基于雙目測距的牙齒熱壓模型激光切割教學實驗平臺開發
2019-04-03 07:50:44張立軍張天力王曉強繆俊杰李增輝張軍偉王旱祥
實驗技術與管理 2019年3期
關鍵詞:實驗
張立軍, 張天力, 王曉強, 繆俊杰, 李增輝, 張軍偉, 王旱祥
(中國石油大學(華東) 機電工程學院, 山東 青島 266580)
切削技術作為機械制造技術中的基礎技術,在“切削原理與刀具”“機械加工概論”“現代制造技術”等專業課中均有講述。近年來,隨著切削技術與計算機技術的不斷結合,切削裝備不斷朝著多自由度化、智能化的方向發展。因此,不僅要讓學生掌握切削加工基礎知識,還要讓其認識和掌握與切削技術有關的新興技術。
在與切削技術相關的教學實踐中,學生通常接觸到的切削裝備大多只具有三個自由度,很少有與計算機技術、圖像處理等相結合的多自由度切削裝備。為加深學生對現代切削裝備多維度、智能化發展的認識與了解,體會多學科交叉融合技術的發展趨勢,開發了一套基于雙目測距原理的六自由度牙齒熱壓模型激光切割實驗平臺。該平臺主要實現了對生產隱形牙套過程中牙齒熱壓模型的后期切割處理。隱形牙套是目前醫療領域中應用在隱形正畸方面的主要矯正工具,其牙齒熱壓模型一般是在重新排列的牙齒模型基礎上應用真空熱壓成形的方法制作而成[1]。由于每個人牙齒結構狀態不同及生產過程中的加工誤差導致生產出的牙齒熱壓模型形態各異,所以目前牙齒熱壓模型的切割處理主要是人工切割,生產效率低,加工精度得不到保障。本實驗平臺采用將雙目測距技術與激光切割技術相結合的辦法,通過測量牙齦線的三維坐標并控制激光頭運動完成沿牙齦線的切割。學生在使用該教學平臺測量牙齦線三維坐標的過程中,能夠學習雙目測距的理論知識,了解圖像采集與處理過程,感受計算機技術在切削裝備中的發展與應用。同時學生通過對本實驗平臺機構的實際操作與觀察,能夠真正了解多自由度機構的工作原理,掌握切割系統中所涉及的絲桿傳動、皮帶傳動等裝置的結構特點及步進電機、舵機和相關電子元件的使用方法。
1 激光切割教學實驗平臺的工作原理
