行星傳動(dòng)動(dòng)態(tài)嚙合有限元仿真分析
2019-03-28 09:10:04
制造業(yè)自動(dòng)化 2019年3期
關(guān)鍵詞:分析
(西安科技大學(xué) 機(jī)械工程學(xué)院,西安 710054)
0 引言
行星輪系工作可靠,傳動(dòng)效率高,適用范圍廣,要保持平穩(wěn)的齒輪嚙合傳動(dòng)過程,有必要對齒輪進(jìn)行強(qiáng)度分析。嚙合是一種典型的接觸問題。在若干假設(shè)前提下,傳統(tǒng)的齒輪的接觸強(qiáng)度計(jì)算不能準(zhǔn)確反映嚙合過程中的應(yīng)力以及應(yīng)變分布與變化。而齒輪在實(shí)際傳動(dòng)過程中兩齒面的接觸區(qū)域是不斷發(fā)生變化的,采用有限元分析方法則可以準(zhǔn)確、快速計(jì)算,直觀方便的查看計(jì)算的接觸應(yīng)力分布等優(yōu)點(diǎn)。
本文運(yùn)用ABAQUS軟件,基于經(jīng)典赫茲接觸理論,分別采用準(zhǔn)靜態(tài)分析方法與顯示動(dòng)力分析模擬行星齒輪傳動(dòng)中輪齒嚙合情況,研究輪齒接觸應(yīng)力與齒根應(yīng)力分布規(guī)律,對比兩種方法與理論分析,可以為行星輪系設(shè)計(jì)提供更為可靠的設(shè)計(jì)保證。
1 傳統(tǒng)理論應(yīng)力分析
齒輪的失效形式主要是齒面損傷和輪齒折斷。工作時(shí),各個(gè)輪齒表面接觸應(yīng)力是按脈動(dòng)循環(huán)變化的,若齒面最大接觸應(yīng)力大于材料的接觸應(yīng)力極限,則在多次重復(fù)載荷作用下,齒輪表面會(huì)逐漸產(chǎn)生細(xì)小的裂紋,裂紋慢慢擴(kuò)展,甚至?xí)纬善邳c(diǎn)蝕,對傳動(dòng)的穩(wěn)定性有很大的影響,伴隨著產(chǎn)生振動(dòng)和噪聲,影響齒輪的正常工作,甚至?xí)瘕X輪的破壞。另外,在行星齒輪傳動(dòng)中,當(dāng)輪齒受到載荷的反復(fù)作用,齒根彎曲應(yīng)力大于材料的彎曲應(yīng)力極限時(shí),齒根部分將產(chǎn)生疲勞裂紋,隨著裂紋不斷擴(kuò)展,最終輪齒產(chǎn)生疲勞折斷。基于這兩種失效形式,故對齒輪的接觸強(qiáng)度與齒根彎曲疲勞強(qiáng)度進(jìn)行強(qiáng)度校核。
1.1 齒輪接觸應(yīng)力計(jì)算
兩物體相互接觸時(shí),在接觸區(qū)域附近會(huì)產(chǎn)生局部應(yīng)力和局部變形,稱為接觸應(yīng)力和接觸變形,本文采用經(jīng)典赫茲接觸理論來進(jìn)行齒輪的接觸應(yīng)力的計(jì)算,齒輪嚙合時(shí),可將齒廓嚙合點(diǎn)的曲率半徑視為接觸圓柱體的半徑,齒輪節(jié)點(diǎn)處一般只有一對齒嚙合,節(jié)線附近的齒根表面往往先出現(xiàn)點(diǎn)蝕。因此接觸疲勞強(qiáng)度計(jì)算通常以節(jié)點(diǎn)為計(jì)算點(diǎn),可得接觸應(yīng)力公式:

其中由機(jī)械手冊中可查出:
K為載荷系數(shù);
ZE為彈性系數(shù);
ZH為節(jié)點(diǎn)區(qū)域系數(shù);
Zε為重合度系數(shù);
d1為小齒輪的分度圓直徑;
u為大小齒輪齒數(shù)之比;
T1為主動(dòng)輪的扭矩。
許用接觸應(yīng)力:

式中:σHlim為失效概率為1%時(shí),試驗(yàn)齒輪的接觸疲勞極限;
SHmin為接觸強(qiáng)度的最小安全系數(shù);
ZN為接觸疲勞強(qiáng)度極限,均可由機(jī)械設(shè)計(jì)手冊查出。
1.2 齒根彎曲疲勞強(qiáng)度計(jì)算
由于輪緣剛度很大,故將輪齒視為是具有一定寬度的懸臂梁。理論上載荷應(yīng)由同時(shí)嚙合的多對齒分擔(dān),為簡化計(jì)算,通常假設(shè)載荷只作用于只有一對齒嚙合時(shí)的齒頂進(jìn)行分析,并采用重合度系數(shù)予以修正。在載荷長期作用下,輪齒齒根受拉一側(cè)先產(chǎn)生疲勞裂紋,故齒根彎曲疲勞強(qiáng)度以受拉側(cè)為計(jì)算依據(jù)。齒根彎曲強(qiáng)度校核公式:

