非定常激勵下等離子體DBD誘導渦特性研究
2019-03-19 05:26:00王玉帥鄭博睿
空氣動力學學報 2019年1期
薛 明, 高 超,*, 劉 峰, 王玉帥, 鄭博睿
(1. 西北工業大學, 陜西 西安 710072; 2. 加州大學爾灣分校, CA 92697-3975; 3. 西安理工大學, 陜西 西安 710072)
0 引 言
等離子體介質阻擋放電(Dielectric-Barrier-Discharge, DBD) 激勵器作為一種新型流動控制技術,被廣泛用于邊界層控制[1]、提高翼型升力系數[2]、增大翼型失速迎角[3-4]以及控制高升力機翼流動分離[5]等。相較于傳統的流動控制方法,等離子體DBD激勵器有以下優點:沒有移動部件、響應快速、自身質量小以及輸入功率低等[6]。傳統的等離子體DBD激勵器由裸露電極與埋藏電極組成,通常上電極裸露在空氣中,下電極包覆在介電材料中,在高頻高壓電的作用下,下電極上方會形成等離子體(Plasma)并向周圍空氣注入動量、熱量等以起到控制流動的作用。
常用的等離子體交流電電源有兩種形式:定常激勵與非定常激勵。定常激勵時,電源波形是高頻高壓的正弦波,而非定常激勵是帶占空比循環放電(如圖2所示),其有兩個重要參數:占空比τ與脈沖頻率f。目前,各國學者將等離子體氣動激勵產生的推力大小作為衡量定常流動控制效果的關鍵因素,且該推力與激勵器幾何參數、電壓、載波頻率等參數有關。而在非定常激勵時,誘導渦是流動控制關鍵因素[7],相關文獻[8-12]認為在非定常激勵下,等離子體流動控制更為有效,因此,研究等離子體DBD在非定常激勵下的誘導渦結構以及發展規律對提高等離子體DBD非定常流動控制效果有著非常重要的意義。