人工智能在雷達(dá)應(yīng)用中的限制和發(fā)展前景
2019-03-26 02:28:32李波任紅梅肖志河
軍事文摘 2019年2期
李波 任紅梅 肖志河

人工智能是研究、開(kāi)發(fā)用于模擬、延伸和擴(kuò)展人的智能理論、方法、技術(shù)及應(yīng)用系統(tǒng)的一門(mén)科學(xué)。雷達(dá)目標(biāo)識(shí)別技術(shù)是人工智能在裝備領(lǐng)域的重要應(yīng)用,隨著人工智能技術(shù)的發(fā)展,雷達(dá)識(shí)別也在不斷進(jìn)步,從模式識(shí)別、機(jī)器學(xué)習(xí)到近年來(lái)發(fā)展迅猛的深度學(xué)習(xí)、遷移學(xué)習(xí)等在雷達(dá)識(shí)別中都有較多研究成果。
傳統(tǒng)雷達(dá)識(shí)別方法難以適應(yīng)復(fù)雜多變的戰(zhàn)場(chǎng)環(huán)境
現(xiàn)有雷達(dá)目標(biāo)識(shí)別常采用統(tǒng)計(jì)模式識(shí)別理論。模式識(shí)別是主要利用統(tǒng)計(jì)學(xué)、概率論、計(jì)算幾何、機(jī)器學(xué)習(xí)、信號(hào)處理以及算法的設(shè)計(jì)等工具從可感知的數(shù)據(jù)中進(jìn)行推理的一門(mén)學(xué)科,其中心任務(wù)是找出某類事物的本質(zhì)屬性。對(duì)于雷達(dá)目標(biāo)識(shí)別而言即首先根據(jù)雷達(dá)所跟蹤目標(biāo)的運(yùn)動(dòng)、回波等信息,提取目標(biāo)穩(wěn)定的且具有標(biāo)志性的特征,稱為“識(shí)別特征模板”,然后把待識(shí)別的模式劃分到各自模式類中。對(duì)于給定一個(gè)模式的識(shí)別/分類將面臨兩類任務(wù):監(jiān)督分類和無(wú)監(jiān)督分類,其中有監(jiān)督分類把模式劃分已有的類別中,而無(wú)監(jiān)督分類把模式劃分到未知的類別中。
現(xiàn)有雷達(dá)常用識(shí)別方法在下文中稱為“傳統(tǒng)雷達(dá)識(shí)別技術(shù)”。特征提取是傳統(tǒng)雷達(dá)識(shí)別技術(shù)重要環(huán)節(jié),雷達(dá)識(shí)別特征強(qiáng)烈依賴于用人的先驗(yàn)知識(shí)和專業(yè)技能,雷達(dá)目標(biāo)識(shí)別算法的設(shè)計(jì)需要較深的目標(biāo)特性、特征提取的研究背景。
傳統(tǒng)雷達(dá)目標(biāo)識(shí)別依據(jù)所采用的特征不同而分為窄帶RCS特征識(shí)別、高分辨距離像特征識(shí)別、ISAR特征識(shí)別和運(yùn)動(dòng)特征識(shí)別、微動(dòng)特征識(shí)別等技術(shù)途徑。
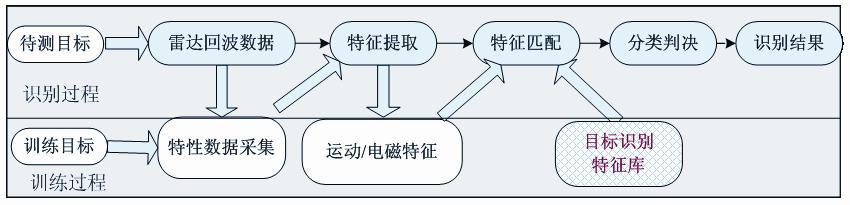
傳統(tǒng)雷達(dá)目標(biāo)識(shí)別通常是接收雷達(dá)傳感器固定信息進(jìn)行數(shù)字信號(hào)處理提取出待識(shí)別目標(biāo)的特征,利用已有的特征模板對(duì)提取的特征進(jìn)行分類,對(duì)照隸屬度對(duì)目標(biāo)進(jìn)行識(shí)別。傳統(tǒng)目標(biāo)識(shí)別存在的主要問(wèn)題是按照預(yù)先設(shè)定的識(shí)別模式工作,不具備隨目標(biāo)和環(huán)境變化而自動(dòng)改變識(shí)別模式的能力,當(dāng)環(huán)境發(fā)生變化時(shí),僅僅依靠被動(dòng)的特征提取、分類已難以獲得理想的效果,對(duì)目標(biāo)和環(huán)境的適應(yīng)能力不足。