海上履帶式行走施工平臺試驗機關鍵技術
2019-03-26 08:56:02吳立柱華曉濤吳中正孟奎
中國港灣建設 2019年3期
關鍵詞:施工
吳立柱,華曉濤,吳中正*,孟奎
(1.中交二航局第三工程有限公司,江蘇 鎮江 212002;2.中交第二航務工程局有限公司,湖北 武漢 430040)
0 引言
隨著“一帶一路”戰略的實施,我國基礎建設工程重心逐步由國內轉移至國外,作業環境從內陸走向外海。碼頭、人工島等沿海基礎建設工程多位于開闊海域[1-2],施工跨越季風期,面臨著中長周期波、涌浪的影響。常規的施工方式有兩種[3],一種是采用駁船,但無法在季風期正常作業,非季風期的作業窗口亦有限;另一種是采用自升式平臺,但存在著施工成本高,平臺移位定位同樣受中長周期波、涌浪的影響,移位窗口較少等缺點。
海上履帶式行走施工平臺是水陸兩棲作業平臺,在10 m水深范圍內可自由行走移動,采用坐底式履帶行走結構,施工移位不再需要定位錨的輔助,移位作業效率提高。利用長支柱支撐平臺水上結構,水線面面積小,平臺上部平穩,將不再受到長周期波、涌浪的影響,作業窗口期增加。水下履帶式行走施工平臺作為施工設備的搭載平臺,將有效解決沿海施工所面臨的運動響應大、作業窗口期少的問題,成為沿海基礎工程施工的核心設備。
國內尚無成熟的特大型水下履帶式施工裝備的研發及應用案例[4-6],為驗證海上履帶行走式施工平臺的可行性,按照1∶6縮尺比研制平臺試驗機,解決平臺系統可靠性、地形適應性、水下履帶同步性等技術難題。
1 總體性能
平臺試驗機結構主要包括上部甲板、立柱及履帶底盤。平臺甲板與立柱通過螺栓連接,立柱間由斜撐與橫梁支撐,立柱與履帶式底盤鉸接。平臺通過4個履帶底盤保證越障能力和穩定性;通過支腿內部液壓油缸的主動調節,保證上部甲板水平,抑制震動。平臺試驗機外形如圖1所示,主尺度見表1。
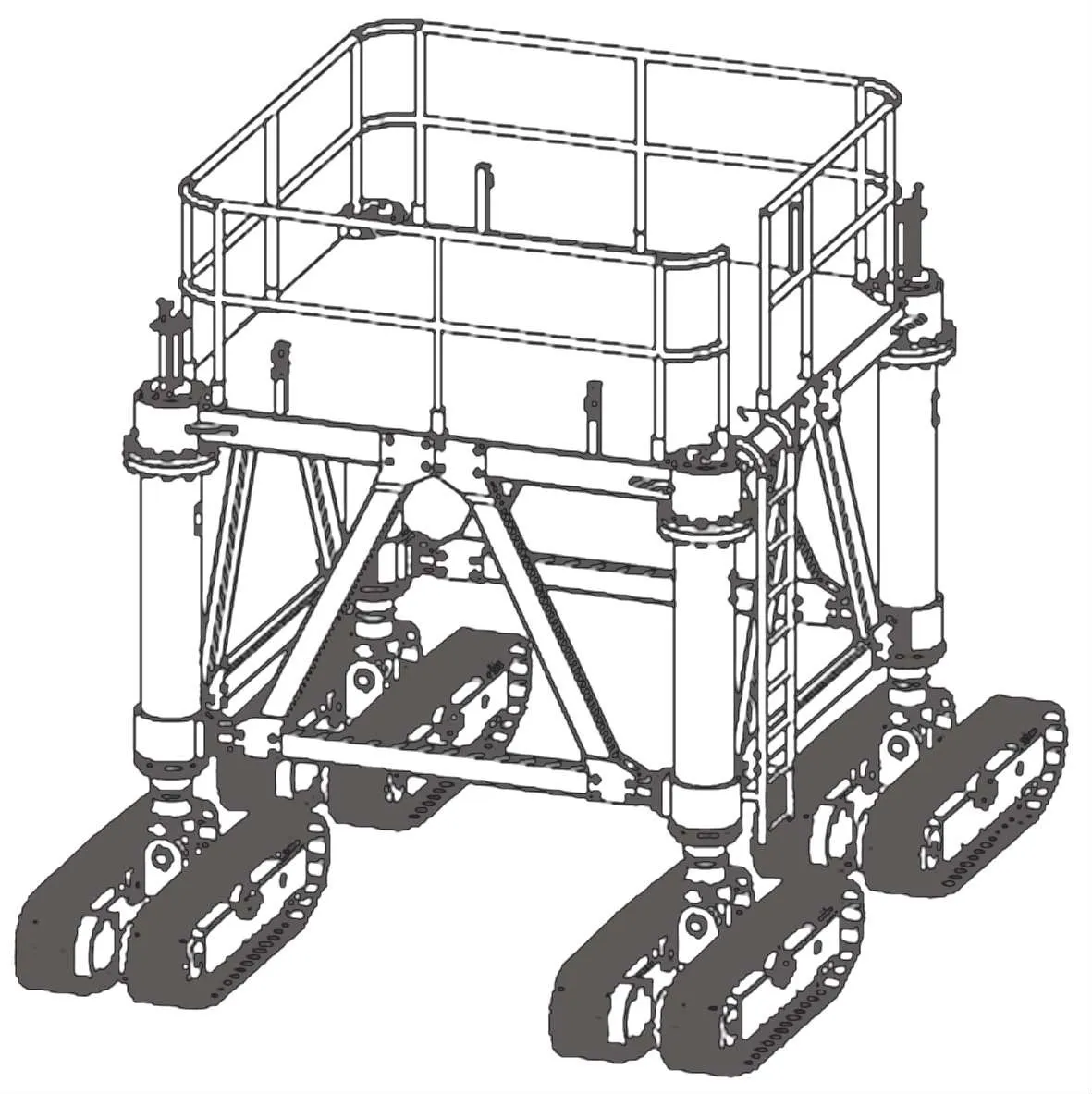
圖1 平臺試驗機外形Fig.1 The appearance of the platform testing machine

