未知環(huán)境下水下機(jī)械手智能抓取的自適應(yīng)阻抗控制
2019-04-08 05:57:20張建軍劉衛(wèi)東程瑞鋒鄭海峰
上海交通大學(xué)學(xué)報(bào) 2019年3期
張建軍, 劉衛(wèi)東, 李 樂, 程瑞鋒, 鄭海峰
(西北工業(yè)大學(xué) 航海學(xué)院, 西安 710072)
在水下機(jī)械手采集水下樣本的過程中,會(huì)出現(xiàn)操作對(duì)象未知以及操作不確定所引起的目標(biāo)損壞或抓取不牢的問題,而含有力控制的柔順性抓取方法能夠解決機(jī)器手操作性不強(qiáng)的問題,其控制核心是自由空間的位置以及抓住過程的力的控制[1],主要控制方法包括阻抗控制、導(dǎo)納控制與比例-積分-微分(PID)控制.其中,大多采用阻抗控制方法.阻抗控制是通過調(diào)節(jié)用戶設(shè)定的目標(biāo)阻抗模型以使機(jī)器人終端達(dá)到柔順性目的的.很多學(xué)者利用阻抗控制方法對(duì)非水下環(huán)境的力、位移控制進(jìn)行了研究,主要用于果蔬抓取[2]、患肢康復(fù)[3]、工件表面打磨[4]、軸孔裝配和機(jī)器人行走等方面.例如:Hogan[5]提出的阻抗控制的基本思想是調(diào)整機(jī)器人末端剛度,以使力和位置滿足某種理想的動(dòng)態(tài)關(guān)系;Seul提出的阻抗控制方法能夠?qū)崿F(xiàn)自由空間的位置跟蹤并將力信號(hào)控制在一定范圍內(nèi),但無法保證力的精確控制[6];王學(xué)林等[7]將阻抗控制用于果蔬抓取,實(shí)現(xiàn)了機(jī)械手指端的期望抓取力的跟蹤,但無法滿足目標(biāo)抓取的多樣性;Dong等[8]建立了基于阻抗控制的模型參考神經(jīng)自適應(yīng)控制系統(tǒng),以適應(yīng)不同的環(huán)境.
為了實(shí)現(xiàn)機(jī)器手的抓住、抓牢控制并避免目標(biāo)損傷,本文提出了一種自適應(yīng)阻抗控制算法,建立了基于位置的阻抗控制模型,對(duì)抓取目標(biāo)的阻抗參數(shù)進(jìn)行在線辨識(shí),利用機(jī)械手末端的運(yùn)動(dòng)特征與剛度的模糊辨識(shí)來調(diào)整期望抓取力,并根據(jù)期望抓取力與實(shí)際抓取力的誤差設(shè)計(jì)自適應(yīng)PID控制器,以實(shí)時(shí)調(diào)節(jié)期望位置,從而實(shí)現(xiàn)機(jī)械手在跟蹤目標(biāo)位置的同時(shí)對(duì)期望抓取力的跟蹤.
