集裝箱碼頭鎖銷自動化拆裝視覺定位系統研究
2019-03-13 02:06:28
港口裝卸 2019年1期
上海國際港務(集團)股份有限公司尚東集裝箱碼頭分公司
1 引言
自動定位技術廣泛運用于工業領域的各個環節。在工業自動化生產中,需要迅速精準地對零部件進行加工和安裝,其中部分生產環節已經實現了自動定位,但是仍然有一些環節需要人工進行定位,一定程度上制約了自動化生產的效率。隨著科技的發展,市場及用戶對產品的精密程度和質量的要求越來越高,傳統的定位方法已經不能滿足需求,視覺定位技術應運而生[1]。
視覺定位系統是通過計算機模擬人的視覺功能,實現實際的檢測和控制。圖像傳感器是視覺定位系統中的主要裝置,分為互補金屬氧化物半導體(CMOS)和電荷耦合器件(CCD)兩大類,可以把被采集物的圖像信息傳遞給圖像處理系統,圖像處理系統再將其中的亮度、對比度、像素分布等特征信息轉化成數字信號,并生成相應的控制指令[2]。
視覺定位系統效果的好壞與圖像質量的高低成正比,大多數情況下,視覺定位系統處理效果差,多是圖像質量低、特征信息模糊導致的。為了采集到高質量、特征信息明顯的可處理圖像,需要亮度、對比度以及魯棒性都較好的光源[3]。
視覺定位系統中,好的光源需具備合適的亮度、足夠大的對比度以及較高的魯棒性,這一方面可以保證攝像頭能夠清晰地拍攝圖像,另一方面能夠使需要處理的圖像特征信息變得明顯。具體的光源選取還在于現場的實驗調試。
2 鎖銷自動拆裝系統的工作流程
鎖銷的視覺定位系統在鎖銷自動拆裝系統中發揮著重要作用,可以為鎖銷拆裝提供左右、前后、高低3個方向的位置信號,主要由激光測距和視覺定位2個部分構成。激光測距負責測量鎖銷左右方向的位置,前后和高低方向的位置檢測由視覺定位系統實現(見圖1)。相機鏡頭內目標物包括集裝箱鎖孔和鎖銷(見圖2)。