該激光切割教學實驗平臺主要分為計算機上位系統和激光切割系統。其中計算機上位系統由圖像采集與處理系統、控制指令系統和通信系統三個子系統組成。圖像采集與處理系統主要實現對牙齦線的圖像采集與處理,并通過雙目測距原理得到牙齦線的三維坐標;控制指令系統根據測量得到的牙齦線坐標生成控制機械結構運動的控制指令;通信系統實現了上位機與下位機之間的命令傳輸及信息交換。激光切割系統由下位機系統與動作執行系統組成,其中下位機系統通過接收上位機傳輸的指令并進行處理,進而控制動作執行系統執行切割動作。
1.1 實驗平臺的工作流程
本實驗平臺切割過程的整體流程如圖1所示。該實驗平臺的工作流程為:首先,計算機程序初始化,下位機系統控制升降板位置歸零并在升降板歸零后控制升降板上的載物平臺旋轉,當載物平臺轉動至預定的角度時控制其停止轉動并向上位機發送脈沖;其次,上位機在接收到脈沖后,控制雙目相機對牙齒模型拍照并對采集到圖像進行處理,通過坐標計算得到當前圖像中牙齦曲線的實際三維坐標;同時,控制指令系統控制載物平臺繼續轉動到下一位置,提取下一段曲線的坐標;最后,控制指令系統根據得到的坐標生成控制指令并傳輸給下位機系統,進而驅動執行機構實現激光切割動作。
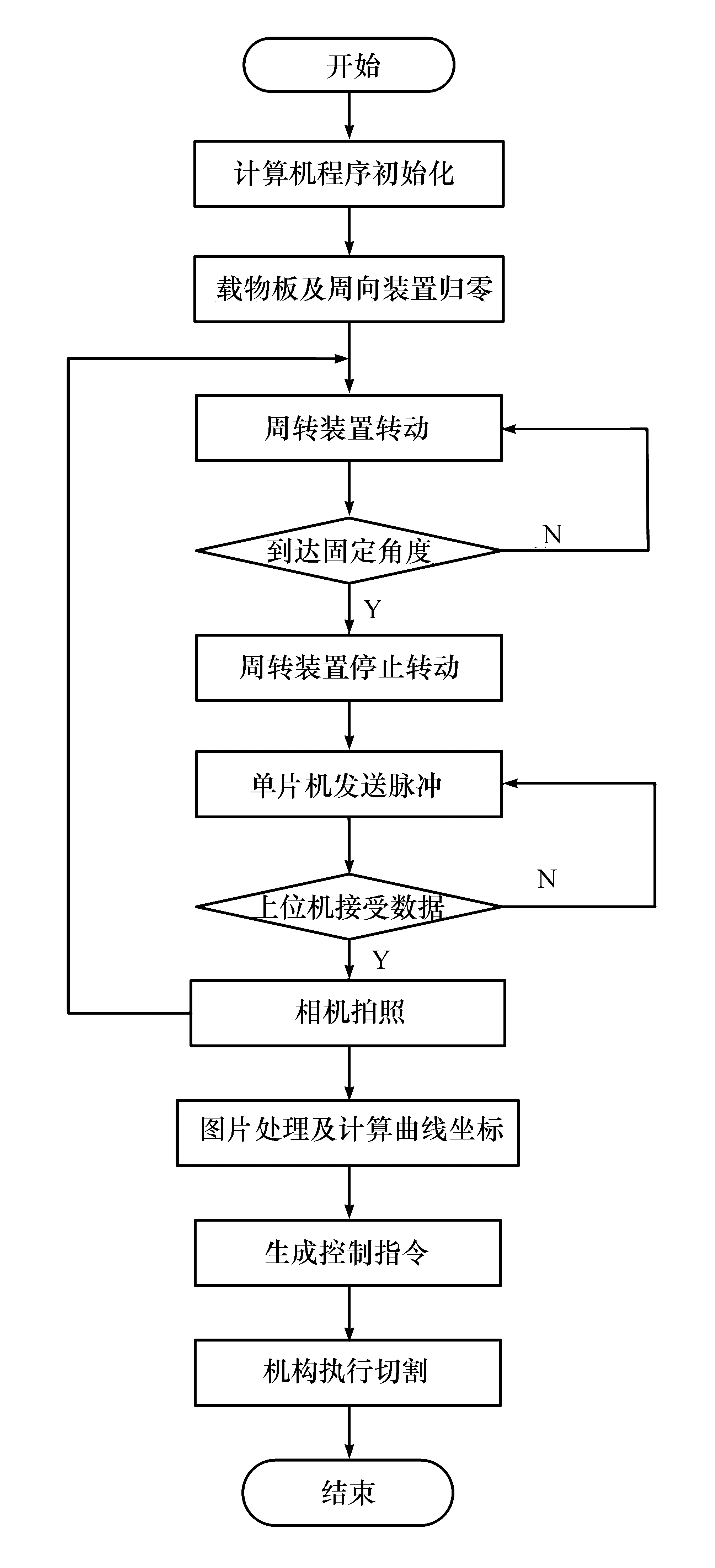
圖1 實驗平臺切割過程的整體流程圖
1.2 實驗平臺獲取牙齦線坐標的基本原理
本實驗平臺在獲取切削軌跡坐標的過程中,主要應用了雙目測距技術,雙目測距作為機器視覺關鍵技術之一,被廣泛用于機器人、非接觸測量等領域[2],采用雙目平行的視覺模型,理論上由兩臺結構和性能完全相同的CCD相機組成,要求兩臺攝像機的像平面精確地位于同一平面上,光軸嚴格平行[3-4],如圖2、圖3所示。
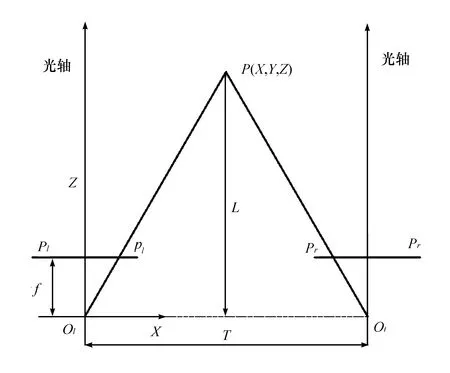
圖2 測距原理圖

圖3 雙目平行視覺模型圖
由文獻[5]可知,利用相似三角形原理,由
得
(1)
其中,Ol與Or分別表示左右攝像機的光心,X、Y、Z軸方向為相機坐標系下的坐標軸方向。O1與O2為左右圖像坐標系的原點,Xl、Yl、Xr、Yr方向分別為左右圖像坐標系下的坐標軸方向。Pl與Pr分別表示兩攝像機的左右投影平面,P(X,Y,Z)點表示切割曲線上的一點,pl與pr分別表示P點在Pl與Pr上的投影點,f表示相機的焦距,T表示攝像頭中心距,L表示P點到相機平面的垂直距離,由上式可以看出,L與視差的大小有關,相機距離物體越近時精度越高[6]。