面對(duì)日益復(fù)雜的戰(zhàn)場(chǎng)環(huán)境及密集雜波、多目標(biāo)背景等挑戰(zhàn),為滿足當(dāng)前特別是未來(lái)作戰(zhàn)需求,識(shí)別技術(shù)必須進(jìn)一步創(chuàng)新發(fā)展以不斷提升識(shí)別模式、識(shí)別性能,才能適應(yīng)日益復(fù)雜的作戰(zhàn)環(huán)境。
深度學(xué)習(xí)識(shí)別對(duì)大樣本需求限制了在實(shí)時(shí)對(duì)抗中的應(yīng)用
傳統(tǒng)雷達(dá)目標(biāo)識(shí)別難點(diǎn)主要集中在對(duì)待識(shí)別目標(biāo)的差異性規(guī)律、識(shí)別機(jī)理等基礎(chǔ)問(wèn)題掌握不全面,解決識(shí)別問(wèn)題的前提是目標(biāo)特性的深入分析,是一個(gè)長(zhǎng)期的研究過(guò)程。但武器系統(tǒng)智能化發(fā)展速度迅猛,武器裝備的智能作戰(zhàn)能力提升對(duì)雷達(dá)識(shí)別技術(shù)提出了更高的要求,不可能等目標(biāo)特性機(jī)理完全清楚了,再去研究雷達(dá)識(shí)別技術(shù)。
隨著人工智能技術(shù)的迅速發(fā)展,基于深度學(xué)習(xí)、遷移學(xué)習(xí)等人工智能在軍事領(lǐng)域應(yīng)用技術(shù)也受到國(guó)內(nèi)外廣泛關(guān)注,許多專家、學(xué)者均提出了采用智能識(shí)別技術(shù)進(jìn)行目標(biāo)和環(huán)境特征提取和模式識(shí)別等任務(wù),實(shí)現(xiàn)雷達(dá)對(duì)非合作目標(biāo)的有效識(shí)別。美國(guó)國(guó)防部國(guó)防創(chuàng)新試驗(yàn)小組也明確指出人工智能關(guān)注重點(diǎn):能夠提供實(shí)時(shí)對(duì)抗服務(wù)。
目前,基于深度學(xué)習(xí)方法對(duì)不同形式雷達(dá)數(shù)據(jù)進(jìn)行處理,經(jīng)過(guò)調(diào)研發(fā)現(xiàn),針對(duì)不同雷達(dá)成像原理集信號(hào)處理方法,可以得到不同形式的雷達(dá)數(shù)據(jù)。如合成孔徑雷達(dá)圖像、高分辨距離像(HRRP)、微多普勒?qǐng)D譜以及距離多普勒?qǐng)D譜等。主流的研究思路主要基于生成各種不同雷達(dá)圖像,利用深度學(xué)習(xí)網(wǎng)絡(luò)對(duì)圖像進(jìn)行處理。

利用深度學(xué)習(xí)網(wǎng)絡(luò)對(duì)雷達(dá)數(shù)據(jù)處理的思路主要是在宏觀角度的闡述,深度學(xué)習(xí)與常規(guī)雷達(dá)識(shí)別技術(shù)最主要差異在于采用特征的不同,技術(shù)途徑也因特征提取的方法不同而具有一定的差異。
常規(guī)雷達(dá)識(shí)別區(qū)別于深度學(xué)習(xí),最主要的差異在于采用的特征不同。常規(guī)雷達(dá)識(shí)別借助專業(yè)技術(shù)人員的經(jīng)驗(yàn)進(jìn)行特征提取,采用窄帶統(tǒng)計(jì)特征、寬帶散射中心、微動(dòng)等反映了目標(biāo)散射機(jī)理的特征,具有一定的物理含義,稱為物理特征。物理特征主要通過(guò)專業(yè)人員對(duì)數(shù)據(jù)的深入分析后進(jìn)行特征提取,從而建立識(shí)別特征庫(kù),但在有限樣本情況下對(duì)復(fù)雜函數(shù)的表示能力有限,針對(duì)復(fù)雜問(wèn)題泛化能力受到一定的限制。