單向受載時(shí),許用彎曲應(yīng)力公式:

將中心輪、行星輪、內(nèi)齒輪的各個(gè)相應(yīng)參數(shù)代入式(1)~式(4)計(jì)算可得各齒輪的接觸應(yīng)力和彎曲應(yīng)力。
2 有限元分析模型構(gòu)建
太陽輪與行星齒輪的接觸和行星齒輪與內(nèi)齒輪的接觸都存在相對運(yùn)動(dòng)的摩擦力,由于摩擦力相對正壓力很小,所以在分析過程中設(shè)定摩擦系數(shù)。在有限元分析中,接觸過程通常依賴于時(shí)間,且在接觸界面上運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)的狀態(tài)是事前未知的。本文主要是利用ABAQUS對行星齒輪傳動(dòng)機(jī)構(gòu)進(jìn)行齒輪嚙合的接觸分析,查看傳動(dòng)過程中齒面接觸應(yīng)力。
2.1 Abaqus有限元分析前處理
齒輪有限元分析屬于結(jié)構(gòu)分析,初始狀態(tài)下模型的響應(yīng)由線彈性模型確定,材料定義為各向同性,并通過輸入彈性模量、泊松比、和質(zhì)量密度三個(gè)物理量來完成材料屬性定義。本文中心輪和行星輪均采用20CrMnTi,齒面硬度58~62HRC,滲碳淬火,加工精度6級(jí)。內(nèi)齒圈均采用42CrMo,加工精度7級(jí)。材料屬性如表1所示。

表1 材料屬性表
網(wǎng)格劃分是否合理影響分析結(jié)果精度,網(wǎng)格過疏結(jié)果誤差較大,網(wǎng)格過密計(jì)算機(jī)工作量較大耗時(shí)長。由于行星輪結(jié)構(gòu)較為復(fù)雜,本文簡化模型分析單齒的嚙合,在劃分網(wǎng)格時(shí)采用結(jié)構(gòu)化網(wǎng)格和局部網(wǎng)格細(xì)化技術(shù),在接觸面附近設(shè)置較密種子,既減少網(wǎng)格數(shù)量又減小了分析誤差劃分。網(wǎng)格單元類型為C3D8R,單元個(gè)數(shù)為,網(wǎng)格劃分模型如下圖所示。
根據(jù)行星輪傳動(dòng)機(jī)構(gòu)的實(shí)際工況進(jìn)行邊界條件設(shè)置,約束內(nèi)齒輪所有自由度,釋放太陽輪繞軸線的旋轉(zhuǎn)自由度,約束其他自由度,行星輪既可以繞其軸線旋轉(zhuǎn),又可以繞太陽輪旋轉(zhuǎn),因此釋放切向位移和周向旋轉(zhuǎn)位移。
2.2 準(zhǔn)靜態(tài)接觸分析
ABAQUS/Standard采用Newton-Raphson算法求解非線性問題的,把分析過程劃分為一系列的載荷增量步,在每個(gè)增量步內(nèi)進(jìn)行多次迭代,得到合理的解釋后再求解下一個(gè)增量步,所有增量響應(yīng)的總和就是非線性分析的近似解。
在齒輪接觸分析前處理過程中,建立在接觸關(guān)系初期直接施加力載荷,往往會(huì)導(dǎo)致分析計(jì)算不收斂,因此通過設(shè)置多個(gè)非線性靜態(tài)通用步模擬行星輪系的動(dòng)態(tài)分析,首先使用位移邊界條件建立平穩(wěn)接觸,然后施加力載荷。
準(zhǔn)靜態(tài)模擬齒輪嚙合傳動(dòng)仿真分析結(jié)果如下圖所示,從分析云圖中可以清楚地看到齒輪入嚙到脫嚙時(shí)接觸應(yīng)力大小位置與變化情況。隨著齒輪副的進(jìn)一步嚙合,齒輪副在嚙合點(diǎn)和齒根位置的應(yīng)力較大,且太陽輪和行星輪嚙合部分的齒面接觸應(yīng)力最大值為420.7 MPa,行星輪和內(nèi)齒輪嚙合部分的齒面接觸應(yīng)力最大為373.4MPa,應(yīng)力云圖如圖1、圖2所示。