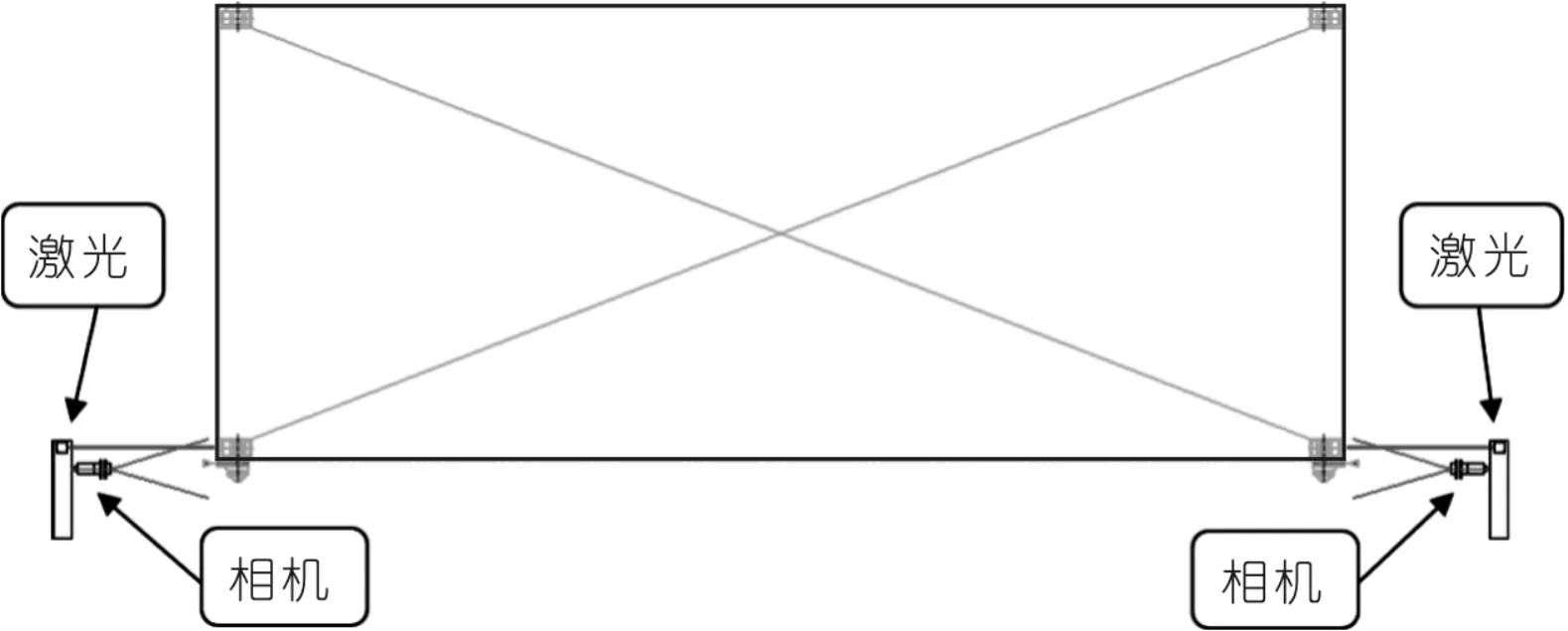
圖1 激光和相機布置示意圖
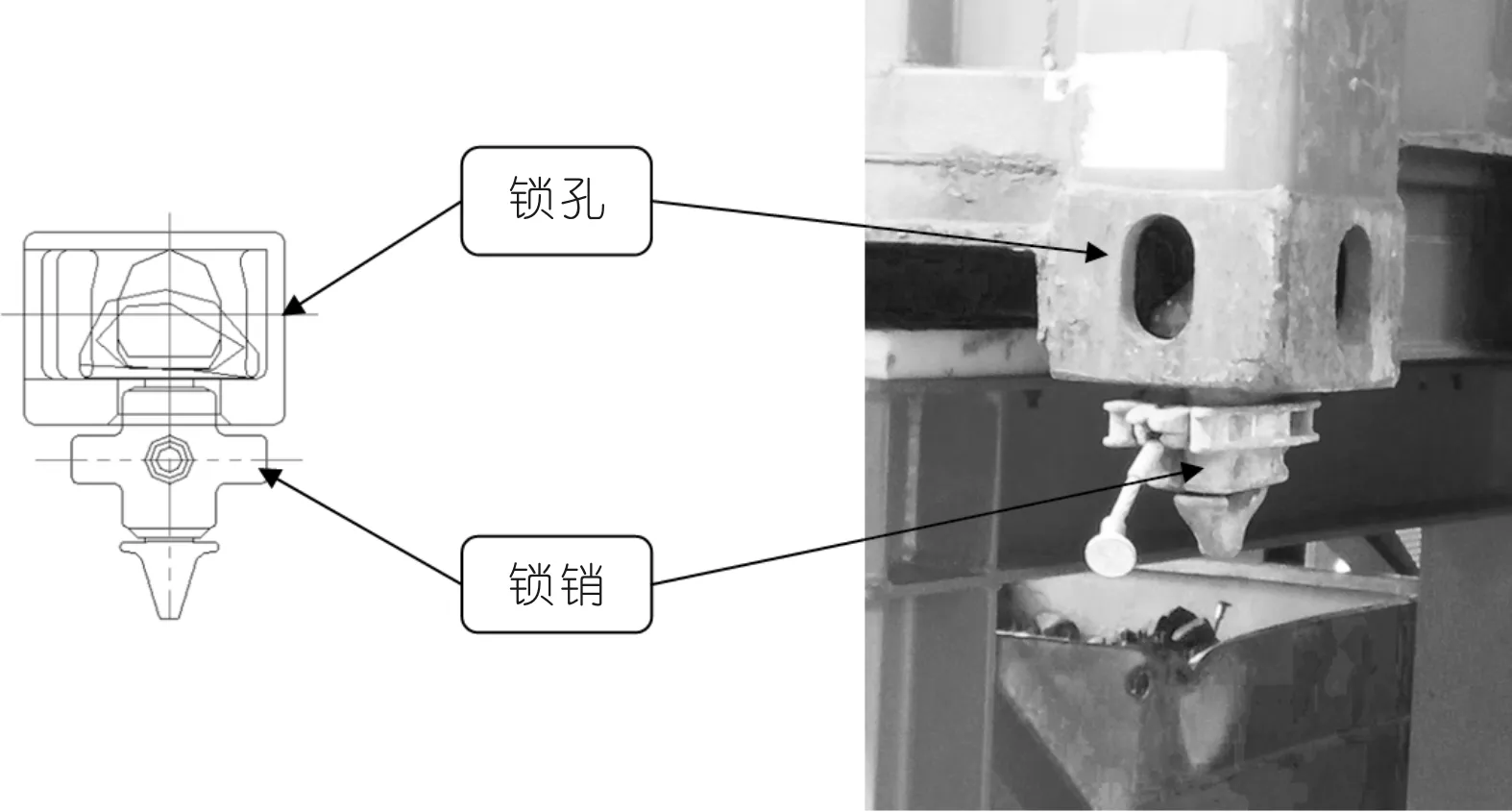
圖2 相機鏡頭內目標物
2.1 拆鎖工作流程
吊具將需要拆卸鎖銷的集裝箱放置在擱架上,定位系統確認有需要拆卸的鎖銷時,要對鎖銷位置進行檢測,以便機器人拆卸鎖銷。其中,激光檢測左右方向位置,相機定位檢測前后和高低方向,以及鎖銷的存在與否。拆鎖機構根據定位系統提供的位置信息,到達對應的位置,完成鎖銷的拆卸,并將鎖銷放置在相應的存放點。視覺檢測確定鎖銷拆除,集裝箱被吊運走,重復下一循環。
2.2 裝鎖工作流程
吊具將需要安裝鎖銷的集裝箱放置在擱架上,定位系統確認需要安裝鎖銷的位置沒有鎖銷,并對安裝目標位置進行檢測,以便機器人安裝鎖銷。裝鎖機構從鎖銷存放點取出鎖銷,根據定位系統提供的位置信息,到達對應的位置,完成集裝箱鎖銷的安裝。視覺檢測確定鎖銷安裝到位,集裝箱被吊運走,重復下一循環。
3視覺定位系統的選擇
3.1 夾具
洋山深水港四期全自動化碼頭鎖銷拆裝系統中,拆裝機器人采用專門研發的夾具系統,使用氣動控制,實現多種夾具的自動切換與應用,可以適應各種箱型,滿足市場80%的鎖頭拆裝需求。針對碼頭作業現場環境復雜、震動大等特點,夾具部分加入了浮動系統,在抓取過程中,夾具處于柔性狀態,可以有效避免抓空的情況。另外獨特的夾具快換裝置可以在面對多種鎖頭時,及時更換需要的夾具,實現夾具更換的自動化。
