三明某土地確權項目中無人機測量技術應用研究
2019-04-03 15:39:56侯小艷
科技創新導報 2019年33期
關鍵詞:無人機
侯小艷
摘? ?要:本文以三明市某土地確權項目為工作背景,探討了無人機攝影測量和土地確權底圖制作方法,論文詳細論述了整個實施流程,包括航線設計、像控測量、矢量圖采集和調查工作底圖制作等,給出了立體矢量圖和正射影像圖的疊加結果,論文是筆者工作實踐基礎上的理論升華,相信對從事相關工作的同行能有所裨益。
關鍵詞:無人機? 攝影測量? 確權? 底圖制作
中圖分類號:P231? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2019)11(c)-0034-02
1? 工作區概況
工作區位于三明市某鎮,地勢較為平坦,總面積約為 80km2,耕地面積約為 10 萬余畝,計劃在 2 個月內完成約 10萬余畝耕地的農村土地承包經營權發證工作,由于該項目測試時間是在 4月份,植被覆蓋率較低,但是麥苗已經生長出來,并不是很高,所以很多不同的地塊,麥苗長勢也不盡相同,田地田埂、田間道路、溝渠、池塘、田坎以及居民地邊界等均能在影像上清晰分辨,有益于后期承包地塊的識別,基于這些原因,在作業過程中,我們考慮采用航測法和實測法相結合的方式進行農村土地承包經營權確權登記發證工作,首先采用固定翼無人機搭載數字航攝儀獲取試驗區的真彩色原始影像,通過POS 數據解算,空三加密,制作數字正射影像,在全數字攝影測量系統上立體采集矢量數據,制作調查工作底圖,這樣可以大大提高作業效率,縮短了作業工期。
2? 作業流程
本項目采用固定翼無人機搭載賓得645D數字航攝儀、機載POS進行航空攝影,獲取作業區范圍內的真彩色原始影像和POS數據,通過對POS數據進行解算,得到每張像片的外方位元素,通過GNSS-RTK技術進行外業像片控制測量,獲取像片控制點的高程坐標和平面位置坐標。和POS解算數據一起,共同參與到空中三角測量運算中,在空中三角測量運算中,我們是利用Inpho軟件進行的,將空三加密成果和DEM數據作為影像糾正的基礎,制作數字正射影像,在全數字攝影測量系統下,立體采集地塊邊界信息,內業無法分辨及有疑問的地方,做好標記,使用GPS-PTK設備外業進行實地測量,得到比較準確的承包地塊界址點位坐標,即采用航測法與局部實測法相結合的方式獲取承包地塊界址點點位坐標,內業采集地塊邊界,將地塊矢量圖、基本農田數據、地力等級數據等疊加到數字正射影像上,制作調查工作底圖,進行外業權屬調繪,對影像無法判讀及權屬糾紛較大的地塊輔以實測檢驗的方法完成。該項目共飛行了3個架次,22條航線,6條構架航線,約120km2,布設像控點35個,檢查點44個,制作1:2000標準分幅數字正射影像114幅。
3? 航線設計