為得到上述中的理想模型,實驗平臺采用Bouguet算法,利用相機的內參、外參矩陣、畸變矩陣和兩攝像頭之間的旋轉和平移矩陣實現立體校正,并利用相機的重投影矩陣Q得到圖像中點的實際三維坐標。
(2)
其中,
(3)

2 激光切割教學實驗平臺的搭建
本實驗平臺的設計主要包括切割平臺機械結構的設計和元器件的布置、軟件及硬件設計等。
2.1 實驗平臺機械結構的設計和元器件的布置
由于牙齦線的空間性復雜,為保證切割動作的穩定型與準確性,本文設計了具有6個自由度的激光切割平臺,實物如圖4所示。
從圖4可以看出,該實驗平臺由激光切割機、旋轉拍照裝置兩部分組成。在旋轉拍照裝置中,由步進電機帶動載物平臺旋轉,并在載物平臺轉動固定的角度后由上位機控制相機對載物平臺進行拍照;激光切割機則由升降結構、H型結構及激光切割手臂組成,升降結構中,升降板與絲桿相連接,通過絲桿傳動實現升降板在Z方向上的上下移動。切割手臂則直接安裝在H型結構上,由H型結構帶動切割手臂在X、Y方向上移動。同時,切割手臂由2個旋轉關節和一個激光切割末端組成,實現激光頭在空間上繞Z軸和旋轉軸垂直于Z軸方向的旋轉。
在對牙齒模型切割過程中,激光切割機構沿曲線的切割主要通過載物平臺的上下移動、切割手臂的左右平移、旋轉關節的旋轉及激光頭的開閉4種動作來實現。在激光頭移動到第一個切割位置前,通過在原坐標基礎上增加適當的偏移量來保證激光聚焦在曲線上。隨后通過升降板Z方向上的上下移動和H型結構X、Y方向上的左右平移完成兩個點之間的相對移動。為保證切口光滑,切割手臂末端中心線的方向為距切割點最近(包括切割點)且不在同一直線上的三個點組成的平面的法線方向,并通過計算前后兩次法線的夾角來控制切割手臂各關節的旋轉。最后,激光切割系統根據控制指令控制切割機構完成一系列的旋轉、平移操作, 從而實現對牙齒模型沿牙齦曲線的切割。
在激光切割系統各組成機構中,H型結構是由4組步進電機、光軸、皮帶、移動塊及配套齒輪等組成的一種對稱性的機構,如圖5所示。
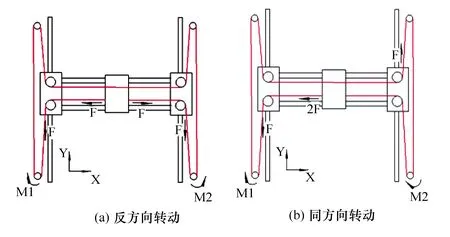
圖5 H型結構圖
由圖5可以看出,H型結構是一個以光軸作為構架的兩自由度結構,由一條H型同步帶連接兩個驅動輪和X軸移動滑塊,激光切割手臂固定在X軸移動滑塊上,Y軸移動塊帶動X軸在Y方向上平移,兩個獨立的步進電機固定在機架上,驅動兩個驅動輪。這種將驅動電機與傳動軸相分離的結構,大大減小了運動結構的負載,使運動負載輕量化,運動更為輕快平穩。
