面向任務(wù)的航空數(shù)據(jù)鏈動(dòng)態(tài)組網(wǎng)策略*
2019-03-14 03:37:04張步碩陳柯帆梁曉龍曹芳波
火力與指揮控制 2019年2期
張步碩,呂 娜,陳柯帆,梁曉龍,劉 創(chuàng),曹芳波
(1.空軍工程大學(xué)信息與導(dǎo)航學(xué)院,西安 710077;2.空軍工程大學(xué)空管領(lǐng)航學(xué)院,西安 710051)
0 引言
隨著數(shù)字化戰(zhàn)場(chǎng)的不斷深化,作戰(zhàn)場(chǎng)景、作戰(zhàn)態(tài)勢(shì)、作戰(zhàn)對(duì)象等戰(zhàn)場(chǎng)環(huán)境更加復(fù)雜多變,大規(guī)模航空飛行器群通過(guò)航空數(shù)據(jù)鏈組成航空自組織網(wǎng)絡(luò)協(xié)同執(zhí)行任務(wù)將會(huì)成為未來(lái)航空作戰(zhàn)的主要作戰(zhàn)形態(tài)[1-2]。
大規(guī)模航空飛行器群協(xié)同執(zhí)行多樣化任務(wù),必須依賴對(duì)航空作戰(zhàn)平臺(tái)高效的指揮控制。傳統(tǒng)的指揮控制方式難以滿足較大規(guī)模作戰(zhàn)平臺(tái)協(xié)同需求。隨著人工智能技術(shù)的不斷發(fā)展,智能體技術(shù)逐漸運(yùn)用到了指揮控制系統(tǒng)中[3-4],并隨著信息傳輸技術(shù)的發(fā)展,逐漸呈現(xiàn)出群體化網(wǎng)絡(luò)化的特點(diǎn)[5-6]。智能化的航空作戰(zhàn)平臺(tái)實(shí)現(xiàn)群體智能需要航空數(shù)據(jù)鏈網(wǎng)絡(luò)提供通信支撐。航空作戰(zhàn)平臺(tái)的智能化改變了傳統(tǒng)的信息處理與傳遞機(jī)制,信息交互更加面向具體任務(wù)需求,目前基于智能化航空作戰(zhàn)平臺(tái)的研究主要集中在任務(wù)規(guī)劃與分配等應(yīng)用控制層面[7-8],缺乏對(duì)智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)的詳細(xì)描述。同時(shí),現(xiàn)有航空數(shù)據(jù)鏈網(wǎng)絡(luò)研究基于傳統(tǒng)OSI分層模型,以提升傳輸性能為研究目標(biāo)[9],關(guān)注于更為健壯的網(wǎng)絡(luò)路由,具有更高信道利用率和更加公平的媒體接入控制方式等,網(wǎng)絡(luò)設(shè)計(jì)主要考慮信道利用率、信息傳輸時(shí)延、網(wǎng)絡(luò)吞吐量等通信指標(biāo),缺乏通信網(wǎng)絡(luò)層面與任務(wù)應(yīng)用需求層面的深度耦合,因此,無(wú)法體現(xiàn)對(duì)任務(wù)需求的實(shí)際支撐能力。
為提升現(xiàn)有航空數(shù)據(jù)鏈作戰(zhàn)效能,本文以任務(wù)需求為驅(qū)動(dòng),設(shè)計(jì)了面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),研究了智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)的信息處理與傳遞機(jī)制,并基于所設(shè)計(jì)體系結(jié)構(gòu)提出了一種面向任務(wù)的動(dòng)態(tài)組網(wǎng)策略。
1 網(wǎng)絡(luò)體系結(jié)構(gòu)設(shè)計(jì)
