基于Cortex-M3的槽式太陽能熱發電自動追蹤系統
2019-04-02 09:13:40上海電力大學自動化工程學院韓萬里茅大鈞魏驁呂彬
太陽能 2019年3期
關鍵詞:系統
上海電力大學自動化工程學院 ■ 韓萬里*茅大鈞 魏驁 呂彬
0 引言
2016年12月22日,國家能源局發布《太陽能發展“十三五”規劃》,提出要積極推進太陽能熱發電產業化發展,到2020年年底,太陽能熱發電總裝機容量達到500萬kW,太陽能熱發電成本要低于0.8元/kWh。目前,太陽能熱發電方式主要有槽式、碟式、塔式和菲涅爾式4種。其中,塔式太陽能熱發電系統受地形限制,中心塔建造成本高,跟蹤系統復雜,目前僅限應用于偏遠地區的小型獨立供電方式;碟式太陽能熱發電系統與電網并網時的傳送電壓較低,規模小、成本高,目前尚無商業化規模運行的案例,僅處于示范階段;菲涅爾式太陽能熱發電系統的工作效率較低,熱損失大,作為剛開發成功的系統,目前只有小型項目在運行,僅處于商業化運行前期;而槽式太陽能熱發電系統的土地利用率高,可聯合運行,使用材料少,制造成本低,具有儲熱能力,已達到商業化發展的水平,是目前太陽能熱發電系統中最為成熟的一種發電方式,但其跟蹤系統的結構較為簡單,存在跟蹤精度差、跟蹤方式單一及跟蹤系統穩定性差等問題。因此,設計一種高精度、多追蹤模式、全方位、高穩定性的槽式太陽能熱發電自動追蹤系統,已成為一種必然趨勢。
1 槽式太陽能熱發電系統簡介
槽式太陽能熱發電系統的全稱為槽式拋物面反射鏡太陽能熱發電系統,其主要是采用大面積的槽式拋物面反射鏡陣列,將太陽光聚焦反射到線性接收器(集熱管)上,通過加熱管內工質,產生高溫蒸汽,進而驅動常規汽輪發電機組發電[1]。整個系統主要由4部分組成:槽式太陽能集熱器場、蓄熱與熱交換系統、輔助能源系統及動力發電系統等。圖1為槽式太陽能熱發電系統圖。