1 數(shù)學(xué)模型
1.1 水下機(jī)械手的運(yùn)動(dòng)模型
水下機(jī)械手主要用于水下目標(biāo)的采集.考慮到水下的復(fù)雜環(huán)境,本文只對(duì)1根含2個(gè)關(guān)節(jié)的手指進(jìn)行研究,2個(gè)關(guān)節(jié)的手指可以簡化為1個(gè)二連桿旋轉(zhuǎn)機(jī)器人.與機(jī)器人的動(dòng)力學(xué)模型相同,水下機(jī)械手的動(dòng)力學(xué)模型可描述為
τ-JT(q)Fe
(1)


則機(jī)械手操作空間與關(guān)節(jié)空間的位置、速度和加速度可換算為
(2)
將式(2)代入式(1),所得在笛卡兒坐標(biāo)系下機(jī)械手的動(dòng)力學(xué)方程為
(3)
式中:下標(biāo)x表示操作空間.將式(2)代入式(1),并與式(3)對(duì)比可得
(4)
1.2 環(huán)境模型
將抓取目標(biāo)看成線性彈簧[9],在笛卡兒坐標(biāo)系下,目標(biāo)的抓取力為
(5)
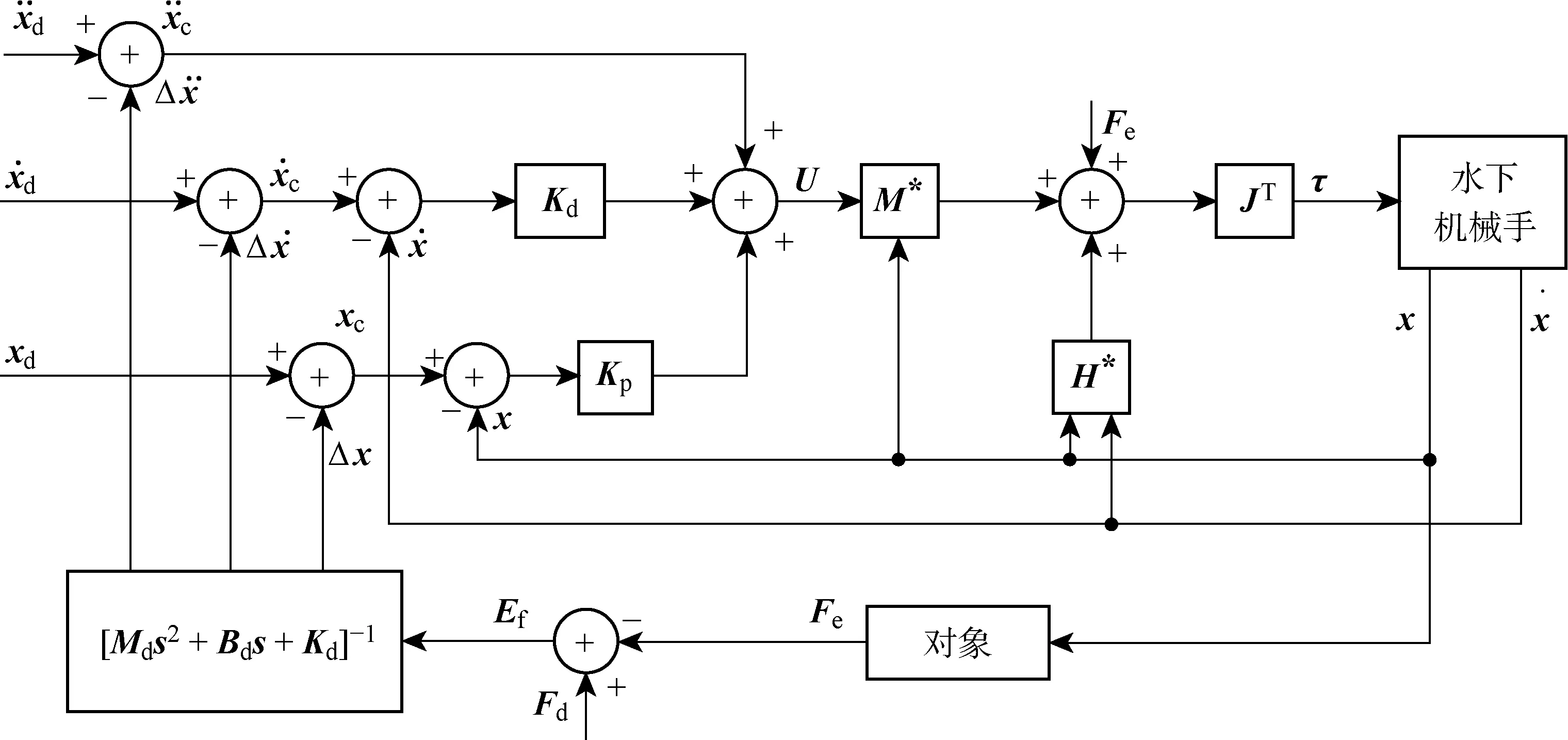
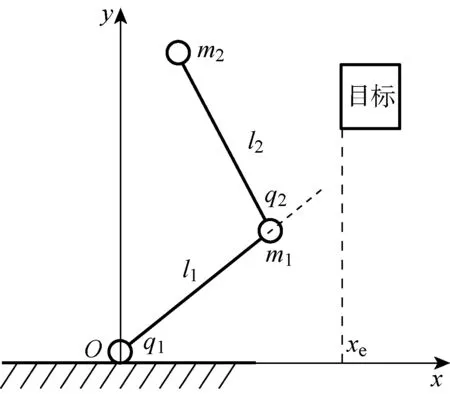
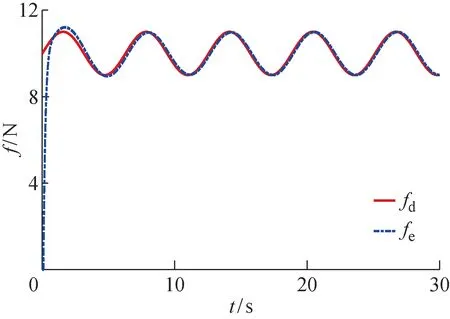
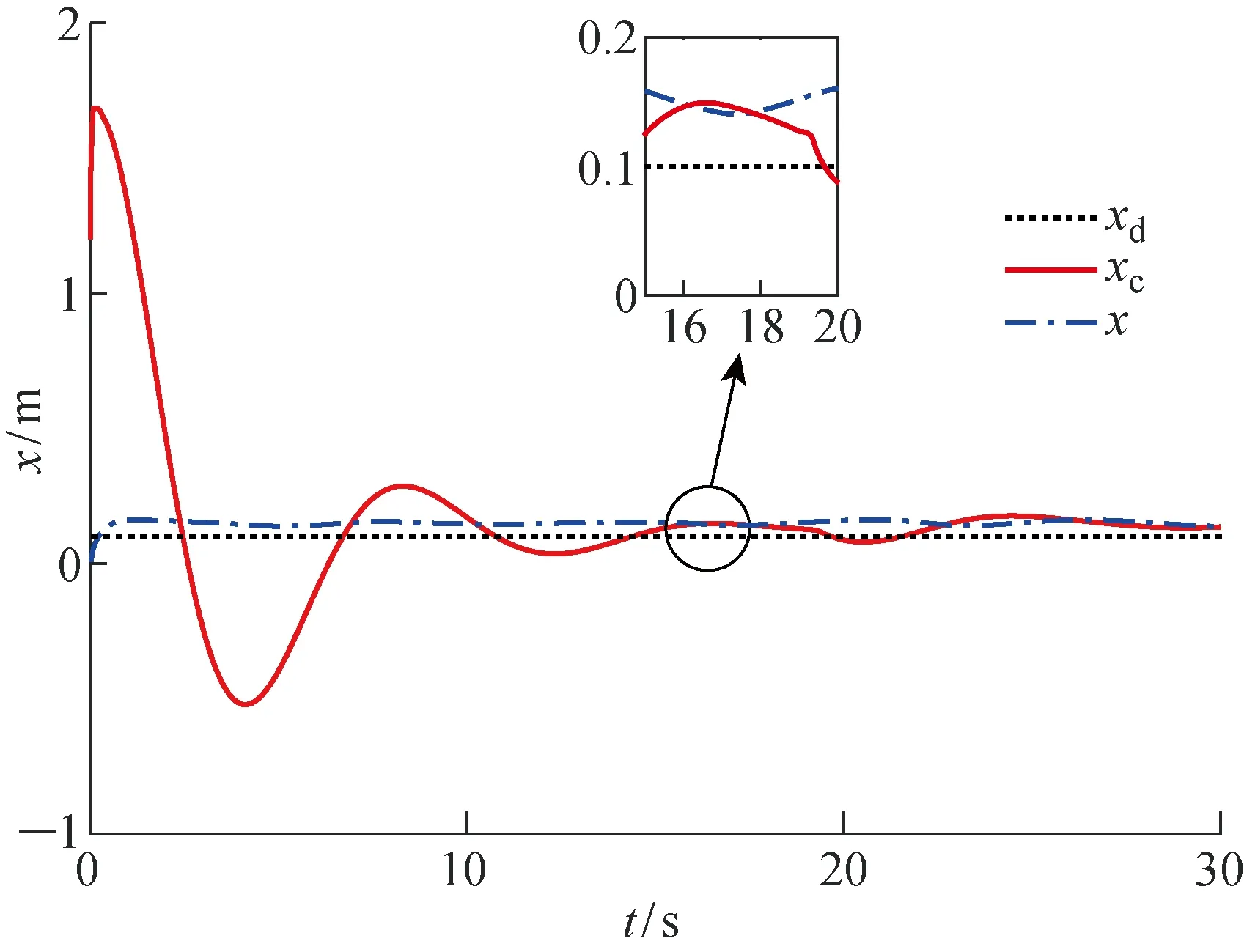
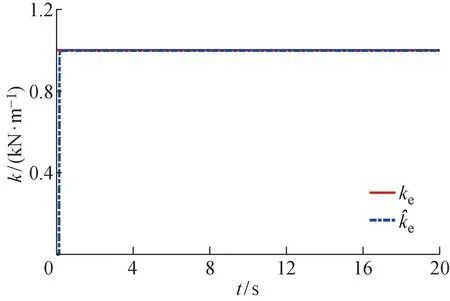
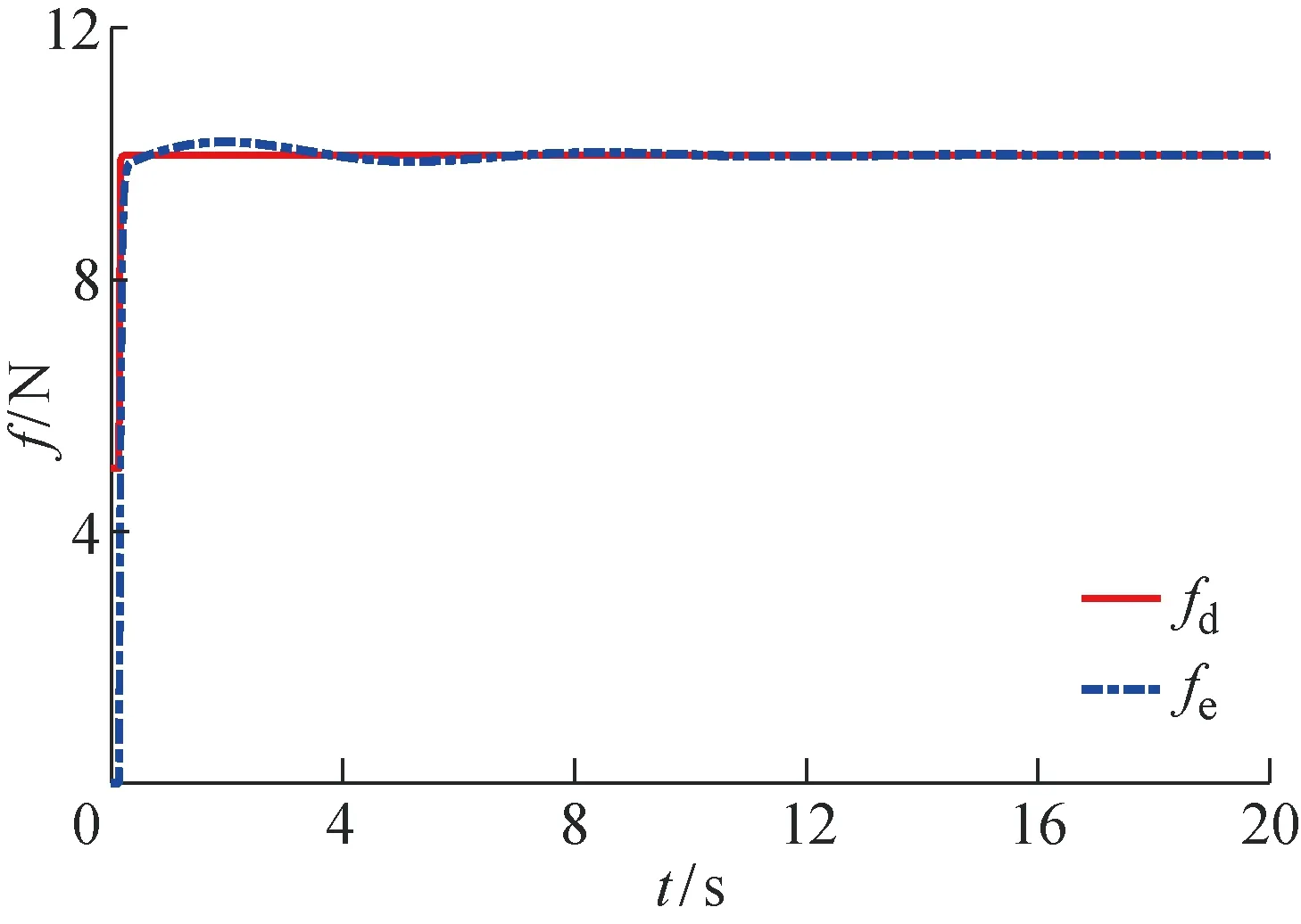
