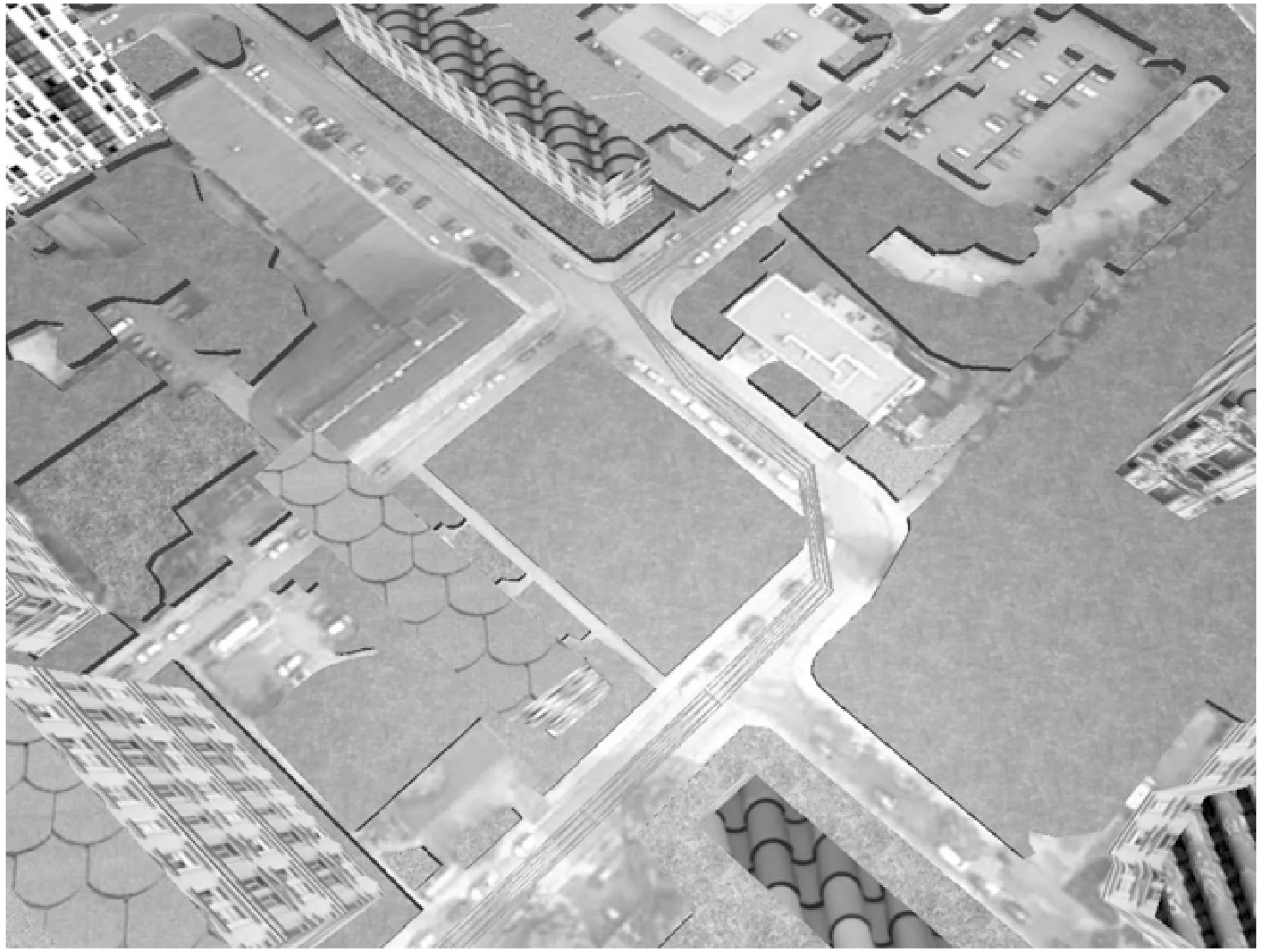
(a) 普通樣條插值處理
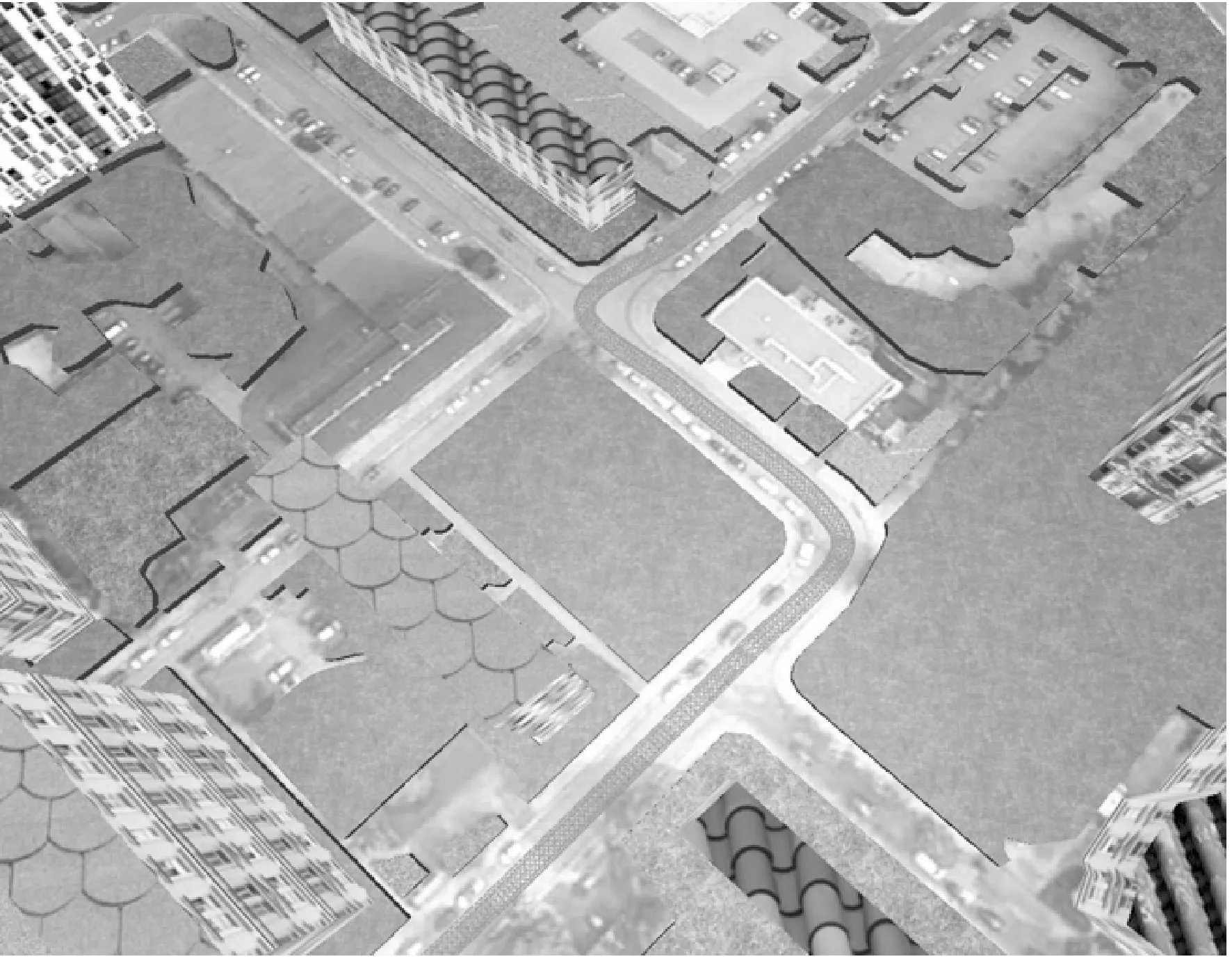
(b) CatmullRom樣條插值處理圖7 三維對象運(yùn)動(dòng)軌跡處理效果
5 結(jié) 語
本文在基于WebGL的實(shí)現(xiàn)三維GIS技術(shù)基礎(chǔ)上,對二、三維空間數(shù)據(jù)同步算法、三維對象運(yùn)動(dòng)軌跡處理算法和三維漫游處理算法進(jìn)行了分析和研究。 分析了二、三維視圖同步算法的原理,并設(shè)計(jì)了對應(yīng)的模型和算法;分析和研究了軌跡處理的算法;詳細(xì)分析了三維漫游處理算法和實(shí)現(xiàn)過程。最終通過實(shí)驗(yàn)分析和數(shù)據(jù)對比,證明了本文設(shè)計(jì)和研究算法的科學(xué)性,同時(shí)通過展示的效果,證明了本文研究的場景控制算法達(dá)到了預(yù)計(jì)的效果。本文研究的三維視圖算法具有實(shí)際應(yīng)用和研究的價(jià)值,實(shí)現(xiàn)的技術(shù)為三維數(shù)字城市的開發(fā)提供了技術(shù)參考和理論依據(jù)。