艦載無人直升機自主著艦方法研究
2019-03-30 02:53:46吳鵬飛石章松閆鵬浩
艦船科學技術 2019年3期
吳鵬飛,石章松,閆鵬浩
(1. 海軍工程大學,湖北 武漢 430033;2. 海軍航空大學,山西 長治 046000)
0 引 言
艦載無人直升機是裝備在艦船上的無人飛行器,主要用于執行戰場偵察、電子對抗、炮火校正、瞄準打擊、中繼制導等危險任務[1]。艦載無人直升機具有重量輕、體積小、無人員傷亡、部署方便等優點,可在復雜的氣象、海況條件下使用,且不受飛行人員體能消耗的局限。艦載無人直升機自主著艦是指無人直升機依賴機載的導航和控制系統來進行定位引導并最終控制其降落在艦船上的過程。自主著艦使無人直升機降低了對艦船輔助設備的要求,尤其在戰場環境下,艦船遭受打擊破壞時,更能體現出自主著艦具有的重要意義。
隨著現代海戰的發展,我國艦艇編隊的日益成熟,無人直升機自主著艦的技術需求越來越迫切,而國內目前對無人直升機自主著艦的研究較多存在于理論研究中,工程應用較少,與國外存在很大差距,因此,更加成熟的艦載無人直升機自主著艦方法研究已經提上日程。
1 現 狀
近年來,隨著艦載無人直升機的迅速發展,相應的自主著艦技術也逐漸展開,無人直升機自主著艦系統復雜、涉及學科范圍廣、技術難度高,在全球范圍內僅少數國家實現了無人直升機自主著艦[2]。典型的案例有法國SADA系統引導S100無人直升機在5級海況下于“蒙特卡姆”號驅逐艦上成功著艦(見圖1);美國的火力偵察兵于2006年實現了自主著艦;奧地利S100無人直升機采用差分GPS在許多國家艦船上實現自主著艦。目前國外自主著艦的引導方法主要分為衛星引導、雷達引導和光電引導3類[3]。其原理是利用不同的傳感器測量機艦相對位置,計算飛行控制所需的位姿參數,引導無人直升機順利著艦。而國內目前沒有無人直升機自主著艦的實例。
2 無人直升機自主著艦流程
2.1 總體流程