為研究非定常流動控制激勵,提出了無量綱頻率F+=fc/U,其中f為脈沖頻率,c為特征長度,U為來流速度,目前對于最優無量綱頻率的選取尚未達到一致,Mehul P. Patel[13]和Sidorenko[14]等人認為無量綱頻率F+≈1時,流動控制效果最優,而Asada[15]和Sekimoto[16]等人卻認為最優無量綱頻率F+≈10。綜上所述,對于等離子體DBD非定常流動控制機理有待進一步研究。
目前對非定常激勵下DBD流動控制效果的研究大多集中在實際應用如翼型分離流動、繞圓柱流動等等,理解靜止大氣下DBD誘導渦結構以及脈沖頻率對渦結構的影響是進一步提高DBD流動控制能力的基礎。DBD誘導流場產生的渦結構由兩種形態:啟動渦與誘導渦。Whalley[17]研究了靜止大氣下等離子體DBD啟動渦的自相似性,且啟動渦移動方向與壁面呈31°,渦核沿壁面和法向位置與時間成t2/3,渦核移動速度與時間成t-1/3。張屹[18]等對大氣壓下DBD啟動渦結構進行了研究,認為等離子體啟動渦有三種渦系結構:主渦、反向渦和二次渦,并分析了主渦與反向渦的產生與發展過程。張鑫[19]等研究了對稱式布局等離子體DBD誘導的啟動渦在來流條件下的時空演化以及生存時間的影響,認為對稱式布局的等離子體DBD對邊界層具有摻混與射流兩種效應,具有在高雷諾數下應用的潛力。
本文采用了高速PIV與高速紋影系統對非定常激勵下DBD誘導渦結構進行了細致的分析,主要研究了脈沖頻率對DBD誘導渦結構影響,揭示了誘導渦的發展規律以及脈沖頻率對誘導渦尺度的影響,并分析了不同脈沖頻率下誘導渦的相互作用對渦結構的影響。
1 實驗設備
實驗采用DBD等離子體激勵器如圖1所示,激勵器由上下銅箔電極(3M 1181)以及介電層組成,其中銅箔厚度約為0.066 mm,介電層為3層Kapton薄膜一共約為0.3 mm厚度,介電常數為3.2。激勵器有效放電長度為220 mm,上下電極寬度分別為2 mm與4 mm。上電極連接等離子體電源高壓正極,下電極連接等離子體電源負極(即接地)。