在執行航攝任務之前,根據實地收集的數據資料,以收集到的已有大比例尺地形圖數據為設計基礎,根據實地要求的成圖精度,地形數據參考全球90m DEM(SRTM)進行航線設計,在本實驗項目中,地面分辨率設計為0.15m,航向重疊設計為65%,旁向重疊設計為35%,計算無人機的飛行高度,基線長度,旁向間隔等相關飛行參數。(1)采用專業設計軟件,地形參考全球90m DEM(SRTM),根據試驗區形狀,采用東西方向飛行,南北方向布設構架航線,航線布設覆蓋整個試驗區。(2)調查圖件采用 1:2000比例尺,因此在航線設計時,為確保獲得更好的影像質量,地面分辨率設計為0.15m。(3)航向重疊度設計為 65%,旁向重疊度設計為35%,以滿足后期空三加密要求。考慮到減少外業像控工作量,采用加飛構架航線的設計方案。(4)該試驗區共設計了3個飛行架次,22條航線,6條構架航線。
4? 像片控制測量
4.1 像片控制點布設
本實驗項目采用區域網布點方案,全都布設為平高控制點,利用航線設計圖進行像片控制點的選點,布設的控制點滿足以下目標條件:像片控制點布設在航向及旁向六片或五片重疊處,且位于旁向重疊中線附近,像控點刺點目標的影像明顯、清晰可見,在實地及影像均能清晰標記,并易于觀測,無信號遮擋或干擾。
4.2 空三加密
本項目采用 Inpho 軟件進行空三加密,Inpho 軟件是比較常用的航空攝影處理軟件,自動匹配、處理效率較高,使用便捷等,自動匹配連接點的功能比較強大,甚至在水域、森林、沙漠等特征點較少的區域也可進行較好的匹配,首先根據測區概況建立工程,加入相機參數,將數據進行轉換并生產金字塔,劃分航帶。空三通過自動連接點匹配算法,針對框幅式數據設置各項參數,然后軟件并行式處理各項任務。影像匹配完成后,即可生成相對定向報告,分為航帶內立體相對、航帶內三度連接以及航帶間連接三個部分。 然后將解算后的 POS 數據和外業像片控制點數據導入工程,先添加測區四角控制點或多個控制點,進行初步平差,可有效的將測區平移至控制點范圍,之后在控制點列表中直接雙擊某控制點,即可彈出該對控制點對應的影像,并很好的預測相應的位置。
4.3 正射影像制作
以數字高程模型(DEM)數據成果和空三加密成果為基礎,對原始影像進行糾正,首先生成像對正射影像,然后在單個模型中,選擇影像色彩鮮艷、色調均勻、亮度飽滿的像片生成正射影像,然后逐張生成單片正射影像。
無人機搭載的相機像幅相對較小,單幅影像的區域覆蓋范圍是比較有限,無法滿足數字正射影像實際生產或應用的需要,因此在我們許多的實際生活應用中,都需要按照標準分幅進行裁剪,因此,首先需要把單片數字正射影像拼接成一幅覆蓋范圍更大的數字正射影像,即進行影像鑲嵌(拼接)處理。在勻光處理時,既可以只進行單幅影像勻光處理;也可以進行整體勻光處理。影像勻光結果應盡可能保持原始影像的色調、色彩與亮度、反差,達到整體影像色調的一致性。在實際工作中,我們首先對一幅影像進行勻光處理,以此作為樣片,對整個測區進行勻光,以保證整個測區勻光處理結果的一致性。
5? 矢量圖采集