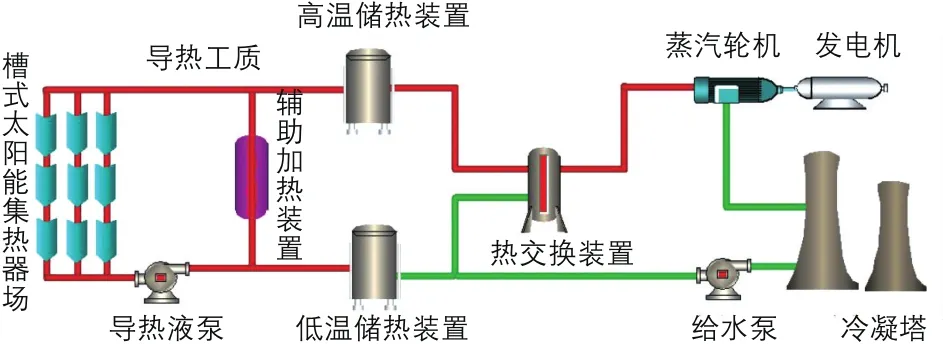
圖1 槽式太陽能熱發電系統圖
1.1 槽式拋物面太陽能集熱器
槽式拋物面太陽能集熱器是槽式太陽能熱發電系統的關鍵部件,主要包括聚光器、接收器和跟蹤系統等部分。槽式拋物面太陽能集熱器本質上是利用二維拋物線反射器線性平移得到光能,通過聚焦、反射和吸收等過程將光能轉化為熱能。圖2為槽式拋物面聚光器的原理圖[2]。
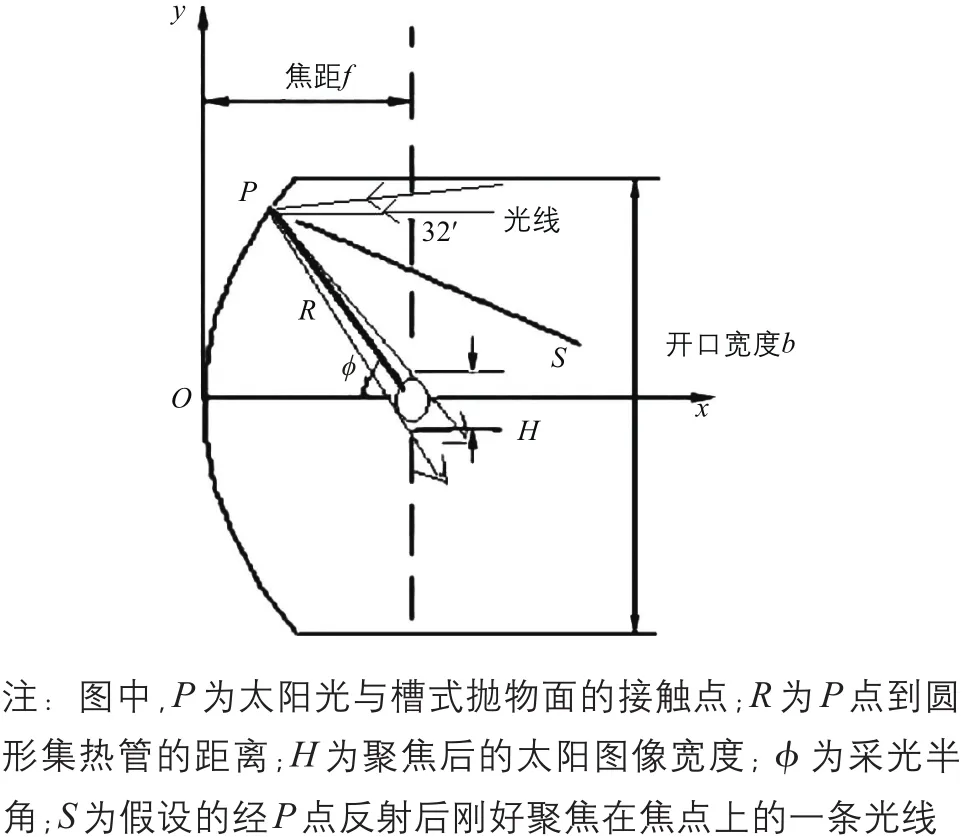
圖2 槽式拋物面聚光器的原理圖
槽式拋物面開口寬度b的大小決定了聚光器輸入的總能量。對于圓形聚光器而言,聚光器的聚光比C可表示為:

式中,d為集熱管直徑。
太陽光經拋物面反射后,能全部落到集熱管上的條件為:

式中,δs為太陽光線的半張角。
拋物線方程為:

式中, f為拋物線的焦距。
根據式(3)可求得集熱管的最小直徑dmin為:

1.2 槽式太陽能熱發電系統的跟蹤方式
槽式太陽能熱發電系統的跟蹤方式有單軸跟蹤和雙軸跟蹤兩種方式。單軸跟蹤方式一般采用東西向或南北向跟蹤,雖然采用該方式的系統機械結構簡單、易于維護,但其只能在方位角上跟蹤太陽,高度角上只能進行人工調節,且太陽入射角只能在特定時間內為零,所以其聚光性較低,跟蹤精度不高。雙軸跟蹤方式不僅可在方位角上對太陽進行跟蹤,也可在高度角上對太陽進行跟蹤,彌補了單軸跟蹤的劣勢,提高了追蹤精度,理論上可完全追蹤太陽的運行軌跡,使太陽的入射角為零,能有效提高集熱器的集熱效率,并可提高太陽能利用率。圖3為單、雙軸跟蹤方式原理圖。