本文設(shè)計(jì)的面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),考慮了航空作戰(zhàn)平臺(tái)實(shí)現(xiàn)群體智能的信息傳輸需求,采用了跨層融合的設(shè)計(jì)思路,描述了智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)信息處理傳遞機(jī)制,下層網(wǎng)絡(luò)行為由上層任務(wù)需求進(jìn)行驅(qū)動(dòng)。通過(guò)智能化航空作戰(zhàn)平臺(tái)間的信息交互與動(dòng)態(tài)組網(wǎng),實(shí)現(xiàn)網(wǎng)絡(luò)構(gòu)建與實(shí)際任務(wù)需求的深度耦合。
如圖1所示,本文設(shè)計(jì)的面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu)分為6個(gè)主要層次,分別是應(yīng)用感知層、信息處理層、智能決策層、網(wǎng)絡(luò)層、鏈路層和物理層。
1.1 體系結(jié)構(gòu)總體描述
比較現(xiàn)有的航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),本文設(shè)計(jì)的面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),在信息處理層和網(wǎng)絡(luò)層之間增加了智能決策層,同時(shí)在網(wǎng)絡(luò)層、鏈路層和物理層分別增加了對(duì)應(yīng)的智能控制模塊,并對(duì)應(yīng)用層(本文稱作應(yīng)用感知層)和信息處理層進(jìn)行了任務(wù)與功能上的擴(kuò)展。

圖1 面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu)
在滿足傳統(tǒng)任務(wù)與功能的基礎(chǔ)上,應(yīng)用感知層能夠利用各類傳感器系統(tǒng)對(duì)外部環(huán)境信息進(jìn)行感知并生成與之對(duì)應(yīng)的各類激勵(lì)信息;信息處理層能夠?qū)?yīng)用感知層各類傳感器系統(tǒng)產(chǎn)生的各類激勵(lì)信息進(jìn)行參數(shù)化和標(biāo)準(zhǔn)化處理,轉(zhuǎn)化為可用于航空智能體自身與航空智能體間各類傳感器交互協(xié)同的交感信息,同時(shí)將交感信息存儲(chǔ)于戰(zhàn)場(chǎng)環(huán)境信息庫(kù)中,以實(shí)現(xiàn)航空智能體對(duì)戰(zhàn)場(chǎng)環(huán)境的信息收集。智能決策層主要通過(guò)接收信息處理層和網(wǎng)絡(luò)層輸入的交感信息,完成對(duì)戰(zhàn)場(chǎng)環(huán)境信息的收集存儲(chǔ),根據(jù)當(dāng)前戰(zhàn)場(chǎng)環(huán)境生成任務(wù)信息,使航空智能體內(nèi)部各執(zhí)行單元,根據(jù)當(dāng)前任務(wù)需求產(chǎn)生相應(yīng)的智能行為。3個(gè)智能控制模塊的主要功能是根據(jù)當(dāng)前任務(wù)需求控制數(shù)據(jù)鏈網(wǎng)絡(luò)的網(wǎng)絡(luò)鏈路構(gòu)建,包括控制通信協(xié)議的選擇、網(wǎng)絡(luò)連接的建立、網(wǎng)絡(luò)資源的分配以及數(shù)據(jù)的傳輸機(jī)制等,使得下層網(wǎng)絡(luò)相關(guān)協(xié)議與參數(shù)能以任務(wù)需求為驅(qū)動(dòng)進(jìn)行調(diào)整。
1.2 信息處理與傳遞機(jī)制

圖2 信息處理與傳遞機(jī)制