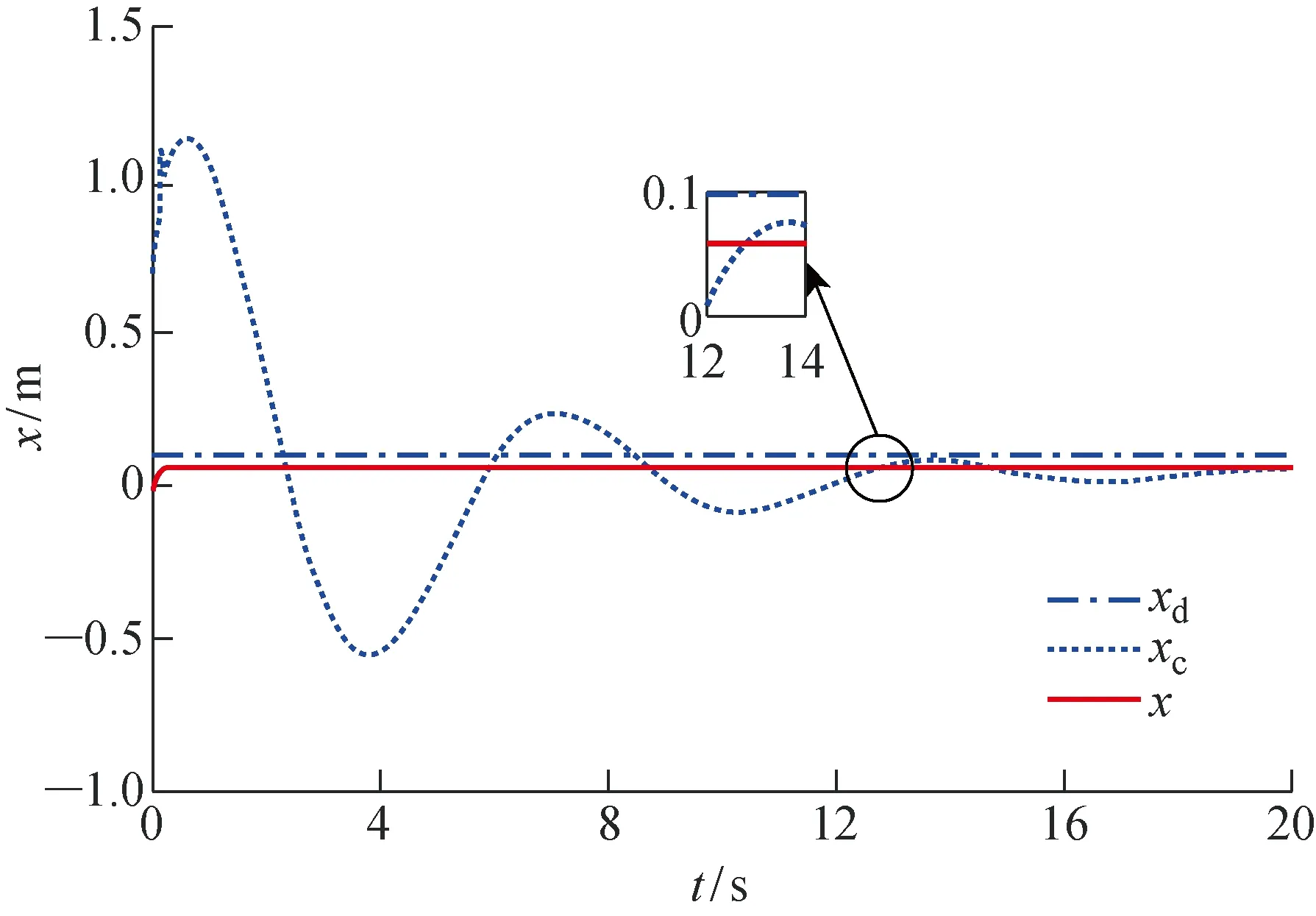
式中:xe為抓取目標(biāo)的位置;ke為目標(biāo)剛度系數(shù).當(dāng)x 在機(jī)械手末端執(zhí)行器與抓取目標(biāo)的相互作用力、末端位置偏差、速度偏差和加速度偏差之間建立一個(gè)2階系統(tǒng)的控制模型,即描述阻抗控制的目標(biāo)阻抗模型,其具體形式為 Kd(xd-x)=Fd-Fe (6) (7) 圖1 基于位置的阻抗控制系統(tǒng)結(jié)構(gòu)Fig.1 The impedance control system structure diagram based on position (8) 由2階系統(tǒng)的穩(wěn)定性可知,隨著時(shí)間增加,x收斂于xc,以保證機(jī)械手對(duì)位置的準(zhǔn)確跟蹤.根據(jù)圖1和式(7)及(8),所得整體的系統(tǒng)控制律為 (9) 不失一般性,只分析一維空間的情形.采用fd和fe分別表示機(jī)械手在x軸方向的期望抓取力與實(shí)際抓取力.固定的力和位置的期望值會(huì)給抓取力的跟蹤帶來靜態(tài)誤差,因此,設(shè)定機(jī)械手位置的期望值xd=xe+fe/ke,以確保力信號(hào)與位置信號(hào)的準(zhǔn)確跟蹤[10].其中,xd、xe和ke分別表示期望位置、抓取目標(biāo)的實(shí)際位置及目標(biāo)剛度系數(shù)的值.在實(shí)際中,無法獲取xe與xd,且易造成跟蹤的靜態(tài)誤差,只有實(shí)時(shí)調(diào)整期望位置,才能夠?qū)崿F(xiàn)對(duì)期望的抓取力與位置的跟蹤.