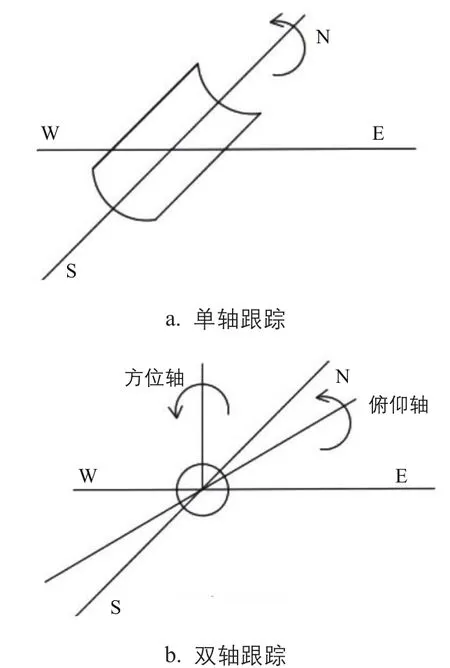
圖3 單、雙軸跟蹤方式原理圖
本文設計的基于Cortex-M3的槽式太陽能熱發電自動追蹤系統采用的是雙軸跟蹤方式。下文對該系統的硬件和軟件設計進行了詳細介紹。
2 系統硬件設計
本槽式太陽能熱發電自動追蹤系統的硬件部分主要由以Cortex-M3為核心的MCU追蹤控制單元、GPS模塊、實時時鐘電路、角度傳感器、風速傳感器、光電檢測模塊、信號處理模塊、電機驅動電路,以及步進電機等組成。系統結構框圖如圖4所示。
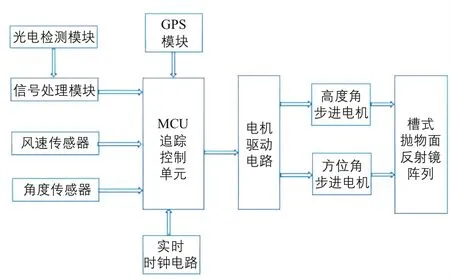
圖4 槽式太陽能熱發電自動追蹤系統結構框圖
2.1 MCU追蹤控制單元
本自動追蹤系統的MCU追蹤控制單元選用的是32位的微處理器Cortex-M3 LPC1800,其具有成本低、性能高、功耗低、中斷反應超快、效率高等特點。該微處理器具有高達180 MHz穩定的工作頻率,最高1 MB雙片內Flash和200 kB片內 SRAM,2個獨立序列的 8通道 10位ADC,轉換速率為400 ksps和最高多達164個I/O接口,能完全滿足太陽能熱發電自動追蹤系統的要求。
2.2 光電檢測模塊
光電檢測模塊是通過光電二極管將光的變化量轉化為相應的光電流,再經過電流放大和電壓變換轉換為系統所需的信號。本文在傳統光電檢測電路的基礎上,設計了一種新型的光電檢測電路,如圖5所示。