采用了南京蘇曼生產的等離子體低溫電源CTP-2000K,峰峰電壓為0~30 kV,中心頻率為10 kHz,可調范圍5~20 kHz,脈沖調制信號由外接Tektronix公司生產的函數發生器AFG3021輸入給等離子體電源,采用了Tektronix公司生產的高壓探頭P6015A來測量施加在DBD等離子體激勵器上的峰峰電壓,并連接示波器TDS1001B。圖2給出了定常激勵與非定常激勵波形圖,其中定常激勵(steady)為穩定的正弦波,非定常激勵為在正弦波的基礎上加入脈沖調制信號并控制占空比與脈沖頻率。
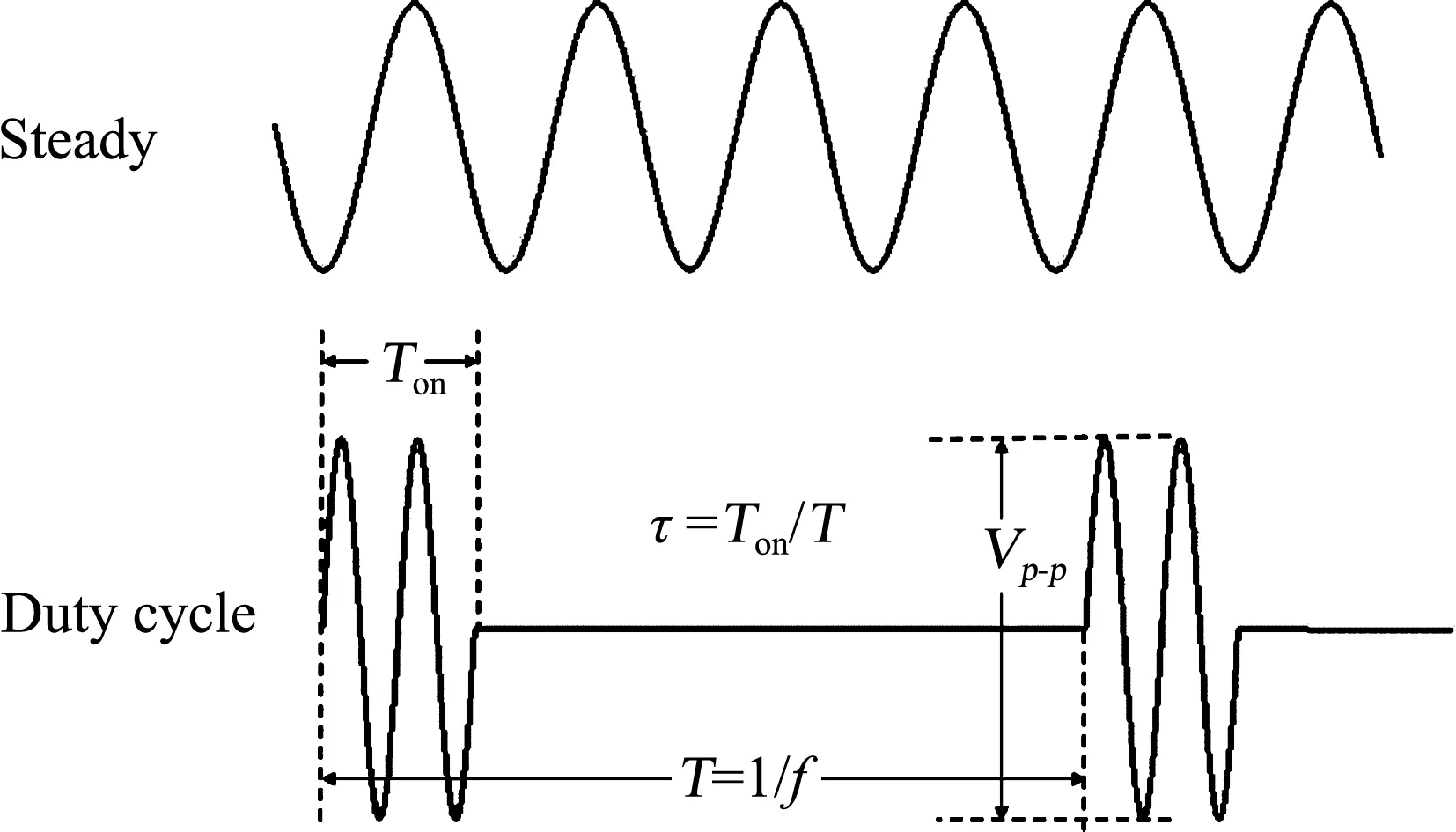
圖2 定常激勵與非定常激勵波形圖Fig.2 Waveforms of steady and unsteady excitation
實驗采用了高頻粒子圖像測速儀(Particle Image Velocimetry, PIV)測量非定常激勵下等離子體DBD誘導流場,PIV布局圖如圖3所示,為確保所測流場不被外界環境干擾,PIV的測量全部在玻璃箱中進行,其長寬高分別600 mm、200 mm和300 mm。PIV系統為德國Lavision生產,主要由激光器、相機、同步器和計算機組成,整套系統安裝在光學實驗臺上使得各個方向位置均可隨意調整。其中激光器為Photonics Industries DM Series Laser,最大單次脈沖能量為30 mJ,激光厚度為0.6 mm;高速相機為Phantom V711,最大分辨率為1280×800 pixels,最高采集頻率為7,500 Hz。相機拍攝視場約為80 mm×50 mm,實驗采集頻率設置為1,000 Hz,激光脈沖時間間隔不同狀態有所變化約為100~300 μs。