結合無人直升機自主著艦實際,可以將無人直升機自主著艦過程分為3個階段:1)無人直升機自主返航接近艦艇,直至位于艦艇附近一固定點并與艦艇同速同向飛行;2)無人直升機以水平側飛的方式飛行到降落平臺正上方;3)無人直升機相對于航行中的艦艇擇機垂直降落[4]。其著艦過程如圖2所示。
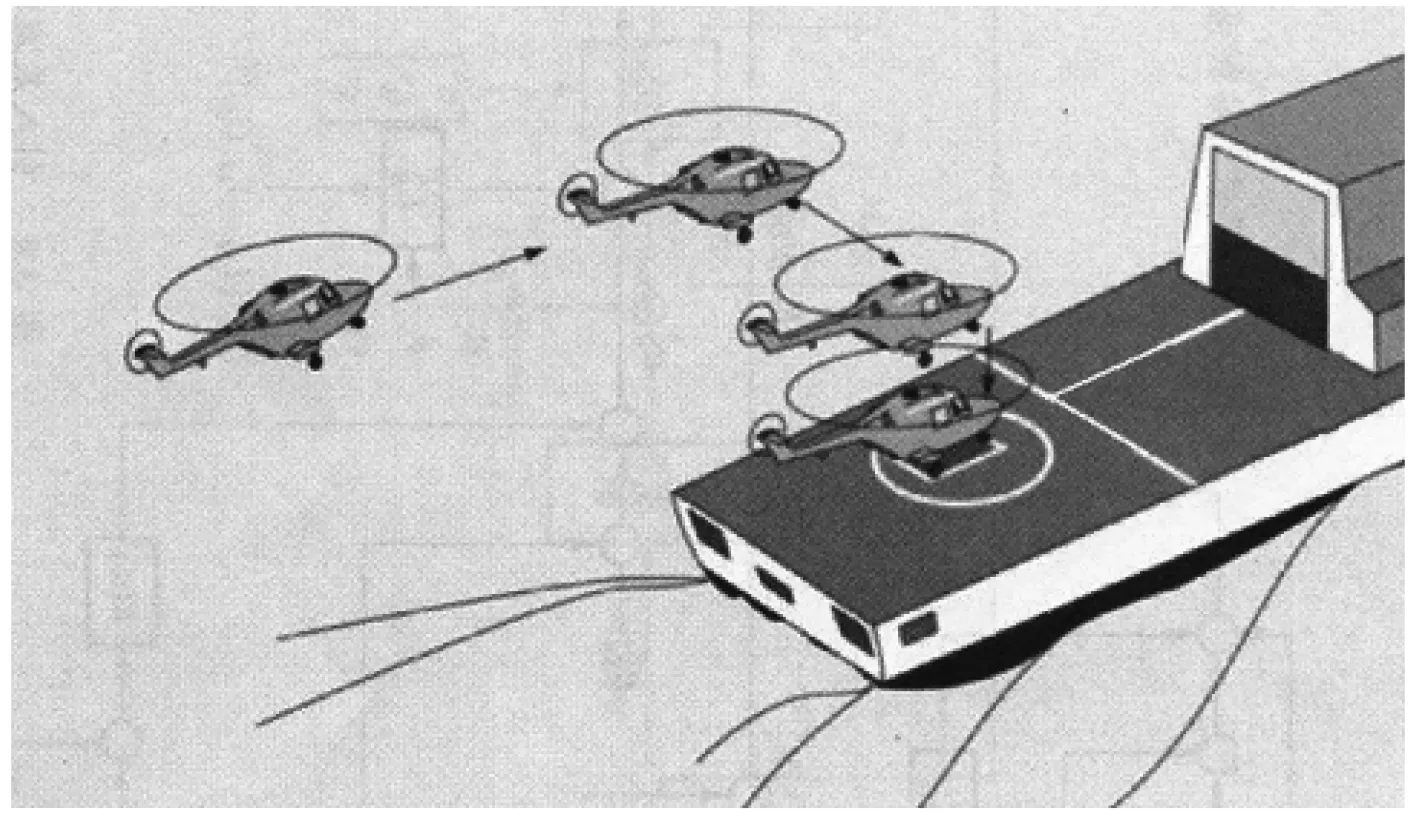
圖 2 無人直升機著艦過程Fig. 2 The process of unmanned helicopter autonomous landing
無人直升機著艦過程中著艦系統總體工作流程如圖3所示。
2.2 各階段工作流程
在著艦第一階段,采用差分GPS引導無人直升機飛行,直至進場點,系統工作流程圖如圖4所示。
在引導無人直升機返航后,無人直升機聯合多傳感器對著艦環境進行感知,然后在著艦過程中根據環境特征信息對無人直升機進行相對位姿估計,并根據位姿信息控制無人直升機飛行,著艦第2和第3階段系統工作流程如圖5所示。

圖 3 無人直升機自主著艦工作流程Fig. 3 The working process of unmanned helicopter autonomous landing
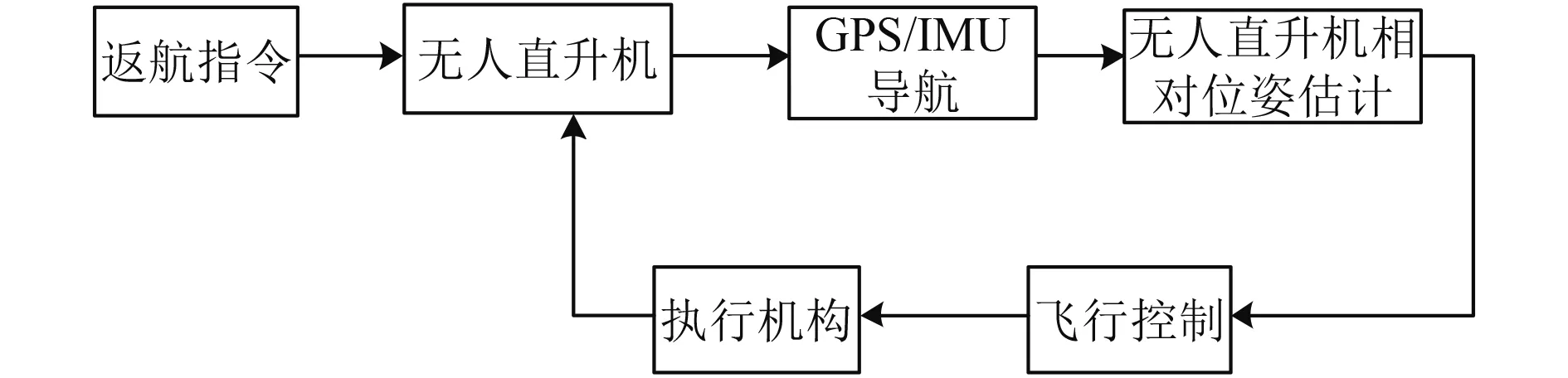
圖 4 著艦第一階段系統工作流程圖Fig. 4 Flow chart of the first stage of landing system
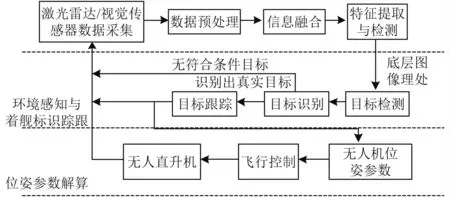
圖 5 著艦第2和第3階段系統工作流程圖Fig. 5 Flow chart of the second and third stages of landing system
3 系統模塊組成