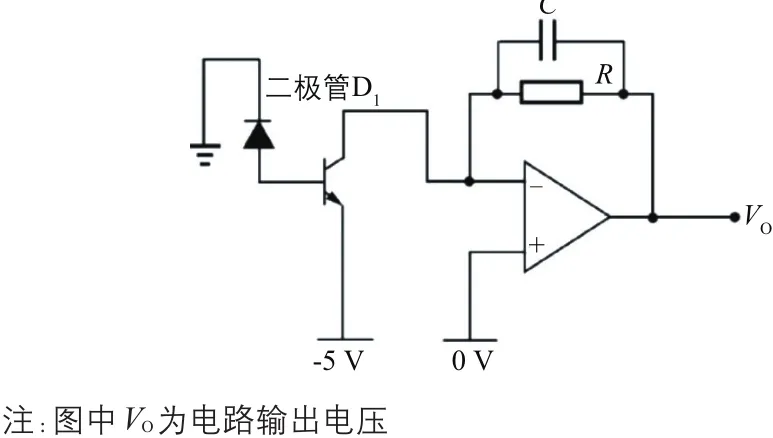
圖5新型光電檢測電路圖
圖5 中,在傳統光電檢測電路的基礎上,新型光電檢測電路在光電二極管輸出和放大器輸入之間增加了一個三極管,將電流進行前置放大。這樣既保證了較高的信噪比,又提高了響應速度,同時也減小了傳統光電檢測電路的自激振蕩現象,提高了系統的穩定性。
2.3 實時時鐘電路設計
本自動追蹤系統的實時時鐘電路選擇的是美國Dallas公司推出的一種低功耗的實時時鐘芯片DS1302。它可以對年、月、周、日、時、分、秒等進行計時,具有閏年補償功能[3];工作電壓為2.0~5.5 V;內部有一個“31×8”的用于臨時性存放數據的RAM寄存器,I/O接口為時鐘控制接口,用于輸入跟蹤太陽的信號,如圖6所示。
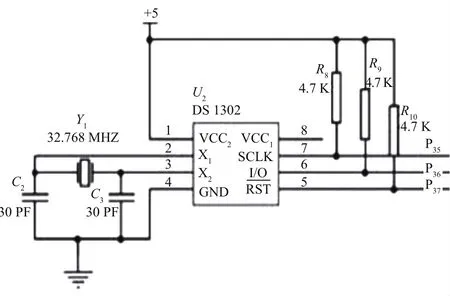
圖6 實時時鐘電路圖
2.4 電機驅動電路
本自動追蹤系統的電機驅動模塊選用的是LV8727驅動芯片。該芯片是一個PWM電流控制微步距角步進電機馬達芯片,采用雙橋MOSFET驅動,內置溫度保護及過流保護,最高耐壓為50 VDC,具有自動半流鎖定功能。該芯片不僅可以滿足步進電機對恒轉矩精確控制的要求,還可以降低控制系統的功耗,達到對步進電機精確控制的目的。圖7為電機驅動電路圖。
2.5 步進電機
步進電機是一種將電脈沖信號轉換為線位移或角位移的開環控制元件。電機停止的位置取決于脈沖信號的脈沖個數,轉速取決于脈沖信號的頻率,均不受負載變化的影響。步進電機具有定位精度高、控制簡單、無累計誤差和慣量低等特點,廣泛應用于各種自動化系統中,通常被用作定速控制和定位控制。
