艦船自動(dòng)舵教學(xué)訓(xùn)練輔助系統(tǒng)設(shè)計(jì)
2019-04-02 09:32:08馬海瑞鐘云海胡宏?duì)N
實(shí)驗(yàn)室研究與探索 2019年2期
馬海瑞, 鐘云海, 胡宏?duì)N, 蔡 烽
(海軍大連艦艇學(xué)院 航海系,遼寧 大連 116018)
0 引 言
自動(dòng)舵是艦船重要的助航儀器,可根據(jù)航差角(羅經(jīng)等導(dǎo)航設(shè)備提供的艦船實(shí)際航向與指令航向之差)以及航速、海況和裝載等參數(shù)進(jìn)行適當(dāng)?shù)倪\(yùn)算后,控制舵機(jī)擺動(dòng)舵葉,從而自動(dòng)保持或改變艦船的航向[1-3]。自動(dòng)舵實(shí)驗(yàn)室用于訓(xùn)練學(xué)員熟悉自動(dòng)舵的結(jié)構(gòu)、原理及工作過程,掌握艦船操縱的一般規(guī)律,為作戰(zhàn)訓(xùn)練航行中實(shí)施各種復(fù)雜機(jī)動(dòng)奠定基礎(chǔ)。但實(shí)驗(yàn)室條件下,一般較難具備舵機(jī)執(zhí)行機(jī)構(gòu)和實(shí)船參與的自動(dòng)舵工作環(huán)境,缺少真實(shí)航向信號激勵(lì)和舵角信號反饋[4-5],無法實(shí)現(xiàn)航向自動(dòng)和舵角隨動(dòng)等基本操縱科目的訓(xùn)練[6-7],限制了裝備教學(xué)效能的發(fā)揮。
為解決上述問題,以訓(xùn)練科目實(shí)戰(zhàn)化為目標(biāo),設(shè)計(jì)自動(dòng)舵教學(xué)訓(xùn)練輔助系統(tǒng)(以下簡稱輔助系統(tǒng)),通過調(diào)用艦船運(yùn)動(dòng)數(shù)學(xué)模型模擬自動(dòng)舵在海上的實(shí)際操縱環(huán)境,與實(shí)驗(yàn)室現(xiàn)有某型自動(dòng)舵裝備聯(lián)動(dòng)閉環(huán)運(yùn)行,能使學(xué)員熟悉艦船擺舵后的運(yùn)動(dòng)狀態(tài)變化規(guī)律,理解自動(dòng)舵各種操縱方式的適用時(shí)機(jī),掌握艦船的基本操縱性能,鍛煉應(yīng)對復(fù)雜操縱情況的能力。
1 自動(dòng)舵教學(xué)訓(xùn)練輔助系統(tǒng)工作原理
輔助系統(tǒng)主體功能結(jié)構(gòu)如圖1所示。基于便攜式工控機(jī)構(gòu)建教學(xué)訓(xùn)練控制臺,在控制軟件中調(diào)用艦船運(yùn)動(dòng)數(shù)學(xué)模型,以初始航向、航速和艦位(經(jīng)緯度)為基礎(chǔ),通過設(shè)定艦船主機(jī)速級控制艦船航速變化,并利用采集的舵角反饋信號進(jìn)行艦船運(yùn)動(dòng)參數(shù)解算,將實(shí)時(shí)更新的航向信息通過RS-422串口形式輸出,經(jīng)數(shù)字-軸角模塊變換為自整角機(jī)轉(zhuǎn)角信號并進(jìn)行功率放大后,發(fā)送給自動(dòng)舵主控制器參與操舵控制并輸出舵令信號;設(shè)計(jì)適當(dāng)?shù)耐鈬布涌陔娐泛涂刂撇考捎弥绷魉欧妱?dòng)機(jī)作為執(zhí)行機(jī)構(gòu)帶動(dòng)模擬舵葉擺動(dòng),舵角信息經(jīng)反饋發(fā)送器反饋至控制臺和自動(dòng)舵主控制器用于計(jì)算舵差角;將實(shí)時(shí)舵角、航向、艦位以數(shù)字和曲線圖的方式在軟件界面中顯示,并按照NMEA 0183協(xié)議將經(jīng)緯度、航速和航跡向等信息組織為標(biāo)準(zhǔn)語句,通過RS-422等串口形式向電子航海圖系統(tǒng)等外部設(shè)備發(fā)送。

圖1 輔助系統(tǒng)結(jié)構(gòu)與功能框圖