根據無人直升機自主著艦流程,可以將無人直升機自主著艦系統設計成幾個模塊(見圖6),包括差分GPS引導模塊、環境感知模塊、位姿估計模塊和著艦控制模塊。
3.1 差分GPS引導模塊
差分GPS是目前GPS測量中定位精度最高的定位方法,又叫相對定位。通過在降落艦船上安裝基站,無人直升機在返航過程中接收基站發送的改正數,并對GPS測量結果進行改正以獲得精密定位的結果。差分GPS引導模塊其實是聯合差分GPS和IMU(慣性測量單元)的引導模塊,通過差分GPS和IMU對無人直升機進行位置和姿態估計,并將位姿信息傳遞給控制系統控制無人直升機飛行,圖7為基本差分GPS系統組成。
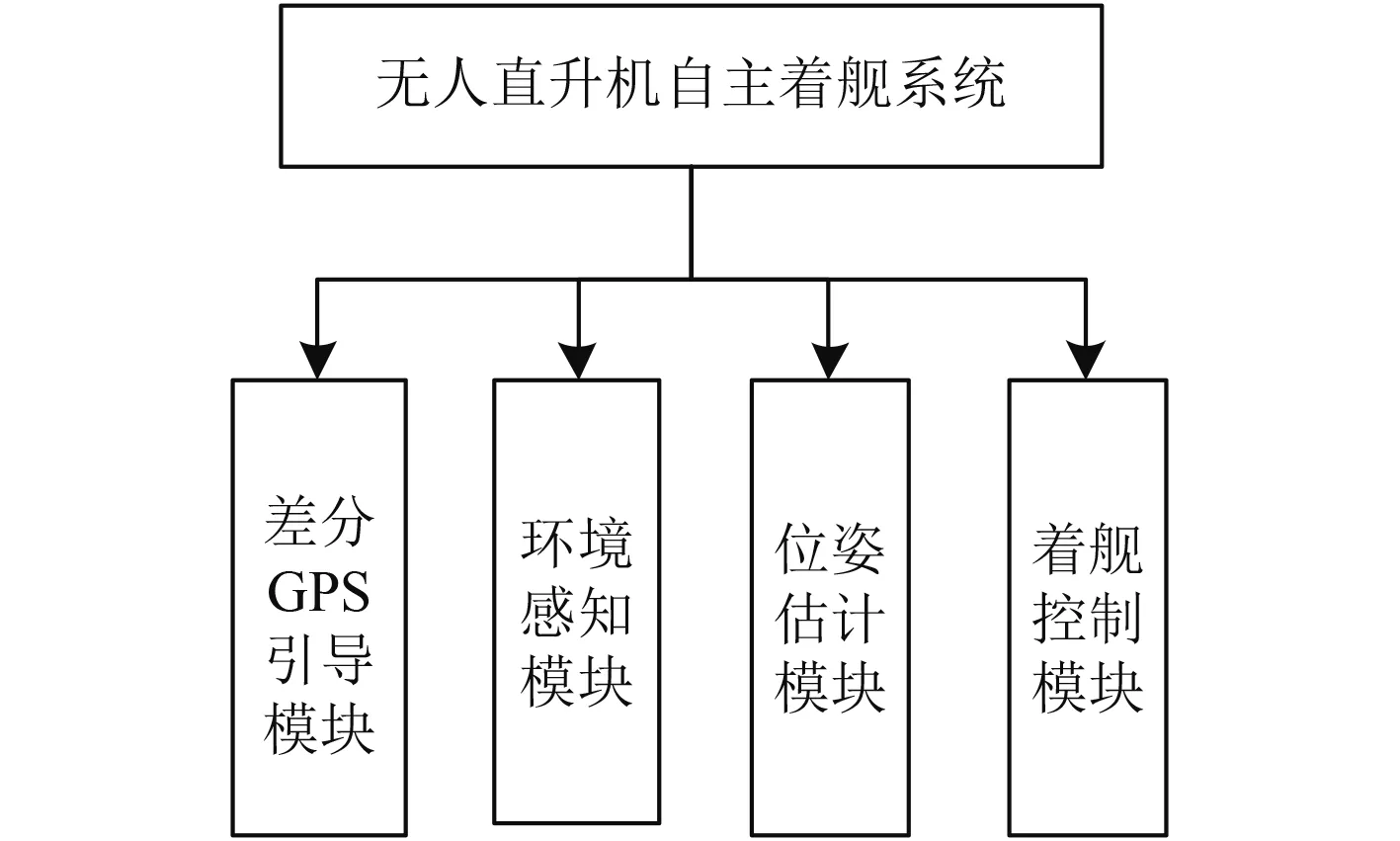
圖 6 自主著艦系統組成Fig. 6 Composition of the autonomous ship system
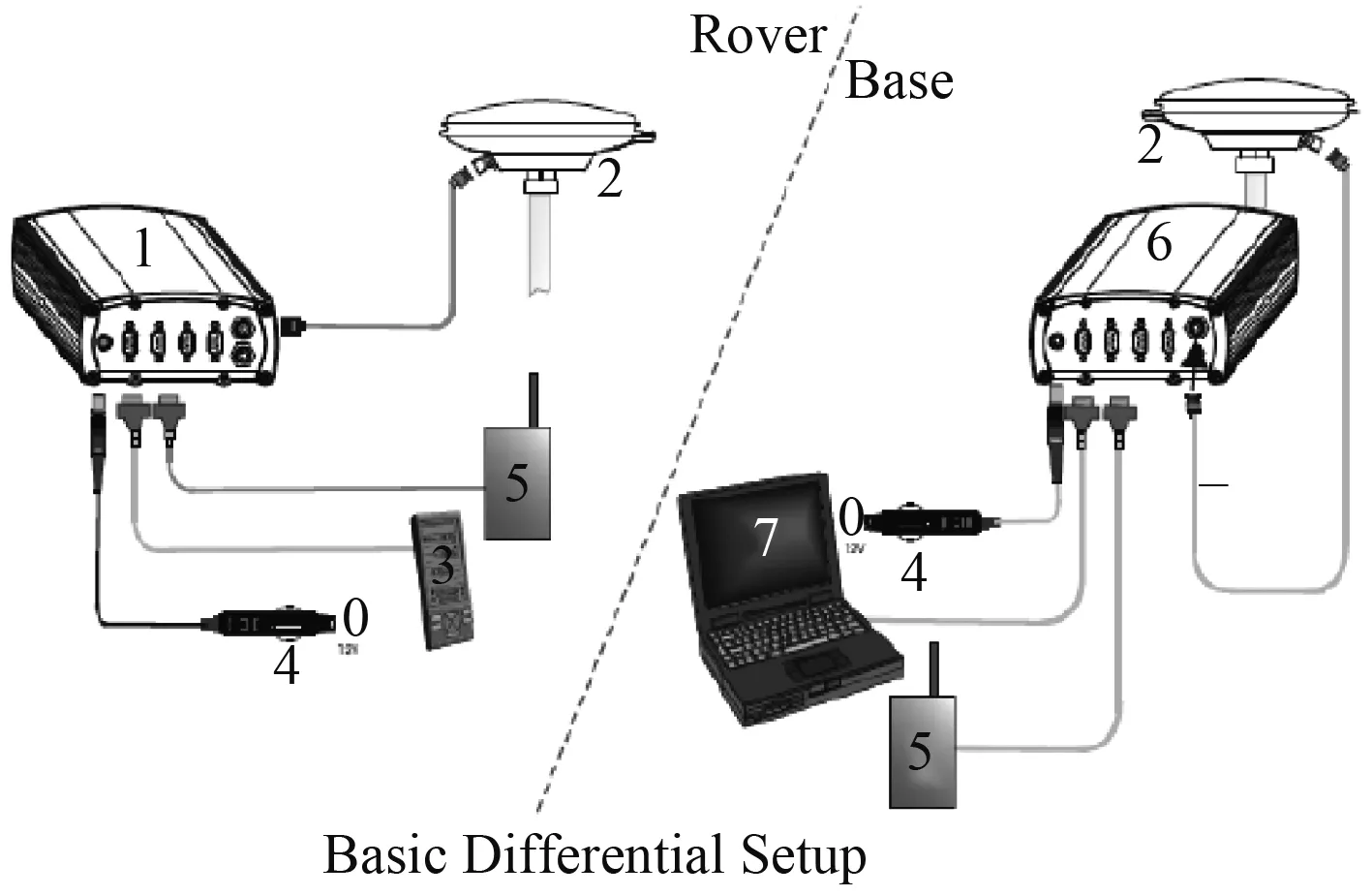
圖 7 基本差分GPS系統Fig. 7 Basic differential GPS system
3.2 環境感知模塊
環境感知模塊將多個環境感知傳感器集成到一起,包括激光雷達和視覺傳感器等。它的作用是融合多傳感器信息對艦艇環境進行感知,識別出著艦環境中的障礙物和著艦標志等環境信息,在環境信息中提取出可利用的特征信息對無人直升機進行導航[5]。聯合多傳感器可以提高環境感知速度和準確度,進而提高位姿估計精度。將多傳感器進行集成可以減小傳感器的重量和體積,以減輕無人直升機的負載。
3.3 位姿估計模塊
位姿估計模塊是根據傳感器信息對無人直升機的位置和姿態進行解算,著艦第1階段的傳感器信息為差分GPS和IMU的量測信息,著艦第2和第3階段的傳感器信息為激光雷達、視覺和IMU的量測信息。無人直升機要真正實現自主著艦,必須在位姿估計模塊中嵌入SLAM算法框架。“同步定位與地圖構建(SLAM)”技術主要解決無人平臺的位姿估計問題與環境特征的定位問題,是實現無人系統真正自主的關鍵[6]。一個完整的無人平臺同步定位與地圖構建問題處理過程如圖8所示。