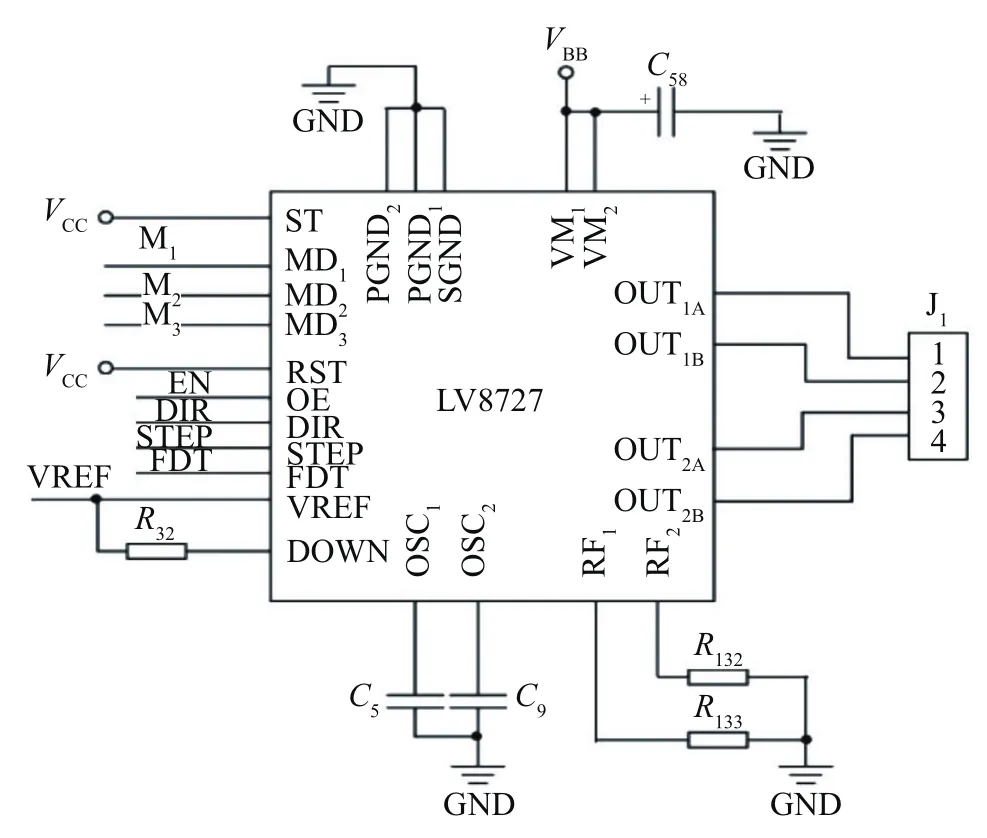
圖7 電機驅動電路圖
3 系統軟件設計
本自動追蹤系統是采用視日軌跡追蹤和光電追蹤相結合的雙軸跟蹤方式,先進行視日軌跡追蹤粗調,再進行光電追蹤精調,可提高太陽能的利用率。圖8為本槽式太陽能熱發電自動追蹤系統的主程序流程圖。
具體操作步驟為:
1)系統啟動后,首先對各模塊進行初始化操作,復位至起始位置;此時風速傳感器開始進行工作,若測得當前風速大于臨界值,自動追蹤系統判定當前風速可能對系統造成破壞,于是啟動自我保護程序,系統裝置平放,以減少大風對跟蹤裝置的破壞;系統經過30 min延時后,風速傳感器再次對當前風速進行測量。
2)若當前風速小于臨界值,追蹤系統從實時時鐘讀取當前時間。若當前時間是白天(08:00~18:00),追蹤系統將啟動視日軌跡追蹤模式;此時MCU追蹤控制單元通過GPS模塊得到本地當前的時間和經緯度等信息[4],然后根據內置的相關計算方法,計算出當前時刻太陽的理論高度角和方位角;同時角度傳感器實時測量太陽的實際高度角和方位角,便可得到理論值和實際值之間的誤差;MCU追蹤控制單元根據此誤差,計算出方位角步進電機和高度角步進電機應該轉動的脈沖數,通過電機驅動電路發出相應的電脈沖數,從而驅動步進電機的轉動,完成視日軌跡追蹤粗調。若當前時間是黑夜,追蹤系統將處于關閉狀態。
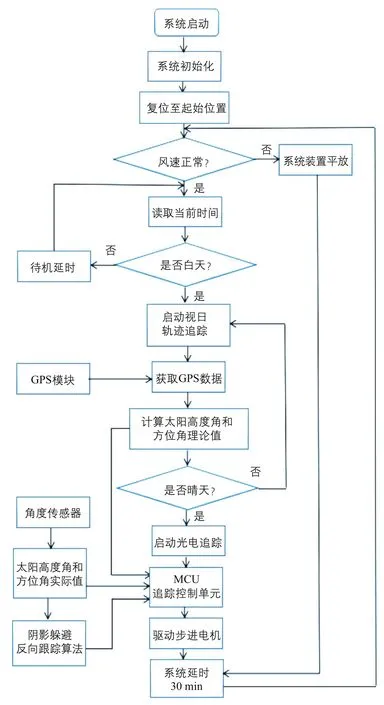
圖8 槽式太陽熱發電自動追蹤系統的主程序流程圖
