電動汽車主動懸架控制系統設計與仿真
2019-04-10 02:26:22宋森楠
汽車零部件 2019年3期
宋森楠
(寧波工程學院機械工程學院,浙江寧波 315211)
0 引言
由于電動汽車使用清潔能源,可有效改善因汽車尾氣排放帶來的環境污染,因此使用越來越廣泛,近年來其市場投放量越來越大,發展勢頭良好[1]。但是,與傳統內燃機汽車不同的是,電動汽車動力電池組易受到外界因素干擾,車身平順性將對電池組的使用壽命和安全性產生重大影響[2]。GB/T 31486-2015規定,動力電池組在振動試驗當中,不能產生電流的銳變或者電壓異常,不出現外殼破損,無電解液的泄漏,結構完整無缺[3]。
目前,大多數電動汽車仍然采用被動懸架,其對汽車平順性的優化效果有限,無法根據不同路況做出調整;而主動懸架可以根據各路況改變其懸架剛度和阻尼系數,使汽車在任何條件下都能獲得最好的平順性[4-5]。
主動懸架的控制算法包括自適應控制、PID控制、模糊控制、神經網絡控制等,其中模糊控制具備良好的魯棒性和控制精度,同時不需要精確的數學模型,能處理參數不確定的問題[6-7],因此本文作者選擇模糊控制理論,以MATLAB/Simulink為平臺,建立1/2車輛模型[8],獲得模糊控制下的車輛振動曲線。
1 1/2車輛模型
汽車的每個輪胎分別與車身通過懸架連接。1/2車輛模型包含左右2個車輪及其懸架,因此具備4個自由度,分別為:2個車輪的獨立跳動,車身的垂向運動以及車身俯仰運動。由車身、懸架以及車輪組成的四自由度振動模型如圖1所示。