另外,采用固定的fd值無法滿足目標(biāo)抓取的多樣性,所以通過辨識(shí)抓取目標(biāo)的性能參數(shù)和模糊控制器的控制來在線調(diào)整fd值. 不失一般性,只分析一維空間的情形.為了實(shí)現(xiàn)期望抓取力的跟蹤以及期望位置的控制,對(duì)抓取目標(biāo)的參數(shù)進(jìn)行在線辨識(shí).本文采用遞推最小二乘法辨識(shí)目標(biāo)的剛度與阻尼.假設(shè)抓取目標(biāo)具有阻抗特性,即為無源的,抓取目標(biāo)為彈簧-阻尼模型,其接觸時(shí)的抓取力可表示為 (10) 根據(jù)抓取目標(biāo)的特征實(shí)時(shí)調(diào)整機(jī)械手末端與抓取目標(biāo)之間的期望抓取力.根據(jù)抓取過程和抓取目標(biāo)的阻抗特點(diǎn),提出如下期望抓取力的在線模糊調(diào)整算法: fd(k)=fd(k-1)+γΔfc (11) 式中:fd(k)、fd(k-1)分別為k時(shí)刻以及k-1時(shí)刻機(jī)械手末端與抓取目標(biāo)之間期望抓取力的值;γ∈[-1,1],為根據(jù)抓取目標(biāo)阻抗參數(shù)調(diào)整的期望抓取力的調(diào)節(jié)系數(shù);Δfc為常數(shù),表示期望抓取力信號(hào)每次調(diào)節(jié)的最大值. 然后,根據(jù)以上模糊控制規(guī)則建立從輸入到輸出的模糊規(guī)則表. 