3)下一步將進行晴、陰天的判斷。本自動追蹤系統通過光電檢測模塊,對當前時間的光照強度進行檢測,若當前的光照強度小于設定值,則追蹤系統判定當前天氣為陰天,繼續進行視日軌跡追蹤粗調;若當前光照強度大于設定值,則追蹤系統判定當前天氣為晴天,將啟動光電追蹤精調,追蹤系統通過光電二極管將光的變化量轉換為相應的微弱光電流信號,經信號處理模塊的處理和放大,得到較大的電壓信號,再通過A/D轉換電路轉換為相應的數字信號,傳輸到MCU追蹤控制單元中,經處理后,此時電機驅動電路發出相應的電脈沖信號,從而驅動高度角步進電機和方位角步進電機的轉動,完成實時的光電追蹤精調。
4)本自動追蹤系統的陰影躲避反向跟蹤算法,即根據GPS模塊提供的太陽實際的高度角和方位角自動計算陰影,啟動躲避時間,保證拋物面反射鏡始終與太陽保持一個最佳角度,互不干擾。系統啟動運行后,將循環檢測當前的天氣情況,間隔時間為30 min,以此來選擇合適的追蹤方式,保證本自動追蹤系統的實時性、準確性和經濟性。同時,為了應對長時間的雨雪等惡劣天氣,該系統還增加了輔助燃氣輪機組,以保證系統的穩定運行;而對于短時間的雨雪等天氣,系統可通過本身的蓄熱裝置來供給。
3.1 視日軌跡追蹤
視日軌跡追蹤是一種基于天文學參數的開環式主動追蹤方式,其所需的當前時刻的太陽高度角和方位角可由式(5)~式(7)求得。
太陽高度角α的計算式為:

式中,φ為當地地理緯度(GPS可直接測得);δ為太陽赤緯角;ω為太陽時角,以當地真太陽時正午為0°,上午時角為負,下午時角為正,每小時變化15°。
太陽方位角γ的計算式為:

太陽赤緯角δ的計算式為:

式中,dn為一年中某一天的順序數。
3.2 光電追蹤