圖1中,“自動(dòng)舵”虛線框內(nèi)為實(shí)驗(yàn)室原有裝備組成,“電子航海圖系統(tǒng)”可接收輔助系統(tǒng)生成的NMEA 0183語句,以便制定與執(zhí)行計(jì)劃航線,直觀監(jiān)視自動(dòng)舵控制下的艦船航向、航速和航跡等運(yùn)動(dòng)響應(yīng),其余框圖為輔助系統(tǒng)的軟硬件功能結(jié)構(gòu)。
2 硬件設(shè)計(jì)
2.1 教學(xué)訓(xùn)練控制臺
教學(xué)訓(xùn)練控制臺為輔助系統(tǒng)的核心,實(shí)現(xiàn)初始參數(shù)裝定、車鐘速級設(shè)置、舵角信息采集和艦船運(yùn)動(dòng)參數(shù)解算輸出等主體功能。控制臺工控機(jī)的多個(gè)串口分別用于執(zhí)行采集舵角、輸出航向和輸出NMEA 0183語句等任務(wù);HDMI雙屏輸出支持在顯示器和投影屏幕上實(shí)時(shí)顯示訓(xùn)練參數(shù)和舵角、航向等動(dòng)態(tài)曲線;鼠標(biāo)鍵盤用于人機(jī)交互時(shí)的點(diǎn)選或輸入操作;雙網(wǎng)口可用于模擬綜合艦橋等后續(xù)網(wǎng)絡(luò)化功能擴(kuò)展。
2.2 羅經(jīng)信號單元
為滿足自動(dòng)舵的接口要求,輔助系統(tǒng)中的艦船航向信號應(yīng)與真實(shí)羅經(jīng)裝備具有相同的電氣特性[8]。實(shí)驗(yàn)室某型自動(dòng)舵主控制器僅能接收自整角機(jī)轉(zhuǎn)角形式的航向信號,而控制臺根據(jù)艦船運(yùn)動(dòng)模型解算出的航向信息為包含在串行通信語句中的數(shù)字量,需經(jīng)變換后才可發(fā)送給自動(dòng)舵。
圖1中航向信號轉(zhuǎn)換模塊用于接收來自控制臺的數(shù)字航向信號,通過微處理器解析并轉(zhuǎn)換成12位并行數(shù)字量后送給DSC模塊形成自整角機(jī)信號,發(fā)送給航向信號功放模塊。
航向信號功放模塊將來自航向信號轉(zhuǎn)換模塊1°/轉(zhuǎn)的自整角機(jī)信號經(jīng)耦合變壓器送入放大板的輸入端,經(jīng)放大后通過變壓器輸出至分羅經(jīng)控制繞組的連接器端,驅(qū)動(dòng)自動(dòng)舵上的航向分羅經(jīng)工作。放大板輸出回路中裝有保險(xiǎn)絲,可防止功放器件因過載而損壞。
2.3 模擬舵機(jī)和舵葉
實(shí)際艦船多采用液壓舵機(jī)系統(tǒng),通過2個(gè)電磁閥控制液體流向,從而控制舵葉的擺動(dòng)方向[9]。輔助系統(tǒng)通過2個(gè)多觸點(diǎn)繼電器代替電磁閥控制直流伺服電動(dòng)機(jī)帶動(dòng)模擬舵葉轉(zhuǎn)動(dòng),從而模擬舵機(jī)油泵及活塞的正反向運(yùn)動(dòng);舵角的大小和方向通過舵角反饋發(fā)送裝置檢測并轉(zhuǎn)換為RS-485形式的信號,輸出至自動(dòng)舵主控制器和教學(xué)訓(xùn)練控制臺參與控制和解算。在模擬舵葉擺動(dòng)行程兩端設(shè)置左右限位開關(guān),用于將舵葉擺幅限制在左右35°的滿舵舵角范圍內(nèi)。
3 軟件設(shè)計(jì)