本文設(shè)計(jì)了自適應(yīng)PID算法以實(shí)現(xiàn)期望位置信號(hào)的自適應(yīng)調(diào)整.在期望抓取力的跟蹤位置xd加入調(diào)節(jié)信號(hào)[13],即 xd=xd0+Δxf (12) 式中:xd0為初始設(shè)定的期望位置;Δxf為期望位置的修正量,且 式(6)中的二維空間可以解耦成2個(gè)一維空間,在一維空間情形下的阻抗控制模型為 kd(xd-x)=fd-fe (13) 式中:md、bd、kd分別為期望慣性量、阻尼和剛度的一維表示形式. (14) 采用模型參考自適應(yīng)控制方法和Lyapunov穩(wěn)定性定理設(shè)計(jì)自適應(yīng)阻抗控制律,式(14)為模型參考自適應(yīng)控制中的可調(diào)系統(tǒng).調(diào)整d(t)、c(t)和p(t),以縮小實(shí)際抓取力誤差ef(t)與期望抓取力誤差em(t)的差值,使得實(shí)際的系統(tǒng)響應(yīng)跟隨參考模型的響應(yīng).em(t)的軌跡取決于參考模型,將參考模型設(shè)計(jì)為理想的2階系統(tǒng),即 (15) 利用Lyapunov穩(wěn)定性定理求解自適應(yīng)律,令 (16) 則式(14)可簡化為 (17) 由式(17)減去式(15),所得參考模型與實(shí)際模型誤差方程的狀態(tài)空間為 (18) (19) 式中: ω0、ω1和ω2均為任意的正數(shù),P為任意一個(gè)非奇異正定矩陣.顯然,V(Ee,t)具有正定性.