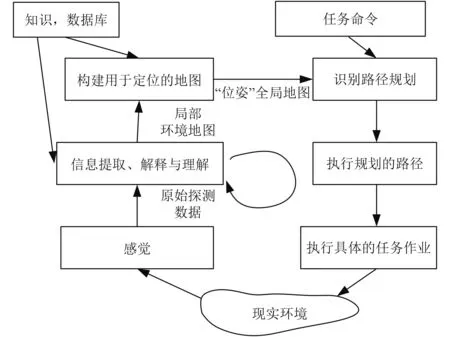
圖 8 SLAM處理流程Fig. 8 The SLAM process
3.4 著艦控制模塊
目前我國控制直升機著艦的方法大多為PID控制,這種方法設計過程透明,原理清晰明了,簡單實用,設計人員依靠豐富的設計經驗,使用多樣化的調參方法,可以設計出性能比較好的飛行控制系統。但是,無人直升機自主著艦對控制系統的精度和魯棒性要求很高,尤其在高海況條件時,經典PID方法難以滿足控制性能的要求。要實現無人直升機安全地自主著艦,則要求其在保證環境信息感知準確的前提下能夠結合自身運動狀態完成對飛行軌跡的合理控制,考慮在控制模塊中加入甲板預估器[7]。通過甲板運動預估器確定最佳的下降時間,然后控制無人直升機速率使之以最佳狀態著艦。
4 關鍵技術
在無人直升機自主著艦3個階段中,基于差分GPS的引導返航技術目前已經成熟,能夠在開闊的環境下引導無人直升機實現較高精度的導航,后2個階段中由于著艦環境時刻處于運動之中,且存在較為復雜的動態影響因素,因此面臨較大的困難與挑戰,目前還極少有成熟的處理方案,其中涉及的關鍵技術包括多傳感器的數據融合技術、著艦環境的感知方法、無人直升機的相對位姿估計方法和著艦控制技術。
4.1 多傳感器的數據融合技術
IMU、GPS、視覺和激光雷達等傳感器,由于在無人直升機上的安裝位置不同、探測原理差異等原因,獲取的原始數據處于不同的相對參考系下,且數據的采樣頻率不一,因此需要進行數據的時空對準預處理。在對環境進行探測感知的過程中,核心傳感器是視覺傳感器,考慮處理器運算能力以及通信帶寬,目前圖像傳感器的處理頻率最高約10 Hz,GPS信號的采樣與處理頻率可以達到100 Hz,而IMU的采樣處理能夠達到更高水平。