表1 平臺試驗機主尺度Table 1 Main scale of platform testing machine m
平臺甲板上安裝泵機、配電箱、控制柜、液壓油箱、蓄能器等關鍵設備,連接電路、油路、液壓閥塊和傳感器等控制元件。立柱內油缸由油管連接油箱、調平泵機、蓄能器和液壓閥塊,通過液壓閥和傳感器的控制,形成液壓調平系統。履帶底盤由油管連接油箱、行走泵機和液壓閥塊,通過液壓閥控制,形成液壓行走系統。平臺外接供電電纜,內部液壓行走系統和調平系統相互獨立,通過液壓油箱供油,設置液壓油循環回路,形成閉式液壓系統。
平臺甲板裝有水平傳感器,左前支腿裝有高程傳感器,測量油缸行程。通過高程傳感器與水平傳感器相互配合,液壓閥塊控制油缸動作,使平臺在行走越障過程中,上部結構始終保持水平。
平臺底部設有4套液壓底盤,配備8條履帶。每條履帶可以同步行走,也可差速行走。控制臺置于平臺頂部,配有信號接收和發射器,可以配合遙控器進行遠程操作。
2 設備選型
平臺總體方案確定后,需要對平臺驅動力和油缸流量進行計算[7-9],確定減速機、驅動馬達、行走液壓泵和調平液壓泵等關鍵設備的規格型號。
2.1 行走機構
平臺在行走過程中,驅動力與行駛阻力保持平衡,平衡公式如式(1)。

式中:Ft為平臺驅動力;Ff為履帶滾動阻力;Fw為水下行走海水阻力;Fi為坡度阻力;Fj為加速度阻力。
Ff=Gfcos α,Fi=G sin α
式中:G為1/4平臺總重;f為滾動阻力系數;α為爬坡度。
考慮到實際行走過程中,平臺行駛速度較慢,并且不會頻繁加減速,因此忽略海水阻力和加速阻力。在極限工況下,α取設計極限爬坡角30°,此時平臺驅動力Ft最大。
驅動負載轉矩計算公式如式(2)。

式中:Mk為驅動負載轉矩;Fks為有效牽引力;rd為驅動輪半徑;η為履帶系統效率。
Fks=0.6Ft,η=0.94
最終計算可知,Mk=3 267.7 N·m,選取對應減速機型號規格。
液壓驅動馬達負載轉矩計算公式如式(3)。