矢量圖采集的成果質量對整個調查底圖的制作質量影響較大,同時也會影響到外業調查的工作效率和工作質量。在本實驗項目中,矢量圖數據采集是在全數字攝影測量軟件系統上進行的,采集過程中,不需要對測區范圍內的所有地物進行全要素采集,只需采集幾個特定的要素即可,主要包括承包地塊邊界、農村道路、溝渠、居民地范圍、坑塘、陡坎等,立體采集原則上是由內業定位,外業定性,內業對有把握并能判準的地物、地貌要素,要用測標中心切準地物外輪廓線,按規定圖層及符號準確繪出。當地物輪廓存在部分遮擋時,應準確地測出可見部分。若地物影像立體不明顯或對地物位置沒有把握時,要作標記以留待外業進行核實、補測等,盡量為下步提供準確、可靠、完整的數據。內業采集完成后,交給外業進行實地調繪,并進行核實確認。本實驗區采用航天遠景軟件進行,將空三成果導入航天遠景全數字攝影測量工作站,由于無人機航空攝影獲取的高精度 DOM 清晰度較高,同時影像獲取時間是在 12 月份,各類地物的遮擋較小,對影像的內業判繪極為有利,在立體狀態下,承包地塊邊界、道路邊線、田埂、溝渠、居民地輪廓等地物清晰可見,地勢的高低起伏可以明顯區分,對于陡坎,賦予高程以區分陡坎上下;田地田埂清晰可見,可直接采集承包地塊邊界,對于地類相同,田埂無法分辨的,需進行外業實地采集。道路、溝渠、河流、居民地等邊界線在立體狀態下可以準確采集,對內業無法判繪或判繪不準的地物進行外業實地調繪、測量,再根據實地調繪采集的數據信息進行相應影像圖和立體矢量圖的確認。
6? 調查工作底圖制作
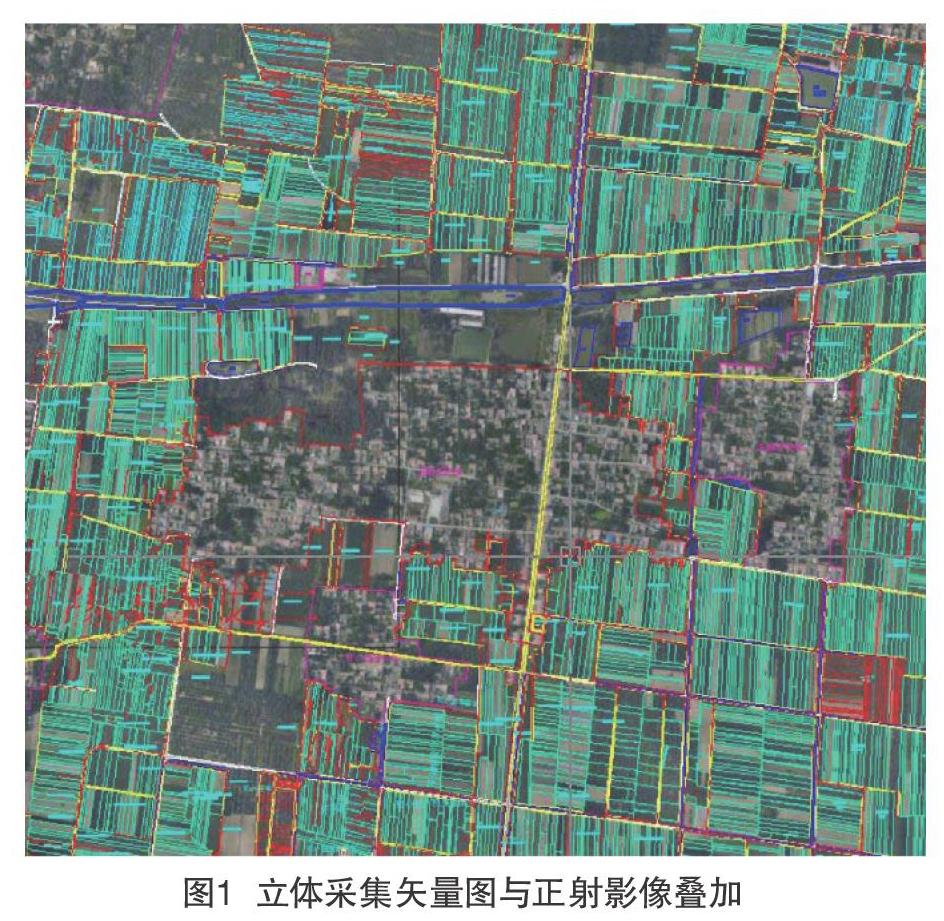
對立體采集的包括地塊、水系、道路、居民地等圖層組成的矢量數據,進行圖形編輯,依據數據入庫的要求,采用不同特征的線段、線型、單元符號,將權屬界線一一連接,形成權屬圖。將所得到的結果,也就是權屬圖再按照《GBT_20257.1-2007_國家基本比例尺地圖圖式_第 1 部分:1:500_1:1000_1:2000 地形圖圖式》的要求,進行圖面的注記和整飾,形成矢量圖形,套合正射影像數據、收集到的行政界線、基本農田信息數據,打印成 1:2000 比例尺調查工作底圖。在工作過程中采用全數字攝影測量系統進行立體采集地塊邊界,相比較圖解法而言,精度較高。實地采集地塊圖、矢量圖與影像的疊加圖具體情況如圖1所示。
7? 結語
與傳統的有人機航空攝影相比,無人機具有價格低廉、作業高效、飛行高度低等優勢,可快速獲取清晰的精度較高的影像數據信息,同時采用POS輔助航空攝影可大大減少外業的工作量,降低生產成本,擁有非常可觀的經濟性,高科技的無人機在航空攝影測量方面的使用越來越廣泛,由此制成的數字正射影像產品在土地調查中發揮著極其重要的作用。
參考文獻
[1] 張可.基于3S技術的農村集體土地所有權確權登記方法研究[D].吉林大學,2016.
[2] 洪亮,周志成,方敏,等.低空無人機航攝平臺的探索與實踐[J].測繪地理信息,2013,38(3):77-79.
[3] 馮新偉.土地利用現狀遙感更新外業調查方法研究[J].國土資源科技管理,2015,22(6):69-72.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