圖1 內(nèi)齒圈和行星輪嚙合齒面接觸應(yīng)力

圖2 太陽輪和行星輪嚙合齒面接觸應(yīng)力
由于篇幅限制,在此僅列出0.14s、0.43s、0.71s 、1.00s時(shí)刻行星輪傳動(dòng)動(dòng)態(tài)嚙合情況,如圖3~圖6所示,由嚙合云圖可以看出,隨著進(jìn)一步嚙入,太陽輪與行星輪齒面接觸應(yīng)力大于行星輪與內(nèi)齒圈,且接觸應(yīng)力在輪齒接觸點(diǎn)處最大,并向齒根擴(kuò)散。

圖3 0.14s嚙合云圖

圖4 0.43s嚙合云圖

圖5 0.71s嚙合云圖

圖6 1.00s嚙合云圖
在ABAQUS中采用S-Max,Principle模塊可以得到各齒輪的齒根彎曲應(yīng)力大小及分布云圖,其中內(nèi)齒圈、行星輪、太陽輪的齒根彎曲應(yīng)力云圖如圖7~圖9所示。

圖7 內(nèi)齒圈齒根彎曲應(yīng)力云圖

圖8 太陽輪齒根彎曲應(yīng)力云圖
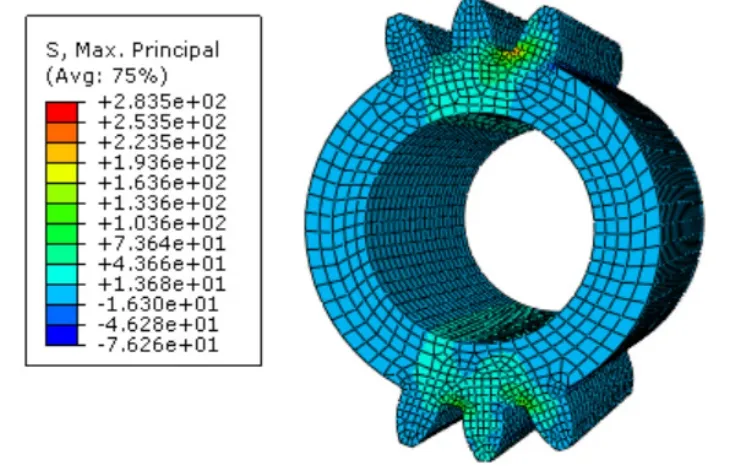
圖9 行星輪齒根彎曲應(yīng)力云圖
從以上應(yīng)力云圖可以看出,內(nèi)齒圈齒根彎曲應(yīng)力244.9MPa,太陽輪齒根彎曲應(yīng)力301.6MPa,行星輪齒根彎曲應(yīng)力283.5MPa。均滿足強(qiáng)度要求。
2.3 顯示動(dòng)力學(xué)分析
ABAQUS/Explicit在求解非線性問題時(shí)不需要進(jìn)行迭代,而是顯示地從上一個(gè)增量步的靜力學(xué)狀態(tài)來推算出動(dòng)力學(xué)平衡方程的解。顯示動(dòng)力分析的求解過程需要大量的增量步,但由于不進(jìn)行迭代,不需要求解全體方程組,并且每個(gè)增量步的計(jì)算成本很小,可以高效地解決復(fù)雜的非線性問題。
在進(jìn)行齒輪模型接觸分析時(shí),ABAQUS會(huì)自動(dòng)創(chuàng)建一個(gè)初始分析步來定義初始狀態(tài)下的邊界條件和相互作用,為使齒輪穩(wěn)定接觸,并能夠仿真太陽輪的嚙入和嚙出過程,本文創(chuàng)建兩個(gè)動(dòng)態(tài)顯式分析步,第一個(gè)分析步設(shè)為0.005s,第二個(gè)分析步設(shè)為0.06s,Nlgoem選擇ON。為加速分析,降低計(jì)算成本,質(zhì)量放大系數(shù)為10。質(zhì)量放大倍數(shù)越大,計(jì)算速度越快,但同時(shí)也會(huì)使齒輪慣性增大,計(jì)算結(jié)果不夠精確。本分析中應(yīng)力云圖如下所示,其中太陽輪和行星輪嚙合部分的齒面接觸應(yīng)力最大值為473.8MPa,行星輪和內(nèi)齒輪嚙合部分的齒面接觸應(yīng)力最大為511.9MPa。

圖10 內(nèi)齒圈和行星輪嚙合齒面接觸應(yīng)力
本分析同樣列出0.14s、0.43s、0.71s、1.00s時(shí)刻行星輪傳動(dòng)動(dòng)態(tài)嚙合情況,如圖3~圖6所示,由嚙合云圖可以看出,在顯示動(dòng)力學(xué)分析下的輪齒嚙合過程中,接觸應(yīng)力依舊在輪齒接觸點(diǎn)處最大,并向齒根擴(kuò)散。其中太陽輪與行星輪嚙合處、行星輪與內(nèi)齒圈嚙合處均出現(xiàn)最大應(yīng)力點(diǎn)。