最終計算可知,Tl=62.2 N·m,選取對應液壓驅動馬達型號規格。
馬達工作壓力計算公式如式(4)。

式中:ηm為馬達效率;qm為工況排量;Pr為補油壓力。
最終計算可知,Pm=13.5 MPa,根據馬達排量選取泵型號規格。
2.2 調平系統
平臺立柱調平動作均由內部油缸控制,需要計算油缸總流量來選擇合適的調平液壓泵。油缸總流量可直接列表計算,如表2所示。
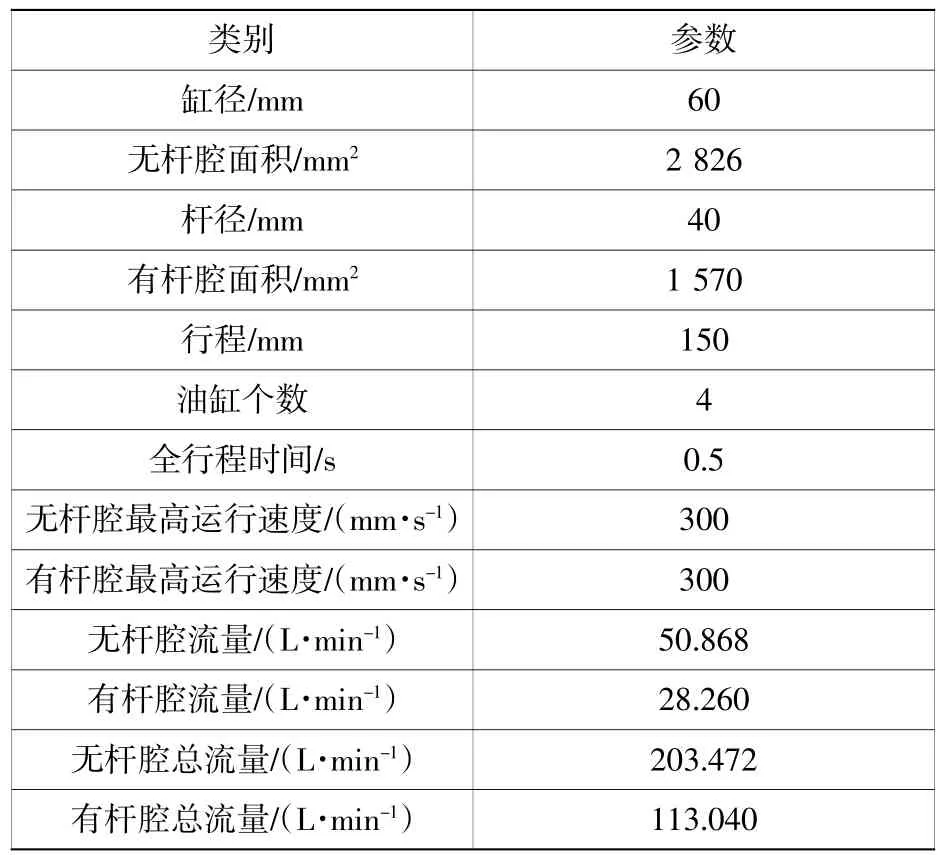
表2 調平液壓泵流量計算表Table 2 Calculation of flow in adjustment hydraulic pump
3 控制系統
平臺在行走過程中,可以適應不同的地形,通過主動控制系統使上部結構保持水平。平臺控制系統主要包括姿態調整和行走控制。
先秦“氣”論演變及對《黃帝內經》的影響……………………………………………………………………臘永紅,張麗娟(2.40)
平臺在行走過程中,通過控制立柱內部油缸,不斷調節各立柱高度,補償地形變化量,保證平臺上部結構的水平狀態。利用安裝于平臺幾何中心的水平儀和平臺高度檢測傳感器檢測平臺的姿態及高度,通過中央控制器控制支腿高度的控制閥對4個支腿分別依據平臺的姿態和高度進行調整,以實現平臺行走時適應海底工況的自動調平控制,如圖2所示。
行走控制系統采用閉式控制系統,由比例變量泵直接控制驅動馬達。通過測量驅動馬達的轉速實現轉向控制、同步控制、防打滑控制等功能。
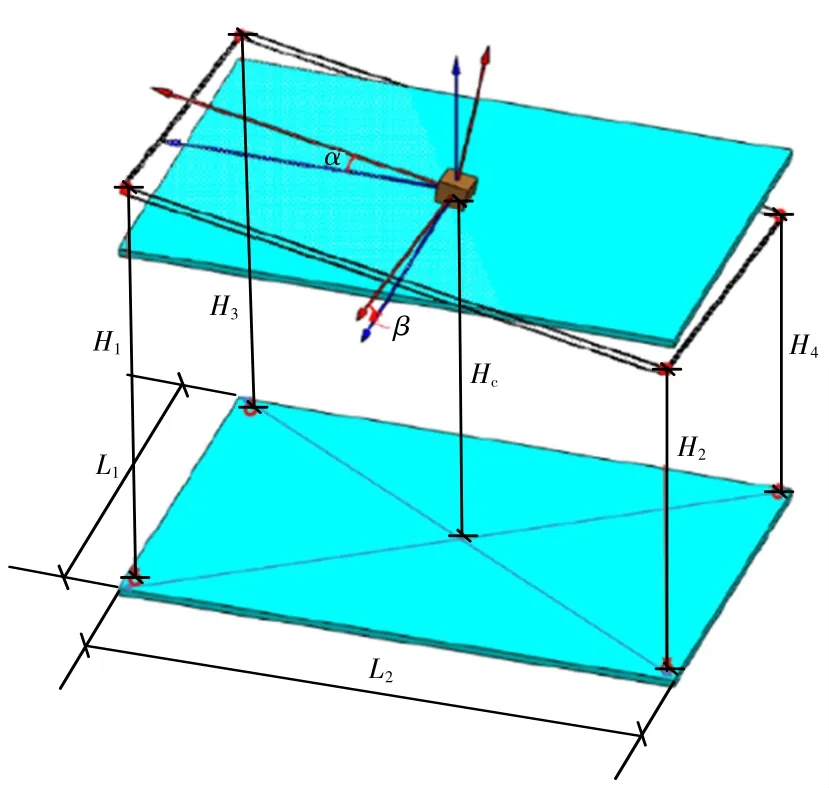
圖2 平臺姿態控制原理Fig.2 Platform attitude control principle
4 樣機試驗
平臺樣機結構拼裝在室內進行,由于樣機重量較輕,為提高安裝精度,采用倒吊法拼裝。平臺設備安裝完成后,進行整機系統調試。液壓系統是平臺最復雜的部分,調試難度最大。
平臺樣機研制完成后,進行試驗場地整理、臨時用電防護等工作,為平臺試驗做準備。平臺樣機試驗在水下行走專用場地進行(圖3)。