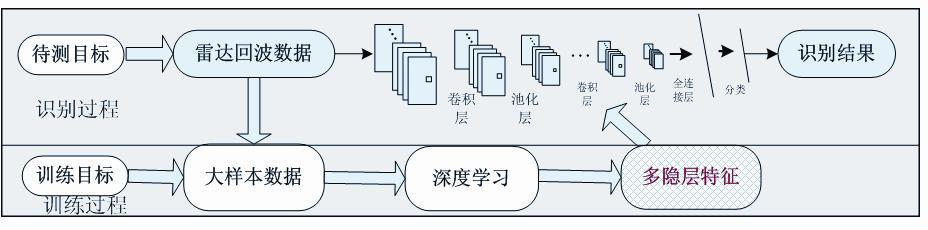
而深度學(xué)習(xí)的實(shí)質(zhì),是通過(guò)構(gòu)建具有很多隱層的機(jī)器學(xué)習(xí)模型和海量的訓(xùn)練數(shù)據(jù),來(lái)學(xué)習(xí)更有用的特征,從而最終提升分類或預(yù)測(cè)的準(zhǔn)確性。通過(guò)計(jì)算機(jī)自動(dòng)的逐層特征變換,可以學(xué)習(xí)到輸入數(shù)據(jù)的內(nèi)在特征,使得分類識(shí)別更加容易,同時(shí)模型結(jié)構(gòu)的深度化也使得對(duì)復(fù)雜函數(shù)的特征表示能力更。深度學(xué)習(xí)識(shí)別最主要的特點(diǎn)是自動(dòng)提取特征,減少了技術(shù)人員對(duì)專業(yè)知識(shí)的依賴程度。
深度學(xué)習(xí)識(shí)別最大的缺點(diǎn)是需要大量的訓(xùn)練數(shù)據(jù),充分利用訓(xùn)練數(shù)據(jù)的信息,才能形成分類約束條件,而目前限制人工智能在軍事領(lǐng)域應(yīng)用的關(guān)鍵問(wèn)題就在于:短時(shí)間、強(qiáng)對(duì)抗的交戰(zhàn)環(huán)境能夠提供的機(jī)器學(xué)習(xí)樣本數(shù)量太少,導(dǎo)致人工智能難以在對(duì)抗環(huán)境中施展;并且深度學(xué)習(xí)獲得的隱層特征物理含義不明確,武器系統(tǒng)出現(xiàn)問(wèn)題后難以定位。因此直接在武器裝備中采用深度學(xué)習(xí)等人工智能識(shí)別技術(shù)與裝備特點(diǎn)不相適應(yīng),需要進(jìn)一步挖掘新的人工智能途徑,研究人工智能在武器裝備應(yīng)用的模式。
認(rèn)知學(xué)識(shí)別在實(shí)時(shí)對(duì)抗復(fù)雜環(huán)境下或大有可為
認(rèn)知學(xué)識(shí)別的定義和本質(zhì)仍是科學(xué)界正在努力探索研究尚未完全解決的問(wèn)題,當(dāng)前國(guó)內(nèi)外還沒(méi)有關(guān)于認(rèn)知學(xué)識(shí)別的明確定義。從工程技術(shù)角度看,可以狹義地將認(rèn)知識(shí)別理解為深度強(qiáng)化學(xué)習(xí),是帶真正推理、反饋能力的強(qiáng)人工智能。通過(guò)對(duì)歷史和當(dāng)前環(huán)境的檢測(cè)和分析,對(duì)目標(biāo)學(xué)習(xí)和推理,利用相應(yīng)結(jié)果自適應(yīng)調(diào)整識(shí)別系統(tǒng)的各項(xiàng)參數(shù),在對(duì)目標(biāo)有效、可靠且穩(wěn)健的感知的基礎(chǔ)上,快速完成認(rèn)知、反饋、調(diào)整策略、進(jìn)行決策,并在時(shí)間、空間、頻率和極化等多個(gè)維度實(shí)現(xiàn)復(fù)雜干擾條件下的智能化博弈,從而大幅度提高系統(tǒng)的識(shí)別性能。針對(duì)目前人工智能在裝備應(yīng)用中存在的問(wèn)題,主要分為兩個(gè)方面:一是深度學(xué)習(xí)網(wǎng)絡(luò)隱層參數(shù)物理解釋問(wèn)題;二是帶有反饋機(jī)制的強(qiáng)人工智能網(wǎng)絡(luò)的建立。