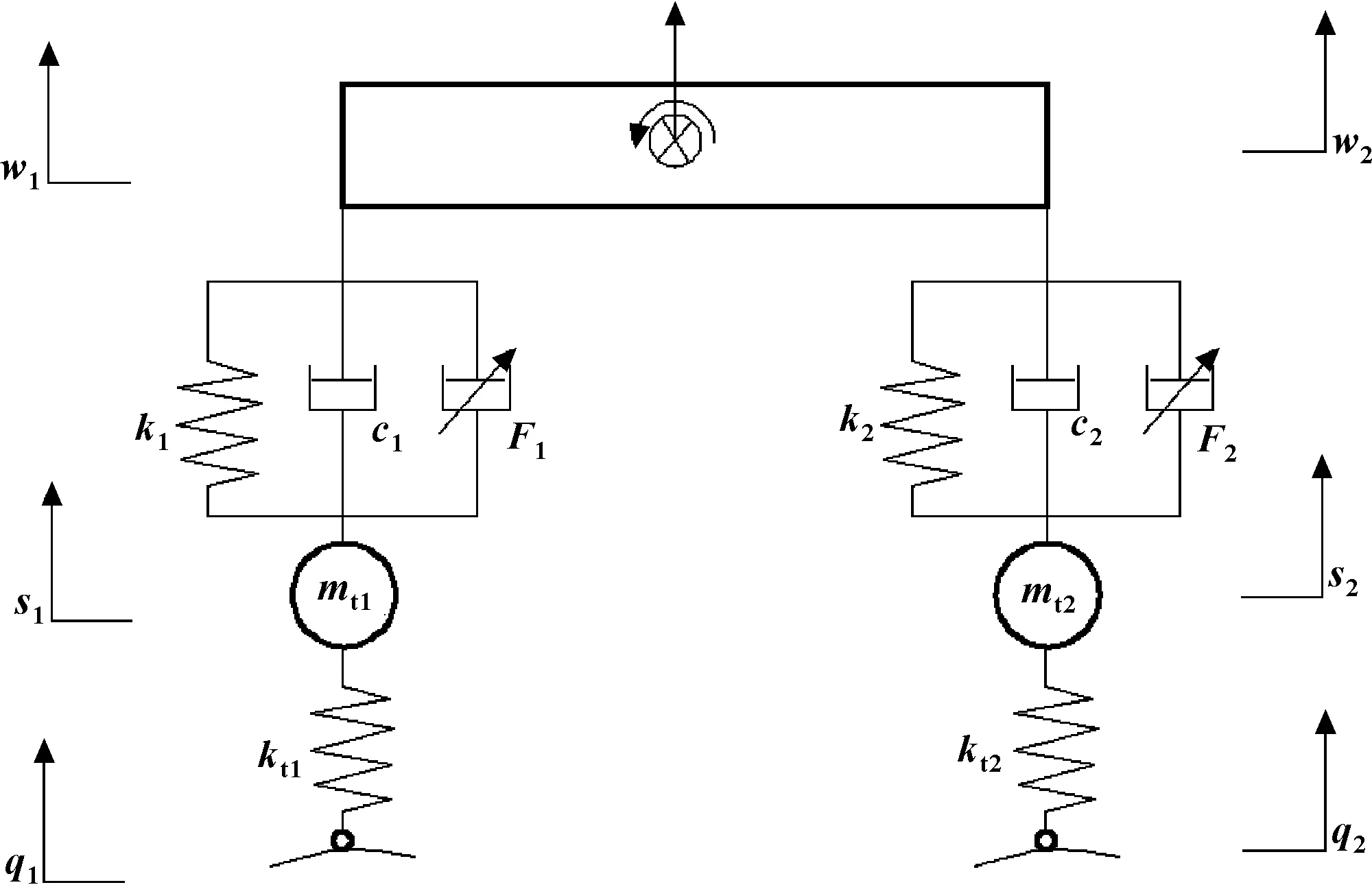
圖1 1/2車輛振動模型
主動懸架相對于被動懸架的不同之處在于,在傳統彈簧和減振器之外,附加了一個作用力產生裝置,可通過傳感器接收車身振動情況,通過控制器控制力發生器,為懸架增加可變作用力F,使懸架能隨時根據不同路況來調整作用力,使車身始終獲得良好的平順性。結合車輛振動模型以及牛頓第二定律得到如下微分方程:
(1)
(2)
F1-F2
(3)
(4)
式中:mi為單個車輪承載的簧載質量;wi為車身垂向運動位移;si為車輪垂向運動位移;qi為路面激勵位移;Ix為俯仰運動轉動慣量;δ為電動汽車俯仰角;mb為總簧載質量;xb為車身垂向運動位移;a、b分別為前后懸架與車身連接點到汽車重心的距離;mwi為單個車輪非簧載質量;ki為懸架剛度;ci為阻尼系數;kwi為輪胎剛度。
表1為電動汽車懸架參數。

表1 電動汽車懸架參數
2 模糊控制
模糊控制理論在20世紀60年代首次被提出,它可以模仿人腦當中的模糊概念,運用模糊數學,能夠精確地描述復雜的系統,并且對其做出正確的判斷和控制。由于模糊控制具備適用性廣、魯棒性強等優點,目前已經廣泛運用在工業控制領域。
模糊控制器一般有以下控制步驟[9-10]:
(1)模糊化;
(2) 規則庫;
(3) 模糊推理;
(4) 解模糊。
所以,文中采用目前廣泛使用的單變量二維模糊控制器,并選取懸掛質量的速度作為誤差信號E,懸掛質量的加速度作為誤差變化EC,作動器的輸出力作為輸出變量。