PIV示蹤粒子采用了電影工業常用的煙餅,通過管道連接氣泵由particle inlet輸入到玻璃箱中,并從Particle outlet排出,每次實驗注入粒子后大約二十分鐘待其混合均勻后開始拍攝。后處理軟件為Davis 8.3,其中診斷窗口為32×32 pixels,overlap設置為75%以獲得更為精細的流場結構。為確保流動的二維特性,PIV的激光面置于激勵器的展向中間位置。
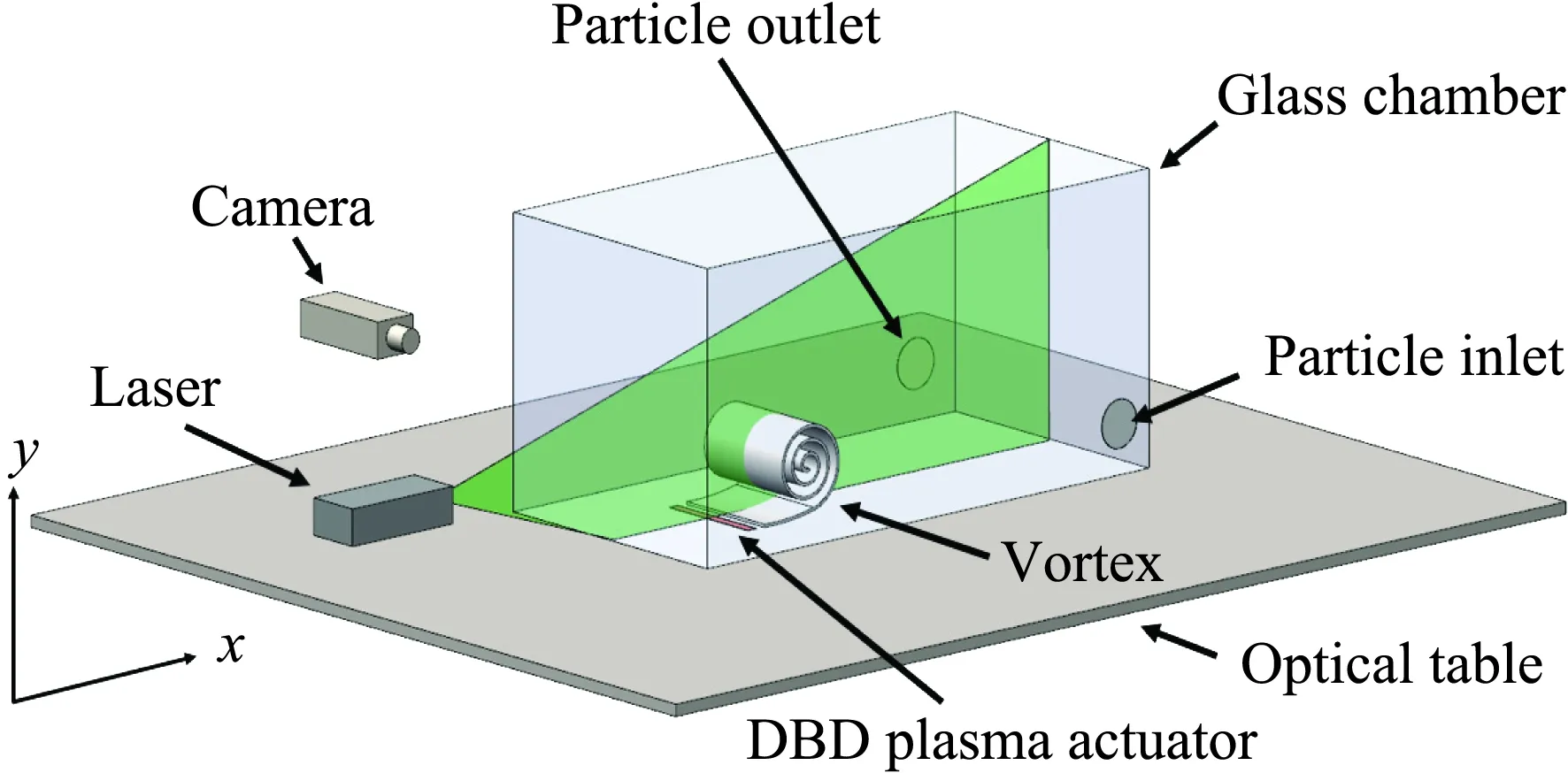
圖3 高頻PIV實驗布局圖Fig.3 The experimental set-up for PIV measurements
本文采用高速紋影系統如圖4所示,高速紋影系統由以下幾個部分組成:鹵鎢燈光源系統、凹透鏡、平面鏡、刀口以及高速攝像機。其中凹透鏡的焦距為2900 mm,所有光學鏡面涂有氧化鋁和二氧化硅保護膜,支座具有水平與豎直方向調節功能以調節光路,刀口調節精度為0.01 mm且具備360°旋轉功能,光源系統包含24 V,400 W的鹵鎢燈、可調節的狹縫(調節精度為0.01 mm,可調節范圍0~3 mm,360°可旋轉)。高速攝像機為Phantom v2512,其分辨率為1280×1280 pixel,最高采集頻率為75,000 Hz,最小曝光時間為1 μs,本實驗中采集頻率設置為10,000 Hz。
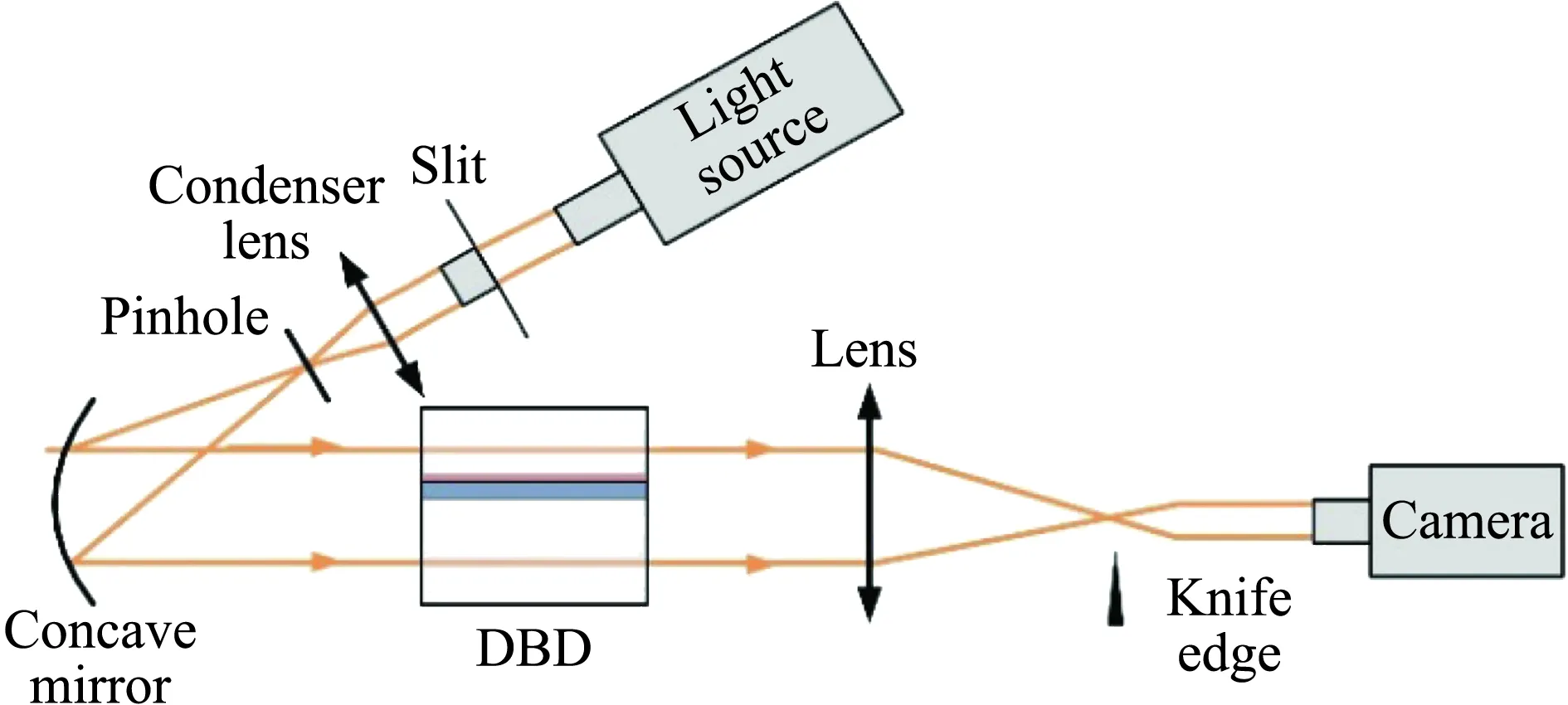
圖4 高速紋影布局圖Fig.4 Principle of schlieren system
2 誘導渦結構及演化規律
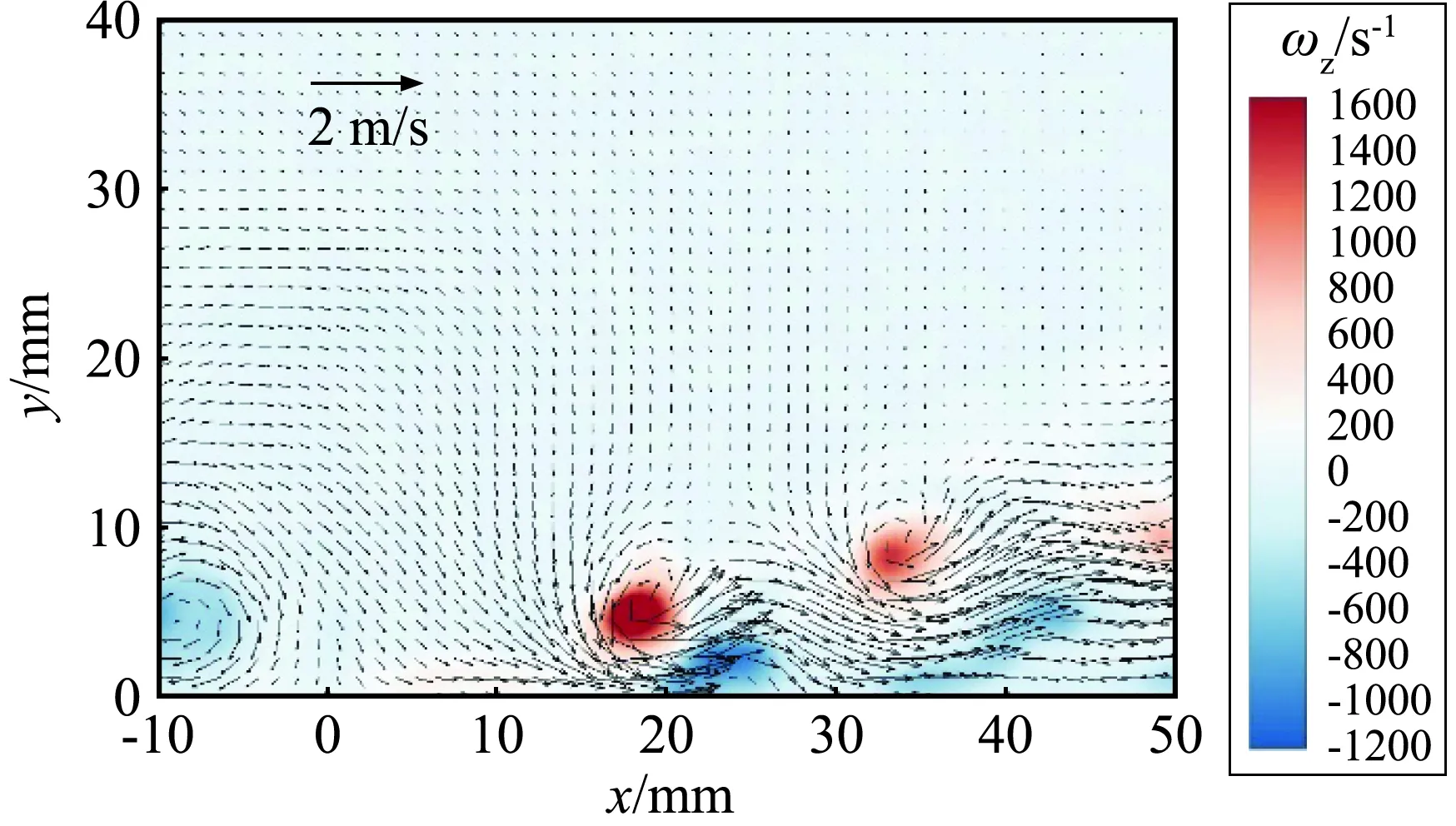