3.2 傳動裝置
采用獨立研發的皮帶機系統作為傳動裝置,通過伺服控制精確定位,將鎖銷盒送達指定位置,等待機械手臂將拆下的鎖頭放置在盒子內,再由程序控制將鎖頭運送到指定的框內存儲,實現自動化生產。
3.3 激光測距
集裝箱左右兩側分別布置了激光測距限位,實時監測箱子放置過程中的偏差,通過運算傳遞給機械手臂,實現每個集裝箱的精準定位。
3.4 視覺檢測
視覺檢測方面,目前有單目視覺系統和雙目視覺系統可以選擇。
(1)單目視覺系統。單目視覺系統具有設備裝置簡單、安裝維護便捷、適用性好等特點。其視覺定位只需1臺相機即可完成,不存在雙目視覺系統中2臺相機特征點和距離選取的問題,可以很好地完成目標位置標定、機械手臂監測等工作,已經逐漸運用在工業領域的各個方面[4]。
單目視覺系統定位分為單幀和多幀,針對碼頭鎖銷的情況,選擇多幀定位進行討論。多幀定位是指相機在移動過程中采集同一環境下不同時間點的多幀圖像,通過被采集圖像之間的像素位置差來進行定位。其中,關鍵是進行圖像間的對應特征信息匹配和比對處理。
雙幀定位中,往往利用提前標定好的相機在移動過程中進行圖像采集,由雙幀圖像之間的投影計算出匹配點對應的基本矩陣,然后根據本質矩陣和基本矩陣的換算關系計算出本質矩陣,分析得到單目相機的旋轉和平移參數,最后轉換坐標系得到目標物的三維特征信息。對比立體視覺定位方法,可以對基本矩陣進行迭代運算,并根據RANSAC算法進行魯棒性評估,獲取相機移動的距離和圖像投影之間的8對匹配點,同時采集多份周圍環境的特征信息,這樣可以有效提高定位精度,但是局限性也會明顯變大[5]。尺度不變特征變換算法(SIFT)可以實現尺度和旋轉的不變性,不存在采集到的圖像對應點匹配問題。不過該算法同樣需要先采集圖像特征信息,然后計算出三維特征信息,且其采集圖像的頻率較低,不適用于需要相機快速移動的設備[6-7]。