對(duì)V(Ee,t)求導(dǎo),可得 (20) 式中: (21) 系數(shù)χ(t)、d(t)、c(t)和p(t)的自適應(yīng)調(diào)整率為 (22) 式中:λp、λv、η、μ1和μ2均為較小的正數(shù);d0、c0和p0分別為d(t)、c(t)和p(t)在初始時(shí)刻的值. 分別根據(jù)期望抓取力與實(shí)際抓取力的誤差對(duì)d(t)、c(t)和p(t)進(jìn)行實(shí)時(shí)調(diào)整,將所得一個(gè)位置的較小修正量輸入經(jīng)典阻抗控制器的調(diào)整項(xiàng)中,從而達(dá)到了間接調(diào)整期望位置的目的. 圖2 2自由度機(jī)械手仿真模型Fig.2 The simulation model of two degrees of freedom manipulator 圖3 自適應(yīng)控制抓取力的跟蹤曲線Fig.3 The force tracking curves with adaptive control 圖4 自適應(yīng)控制位置的跟蹤曲線Fig.4 The position tracking curves with adaptive control 實(shí)驗(yàn)1不加辨識(shí),設(shè)定1個(gè)變化的力信號(hào)進(jìn)行跟蹤實(shí)驗(yàn).假設(shè)在x軸方向的力的跟蹤信號(hào)fd=10+sint,y軸方向的力為0,抓取目標(biāo)的實(shí)際位置xe=0.05 m,期望位置xd=0.10 m,仿真結(jié)果如圖3和4所示.由仿真結(jié)果可見,機(jī)械手的抓取滿足對(duì)變化的力的跟蹤要求,從而實(shí)現(xiàn)了機(jī)械手的抓取以及期望抓取力信號(hào)的控制. 