如圖5(a)所示,在H型結構中,當兩個步進電機反方向轉動時,同步帶張緊,在轉速相同情況下,X方向皮帶張緊所生成的力F將被抵消,末端執行器向著Y方向的負向移動。同理,如圖5(b)所示,當兩個步進電機同方向轉動時,在轉速相同情況下,Y方向的力被抵消,末端執行器會向著X方向的反方向移動。因此通過控制兩個步進電機的轉動速度,使步進電機轉動方向同向或者反向便可控制末端執行器的移動方向;通過改變兩個步進電機的速度差,可使末端執行器到達任意位置。
2.2 實驗平臺的硬件設計
本實驗平臺的硬件系統主要由控制系統模塊、電源模塊、電機驅動模塊、激光控制模塊組成。在Ramps1.4電路板的基礎上通過修改得到的電路板原理圖如圖6所示。在硬件組成結構中,控制系統是整個激光切割系統的控制中心,負責上位機與下位機之間的命令傳輸及信息交換,并根據指令控制電機以及舵機運動。選用Arduino Mega2560作為控制器,具有54路數字輸入/輸出口,能夠滿足信息傳輸和電機驅動的需要。
在實驗平臺傳動結構中,X、Y、Z軸及旋轉拍照裝置中的電機選用42步進電機,由于電機轉動的步數會影響整個切割機構的執行精度,所以選擇使用A4988微步電機驅動器驅動42步進電機,采用16細分,最小可轉動的角度是1.8/16=0.112 5°。機械手臂腕關節處的舵機采用轉角為300°,扭力為20 kg/cm的MG99R數碼舵機。
基于場效應管可以作為電子開關的特性,在對牙齦線的切割過程中,實驗平臺使用STP55NF06L場效應管來控制激光的開閉及散熱風扇的轉動。
在實驗平臺中,共使用6 V、12 V兩種電源電壓,通過使用S-250-12穩壓電源給電路板供電進而驅動步進電機轉動并給激光頭供電,同時通過12 V轉5 V電壓驅動舵機轉動。
2.3 實驗平臺的軟件設計
實驗平臺的軟件設計主要包括對牙齦線圖像的處理和對牙齦線坐標的測量,其中牙齦線坐標的測量過程主要包括主要分為相機標定、立體校正、圖像匹配、距離計算等4個部分[6]。
2.3.1 相機的標定與立體校正