光電追蹤是在太陽的光照強度達到一定值時,系統所啟動的一種追蹤模式。在光電追蹤過程中,追蹤系統將偏差電壓轉化為相應的脈沖個數,然后通過電機驅動電路驅動步進電機轉動,使拋物反射鏡鏡面垂直于太陽照射,保證最大限度地聚集太陽光。圖9為光電追蹤程序的流程圖。
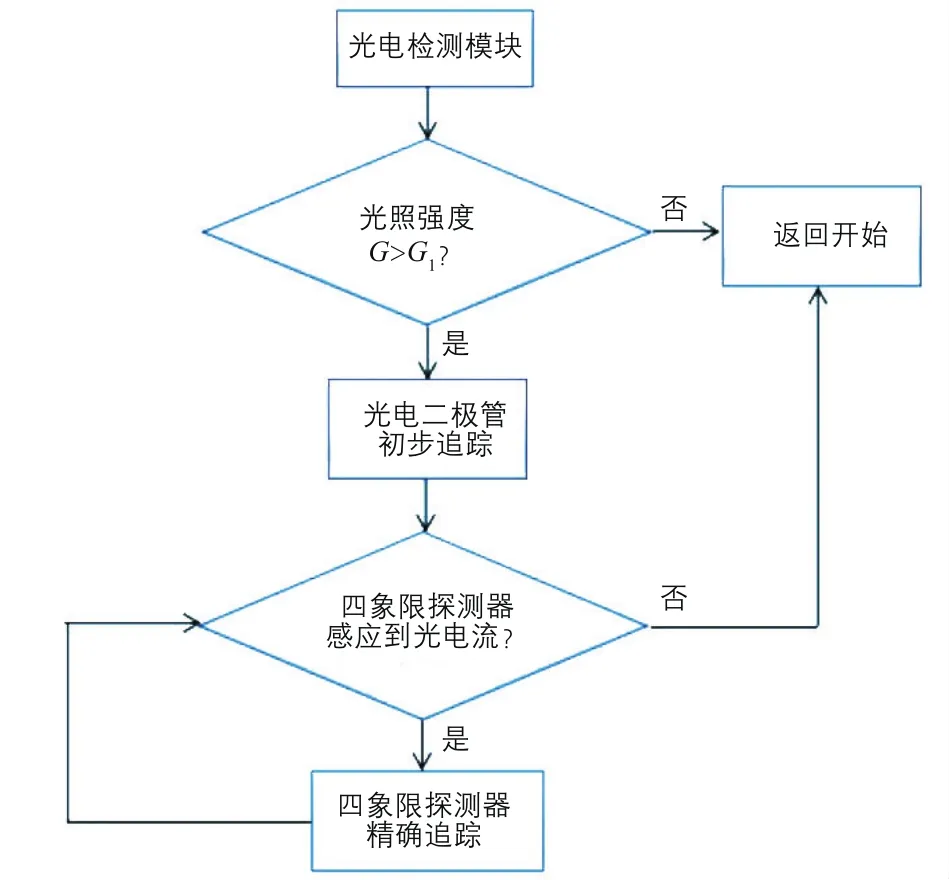
圖9 光電追蹤程序的流程圖
光電追蹤的流程為:首先光電檢測模塊通過光電二極管對當前的光照強度G進行檢測,當G大于光照強度的設定值G1時,追蹤系統將啟動光電二極管初步追蹤模式。若當前的拋物反射面未垂直對準太陽,遮光筒會出現較大的陰影面積,此時4個光電二極管所感應出的光電流大小不同,四象限探測器就會感應到光電流,追蹤系統將進入到四象限探測器精確追蹤模式,使追蹤系統始終與太陽保持在最佳角度。四象限探測器將作為系統的反饋環節,使系統的追蹤精度更高。
3.3 陰影躲避反向跟蹤算法
在大規模的拋物反射鏡陣列中,當太陽的高度角較低時,裝置與裝置之間勢必會出現遮擋現象,這就會造成后排拋物反射鏡對太陽光的聚光性降低,影響系統的光熱轉換效率,同時造成資源的浪費。本文所設計的自動追蹤系統采用了一種陰影躲避反向跟蹤算法,圖10為該算法的程序流程圖。
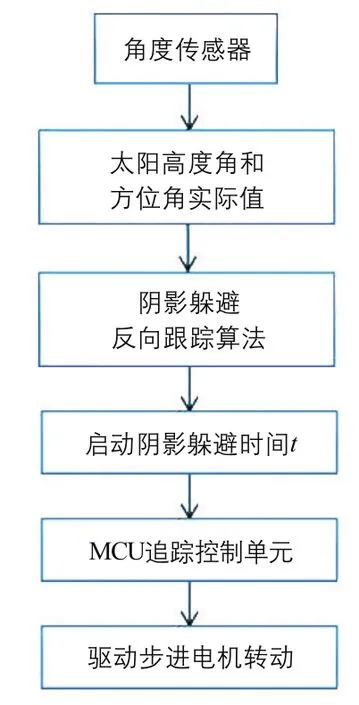
圖10 陰影躲避反向跟蹤算法的程序流程圖
陰影躲避反向跟蹤算法的流程為:首先,角度傳感器開始工作,MCU追蹤控制單元將得到太陽高度角和方位角的實際值;然后通過內置的陰影躲避反向跟蹤算法計算出陰影躲避的啟動時間;最后MCU追蹤控制單元通過電機驅動電路驅動步進電機的轉動,完成陰影躲避功能。