將誤差E、誤差變化EC看作兩個輸入變量,將控制量看作輸出變量U,建成一個二維的模糊控制器,3個變量采用5個模糊子集來表示它們的模糊狀態:{負大,負小,零,正小,正大},也可以表示成:{NB,NS,ZE,PS,PB}。3個變量的論域為:{-2,-1,0,1,2}。
3個變量的對應關系如表2所示。
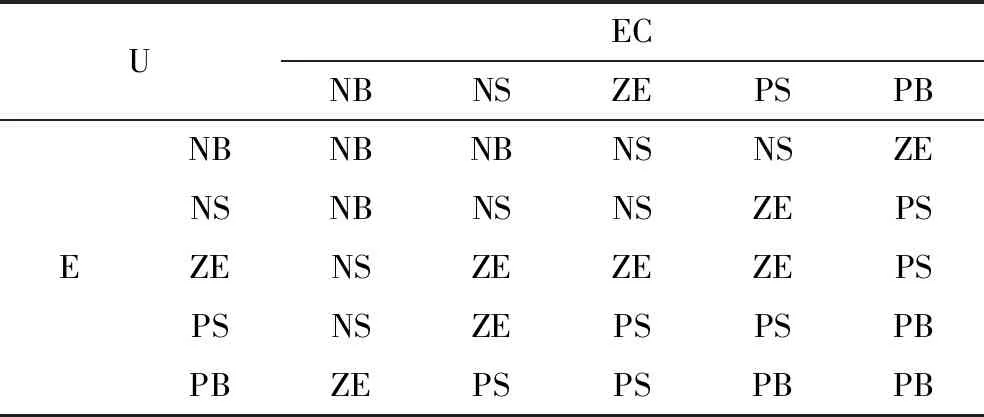
表2 模糊控制規則
到此為止,模糊控制器構建完成。
3 建立仿真模型
文中以MATLAB/Simulink作為仿真平臺,首先建立模糊控制器仿真模型,如圖2所示。
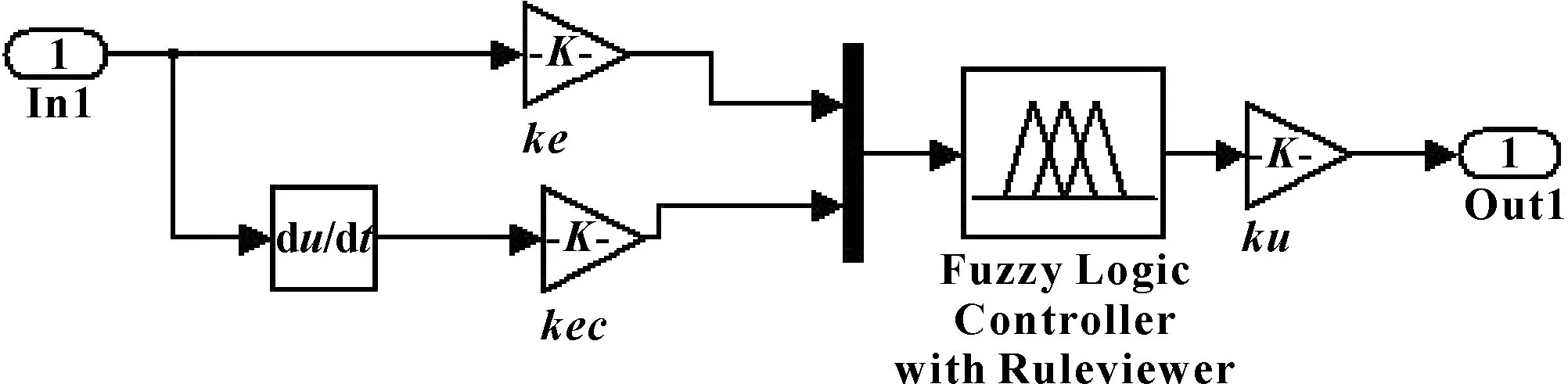
圖2 模糊控制器仿真模型
將表2所示的模糊控制規則輸入到Fuzzy Logic Controller模塊中,得到如圖3所示的模糊輸入輸出規則曲面。
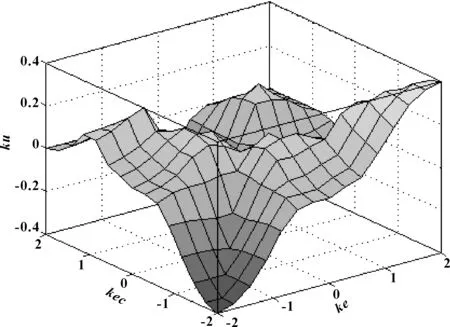
圖3 輸入輸出規則曲面
文中以Simulink自帶的白噪聲速度譜作為路面垂向激勵,根據式(1)—式(4)代表的數學模型在Simulink建立1/4車輛振動模型,如圖4所示。
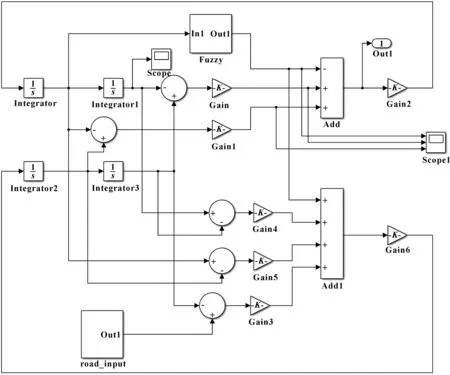
圖4 1/4車輛振動模型
同時,將模糊控制器仿真模型代入到振動模型當中,即完成Simulink仿真模型的建立。
4 仿真結果分析