以視覺傳感器獲取圖像信息的時間為基準,對最鄰近時刻的GPS信號和IMU信號進行數據內插和外推,實現數據的時間對準。同時,以視覺傳感器在艦載無人直升機平臺上的安裝位置為機體坐標系原點,將GPS設備與IMU設備獲取的信息經特定的位移與角度變換,轉換到統一的機體坐標系下[8]。
在著艦過程中要感知艦船環境,自主避開各種障礙物,構建聯通區域。激光雷達和視覺傳感器信息融合在一起,既能夠提供周圍環境的三維幾何信息,又能夠體現環境的顏色信息,還可以利用視覺傳感器垂直視野大的優點來彌補激光雷達掃描線少的缺陷。通過建立激光雷達與視覺傳感器多層融合算法框架,對激光雷達與單目視覺和雙目立體視覺進行多層融合,可以提供周圍環境的更加完善的描述,提高障礙檢測的能力[9]。另外,自主著艦系統以先驗模型識別出著艦標識后要對著艦標識進行跟蹤,目前較為先進的基于視覺的目標跟蹤算法融合了檢測模塊和跟蹤模塊,兩者并行進行,但此類算法得到的目標在圖像坐標系中存在一定位置偏差,并且逆透視到無人直升機坐標系時還存在一定標定誤差,所以在視覺算法基礎上融合激光雷達數據,可以有效提高定位精度[10]。
4.2 基于深度學習的著艦環境感知方法
在無人直升機自主返航后要對著艦環境進行感知,但由于海上環境復雜,直升機和艦艇的姿態處于動態變化之中,環境感知傳感器探測到的著艦標志、護欄等環境信息也會隨之變化,也有可能會出現環境特征被部分遮擋的情況,因此著艦環境感知比較困難。目前已有的目標識別方法,多數只能根據邊緣和幾何特征對著艦標志等環境信息進行粗略識別,一旦出現圖像角度偏差過大或者部分遮擋的情況,識別準確率大大下降。因此,可以采用深度學習的方法,利用其特征學習能力解決對著艦環境進行準確感知的問題。首先利用大量有標簽的訓練樣本進行目標特征的學習,然后通過無標簽樣本做測試,從而判斷目標識別的效果[11]。該方法的具體流程如圖9所示。
