泰蓄2號機組抽水工況電氣事故跳機分析處理
2019-03-29 02:45:58肖仁軍李新煜
水電站機電技術 2019年3期
夏 鑫,肖仁軍,李新煜
(山東泰山抽水蓄能電站有限責任公司,山東 泰安271000)
1 事故現象
2016 年 05月 07日 00:30:00,泰山抽水蓄能電站2號機組抽水工況運行,00:52:53監控系統出現報警信息“GOV WATCHDOG ALARM COMING(調速器看門狗報警出現)”,00:52:54此報警消失,同時出現“ELECTRIC TRIP RELAIS ACTIVE COMING(電氣跳機繼電器動作)”,2號機組電氣事故跳機,2號機發電機出口開關、勵磁直流開關跳開,導葉、球閥緊急關閉。
2 事故原因分析
2號機電氣事故跳機前出現的“GOV WATCHDOG ALARM COMING”報警信息為判斷監控系統CPU與調速器控制系統CPU通信是否正常的一個信號,如圖1所示,當機組停機穩態時GOV WATCHGOD監視時間為10s,當機組非停機穩態時GOV WATCHGOD監視時間為5s,也就是說當機組開機時監控系統與調速器控制系統通信異常超過5s,監控系統就會報出“GOV WATCHDOG ALARM COMING”,此報警并非判斷調速器控制系統CPU死機的硬件看門狗信號,因此不會導致跳機。
正常運行時機組轉速信號為監控與調速器的通信轉速信號,而當監控與調速器通信異常時,即“GOV WATCHDOG ALARM COMING”報警時,機組轉速信號切換為硬布線輸入至監控系統信號PIW592。
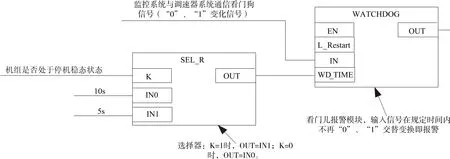
圖1 GOV WATCHDOG監視時間選擇
通過查看監控系統硬件組態可以發現模擬量輸入通道PIW592接受信號為4線制4~20mA電流信號,而調速器控制系統輸出至監控系統的硬布線轉速信號是通過調速器控制系統PLC模擬量輸出通道Q400輸出0~10V至T01信號隔離轉換模塊,T01將0~10V輸入信號轉換為4~20mA電流信號至監控系統PIW592,對應轉速為0~200%(圖2)。

圖2 硬布線轉速模擬量信號轉化過程
現場檢查發現T01模塊無論輸入信號0~10V怎樣變化,輸出均為4mA,對應轉速為0。而監控程序中換相刀閘在抽水位置、發電機出口開關合閘、機組轉速小于95%時將觸發Q4.1開關量輸出點動作(圖3),Q4.1輸出勵磁-K033繼電器,-K033繼電器13、14輔助觸點閉合勵磁-K86U1和K86U2電氣跳閘繼電器,引起機組電氣事故跳機(圖4)。
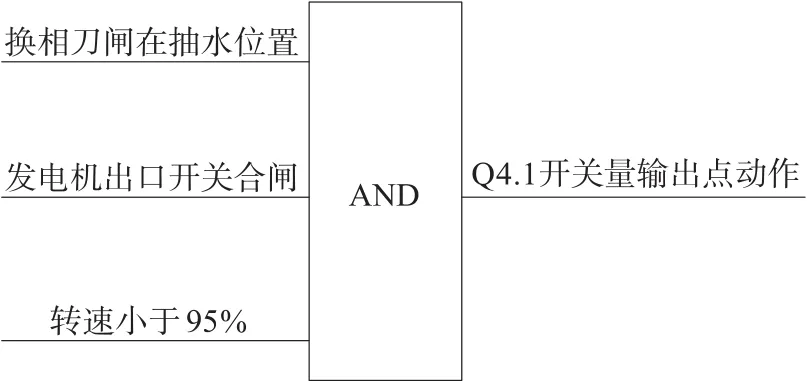
圖3 Q4.1開關量輸出點動作邏輯

圖4 電氣事故跳機硬接線邏輯圖
3 事故處理
(1)2號機組跳閘后,對機組轉動部件、蝸殼以及發電機出口開關進行檢查和試驗均無異常,沒有出現設備損壞。
(2)更換調速器信號轉換模塊T01,徹底消除此次2號機組跳閘的直接原因。這樣,即使監控系統與2號機調速器控制系統通信存在問題、出現通信看門狗報警時,也不會因機組轉速信號切換為硬布線輸入而導致機組電氣事故跳機。
(3)為消除監控系統與2號機調速器控制系統通信看門狗報警問題,進行如下2項工作:
1)檢查監控系統與調速器系統通信網線,發現連接網絡端口存在不閃爍現象,側面反映可能存在通信中斷現象。將監控與調速器通信網線更換為超6類西門子設備專用網線。
2)為協調、優化監控系統與調速器系統通信看門狗監視功能,將監控系統程序中判斷監控系統與2號機調速器控制系統通信功能是否正常看門狗報警的運算塊由組織功能塊OB38(掃描時間50ms)改至組織功能塊OB35中。
上述應對措施從硬件以及程序兩個方面進行了有益的探索和實施,從現場觀察來看取得一定的效果,經過一段時間的跟蹤觀察,通信正常,未再出現此類報警。
4 暴露的問題
(1)日常運檢工作中,沒有采用有效手段或試驗項目及時發現損壞的2號機調速器信號轉換模塊T01,導致當監控與調速器通信異常時,即“GOV WATCHDOG ALARM COMING”報警時,2號機調速器控制系統送往監控的機組轉速信號由通信信號切換為硬布線信號時,轉速信號采集錯誤,觸發機組電氣跳閘邏輯。
(2)監控系統跳閘邏輯設置不合理。監控系統程序中,當換相刀閘在抽水位置、發電機出口開關合閘、機組轉速小于95%時電氣事故跳機邏輯已經在保護系統中低頻切泵保護功能中進行配置,不應在監控程序中再次設置相關保護跳閘邏輯。
(3)監控系統存在CPU掃描周期偏長現象(最短掃描時間為125ms,最長掃描時間為1094ms),加上已連續運行10年,一定程度上干擾了缺陷分析。下一步結合檢修進行程序優化、硬件更換升級等手段消除該問題。
5 改進措施
(1)在日常檢修項目中,將調速器控制系統與監控系統之間通信故障切換功能試驗列入檢修試驗項目,便于及時發現損壞的調速器控制系統信號轉換模塊。
(2)將監控系統與調速器控制系統通信情況檢查納入定期工作,及時發現設備缺陷。
(3)結合電氣二次專業優化提升工作,梳理監控系統邏輯,優化監控系統及其他電氣二次系統的保護跳閘功能。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25