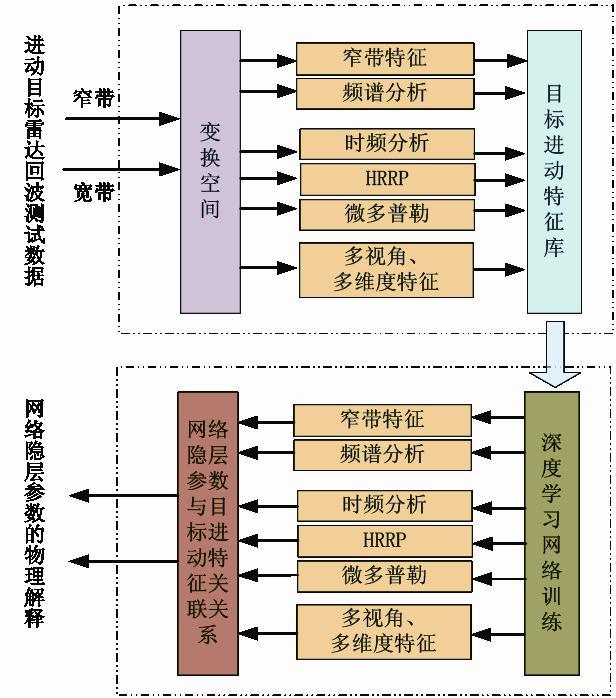
為了解決深度學(xué)習(xí)獲得的隱層特征物理含義不明確問(wèn)題,需要對(duì)深度學(xué)習(xí)網(wǎng)絡(luò)隱層參數(shù)物理含義進(jìn)行解析,并通過(guò)對(duì)目標(biāo)微動(dòng)特性的研究,建立微動(dòng)參數(shù)與深度學(xué)習(xí)網(wǎng)絡(luò)之間的關(guān)聯(lián)關(guān)系。通過(guò)對(duì)進(jìn)動(dòng)目標(biāo)的雷達(dá)回波測(cè)試數(shù)據(jù)的寬窄帶數(shù)據(jù)進(jìn)行空間變換,得到不同變換空間下的微動(dòng)特征并建立目標(biāo)進(jìn)動(dòng)特征庫(kù)。基于進(jìn)動(dòng)特征庫(kù)數(shù)據(jù)對(duì)深度學(xué)習(xí)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,根據(jù)得到的訓(xùn)練結(jié)果與目標(biāo)進(jìn)動(dòng)參數(shù)建立關(guān)聯(lián)關(guān)系,最終通過(guò)這種關(guān)聯(lián)關(guān)系對(duì)網(wǎng)絡(luò)隱層參數(shù)進(jìn)行物理解釋。
以上闡述了目前智能識(shí)別技術(shù)能夠達(dá)到的效果,對(duì)于帶真正推理、反饋能力的強(qiáng)人工智能的實(shí)現(xiàn)還需要對(duì)識(shí)別流程框架進(jìn)一步優(yōu)化。為構(gòu)建基于反饋機(jī)制認(rèn)知技術(shù)在雷達(dá)識(shí)別應(yīng)用中的初步框架,應(yīng)充分利用目標(biāo)飛行階段、關(guān)鍵事件等時(shí)間軸上的先驗(yàn)信息和知識(shí),在雷達(dá)實(shí)際跟蹤目標(biāo)的過(guò)程中,對(duì)飛行階段、關(guān)鍵事件進(jìn)行判斷,將判斷結(jié)果實(shí)時(shí)反饋到知識(shí)庫(kù)中,結(jié)合時(shí)間軸上的先驗(yàn)信息和知識(shí),通過(guò)反饋機(jī)制對(duì)知識(shí)庫(kù)進(jìn)行實(shí)時(shí)更新,從而更精準(zhǔn)地識(shí)別出目標(biāo)。
針對(duì)目前在雷達(dá)識(shí)別應(yīng)用領(lǐng)域中的難點(diǎn)技術(shù),尤其是非合作外軍目標(biāo)由于先驗(yàn)知識(shí)的匱乏、訓(xùn)練樣本少等問(wèn)題,建議采用強(qiáng)人工智能的認(rèn)知學(xué)識(shí)別方法,深入挖掘其對(duì)電磁環(huán)境的認(rèn)知、推理能力,通過(guò)多傳感器資源、信息的共享、協(xié)作、推理以及算法反饋機(jī)制,形成人工智能在武器裝備應(yīng)用的一種新模式,以達(dá)到非合作目標(biāo)智能識(shí)別的目的。
猜你喜歡
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
電子制作(2019年15期)2019-08-27 01:12:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45