4.3 基于SLAM的相對位姿估計方法
SLAM問題本質上是狀態估計問題,即通過機器人運動學和傳感器信息對機器人位姿和地圖特征進行估計。在無人直升機自主著艦過程中,基于GPS信息、慣性測量單元以及直升機搭載的視覺傳感器和激光雷達,在對各個傳感器數據進行時空配準預處理之后,即可構建位姿估計的狀態模型與量測模型,借助非線性濾波方法,實現無人直升機的位姿估計[12]。融合多傳感器信息的無人直升機位姿估計算法流程如圖10所示。
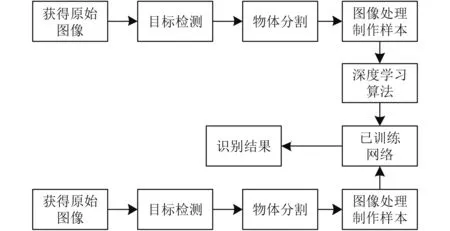
圖 9 目標識別流程圖Fig. 9 Target recognition flow chart
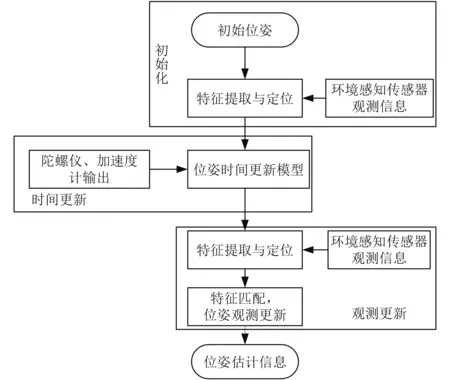
圖 10 融合多傳感器信息的無人直升機位姿估計算法流程Fig. 10 Estimation algorithm flow of unmanned helicopter with multi-sensor information
基于初始時刻的無人直升機位姿,采用環境感知傳感器對環境進行探測,根據環境感知傳感器的輸出進行環境特征的提取,基于環境感知傳感器的設備參數與探測特點,將環境特征描述為相對于導航坐標系的位置信息,然后無人直升機移動到下一采樣時刻,根據慣性傳感器對無人直升機位姿狀態進行時間更新,再次根據環境感知傳感器的輸出提取環境特征,并與前一時刻的環境特征進行匹配,根據匹配信息得到在一個采樣間隔里無人直升機位姿的變化量,以此變化量為觀測值,對位姿狀態進行量測更新,從而得到準確的位姿狀態的估計值,重點解決以下2個方面問題[13]:
1)無人直升機搭載的處理器的處理能力通常有限,且平臺的存儲能力、通信帶寬以及續航能力同樣有限,綜合考慮無人平臺執行具體任務時的各種要求,需要在保證或者調高位姿估計精度的前提下,降低位姿估計的運算量。