4 系統動態仿真與模擬
組態化的三維力控(Forcecontrol)軟件最大的特點是以靈活多樣的組態方式而不是編程方式來進行系統集成,其基本的程序及組件包括:實時數據庫、工程管理器、I/O驅動程序、人機界面、控制策略生成器,以及各種數據服務和擴展組件等。本文通過Forcecontrol軟件分別對固定式槽式太陽能熱發電系統和本文設計的自動追蹤系統進行了動態仿真模擬。圖11為槽式太陽能熱發電自動追蹤系統主界面圖,圖12為固定式與自動追蹤式輸出功率對比圖。
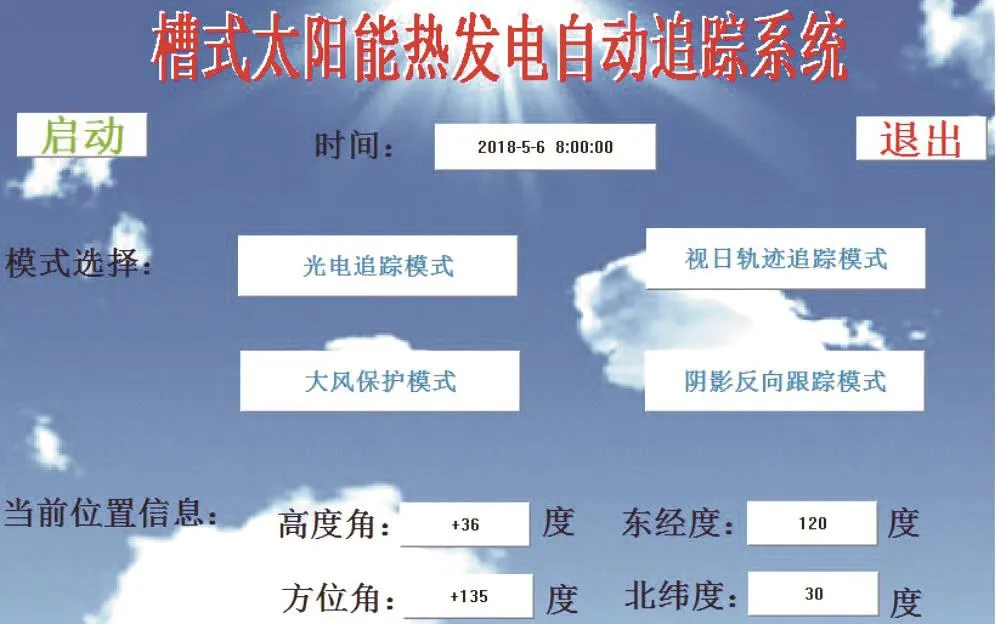
圖11 槽式太陽能熱發電自動追蹤系統的主界面圖
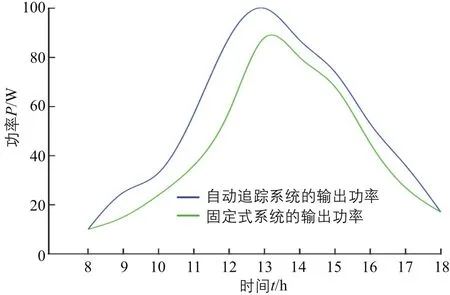
圖12 固定式與自動追蹤系統的輸出功率對比圖
由圖12可知,自動追蹤系統下的輸出功率大于固定式系統下的輸出功率,說明自動追蹤系統的效果較好。
5 結論
本文設計了一種基于Cortex-M3的槽式太陽能熱發電自動追蹤系統,其MCU追蹤控制單元以Cortex-M3為核心,采用光電追蹤和視日軌跡追蹤相結合的雙軸跟蹤方式,旨在提高追蹤系統的精度;增加的陰影躲避反向跟蹤算法,提高了追蹤系統的效率;增加的輔助燃氣輪機組,保證了追蹤系統的穩定性。然后通過Forcecontrol軟件對該自動追蹤系統進行了動態仿真模擬,結果顯示,自動追蹤系統下的輸出功率大于固定式下的輸出功率,為該自動跟蹤系統以后的商業化運行提供了一定的依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