圖5分別給出了在Vp-p=14 kV,F=8 kHz,τ=50%,f=30 Hz時誘導渦在不同時刻的結構,左邊為紋影圖像,右邊為PIV流場結果,其中包含了速度矢量與渦量云圖,渦量ωz=?v/?x-?u/?y。從圖中可以看出紋影與PIV給出的渦結構,且兩者非常吻合,誘導渦在放電瞬間產生,在體積力作用下沿著X與Y正方向移動,為滿足無滑移邊界條件,二次渦伴隨產生(右圖中紅色渦量下方藍色區域),且二次渦與主渦方向相反。
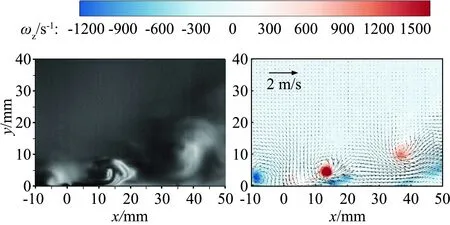
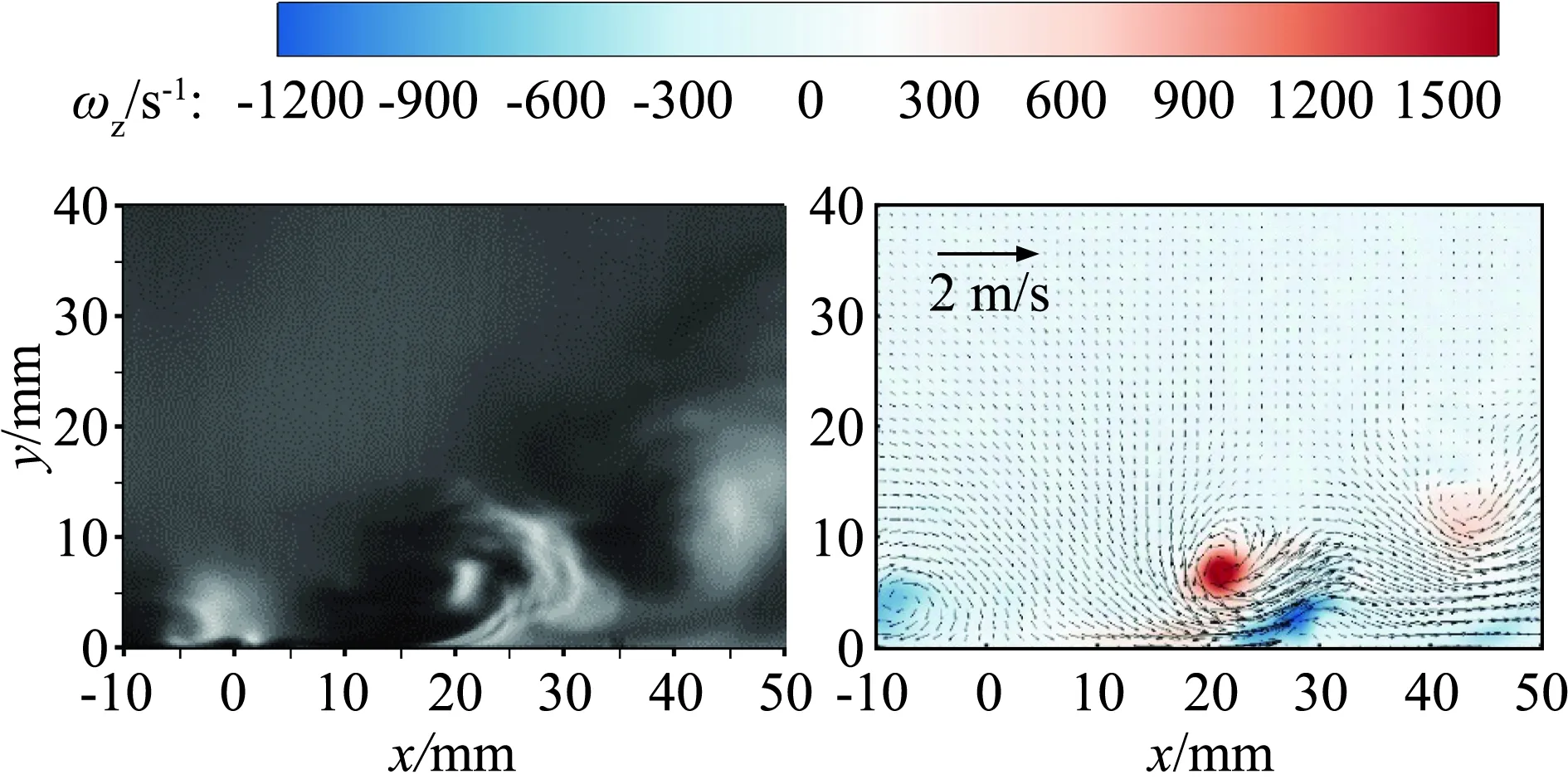
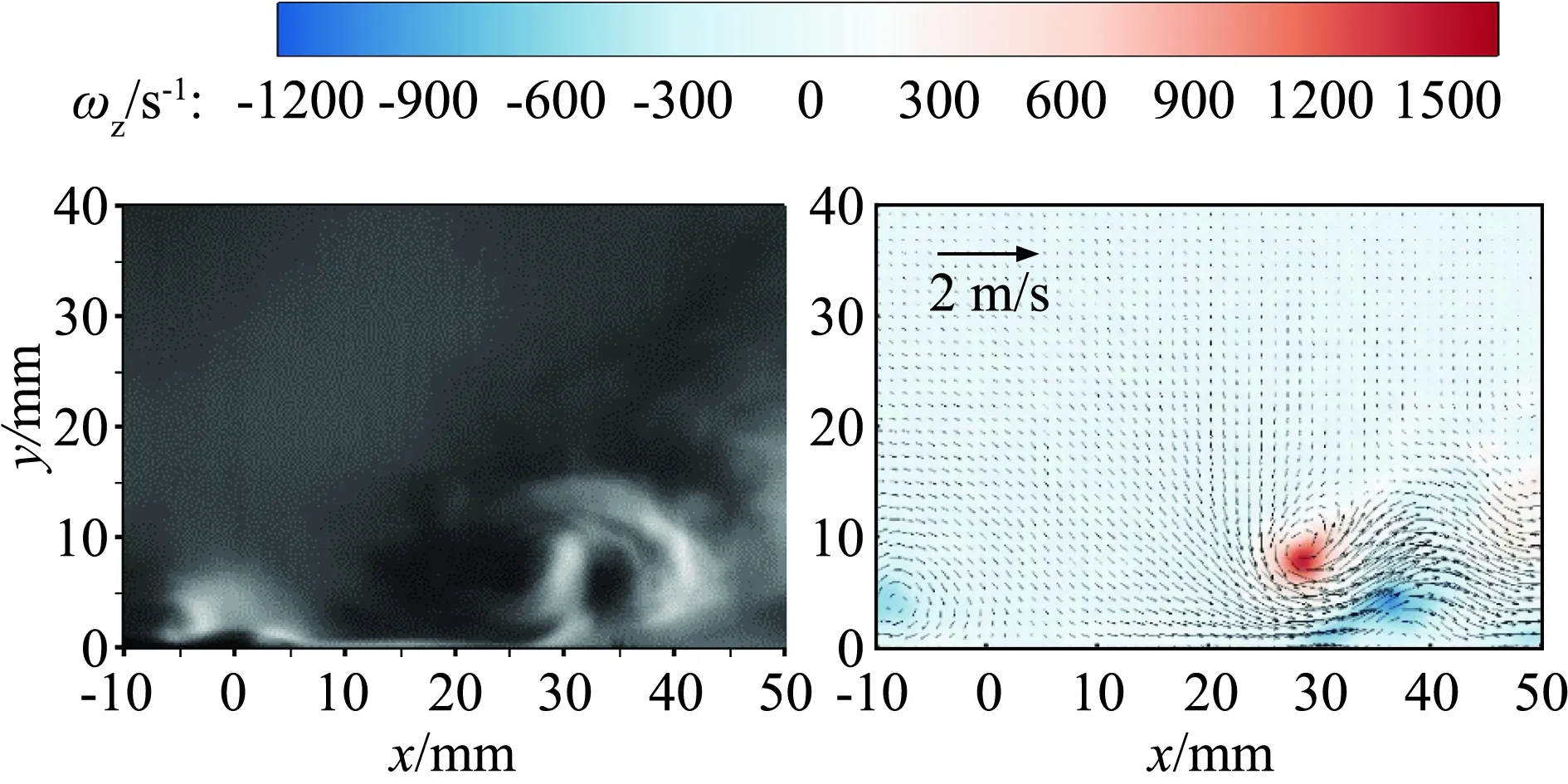
圖5 PIV和紋影的誘導渦結構Vp-p=14 kV, F=8 kHz, τ=50%,f=30 Hz(t=10 ms,20 ms,30 ms)Fig.5 The vortex structure of vortex induced by DBD plasma actuator at Vp-p=14 kV, F=8 kHz, τ=50%,f=30 Hz(t=10 ms,20 ms,30 ms)
在定常激勵下,放電瞬間產生啟動渦,隨后啟動渦消失形成穩定的壁面射流,非定常激勵下,在占空循環作用下,產生一系列誘導渦,為此將非定常激勵下等離子體DBD單個誘導渦發展分為兩個階段:1.t
總結誘導渦整體演化規律如圖6所示,1) 在一個脈沖初期,誘導渦在放電瞬間后產生,并逐漸沿壁面射流方向移動,與此同時,二次渦生成且伴隨主渦移動;2) 誘導渦逐漸向x與y正方向移動,其強度在粘性耗散作用下逐漸減弱;3) 在下一個放電開始時產生下一個誘導渦,周而復始。非定常激勵下,所施加的高頻高壓AC電源存在嚴格的周期性,而從上文可知,誘導渦連續不斷的產生,因此驗證誘導渦是否具有周期性是進一步研究誘導渦特性的關鍵。圖7給出了Vp-p=14 kV,F=8 kHz,τ=50%,f=10 Hz下t=20 ms和t=120 ms的速度矢量圖以及渦量云圖,注意到此時脈沖周期T=1/f=100 ms。