2)姿態估計問題屬于典型的非線性系統估計問題,為達到更好的估計效果,往往需要融合多個傳感器信息,通過高斯假設的矩近似濾波算法如擴展卡爾曼濾波、無跡卡爾曼濾波、容積卡爾曼濾波等進行處理,這些方法實質上均是基于聯合高斯分布假設的線性估計器。但隨著傳感器精度提高以及實際中系統狀態的初始不確定性等因素,由于初始誤差和/或精確測量條件下聯合高斯分布假設的準確性下降,使得后驗誤差矩陣出現過估計,即濾波器給出的誤差遠低于實際誤差,導致濾波發散。
4.4 基于甲板運動預估的著艦控制方法
由于風浪的影響,無人直升機著艦時要考慮艦艇甲板運動、陣風干擾、艦尾氣流和地面效應的影響,因此無人直升機自主著艦第三階段的控制要比進場階段困難的多。要實現無人直升機安全地自主著艦,則要求其在保證環境信息感知準確的前提下能夠結合自身運動狀態完成對飛行軌跡的合理控制。首先根據傳感器的量測和甲板運動的主要特性設計甲板運動預估器,然后通過預估器確定最佳的下降時間,并通過控制下降速率使無人直升機以最佳著艦狀態著艦,亦即按甲板運動預測的最小狀態著艦。這里要解決的難點問題是,普通的甲板運動預估器都是短時間的預估,時間過長會使預估器的誤差變大,而無人直升機著艦是相對緩慢的過程,從開始下降到觸艦時間較長,因此要改進現有甲板預估器,使之滿足著艦條件[14]。另外,設計著艦中止控制系統,當著艦危險因子較高時無人直升機選擇復飛。
5 結 語
在無人直升機自主著艦迫切的軍事需求背景下,以無人直升機自主著艦為研究對象,針對國內研究的不足,設計一套無人直升機自主著艦方案,分析自主著艦流程,闡述系統組成,研究關鍵技術。鑒于國內還沒有成熟的無人直升機自主著艦方法,本方案的研究具有重要現實意義,為實現無人直升機真正自主著艦提供了方向,為進一步工程實踐提供理論和技術支撐。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32