圖5 自適應(yīng)控制目標(biāo)阻抗的剛度辨識(shí)曲線Fig.5 The object impedance identification curves with adaptive control 圖6 自適應(yīng)控制抓取力的跟蹤曲線Fig.6 The force tracking curves with adaptive control 圖7 自適應(yīng)控制位置的跟蹤曲線Fig.7 The position tracking curves with adaptive control 實(shí)驗(yàn)2加入在線辨識(shí)的抓取目標(biāo)阻抗,通過自適應(yīng)調(diào)節(jié)期望的抓取力來實(shí)現(xiàn)機(jī)械手抓取力信號(hào)的跟蹤.只考慮x方向的跟蹤.設(shè)置xd=0.10 m,抓取力的初始值為5 N,xe=0.05 m,ke=1 kN/m,仿真結(jié)果分別如圖5~7所示.由圖5~7可見,所設(shè)計(jì)的自適應(yīng)阻抗控制系統(tǒng)能夠很好地辨識(shí)目標(biāo)阻抗,根據(jù)阻抗參數(shù)模糊推理出需要抓取的目標(biāo)的期望抓取力,并且能夠?qū)崿F(xiàn)期望的位置調(diào)整,保證了位置跟蹤.另外,機(jī)械手在從自由空間到約束空間的過渡過程中,對(duì)抓取力控制的柔順性很好,雖然在控制位置出現(xiàn)了一個(gè)小的抖動(dòng),但是不影響對(duì)實(shí)際位置的跟蹤,從而滿足了不但能夠抓住而且能夠控制抓取力的功能. 