圖3 平臺試驗Fig.3 Platform test
4.1 直線行走
在試驗場地內的水泥地面上讓平臺以最大速度自由行走,不控制方向,記錄各項數據如表3所示。
履帶式平臺前進與后退的最大速度一樣,在0.22 m/s左右,但是前進和后退的偏轉角度和偏轉距離有較大差異。平臺偏轉均為順時針方向,但是反向行駛時平臺偏轉角度非常大,在5°左右。平臺在裝配時,履帶存在一定偏差,整體呈外八字形,因此試驗中存在較大偏轉。
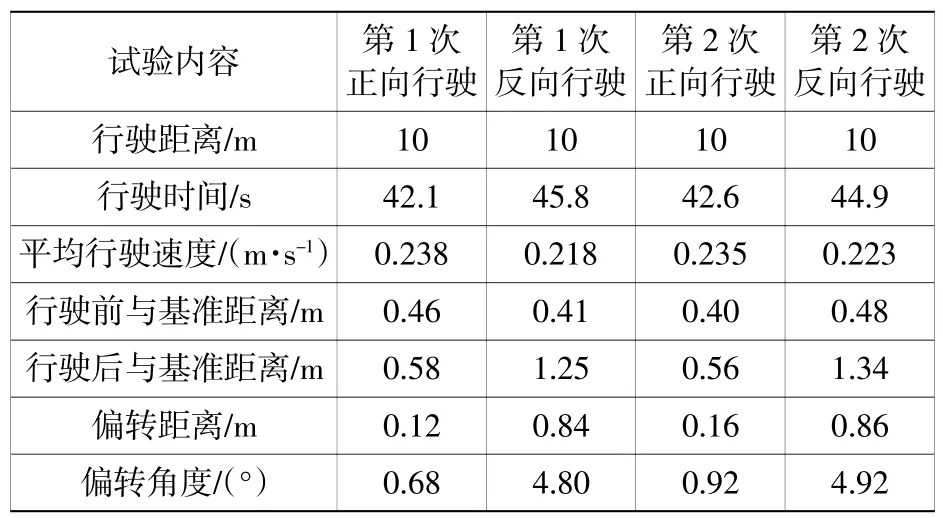
表3 平臺直線行駛速度及偏轉角度Table 3 Straight travel speed and deflection angle of platform
4.2 平臺越障
履帶式自行走平臺樣機4個立柱內部各有1個行程30 cm的油缸。履帶式平臺理論上保持平衡可通過的最大高度為30 cm,不保持平衡可通過最大障礙高度需要通過試驗驗證。
平臺分別通過15 cm、20 cm、30 cm高度障礙,可以看到立柱在通過障礙時有明顯收縮動作,平臺上部結構保持水平。平臺通過最大30 cm高度障礙可以實現自平衡。
平臺可通過的最大坑深為60 cm,平臺上部結構有明顯歪斜,上部結構不能保持平衡。
4.3 平臺轉向
分別在水泥地面、橡膠板面、碎石路面和泥面等4個接觸面上驗證履帶式平臺的轉向性能,轉向效率見表4。

表4 4種接觸面轉向效率Table 4 Four contact surface turning efficiency
履帶式平臺在水泥路面上轉向效率非常低,在履帶差速轉向一定角度后,履帶會發生持續打滑,平臺試驗機重量較輕,接觸面所提供的摩擦力不足以讓平臺完成轉向動作。平臺在泥面中轉向效果最好。
4.4 平臺上下坡
履帶式平臺樣機具有較強的上下坡能力,具有4個履帶底盤,8條履帶獨立驅動。履帶在上下10°坡地形時,其行駛速度與平地基本無差異。
履帶式平臺在上下坡過程中,如果坡度過大,平臺上部會傾斜一定角度,調節支腿油缸只能減緩這種傾斜角度,并不能完全消除。