控制軟件內(nèi)嵌運(yùn)行于教學(xué)訓(xùn)練控制臺,其界面可根據(jù)功能劃分為初始參數(shù)裝定、車鐘速級設(shè)置、參數(shù)監(jiān)視和運(yùn)行控制等區(qū)域,如圖2所示。該軟件在圖形化編程環(huán)境LabVIEW中開發(fā),并采用狀態(tài)機(jī)設(shè)計(jì)模式。各狀態(tài)分支在執(zhí)行某項(xiàng)操作后,通過向While循環(huán)的移位寄存器傳遞指令的方式指定狀態(tài)機(jī)的下一個(gè)狀態(tài)。初始化完成后,狀態(tài)機(jī)轉(zhuǎn)移至“等待事件”狀態(tài),該狀態(tài)通過事件結(jié)構(gòu)等待用戶界面操作。如用戶單擊“裝定航向”按鈕或改變“左車”速度等級時(shí),會(huì)切換至事件結(jié)構(gòu)的相應(yīng)分支,繼而由該分支按照預(yù)定的決策邏輯發(fā)起狀態(tài)轉(zhuǎn)移。該模式便于定義各代碼段的執(zhí)行序列[10],且代碼段可按需隨意增減,可避免功能擴(kuò)充時(shí)程序結(jié)構(gòu)的大幅改動(dòng)。
控制臺軟件完成的主要任務(wù)如下:

圖2 控制軟件主界面
(1) 參數(shù)裝定。裝定初始航向、航速和艦位等艦船初始參數(shù),設(shè)置主機(jī)速級,支持分車或錯(cuò)車運(yùn)行。
(2) 舵角信號采集。通過RS-485串口接收舵角反饋發(fā)送裝置送來的舵角信號。
(3) 艦船運(yùn)動(dòng)參數(shù)更新解算。根據(jù)艦船運(yùn)動(dòng)數(shù)學(xué)模型計(jì)算航向、航速、航跡向及推算實(shí)時(shí)艦位。
(4) 航向信號發(fā)送。通過RS-422串口向航向信號轉(zhuǎn)換模塊中的單片機(jī)系統(tǒng)發(fā)送數(shù)字航向信息。
(5) 運(yùn)行控制。通過界面中的相應(yīng)的功能按鈕控制輔助系統(tǒng)在運(yùn)行、暫停和停止等狀態(tài)間切換。
(6) 綜合顯示。用數(shù)值控件顯示各種裝定參數(shù)、實(shí)時(shí)運(yùn)行參數(shù);用圖形控件顯示舵角變化曲線、航向變化曲線和艦船航跡線等。通過RS-422串口輸出的符合標(biāo)準(zhǔn)協(xié)議的語句可用于激勵(lì)電子航海圖系統(tǒng)或?qū)Ш絻x,便于執(zhí)行設(shè)計(jì)的計(jì)劃航線并監(jiān)視自動(dòng)舵控制下的艦船航跡。圖2中航跡線為模擬某型艦在舟山海區(qū)占領(lǐng)陣位和旋回機(jī)動(dòng)時(shí)的運(yùn)動(dòng)軌跡;圖3為“兩車進(jìn)三”速級時(shí)自動(dòng)操縱方式下航向受舵角控制的PID曲線。
3.1 艦船運(yùn)動(dòng)參數(shù)解算
艦船運(yùn)動(dòng)參數(shù)解算是通過調(diào)用艦船運(yùn)動(dòng)數(shù)學(xué)模型實(shí)現(xiàn)的。輔助系統(tǒng)采用艦船5自由度機(jī)動(dòng)模型[11],調(diào)用的主要函數(shù)見表1[12]。



圖3 舵角與航向曲線
艦位更新模塊根據(jù)墨卡托投影海圖的特點(diǎn),將航速按航跡向的正余弦分解為北向和東向分量,在參數(shù)解算循環(huán)周期內(nèi),將東西距與中分緯度進(jìn)行運(yùn)算,得到本周期的艦位緯差和經(jīng)差,與循環(huán)起始時(shí)刻的艦位疊加得到艦船實(shí)時(shí)經(jīng)緯度,其LabVIEW程序代碼如圖4所示。

圖4 艦位更新解算程序代碼
3.2 計(jì)劃航線執(zhí)行與監(jiān)視
為便于設(shè)計(jì)計(jì)劃航線,輔助系統(tǒng)的輸出信息兼容衛(wèi)星導(dǎo)航儀和電子航海圖系統(tǒng)。通過與二者的有機(jī)整合,可在充分研究海區(qū)的前提下,直接在其海圖顯示區(qū)根據(jù)海區(qū)情況和想定方案準(zhǔn)確、方便地制訂航行計(jì)劃,還可進(jìn)行高效的航線檔案管理和航線安全性評估。
實(shí)驗(yàn)室某型電子航海圖系統(tǒng)的數(shù)據(jù)接口采用遵守NMEA 0183協(xié)議的GPRMC語句,形如[13]:
$GPRMC,113842.00,A,3610.11167,