圖11 太陽輪和行星輪嚙合齒面接觸應(yīng)力

圖12 0.14s嚙合云圖

圖13 0.43s嚙合云圖

圖14 0.71s嚙合云圖
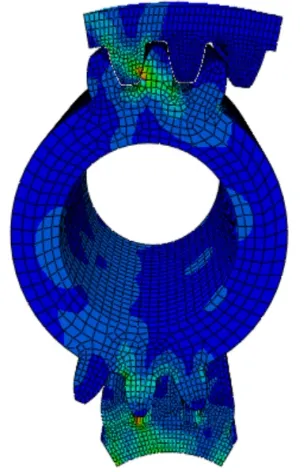
圖15 1.00s嚙合云圖
采用S-Max,Principle模塊得到各齒輪的齒根彎曲應(yīng)力大小及分布云圖,其中內(nèi)齒圈、行星輪、太陽輪的齒根彎曲應(yīng)力云圖如圖7~圖9所示。

圖16 內(nèi)齒圈齒根彎曲應(yīng)力云圖

圖17 行星輪齒根彎曲應(yīng)力云圖

圖18 太陽輪齒根彎曲應(yīng)力云圖
從齒根彎曲應(yīng)力云圖可以看出,嚙合過程中內(nèi)齒圈齒根彎曲應(yīng)力286.8MPa,太陽輪齒根彎曲應(yīng)力338.7 MPa,行星輪齒根彎曲應(yīng)力265MPa。
2.4 兩種仿真分析對比
按照標(biāo)準(zhǔn)漸開線圓柱直齒輪的強(qiáng)度校核方法,所得各個(gè)齒輪接觸應(yīng)力與齒根應(yīng)力,仿真結(jié)果與理論值對比如表2所示。

表2 仿真結(jié)果與理論結(jié)果對比表
由上表對比可知,理論分析結(jié)果與兩種仿真結(jié)果存在一定誤差,這是由于理論分析時(shí)把接觸看作線接觸,而在分析軟件中,模型采取面接觸,較理論分析可進(jìn)一步提高計(jì)算準(zhǔn)確性。無論是采用準(zhǔn)靜態(tài)分析還是顯示動(dòng)力分析都可以求出了各個(gè)嚙合輪齒處于不同嚙合位置的接觸壓力、應(yīng)力的大小及其分布。動(dòng)態(tài)分析可以在一次求解過程中,計(jì)算不同嚙合位置處的應(yīng)力及其變化趨勢。但是動(dòng)態(tài)分析時(shí),齒輪嚙合狀態(tài)會(huì)不斷在單齒嚙合與雙齒嚙合交替變換,在嚙入嚙出時(shí)會(huì)存在嚙合沖擊,使得齒輪產(chǎn)生較大沖擊應(yīng)力。使用顯示動(dòng)態(tài)分析得到的輪齒應(yīng)力隨時(shí)間變化的仿真結(jié)果會(huì)更加接近實(shí)際齒輪嚙合過程。下圖所示分別為單齒嚙合時(shí),準(zhǔn)靜態(tài)分析過程與顯示動(dòng)力分析過程中太陽輪應(yīng)力沿齒根方向的變化云圖。

圖19 準(zhǔn)靜態(tài)分析過程太陽輪接觸應(yīng)力沿齒根方向的變化云圖
在上述云圖中,可以看出靜態(tài)分析在3.5處應(yīng)力達(dá)到最大值,在4.5附近又出現(xiàn)較大應(yīng)力處,而動(dòng)力分析中嚙合在4.5處出現(xiàn)應(yīng)力峰值,而齒輪在嚙合過程中,主動(dòng)齒的應(yīng)力由齒頂向齒根方向擴(kuò)散,在節(jié)圓處達(dá)到最大值。
3 結(jié)論
本文主要對比了兩種仿真分析方法對于行星傳動(dòng)動(dòng)態(tài)嚙合輪齒的應(yīng)力分布規(guī)律,探究了齒輪在不同嚙合位置時(shí)齒面的接觸應(yīng)力、齒根應(yīng)力的變化等,結(jié)論與理論分析基本吻合。
準(zhǔn)靜態(tài)通用分析能夠模擬行星輪系動(dòng)態(tài)分析,建立較為平穩(wěn)的接觸關(guān)系,在分析中計(jì)算稍許簡便。且仿真結(jié)果與理論值誤差較小。顯示動(dòng)力分析能夠高保真地模擬出齒輪實(shí)際嚙合過程,對于進(jìn)一步輪系的動(dòng)態(tài)特性研究有著深刻意義。而在實(shí)際生產(chǎn)生活中,結(jié)合兩種仿真方法與理論分析,則將對輪系的優(yōu)化以及系統(tǒng)可靠性研究提供重要保證。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