此外,可以利用圖像之間的灰度信息拼接技術匹配圖像。相機進行多次平移和旋轉,采集具有多個匹配特征點的圖像,通過對比特征點的變化實現相機定位。其中,拼接技術的關鍵是通過相機平移和旋轉的仿射變換推算出圖像之間的特征點變化關系。實驗證明,該方法可基本實現相機定位,但實際應用中,往往無法獲取相機光心和目標物之間的距離,只能計算得出相機的運動方向和相機的旋轉角度,無法計算出相機準確的位移量[8]。
(2)雙目視覺系統。雙目視覺系統屬于立體視覺,是基于視差原理進行三維信息的測量,如圖3所示,相機的焦距為f,2臺相機投影中心的連線距離為基線距B。
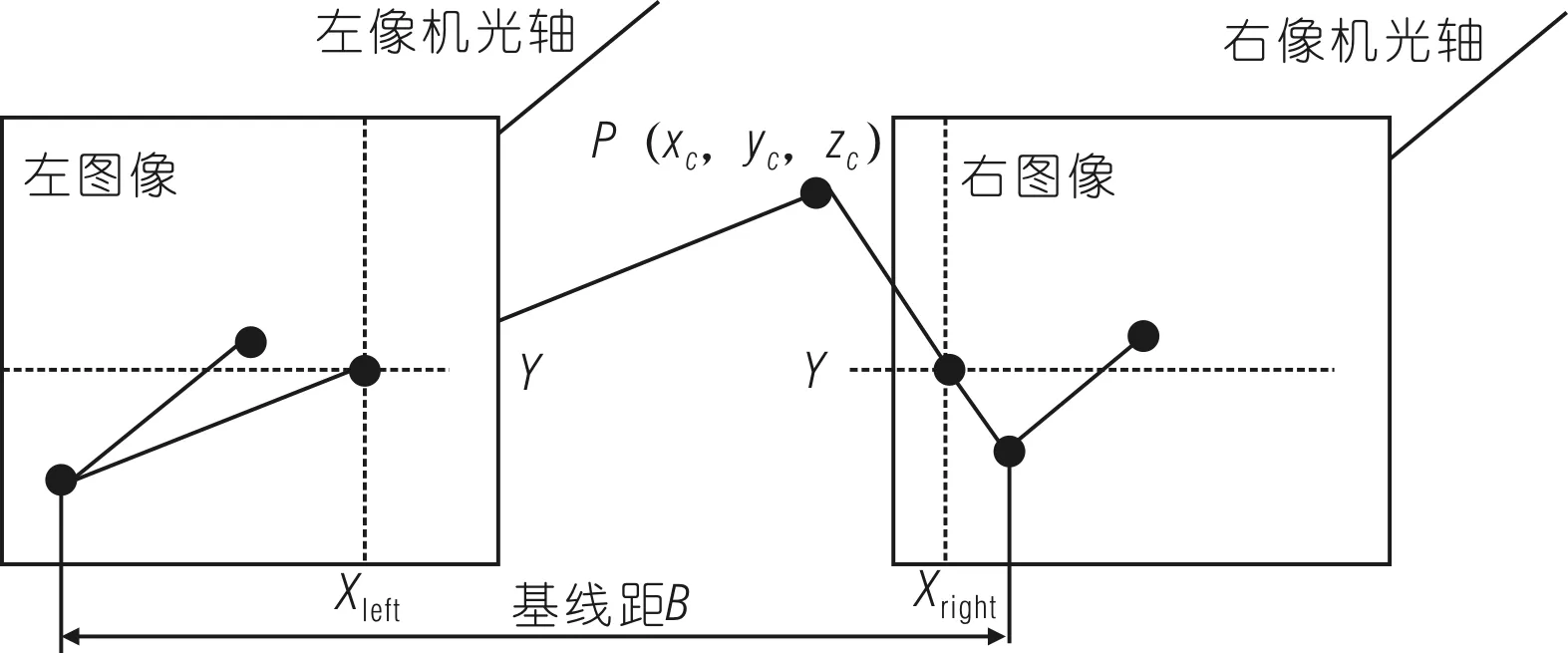
圖3 雙目視覺系統原理圖
假設2臺相機分別布置在目標物偏左和偏右的2個方向上,在同一時間點對物體的特征點P(xc,yc,zc)進行采集,各自采集到包含點P的圖像。設2臺相機采集到的特征點P坐標分別為Pleft=(Xleft,Yleft),Pright=(Xright,Yright)。
因為2臺相機所采集的圖像屬于同一平面,故特征點P的坐標Y坐標應相同,即Yleft=Yright=Y,由三角幾何關系可以得出:
(1)
則2臺相機視差為:Disparity=Xleft-Xright。由此得到出特征點P在相機坐標系下的三維坐標為:
(2)