N,12046.14011,E,18.059,124.6,
080817,5.0,E,A*0F
該語句包括時(shí)間、緯度、經(jīng)度、航速、航向、日期、磁差、定位狀態(tài)和校驗(yàn)碼等數(shù)據(jù)段。
程序調(diào)用數(shù)值函數(shù)將經(jīng)緯度分離為度分秒并轉(zhuǎn)換為構(gòu)造語句所需格式,配合字符串函數(shù)將其他信息整合并校驗(yàn)[14],其LabVIEW程序代碼如圖5所示。
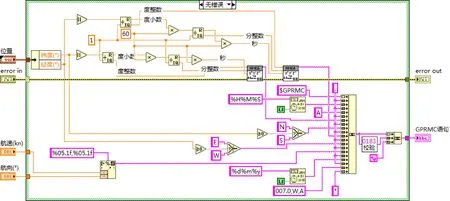
圖5 GPRMC語句生成程序代碼
針對開闊海域直航、狹水道、離靠碼頭、頻繁機(jī)動(dòng)和導(dǎo)彈火炮攻擊等不同時(shí)機(jī),可結(jié)合自動(dòng)舵的自動(dòng)、隨動(dòng)和簡單等多種操縱方式靈活地設(shè)置訓(xùn)練科目內(nèi)容。在計(jì)劃航線執(zhí)行的訓(xùn)練過程中,支持到達(dá)報(bào)警、偏航指示與報(bào)警功能,使學(xué)員掌握航線執(zhí)行、偏航處理、到達(dá)轉(zhuǎn)向點(diǎn)處理和航線臨時(shí)調(diào)整等各種態(tài)勢下的應(yīng)急處置能力[15]。
3.3 串口通信
串口是輔助系統(tǒng)信息交互過程中采用的主要通信方式,包括教學(xué)訓(xùn)練控制臺采集自動(dòng)舵反饋舵角、向航向信號轉(zhuǎn)換模塊發(fā)送航向以及向電子航海圖系統(tǒng)發(fā)送NMEA語句等。以舵角采集程序?yàn)槔肔abVIEW VISA串口函數(shù)讀取舵角反饋發(fā)送裝置以RS-485協(xié)議發(fā)出的舵角語句。因每次舵角更新時(shí)語句均以CR/LF(回車/換行)字符結(jié)尾,故在“VISA配置串口”函數(shù)調(diào)用時(shí)啟用了終止符0xA(換行符的16進(jìn)制表示)[10],以保證每次均能讀得完整語句,其基本程序框圖如圖6所示。

圖6 采集舵角串口通信程序
此外,在狀態(tài)機(jī)的“錯(cuò)誤處理”分支,針對串口數(shù)據(jù)幀異常、讀取超時(shí)等常見錯(cuò)誤進(jìn)行處理,必要時(shí)直接遷移至“初始化”或“等待事件”分支并向用戶發(fā)出提示,提升串口通信模塊的可靠性和人機(jī)交互的友好程度。
4 結(jié) 語
輔助系統(tǒng)通過科學(xué)合理的設(shè)計(jì),將自動(dòng)舵、電子海圖等實(shí)驗(yàn)室裝備無縫整合,顯示直觀、操作簡便、運(yùn)行穩(wěn)定,可通過控制臺顯示器和投影屏幕實(shí)時(shí)顯示舵角及自動(dòng)舵控制下的艦船航向、航跡變化曲線,直觀感受艦船操舵響應(yīng),還可通過電子航海圖系統(tǒng)細(xì)致觀察航線執(zhí)行情況,選用不同的艦船運(yùn)動(dòng)模型即可在實(shí)驗(yàn)室中實(shí)現(xiàn)不同艦型的操縱體驗(yàn),有效地實(shí)現(xiàn)了“自動(dòng)舵-艦船-羅經(jīng)”的閉環(huán)聯(lián)動(dòng)運(yùn)行,在不破壞自動(dòng)舵裝備原有結(jié)構(gòu)的前提下,從根本上解決了實(shí)驗(yàn)室無實(shí)船環(huán)境條件下進(jìn)行操舵訓(xùn)練的難題,為自動(dòng)舵操作使用和實(shí)戰(zhàn)化訓(xùn)練提供了良好平臺。已應(yīng)用于艦艇航海指揮等專業(yè)的課程教學(xué)訓(xùn)練,明顯提升了相應(yīng)科目教學(xué)的科學(xué)性和有效性,對于提高學(xué)員的任職能力具有很強(qiáng)的實(shí)用性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25