利用圖2對(duì)所設(shè)計(jì)體系結(jié)構(gòu)下航空智能體信息處理與傳遞機(jī)制進(jìn)行了詳細(xì)描述。其中,激勵(lì)信息是指航空智能體通過(guò)自身傳感器系統(tǒng)感知外部環(huán)境產(chǎn)生的信息;交感信息是對(duì)各類傳感器系統(tǒng)產(chǎn)生的不同類型激勵(lì)信息進(jìn)行參數(shù)化和標(biāo)準(zhǔn)化處理后產(chǎn)生的,用于單個(gè)航空智能體內(nèi)部和多個(gè)航空智能體之間,相同類型或不同類型傳感器系統(tǒng)間的交互與協(xié)同;任務(wù)信息是由航空智能體利用交感信息與知識(shí)數(shù)據(jù)庫(kù)進(jìn)行匹配映射產(chǎn)生的表征具體任務(wù)類型、任務(wù)需求及任務(wù)相關(guān)關(guān)系的信息。
如圖2所示,對(duì)任意航空智能體存在2路信息輸入,一是利用各類傳感器系統(tǒng)感知外部戰(zhàn)場(chǎng)環(huán)境而產(chǎn)生的激勵(lì)信息輸入,二是利用數(shù)據(jù)鏈通信設(shè)備接收其他航空智能體借助于智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)傳輸?shù)慕桓行畔⒍a(chǎn)生的交感信息輸入。
對(duì)于輸入的激勵(lì)信息,首先經(jīng)過(guò)參數(shù)化和標(biāo)準(zhǔn)化的信息處理,將不同類型傳感器系統(tǒng)產(chǎn)生的激勵(lì)信息轉(zhuǎn)化為交感信息,并將交感信息存入知識(shí)數(shù)據(jù)庫(kù)中的戰(zhàn)場(chǎng)環(huán)境信息庫(kù),以實(shí)現(xiàn)對(duì)當(dāng)前戰(zhàn)場(chǎng)環(huán)境的信息感知。對(duì)于信息輸出,一方面按需將交感信息通過(guò)數(shù)據(jù)鏈網(wǎng)絡(luò)發(fā)送到其他航空智能體,以實(shí)現(xiàn)不同航空智能體間傳感器系統(tǒng)的協(xié)同;另一方面,若戰(zhàn)場(chǎng)環(huán)境信息庫(kù)中的交感信息實(shí)現(xiàn)了與任務(wù)想定模型庫(kù)中相關(guān)任務(wù)模型的匹配映射,則生成任務(wù)信息,并將任務(wù)信息輸入智能行為規(guī)則庫(kù)針對(duì)不同的執(zhí)行單元確定相應(yīng)的行為規(guī)則,使得相應(yīng)的執(zhí)行單元產(chǎn)生合適的智能行為(圖中虛箭頭表示控制驅(qū)動(dòng),實(shí)箭頭表示信息流)。
對(duì)于輸入的交感信息,一方面將通過(guò)航空數(shù)據(jù)鏈網(wǎng)絡(luò)接收的交感信息輸入戰(zhàn)場(chǎng)環(huán)境信息庫(kù),各傳感器系統(tǒng)通過(guò)訪問(wèn)戰(zhàn)場(chǎng)環(huán)境信息庫(kù),提取用于傳感器協(xié)同的交感信息;另一方面同激勵(lì)信息輸入一樣,通過(guò)更新戰(zhàn)場(chǎng)環(huán)境信息庫(kù)促使相關(guān)執(zhí)行單元產(chǎn)生智能行為。
2 面向任務(wù)的動(dòng)態(tài)組網(wǎng)策略
現(xiàn)有的航空數(shù)據(jù)鏈組網(wǎng)方式一般以地理位置為參考,主要考慮網(wǎng)絡(luò)拓?fù)浼s束,將處于相同區(qū)域內(nèi)的作戰(zhàn)平臺(tái)組成一個(gè)子網(wǎng)[10-12]。雖然也有部分組網(wǎng)方式考慮了任務(wù)的需求,但也都基于事先規(guī)劃,無(wú)法針對(duì)突發(fā)任務(wù)進(jìn)行面向任務(wù)的靈活組網(wǎng)[13]。為使網(wǎng)絡(luò)構(gòu)建能支撐航空智能體利用群體智能面向具體任務(wù),本文基于面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),提出了一種面向任務(wù)的動(dòng)態(tài)組網(wǎng)策略。