因此,對于右側相機圖像平面上的任意一點,只需在左側相機圖像平面上找到對應的匹配點,就能夠確定其三維坐標。該方法是單純的點對點運算,對于圖像平面上所有的點,只需要找到2臺相機上對應的1對匹配點,就能夠由該方法計算出其三維坐標[9]。
雙目視覺系統的工作步驟如下:
(1)圖像采集。雙臺相機布置在同一直線上或者同一平面上或者成三維立體分布,進行圖像采集。
(2)相機標定。推算特征點在相機坐標系和空間坐標系中的轉換關系,涉及到相機內部的幾何和光學參數。
(3)圖像預處理和特征提取。圖像預處理主要是進行圖像亮度和對比度的調整,以及信噪比的增大;特征提取主要包括點狀特征、線狀特征和區域特征提取。
(4)三維坐標確定。通過對特征點的計算,建立不同圖像平面中特征點的對應關系,確定特征點的三維坐標。主要包括4個步驟:①在2個圖像平面中任選一個圖像平面,選擇某一需要被觀察的特征點;②在另外一個圖像平面中確定該特征點的對應位置坐標;③對比2個圖像平面上特征點的坐標,計算得出視差;④確定該特征點的三維坐標。
(5)恢復三維場景信息。在計算出特征點的三維坐標后,進行圖像深度確定,恢復實際三維場景信息。
4 結語
視覺定位系統的選擇需滿足對目標物(鎖銷)的位置進行判斷和測量的精度要求,能夠提供準確的信息,以便完成鎖銷的拆卸和安裝工作。視覺定位系統的選擇應具備對鎖銷的種類進行辨別的功能,保證鎖銷和夾具的匹配,避免外界提供鎖銷種類信息錯誤而損壞夾具,并且對鎖銷種類的辨別功能還應具有擴展性,以便適應新的鎖銷種類。具體使用單目視覺系統還是雙目視覺系統,需要結合碼頭現場的實際情況做進一步的選擇研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年23期)2014-02-27 14:19:15