將第1節中的電動汽車懸架參數代入到第3節建立的Simulink模型,分別得到模糊控制下的車輛垂向振動加速度和俯仰加速度的時域變化規律,并將其與被動懸架的仿真結果進行對比,如圖5—圖6所示。
對仿真得到的兩組數據分別計算其均方根值,并進行對比,其結果如表3所示。
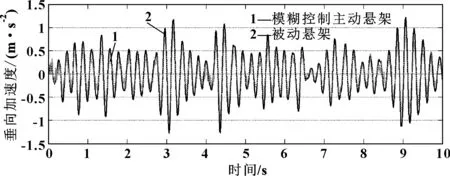
圖5 模糊控制主動懸架與被動懸架垂向加速度對比
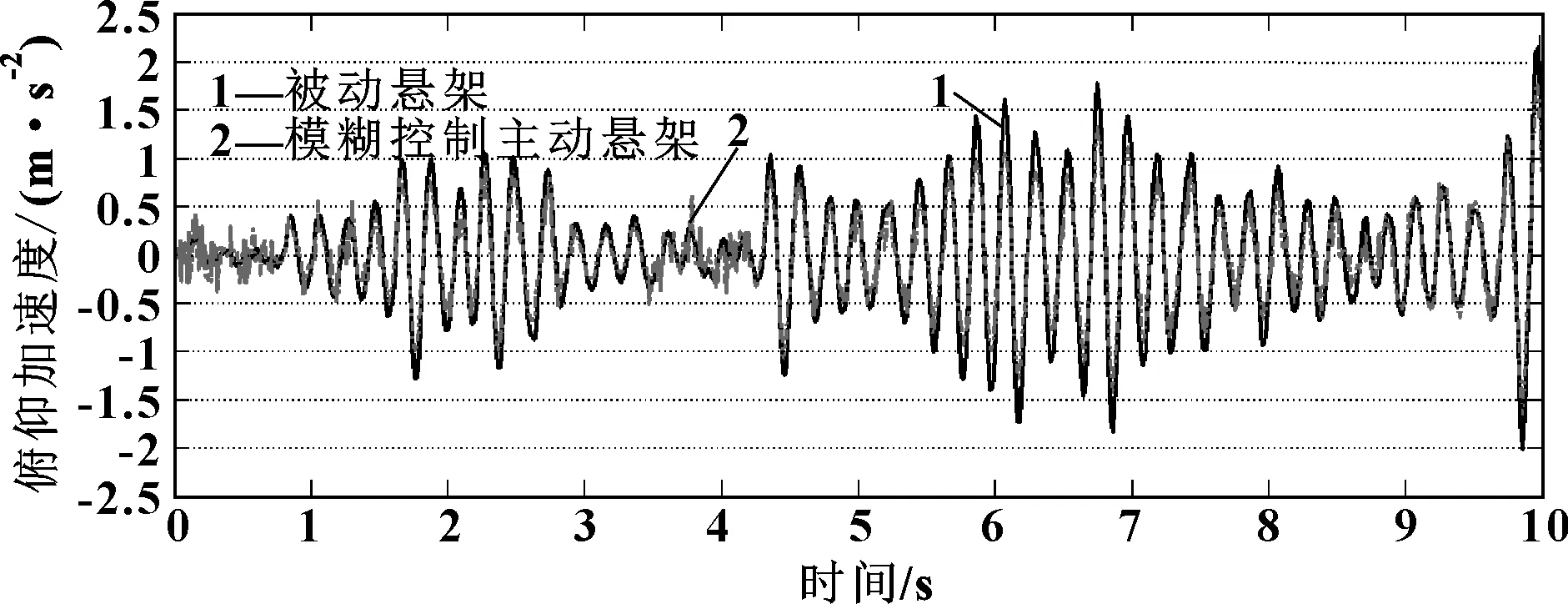
圖6 模糊控制主動懸架與被動懸架俯仰加速度對比
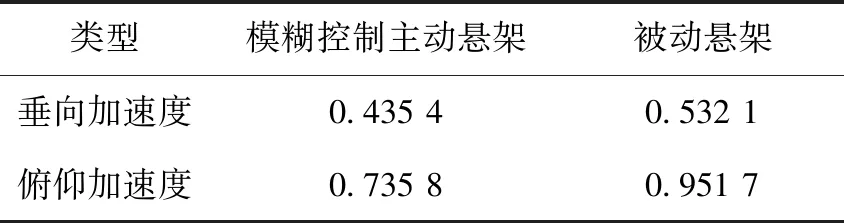
類型模糊控制主動懸架被動懸架垂向加速度0.435 40.532 1俯仰加速度0.735 80.951 7
可以看出,模糊控制主動懸架的垂向加速度均方根值比被動懸架降低了22.2%,模糊控制主動懸架的俯仰加速度均方根值比被動懸架降低了約29.3%。
5 總結
使用模糊控制主動懸架,從俯仰加速度和垂向加速度兩項數據來看,模糊控制主動懸架均取得了良好的優化效果,大大優化了汽車的平順性能。對電動汽車來說,使用模糊控制主動懸架可以降低動力電池組的振動加速度和振動幅度,繼而增加電池組壽命,提高電池工作穩定性,預防電解液泄漏和殼體破損。因此不僅能提高汽車的行駛平順性,也能提高電池可靠性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