實驗平臺在距離測量時采用雙目平行的視覺模型,原理如1.2部分所述,由于實際中基本上不可能實現兩臺攝像機像平面精確位于同一平面上的情況,所以在雙目視覺測量中,需要確定攝像機的內部參數及雙目傳感器的結構參數[7],并利用相機的內參、外參矩陣、畸變矩陣和兩攝像頭之間的旋轉和平移矩陣實現立體標定,進而求得視差。由文獻[8]和[9]得知:
相機的內參矩陣
(4)
旋轉矩陣
(5)
平移矩陣
(6)
在求取相機參數的過程中,基于張正友提出的平面模板兩步法,利用已知坐標點的平面標靶,在攝像機中多方位成像,進行最小二乘求解攝像機的內外參數及畸變系數,該方法過程簡單、且精度較高,被廣泛使用[10]。本實驗平臺采用了這種這種方法,使用Matlab標定工具箱分別對兩個攝像頭進行標定,然后通過立體標定,得到兩個攝像頭經校正后各自的內參、外參矩陣、畸變矩陣和兩攝像頭之間的旋轉和平移矩陣。最后使用OpenCV并利用上述得到的參數矩陣將攝像機拍攝到的每對圖像進行立體校正。
2.3.2 圖像的匹配
在圖像匹配的過程中,只需匹配出已標記切割曲線上的點即可, 為減少匹配不確定性, 提高匹配效率, 實驗平臺在匹配過程中采用極線約束、唯一性約束、視差連續性約束、幾何相似性約束等4個約束假設[11-12],圖像匹配過程如圖7所示。
由圖7可知,首先對照相機拍攝到的左右圖片進行立體校正和灰度化處理。其次,為得到切割曲線上的特征點,對灰度化后的左、右圖片(本小節下文中所指的左、右圖片均為灰度化后的左、右圖片)分別進行兩種不同的處理。第一種處理首先對左圖進行閾值化處理,然后采用快速并行細化算法對其進行細化處理,從而得到細化后的圖片及曲線骨架上各點(A)的圖像坐標。由文獻[13]可知,在特征點的匹配過程中,應尋找重復率及準確性高的特征點。由于細化后的圖片丟失了大量的圖片信息,為了獲取足夠多相匹配的特征點,第二種處理仍以灰度化后的左、右圖片為處理對象,首先通過SUFT算法得到圖片中牙齒圖像上相匹配的特征點,然后使用RANSAC算法剔除誤匹配點。基于極線約束假設,最后通過比較匹配點的縱坐標進行篩選從而獲得左圖中特征點(B)的圖像坐標與右圖中相匹配的特征點(C)的圖像坐標。