在傳統(tǒng)阻抗控制方法的基礎(chǔ)上,提出了自適應(yīng)阻抗控制方法.以阻抗控制外環(huán)、位置控制內(nèi)環(huán)為核心,分別設(shè)定期望抓取力與期望位置,利用遞推最小二乘法在線辨識(shí)抓取目標(biāo)的阻抗參數(shù),根據(jù)辨識(shí)的目標(biāo)阻抗特征與運(yùn)動(dòng)屬性,通過模糊控制在線調(diào)節(jié)期望抓取力,采用自適應(yīng)PID控制器實(shí)時(shí)調(diào)節(jié)期望位置,以實(shí)現(xiàn)在機(jī)械手跟蹤期望位置的同時(shí)對(duì)期望抓取力的跟蹤,從而滿足對(duì)目標(biāo)的抓住、抓牢并防止損傷目標(biāo)的智能抓取功能.同時(shí),通過在MATLAB/Simulink軟件平臺(tái)上進(jìn)行仿真實(shí)驗(yàn),驗(yàn)證了所提自適應(yīng)阻抗控制方法的有效性.結(jié)果表明,所提自適應(yīng)阻抗控制方法在自由空間和約束空間均具有良好的力、位移的跟蹤性能.2 整體控制策略
2.1 阻抗控制模型
2.2 基于位置的阻抗控制


3 自適應(yīng)阻抗控制的實(shí)現(xiàn)
3.1 遞推最小二乘法的參數(shù)辨識(shí)

3.2 期望抓取力的模糊調(diào)整
3.3 期望位置的自適應(yīng)調(diào)整


4 仿真實(shí)驗(yàn)

5 結(jié)語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03