2.1 相關(guān)定義
依據(jù)FINC(兵力、信息、網(wǎng)絡(luò)與指揮控制)模型[14],本文歸納出決定任務(wù)完成質(zhì)量的3個(gè)要素:
1)布勢(shì)時(shí)間。由航空智能體的任務(wù)協(xié)商時(shí)間與位置部署時(shí)間決定。是任務(wù)準(zhǔn)備階段的主要衡量指標(biāo);
2)協(xié)同系數(shù)。指任務(wù)執(zhí)行者在實(shí)施任務(wù)的過(guò)程中相互之間交互能力資源的能力;
3)任務(wù)執(zhí)行力。由參數(shù)P表示,PT表示對(duì)任務(wù)T的任務(wù)執(zhí)行力。由平臺(tái)能力資源與任務(wù)能力資源需求的匹配程度決定。航空智能體i所具備的能力資源可表示為ak(i),解釋為某一航空智能體具備第k類能力,能力大小為ak(i)。由于航空智能體的類型分工明確,故考慮任意航空智能體僅具備單一能力。任務(wù)能力資源需求可由能力集向量進(jìn)行表征,記為

其中,HT表示任務(wù)T需求的能力資源類型,dHT表示任務(wù)需求的第HT類能力資源大小。
2.2 面向任務(wù)的組網(wǎng)流程
本文所提組網(wǎng)策略是以面向任務(wù)的方式進(jìn)行子網(wǎng)的動(dòng)態(tài)構(gòu)建,實(shí)現(xiàn)網(wǎng)絡(luò)資源面向任務(wù)的有效動(dòng)態(tài)復(fù)用[9]。現(xiàn)將組網(wǎng)流程描述如下:
1)通過(guò)傳感器系統(tǒng)感知外部戰(zhàn)場(chǎng)環(huán)境的航空智能體產(chǎn)生激勵(lì)信息,并將激勵(lì)信息通過(guò)參數(shù)化與標(biāo)準(zhǔn)化的信息處理轉(zhuǎn)化為交感信息輸入知識(shí)數(shù)據(jù)庫(kù);
2)接收到網(wǎng)絡(luò)主節(jié)點(diǎn)廣播的交感信息的航空智能體i,將交感信息輸入知識(shí)數(shù)據(jù)庫(kù)。航空智能體i將發(fā)送該交感信息的航空智能體作為網(wǎng)絡(luò)主節(jié)點(diǎn),若有多個(gè)航空智能體發(fā)送了相同交感信息,則選擇平臺(tái)號(hào)最小的航空智能體作為網(wǎng)路主節(jié)點(diǎn),并執(zhí)行步驟3);
3)航空智能體i判斷自身是否正在執(zhí)行任務(wù),否則執(zhí)行步驟4);是則判斷新任務(wù)優(yōu)先級(jí)是否高于當(dāng)前正在執(zhí)行任務(wù),若不高則放棄進(jìn)行新任務(wù)入網(wǎng)申請(qǐng),繼續(xù)執(zhí)行當(dāng)前任務(wù),否則執(zhí)行步驟4)。
4)航空智能體i利用知識(shí)數(shù)據(jù)庫(kù)獲取自身能力資源ak(i),若k?AT,即自身不具備任務(wù)所需求的能力類型,則放棄入網(wǎng);若k∈AT則執(zhí)行步驟5)。
5)航空智能體i判斷是否能在閾值時(shí)間內(nèi)到達(dá)指定任務(wù)執(zhí)行區(qū)域,到達(dá)任務(wù)執(zhí)行區(qū)域時(shí)間可由交感信息,主節(jié)點(diǎn)位置信息與航空智能體i自身位置信息確定。假設(shè)任務(wù)執(zhí)行區(qū)域?yàn)榘霃絛的圓形區(qū)域,圓心坐標(biāo)為(xT,yT),到達(dá)時(shí)間可由下式進(jìn)行計(jì)算:

其中,(xi,yi)表示航空平臺(tái)i當(dāng)前坐標(biāo),v表示航空平臺(tái)飛行速度。若 tarrive>tT,則放棄入網(wǎng);若 tarrive<tT,則執(zhí)行步驟6);