當完成上述處理后,將以上兩種不同處理得到的結果進行比較,由于實際物體上各點間的位置關系不變,作為初次篩選,通過尋找左圖上點(A)中與特征點(B)橫坐標相同的點作為左圖中新的匹配點(D),并基于極線約束假設,在右圖中尋找與特征點(C)縱坐標、點(D)橫坐標相同的點作為右圖新的匹配點(E)。為了能獲得更為準確的匹配點,第二次篩選利用SAD算法在點(E)附件的視察范圍內再次進行尋找與點(D)相匹配的點,從而得到了右圖中更為精確的匹配點的圖像坐標。
最后,本文通過檢查左、右圖中特征點的位置關系來判斷誤匹配點的有無及多少,并通過調節第二步SUFT算法中匹配結果的距離范圍的系數和縱坐標比較的范圍來得到最終滿意的匹配點。以最終得到的匹配點為基點,將切割曲線重新劃分成新的若干個小曲線段,再次利用SAD算法并通過比較各小曲線段上其余點與已知匹配點的位置關系來縮小SAD算法的搜索范圍,進而完成當前圖像中的曲線段上各點的匹配。
本實驗平臺在前后兩次拍攝的圖像中,通過調節載物平臺轉動的角度使相鄰的兩幅圖像部分重合,并通過匹配點的描述找到兩幅圖像中相同的特征點,從而以這些特征點為基點,將完整的切割曲線拼接出來。
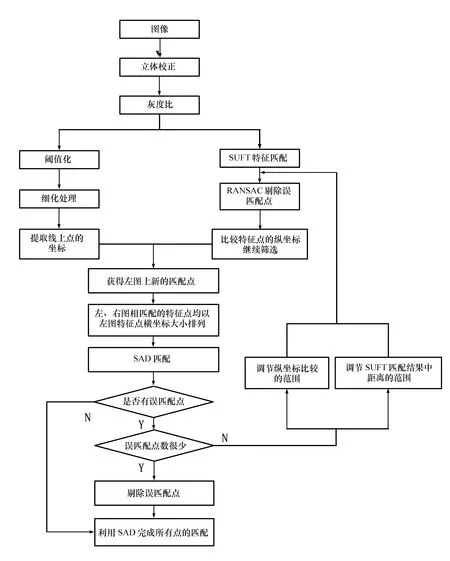
圖7 圖像匹配流程圖
3 實驗流程與結果分析
該實驗平臺的實驗流程主要分為以下3個部分:
(1) 雙目相機的標定實驗;
(2) 牙齦線的坐標的測量實驗;
(3) 實驗平臺的組裝及控制實驗。
3.1 雙目相機的標定實驗
在相機參數的測量過程中,采用平面模板兩步法,使用Matlab標定工具箱完成兩個攝像頭的單獨標定及兩攝像頭間的立體標定。采用型號為KS861,焦距可變的CCD相機,標定模板采用角點數為6 mm×7 mm的棋盤,棋盤格大小為5 mm×5 mm。在不同的位置共采集了17組大小為640 mm×480 mm的圖片。標定模板簡圖如圖8所示。
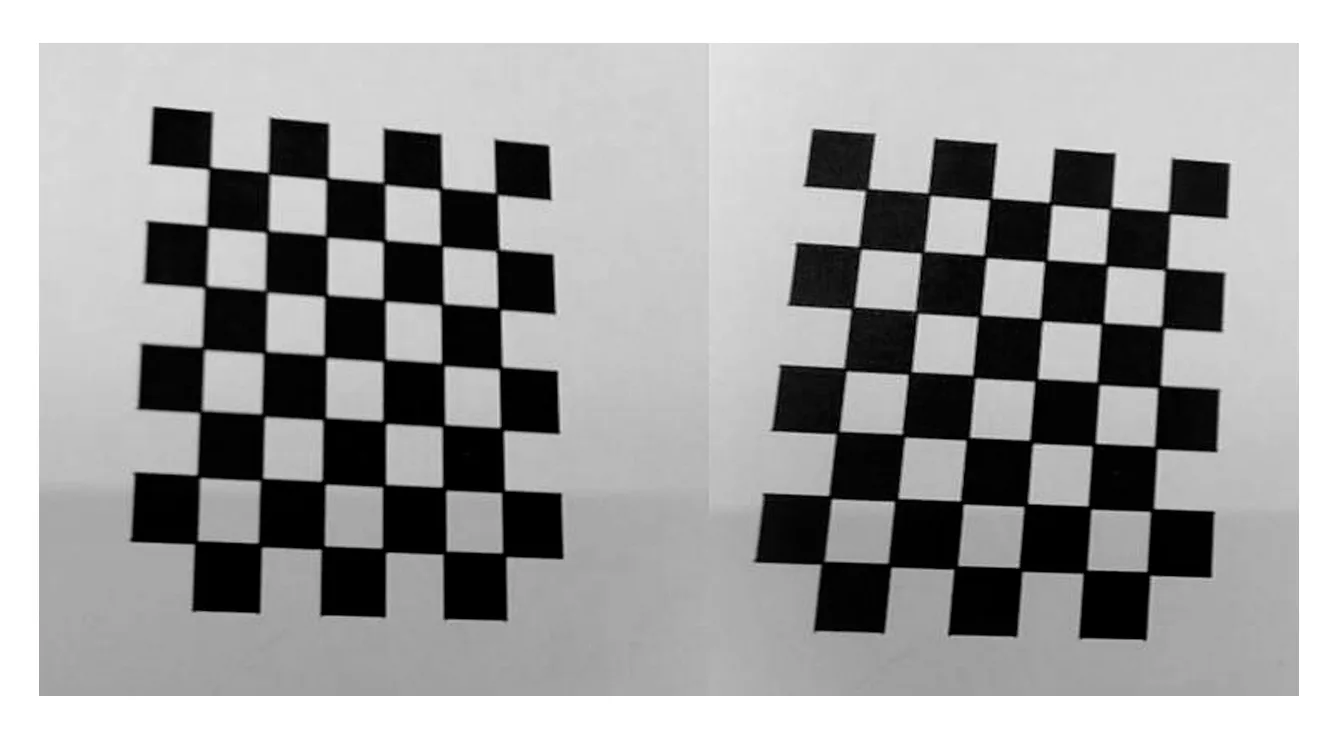
圖8 標定模板簡圖
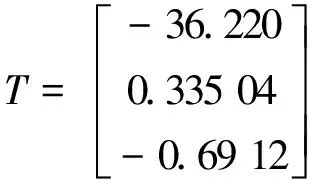
通過相機標定,得出攝像機內部參數的結果如表1所示。
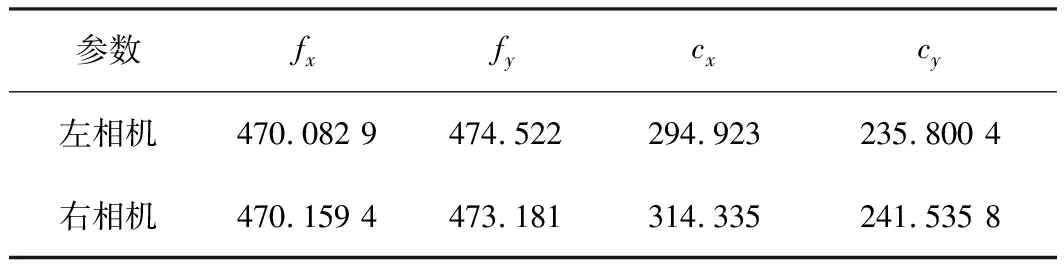
表1 相機參數
得到的相機間的旋轉矩陣R及平移矩陣T為:

3.2 牙齦線的坐標的測量實驗
該教學實驗平臺切割的牙齒熱壓模型如圖9所示。

圖9 牙齒熱壓模型圖