在支腿未升起和升起兩種狀態下均進行了爬坡試驗,在爬坡過程中,支腿油缸有一定的調節作用,不能使平臺完全保持水平,這與平臺上部使用的水平傳感器、控制程序和地形坡度有關。
4.5 水下行駛
按照規范對履帶的對地壓力和試驗場地中泥面的承載能力進行估算,試驗地基承載能力僅為平臺試驗機對地壓力的一半,在行走過程中,履帶底盤必然會陷入試驗泥面中,有可能會導致平臺無法通過試驗場地的泥面。
為驗證履帶式平臺的地形適應性,使履帶式平臺正常行駛通過淤泥泥面。試驗結果良好,雖然履帶式底盤有一半陷入泥面,但是整個平臺能夠順利快速地通過試驗泥面。
履帶正常行駛通過注水后的淤泥泥面,行駛過程快速平穩,履帶式平臺同樣能夠較好地適應水下行駛的環境。
4.6 試驗結論
1)試驗結束后,對履帶式平臺進行整體檢查。履帶底盤整體情況良好,無機油滲漏,履帶承重軸無變形、無異響。平臺結構完好,無變形。平臺液壓系統正常,無滲漏。履帶式平臺的系統可靠性良好。
2)平臺試驗機行走速度為0.22 m/s,達到了設計速度。履帶式底盤能提供足夠的驅動力,平臺功率滿足設計要求。平臺保持平衡最大越障高度30 cm,可通過最大坑深60 cm,可順利通過淤泥地形,快速上下坡,地形適應能力良好。
3)平臺8條履帶可同步行走,也可差速轉向。平臺履帶呈外八字形,直線行走存在5°左右偏轉。可通過提高平臺結構安裝精度來增強履帶同步性。
5 結語
海上履帶式行走施工平臺試驗機通過兩套獨立的液壓系統驅動,實現水下履帶行走、主動調平和抑制震動等功能,具有差速行駛和遠程控制等特點,能很好地適應水下特殊地形。該試驗機的研制,成功解決了平臺系統可靠性、地形適應性、水下履帶同步性等技術難題,為履帶式平臺實體機的研制奠定了夯實的基礎。海上履帶式行走施工平臺是我國自主研發的新型沿海施工通用平臺,為解決海外中長周期波海域面臨的施工難題提供了新的方法,對海上通用施工裝備研發具有重要的參考和借鑒意義。
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48