6)航空智能體i向網(wǎng)絡(luò)主節(jié)點(diǎn)發(fā)送入網(wǎng)申請(qǐng)、自身能力資源情況ak(i)與到達(dá)任務(wù)執(zhí)行區(qū)域的時(shí)間tarrive;
7)網(wǎng)絡(luò)主節(jié)點(diǎn)確定當(dāng)前任務(wù)屬性,并且依據(jù)任務(wù)屬性和表1確定優(yōu)化順序,在所得入網(wǎng)申請(qǐng)者組合中求出當(dāng)所有能力類型為k的航空智能體到達(dá)任務(wù)執(zhí)行區(qū)域時(shí),到達(dá)時(shí)間最短的組合;
8)網(wǎng)絡(luò)主節(jié)點(diǎn)將選擇結(jié)果通過(guò)廣播的方式發(fā)送到其他航空智能體;
9)發(fā)送入網(wǎng)申請(qǐng)的航空智能體接收到網(wǎng)絡(luò)主節(jié)點(diǎn)的選擇結(jié)果后,判斷自身是否為網(wǎng)絡(luò)成員,是則完成入網(wǎng)開(kāi)始執(zhí)行任務(wù),否則放棄入網(wǎng)。
2.3 組網(wǎng)策略合理性分析
對(duì)于布勢(shì)時(shí)間,計(jì)算到布勢(shì)時(shí)間大于任務(wù)要求的航空智能體將不會(huì)進(jìn)行入網(wǎng)申請(qǐng),保證了參與執(zhí)行任務(wù)的航空智能體都能在任務(wù)要求時(shí)間內(nèi)完成作戰(zhàn)布勢(shì)。
對(duì)于協(xié)同系數(shù),影響參數(shù)分別為任務(wù)執(zhí)行者數(shù)量以及任務(wù)執(zhí)行者相互之間的距離。nk表示參與任務(wù)執(zhí)行的能力類型為k的航空智能體數(shù)量。提高協(xié)同系數(shù)可考慮減小nk以及nk個(gè)航空智能體間的平均傳輸距離,但由于航空智能體具有較高機(jī)動(dòng)性,相互之間距離不能保證;同時(shí)只有當(dāng)nk≥5減小nk個(gè)航空智能體間平均距離才可能達(dá)到與減少nk相同的性能,條件較為苛刻,證明如下:



可以推得nk≥5。
對(duì)于有效執(zhí)行力指標(biāo),通過(guò)在滿足任務(wù)需求的航空智能體中選擇能力資源和最小的組合,可實(shí)現(xiàn)有效執(zhí)行力的最大化。
3 仿真分析
利用EXata網(wǎng)絡(luò)仿真軟件對(duì)所設(shè)計(jì)的面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu)下的組網(wǎng)策略進(jìn)行仿真分析驗(yàn)證。
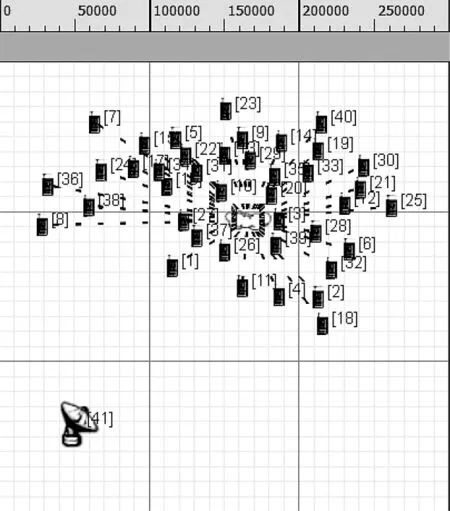
圖3 網(wǎng)絡(luò)仿真場(chǎng)景
假設(shè)在300 km×300 km的范圍內(nèi)存在一個(gè)由40個(gè)航空智能體組成的飛行器群,任意航空智能體采用TDMA的信道接入方式進(jìn)行信息的交互,且最大飛行速度為1 MHz。各航空智能體具備的能力類型與能力資源大小如下頁(yè)表1所示。
令41號(hào)節(jié)點(diǎn)持續(xù)廣播消息,傳輸范圍為150km。假設(shè)任意航空智能體若接收到41號(hào)節(jié)點(diǎn)發(fā)送的消息則將其視為戰(zhàn)場(chǎng)環(huán)境改變,對(duì)應(yīng)于一個(gè)任務(wù)屬性為1,任務(wù)資源需求為表2的任務(wù)想定(仿真場(chǎng)景只考慮了存在一個(gè)任務(wù)的情況),任務(wù)規(guī)定作戰(zhàn)區(qū)域?yàn)閳A心坐標(biāo)為(100 km,100 km),半徑為80 km的圓形區(qū)域。
仿真結(jié)果如下:
任務(wù)主節(jié)點(diǎn)選擇為1號(hào)節(jié)點(diǎn),各能力類型的網(wǎng)絡(luò)成員分別為:
能力類型 1:2、3、8;能力類型 2:9、10、11、12;能力類型 3:22、23、24;能力類型 4:27、28、31;能力類型 5:36、37。

表1 航空智能體能力類型與能力資源大小
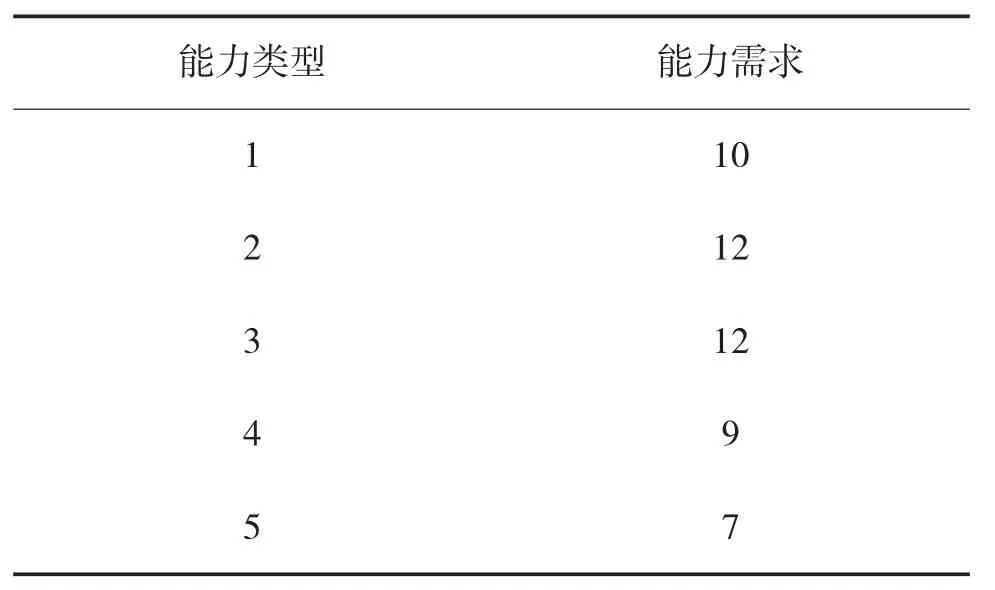
表2 任務(wù)需求
圖4為網(wǎng)絡(luò)成員提供的能力資源大小與任務(wù)能力資源需求的比較。可以看出,網(wǎng)絡(luò)成員提供的各能力類型資源大于等于任務(wù)對(duì)各能力類型資源需求,保證了任務(wù)的可執(zhí)行。
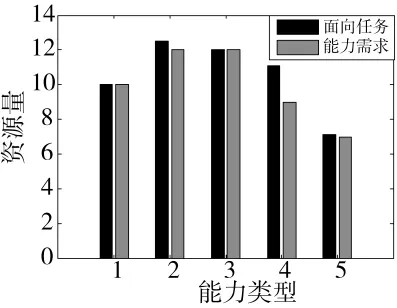
圖4 網(wǎng)絡(luò)能力大小與能力需求比較
將所得組網(wǎng)結(jié)果與滿足任務(wù)能力資源需求的隨機(jī)組網(wǎng)方式進(jìn)行比較分析,結(jié)果如圖5所示。

圖5 協(xié)同系數(shù)比較
由圖5可以看出,對(duì)于任務(wù)屬性為1的任務(wù)想定,面向任務(wù)的組網(wǎng)策略使得任意相同能力類型航空智能體間的協(xié)同系數(shù)遠(yuǎn)高于隨機(jī)組網(wǎng)的方式。
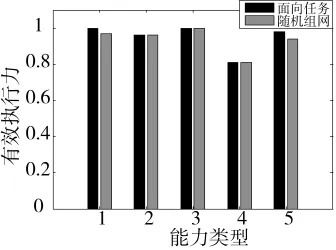
圖6 有效執(zhí)行力比較
圖6為面向任務(wù)的組網(wǎng)方式與隨機(jī)組網(wǎng)方式在相同協(xié)同系數(shù)的前提下,不同能力類型航空智能體有效執(zhí)行力的比較。可以看出面向任務(wù)的組網(wǎng)方式使得能力類型為1和5的航空智能體的有效執(zhí)行力高于隨機(jī)組網(wǎng)方式,而能力類型2、3、4的有效執(zhí)行力與隨機(jī)組網(wǎng)方式相同的主要原因是對(duì)于任務(wù)屬性為1的任務(wù)想定,優(yōu)先考慮了協(xié)同系數(shù)指標(biāo),使得有效執(zhí)行力指標(biāo)弱化,但依然可以看出面向任務(wù)的組網(wǎng)方式,在有效執(zhí)行力指標(biāo)上優(yōu)于隨機(jī)組網(wǎng)方式,提升了航空智能體在執(zhí)行任務(wù)過(guò)程中的有效執(zhí)行力。
4 結(jié)論
本文基于現(xiàn)有航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),結(jié)合未來(lái)戰(zhàn)場(chǎng)需求,設(shè)計(jì)了面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu),分析總結(jié)了其信息類型與信息處理傳遞機(jī)制。同時(shí),基于所設(shè)計(jì)網(wǎng)絡(luò)體系結(jié)構(gòu),提出了一種面向任務(wù)的動(dòng)態(tài)組網(wǎng)策略。通過(guò)組網(wǎng)實(shí)例分析,說(shuō)明了在面向任務(wù)的智能化航空數(shù)據(jù)鏈網(wǎng)絡(luò)體系結(jié)構(gòu)下所提組網(wǎng)策略對(duì)實(shí)際任務(wù)需求的有效支撐能力。
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
人大建設(shè)(2018年6期)2018-08-16 07:23:10
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
中華手工(2017年2期)2017-06-06 23:00:31
小星星·閱讀100分(低年級(jí))(2015年10期)2015-10-22 08:30:04
中外會(huì)展(2014年4期)2014-11-27 07:46:46