在對圖像采集的過程中,應保持相機水平,為使測量結果有較高的精度,應在避免出現遮擋的情況下,盡量使相機靠近牙齒模型,同時應盡量使相機拍攝的圖像中有較多的重疊區域。
為保證曲線上各點匹配的正確性,應盡量用細且黑的曲線來標記牙齦曲線,同時,在拍照的過程中,應使標記曲線附近沒有其他明顯的黑色物體干擾,必要時應使用光源補光。標記后牙齒熱壓模型如圖10所示。測量后的牙齦線坐標在相機坐標系下如圖11所示。X、Y平面坐標及貝塞爾擬合曲線如圖12所示。從測量結果看,在只保留中間部分的有效點后,測得牙齦線有效長度X方向上為7.64 mm,Y方向上為1.545 mm,Z方向上為1.053 mm,符合實際情況。由于在激光切割中,Z方向上的少許誤差對切割效果的影響可以忽略不計,將實際測量誤差和標定誤差考慮在內,所得的牙齦線坐標的測量結果達到了實驗的要求。

圖10 標記后牙齒熱壓模型圖

圖11 相機坐標系下牙齦線坐標圖
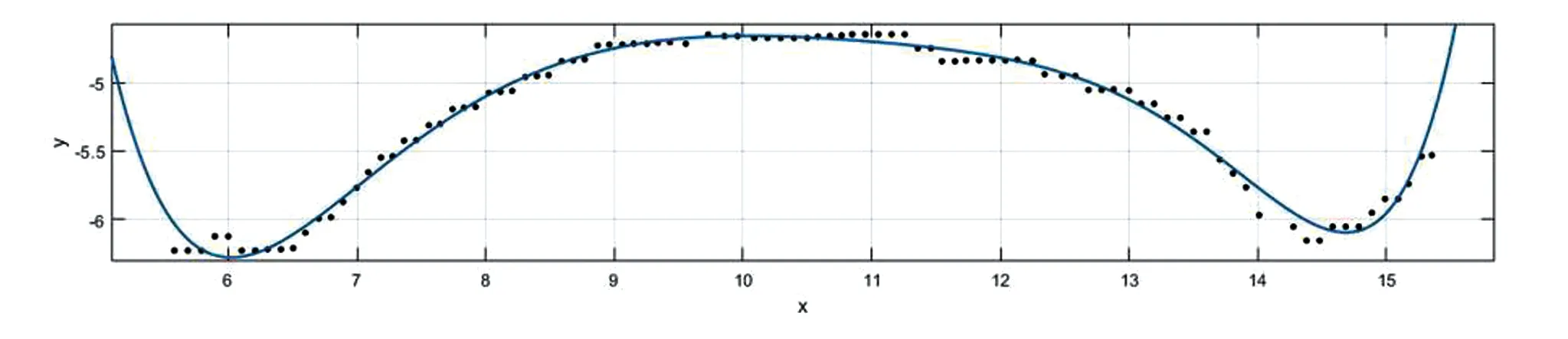
圖12 X、Y平面貝塞爾擬合曲線圖
獲得牙齦線坐標是整個牙齒熱壓模型切割過程中十分關鍵的一步。上述測量得到的結果為相機坐標系下的坐標,在相機坐標已知的情況下,完成上述測量后,再通過坐標轉化將其轉化為實際切割平臺坐標系中的坐標,并將轉化后的坐標輸入控制指令系統,通過逆運動學分析得到各軸需旋轉的角度,從而生成控制指令,在此基礎上,即可完成牙齦線的切割工作。
4 結語
本文設計的基于雙目測距原理的多自由度牙齒熱壓模型激光切割教學實驗平臺通過雙目測距技術實現了對牙齒模型中牙齦曲線實際坐標的獲取,并通過五軸聯動實現了沿牙齦曲線的切割。該過程直觀地展示了多自由度切削機構的工作原理與雙目測距技術在現代切削裝備中的實際應用。學生通過對該教學實驗平臺的實際組裝與操作,能較好地認識和熟悉多種機械結構的運動機理,掌握系統中步進電機、舵機、限位開關等元器件的結構特點和使用方法,了解雙目測距技術的原理及圖像采集與處理的過程,豐富了學生在學習階段對“切削原理與刀具”“現代制造技術”“機電信息檢測與處理技術”等相關課程的整體認識與理解,達到了良好的實驗教學效果。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