從圖中可以看出,在不同周期內的同一相位上,誘導渦位置與結構極其相似,在本文所研究其它脈沖頻率時,其結論依然成立。圖8給出了從PIV結果和紋影圖像中獲得的1 s內產生誘導渦個數與脈沖頻率的對應關系,可以看出,在f=5~500 Hz范圍內,1 s內誘導渦產生的個數與脈沖頻率嚴格一一對應。
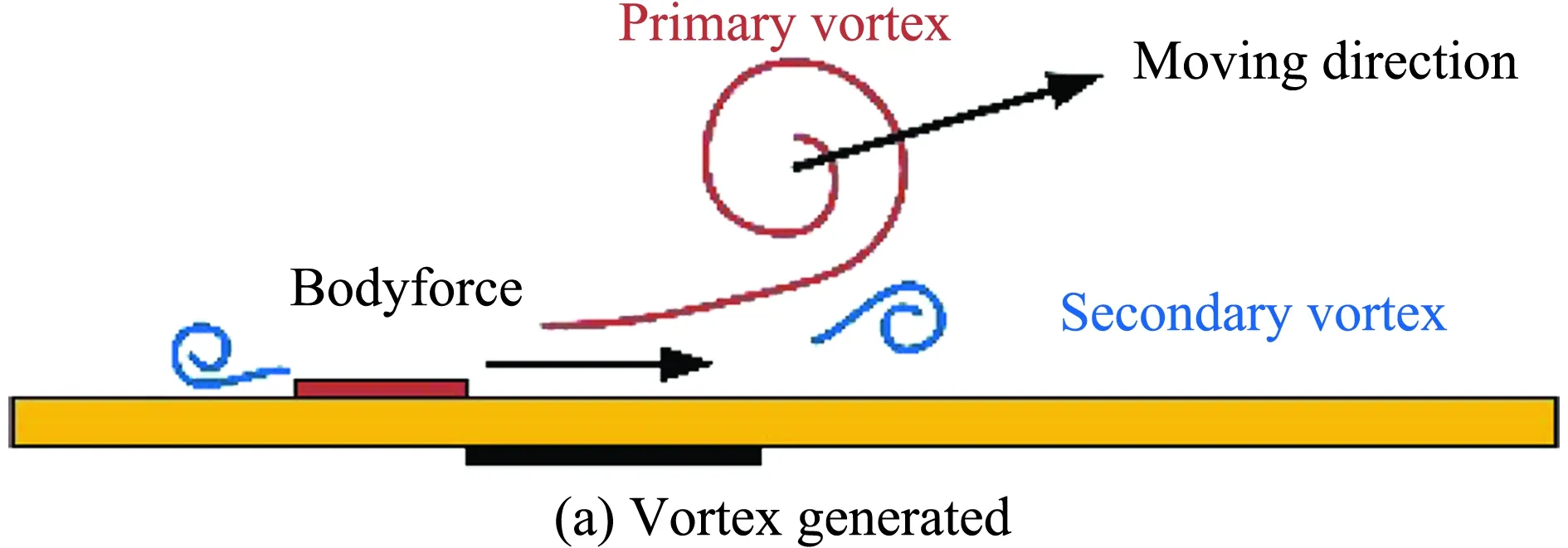
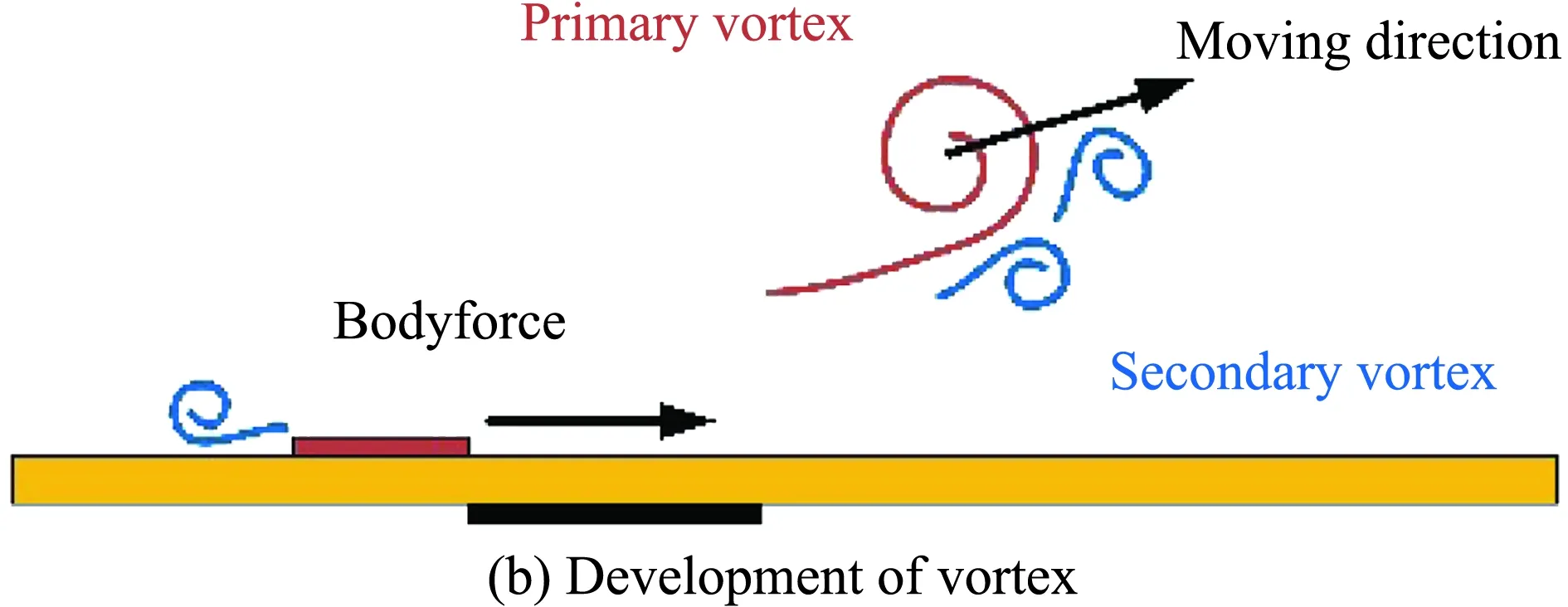
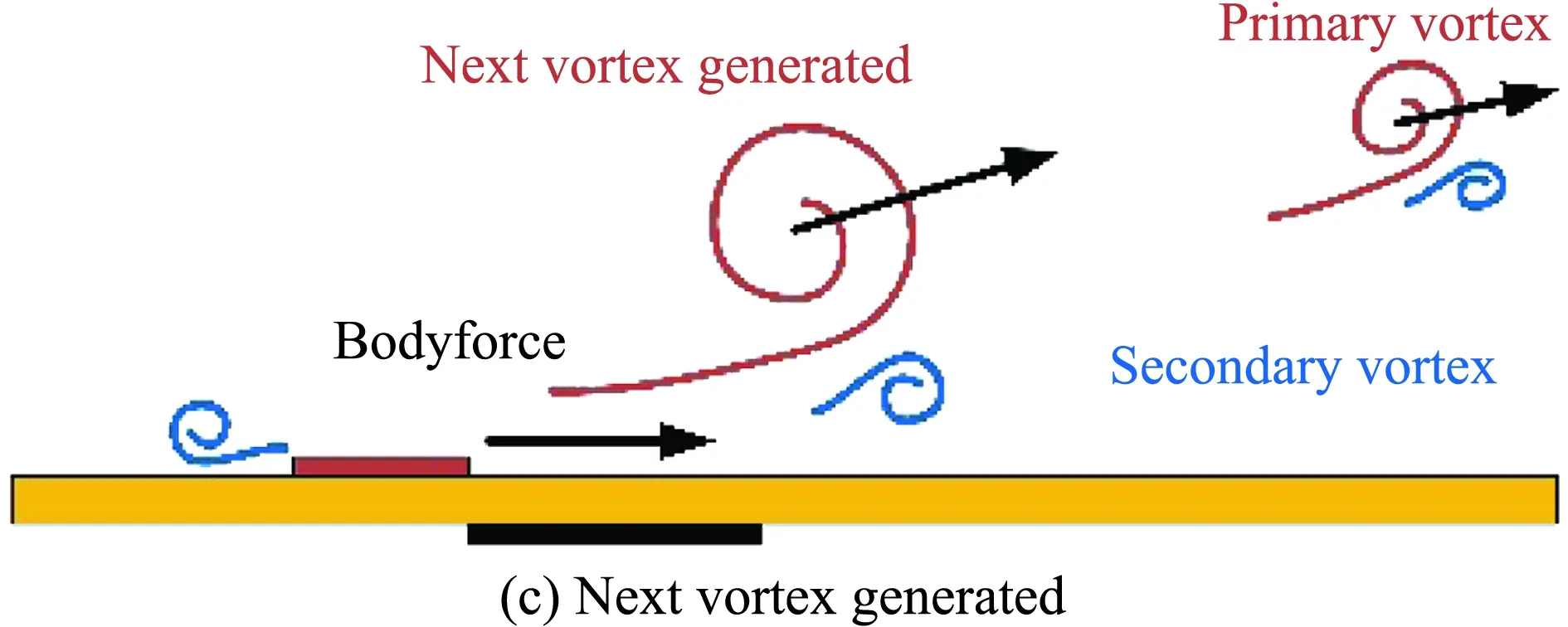
圖6 非定常激勵下誘導渦發展規律Fig.6 The evolution of the vortex induced by the plasma actuator of duty cycled flow
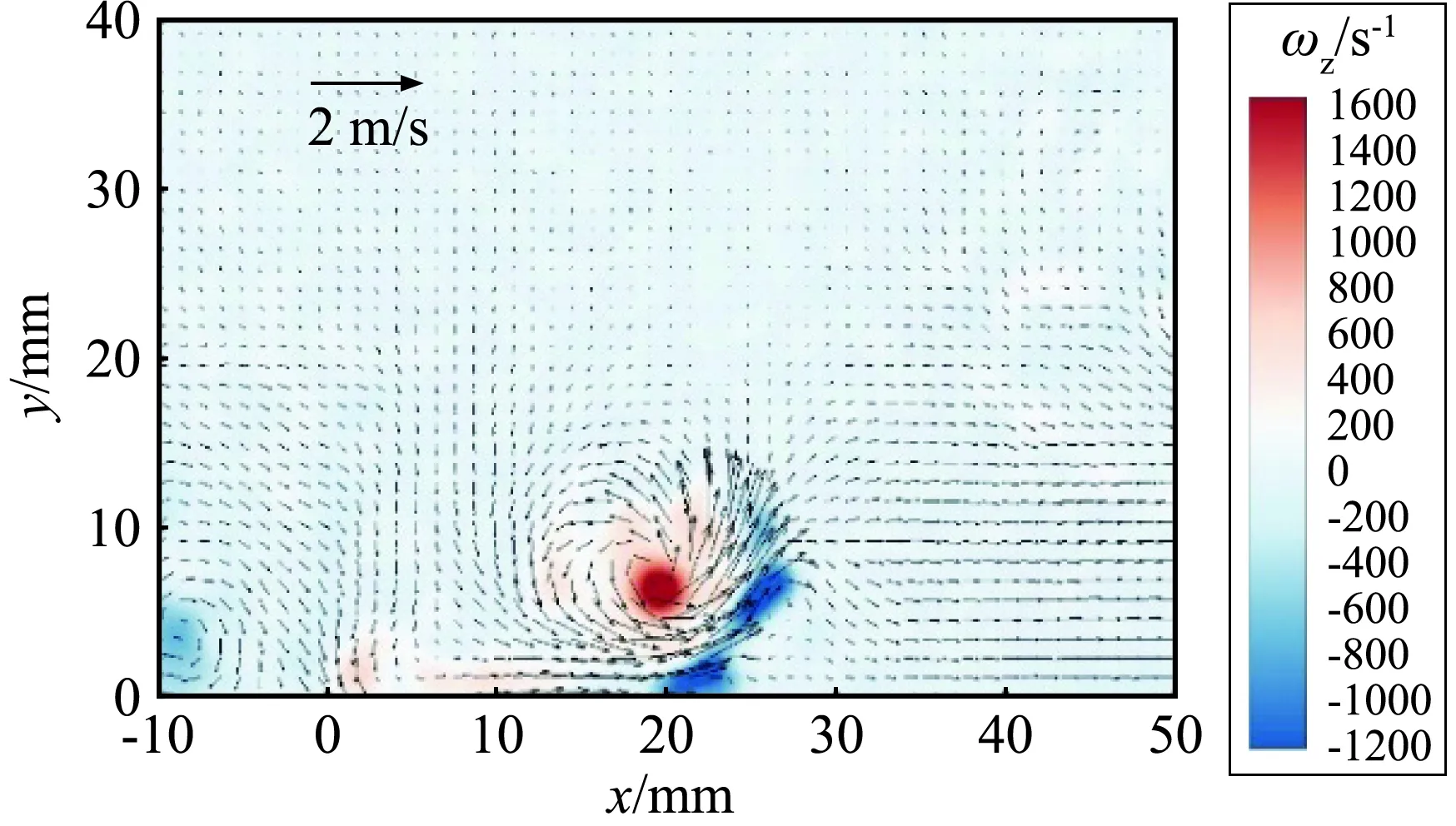
(a) t=20 ms
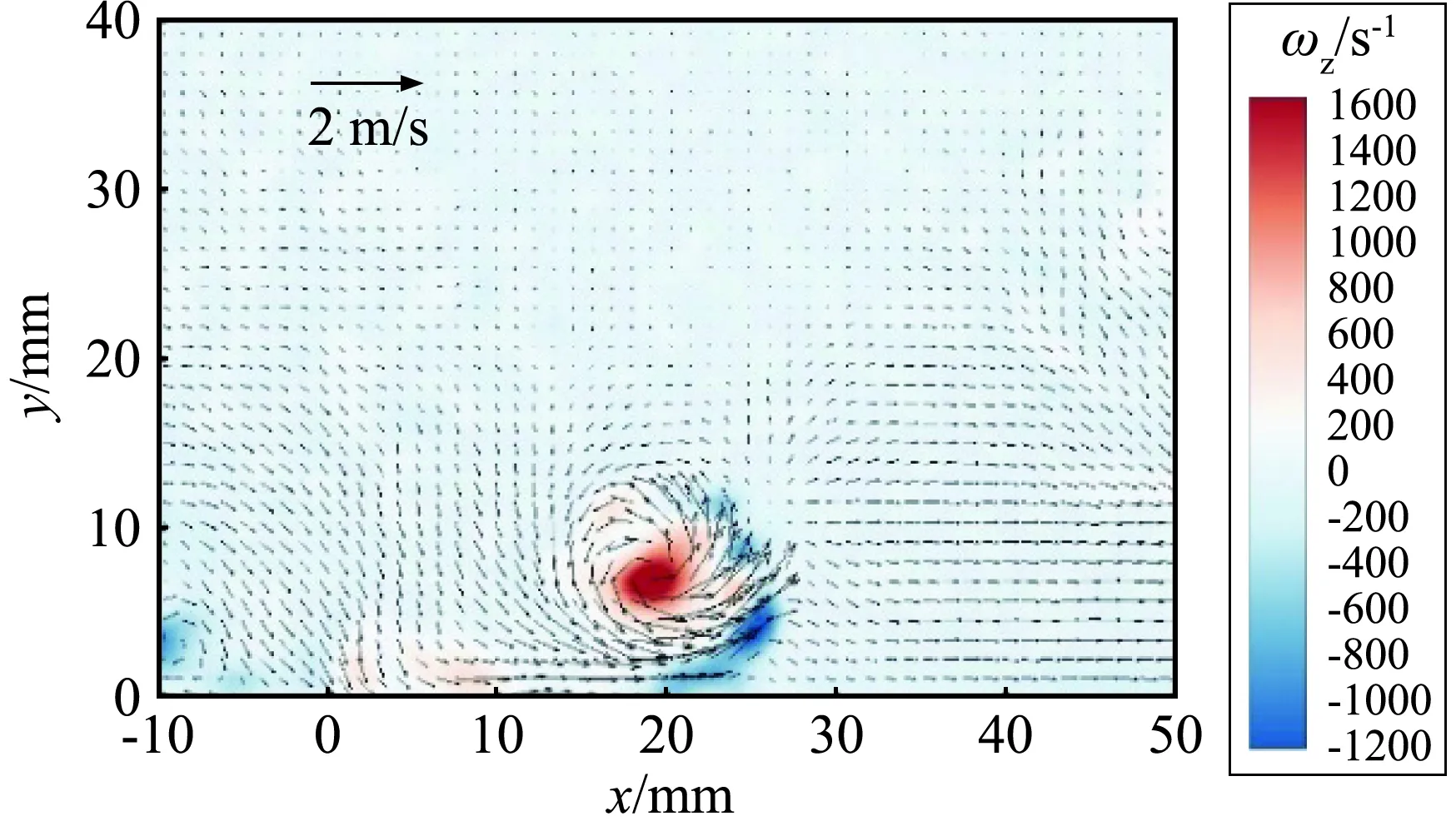
(b) t=120 ms
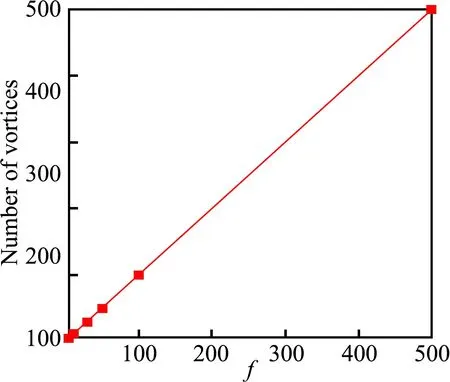
圖8 1 s內誘導渦個數與脈沖頻率的關系Fig.8 Numbers of vortices vs burst frequency in t=1 s
3 脈沖頻率對誘導渦尺度的影響
圖9給出了在Vp-p=14 kV,F=8 kHz,τ=50%,f=10 Hz時5個周期內渦核移動位置,其中渦核位置采用由Jinhee Jeong and Fazle Hussain[20]提出的λ2法則確定,λ2是S2+Ω2三個特征值中處于中間的特征值, 其中S和Ω分別是u中的對稱張量與非對稱張量,考慮到由等離子體DBD誘導的流場為二維平面流動即:u=ui+vj。從圖中可以看出在5個不同周期內,其渦核移動軌跡表現為極好的周期性,這也進一步驗證了上文中提到的等離子體DBD誘導渦具有良好的周期性。
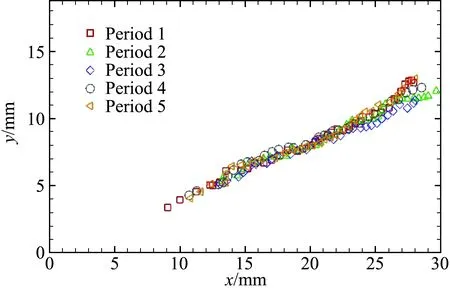
圖9 Vp-p=14 kV, F=8 kHz, τ=50%,f=10 Hz五個周期渦核移動軌跡Fig.9 Instantaneous vortex cores in 5 periods at Vp-p=14 kV, F=8 kHz, τ=50%,f=10 Hz
圖10給出了Vp-p=14 kV,F=8 kHz,τ=50%下在不同脈沖頻率時誘導渦核移動軌跡,誘導渦渦核移動方向與壁面呈16°~22°,且隨著脈沖頻率的增加,誘導渦核移動軌跡更靠近壁面,這與whalley[17]等人發現啟動渦沿著壁面31°方向移動有著較大的區別,啟動渦在放電瞬間產生,隨后啟動渦在粘性作用下逐漸消失并形成穩定的壁面射流,而在非定常激勵下,誘導渦連續不斷的生成、耗散、再生成,且一定時間內誘導渦個數與脈沖頻率存在對應關系,當誘導渦生成后,如不考慮誘導渦之間相互作用,在某種程度上,此時每一個誘導渦即是啟動渦,而實際上由于存在渦之間的相互作用,導致新生成的誘導渦會受到空間上已經存在的一系列誘導渦的影響,且該影響與脈沖頻率有關。
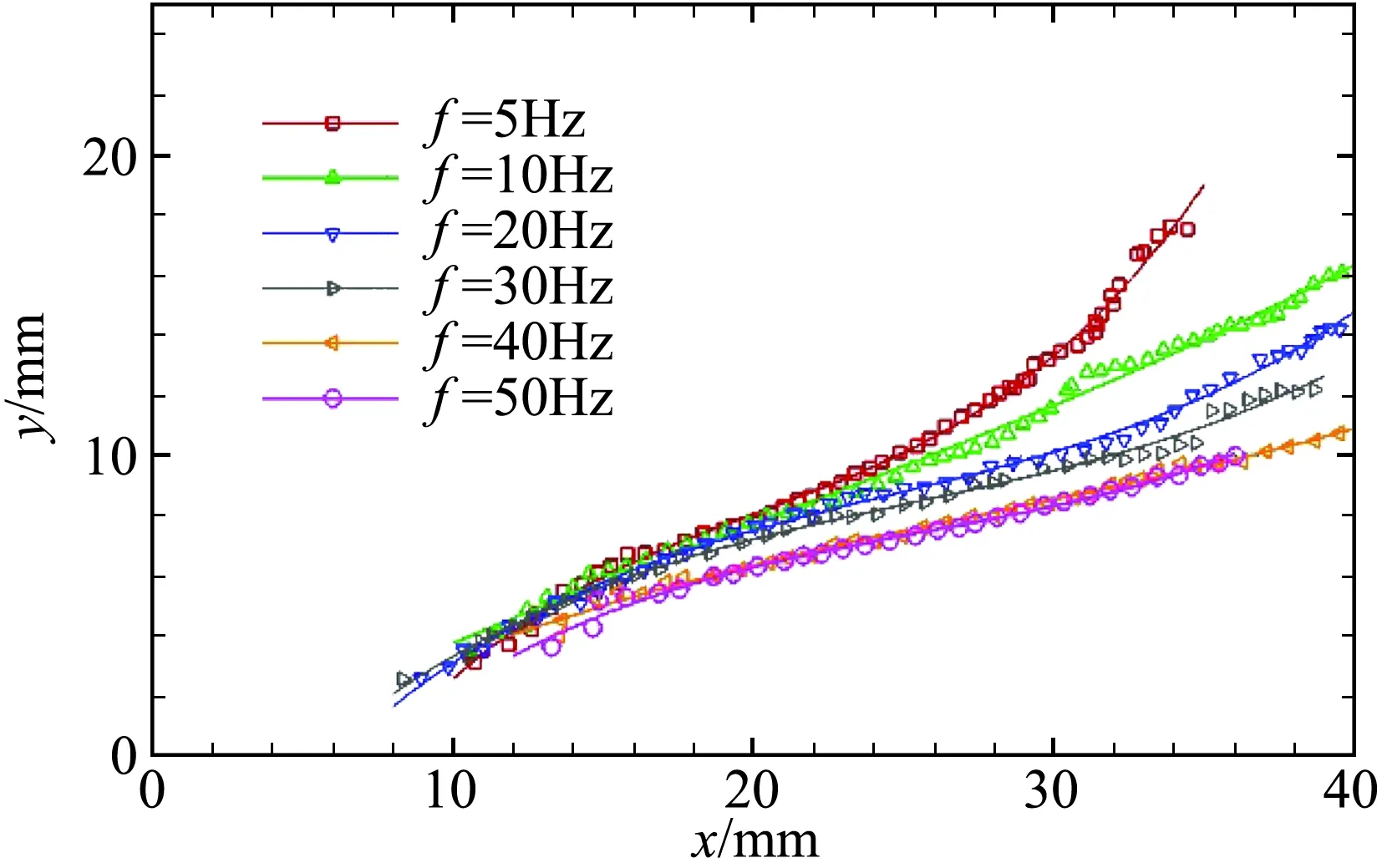
圖10 Vp-p=14 kV, F=8 kHz, τ=50%時不同脈沖頻率下渦核移動軌跡Fig.10 The trajectory of vortex cores at different burst frequencies when Vp-p=14 kV, F=8 kHz, τ=50%
圖11給出了t=15 ms在Vp-p=14 kV,F=8 kHz,τ=50%,f=20 Hz和f=50 Hz時的速度矢量圖與渦量云圖,從圖中可以看出,在脈沖頻率較小時,等離子體DBD誘導渦之間間距較大,前一個誘導渦對后一個誘導渦的影響較小;當脈沖頻率為50 Hz時,誘導渦之間的影響逐漸變得劇烈。圖12給出了誘導渦之間相互干擾的原理圖,設誘導渦之間距離為d,隨著m脈沖頻率的增加,d逐漸減小,考慮在新生成誘導渦邊沿點P,點P受到前一個誘導渦的影響隨著脈沖頻率的增加而逐漸變強,且前一個誘導渦對點P的誘導速度與點P當前所處誘導渦速度相反,因此,當脈沖頻率增加時,誘導渦之間相互影響逐漸變得劇烈,使得流場更靠近壁面動量交換變強。另外從圖中還可以看出,隨著脈沖頻率的增加,誘導渦尺度逐漸變小。
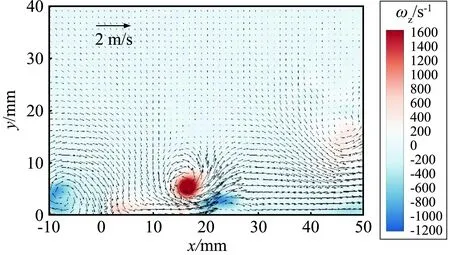
(a) f=20 Hz
(b) f=50 Hz
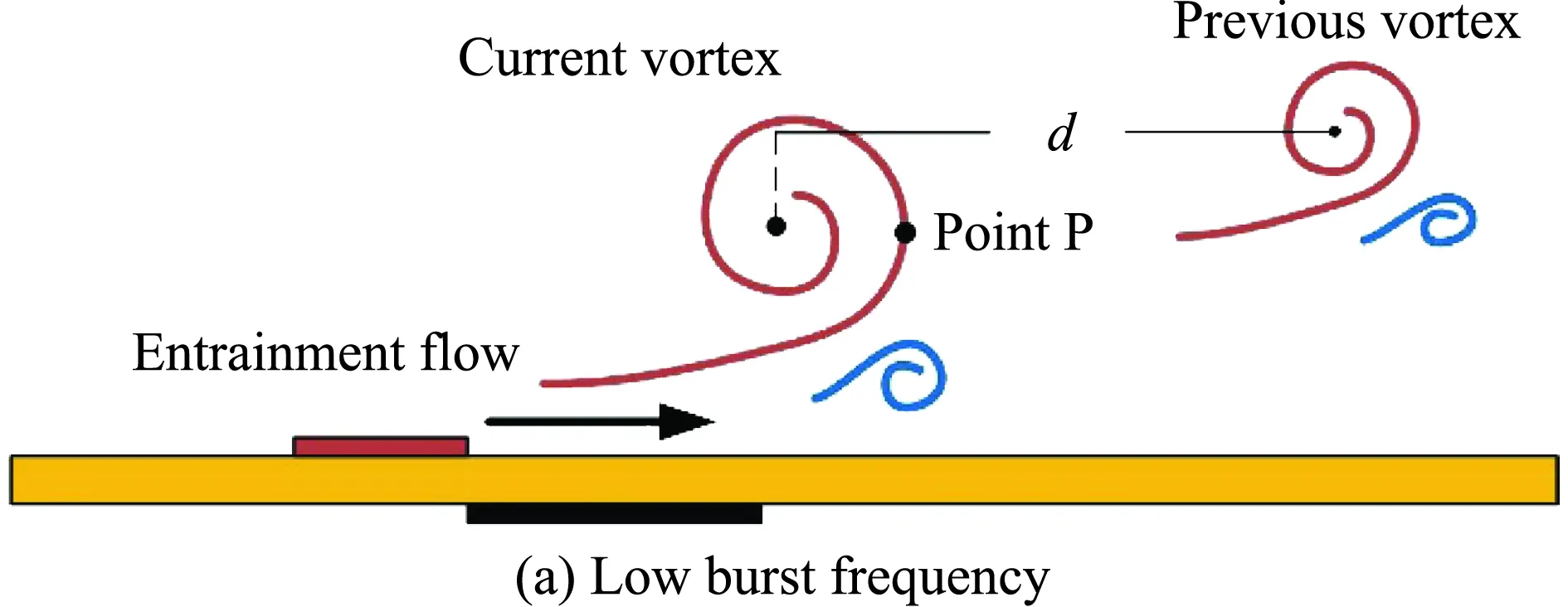
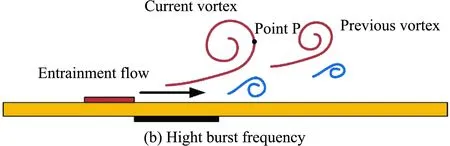
圖12 不同頻率渦相互干擾原理圖Fig.12 Vortex interaction at different burst frequencies
4 結 論
本文采用高頻PIV與高速紋影研究了等離子體DBD誘導渦結構以及脈沖頻率對誘導渦結構以及尺度的影響,得到了以下結論:
1) 誘導渦在放電瞬間后生成,且在其下方形成二次渦,該二次渦伴隨著主渦沿x與y正方向移動。在本文研究脈沖頻率5Hz~50 Hz時,誘導渦沿壁面16°~22°方向移動,且頻率增加,更靠近壁面。
2)f=5 Hz~500 Hz時,單位時間生成的誘導渦個數與脈沖頻率一一對應,且其表現出良好的周期性。
3) 隨著脈沖頻率的增大,誘導渦之間的相互影響更加劇烈,且誘導渦尺度逐漸變小。
