洋山深水港四期懸臂箱區的基本定義和管控規則
2019-03-13 02:06:28
港口裝卸 2019年1期
上海國際港務(集團)股份有限公司尚東集裝箱碼頭分公司
1 引言
根據水-水中轉比例和堆場容量需求,洋山深水港四期碼頭自動化堆場間隔布置了10對懸臂箱區,其中西側最端部的一塊懸臂箱區,采用雙懸臂軌道吊作業。懸臂箱區穩定、可靠、高效的運行,對洋山深水港四期自動化碼頭堆場作業非常重要。為了提高中轉比例高的大型自動化集裝箱碼頭的適應性,在分析了現有自動化碼頭典型堆場布置基礎上,何繼紅[1]等提出了無懸臂、單懸臂和雙懸臂3種型式軌道吊在自動化堆場混合應用的方案。現有的超聲波測距技術在軌道吊防撞功能中的應用,以及其他的一些控制技術,雖然部分解決了軌道吊的防撞問題,但未能有效解決同一箱區2臺軌道吊作業的協同性。另外,全球已經在運營的其他主要集裝箱自動化碼頭,還沒有使用過類似的懸臂、無懸臂箱區間隔布置的設計,在系統設置、箱區的基本定義和管控規則等方面,沒有現成的經驗可供參考和借鑒。目前在洋山深水港四期全自動化集裝箱碼頭,成功實踐了無懸臂、單懸臂和雙懸臂3種型式軌道吊在自動化堆場混合應用的方案,設備和系統穩定。本文結合洋山深水港四期項目實例,分析和總結了懸臂箱區的基本定義和管控規則,為其他集裝箱自動化碼頭提供參考。
2 懸臂箱區的基本情況
根據洋山深水港四期工程全自動化集裝箱碼頭總體設計[2],自動化堆場布置有20塊懸臂箱區,其中雙懸臂箱區1塊,單懸臂箱區19塊,單懸臂吊箱區中有6塊區域靠近陸側位置帶有冷藏箱位。懸臂箱區的布置兩兩成對,中間留有供AGV (Automated Guided Vehicle,集裝箱自動導引運輸車)穿行的21 m通道。
普通單懸臂箱區13塊,懸臂側用于與AGV的直接交互作業,可堆放普通20 ft、40 ft、45 ft集裝箱,其中45 ft箱僅有最大和最小2個貝位可以堆放。
6塊帶有冷藏箱位的單懸臂箱區,除具備普通單懸臂箱區的功能外,在靠近陸側的部分貝位安裝有7列冷藏箱支架,可堆放冷藏集裝箱,7列冷藏箱旁邊還有3列位置可堆放普通45 ft集裝箱。
雙懸臂箱區1塊,其中AGV通道側的作業模式與普通單懸臂箱區相同,懸臂的另一側是集卡交互側,主要用于危險品的轉運作業、港區互拖箱作業。
每一塊懸臂箱區的陸側,都配有2條集卡作業車道,主要用于外集卡的進提箱作業。懸臂箱區與AGV的交互作業,主要在21 m通道進行。
懸臂箱區的作業特點為:AGV可以通過懸臂箱區21 m通道進入堆場與軌道吊交互作業;對同一貝位作業時,軌道吊的大車原則上不作移動,而主要由AGV來完成水平移動;AGV與軌道吊之間的作業交互點不固定,集裝箱水平運輸任務主要由AGV完成,軌道吊僅負責堆垛和裝卸作業,效率較高,對箱區的長度也不敏感;2臺軌道吊能同時對AGV作業,為岸橋服務[1]。
3 懸臂箱區貝位及作業交互點的定義
3.1 懸臂箱區貝位及懸臂側AGV的作業交互點
從海側開始,20 ft箱貝位用奇數(01、03、05……)表示;相鄰的2個20 ft箱貝位可以組合成1個40 ft(或45 ft)箱貝位,用偶數(02、04、06……)表示。懸臂箱區懸臂側與AGV的作業交互點的定義規則為:箱區號+作業區域標示+AGV停車貝位+AGV工作位,譬如:38CW0182中,38代表箱區號,CW代表作業區域標示,018代表AGV停車貝位,2代表工作位(見圖1)。作業區域標示有CW和CE兩個代碼,CW表示懸臂在箱區的西側,CE表示懸臂在箱區的東側。AGV工作位有3個數值表示,1表示20 ft箱放AGV海側,2表示40 ft/45 ft箱放AGV中間,3表示20 ft箱放AGV陸側。

圖1 洋山深水港四期懸臂箱區貝位及作業交互點定義
3.2 懸臂冷藏箱區貝位及作業交互點
懸臂冷藏箱區冷藏箱貝位的定義從300開始,每個箱區有10個冷藏貝位,其中20 ft貝位2個( 301、305),40 ft貝位8個( 310、314、……338),冷藏箱位布置在靠近懸臂吊電氣房側,每個貝位7列。冷藏箱位旁邊的另外3列,用于堆放普通45 ft集裝箱,貝位的定義與普通懸臂箱區的規則相同。冷藏箱以及旁邊普通45 ft箱貝位,與AGV交互點的定義規則,與普通懸臂箱區相同,沿用“箱區號+作業區域標示+AGV停車貝位+AGV工作位”的模式。譬如:47CE3061中,47代表箱區號,CE代表作業區域標示,306代表AGV停車貝位,1代表AGV工作位(見圖2)。
3.3 懸臂箱區陸側集卡作業交互點
懸臂箱區陸側與集卡的作業交互點的定義規則為:箱區號+LSC+車道號+集卡工作位。譬如:38LSC12中,38代表箱區號,1代表車道號,2代表集卡工作位。每塊懸臂箱區,陸側有2條車道。靠近21 m通道的為1號車道,另一條為2號車道。集卡工作位有4個數值表示,1表示20 ft箱放集卡后部,2表示40 ft/45 ft箱放集卡上,3表示20 ft箱放集卡前部,5表示20 ft箱放集卡中部(見圖3)。

圖2 洋山深水港四期懸臂箱區冷藏貝位、及作業交互點的定義
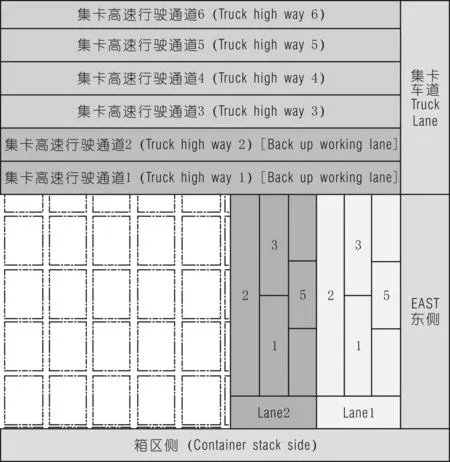
圖3 洋山深水港四期懸臂箱區陸側集卡作業交互點的定義
3.4 雙懸臂箱區懸臂集卡側作業交互點
雙懸臂箱區懸臂集卡側作業交互點的定義規則為:箱區號+作業區域標示+AGV停車貝位+AGV工作位。譬如:61CW0182中,61代表箱區號,CW代表作業區域標示,018代表AGV停車貝位,2代表工作位。作業區域標示有CW和CE兩個代碼,CW表示懸臂在箱區的西側,CE表示懸臂在箱區的東側。AGV工作位有4個數值表示,1表示20 ft箱放集卡海側,2表示40 ft/45 ft箱放集卡,3表示20 ft箱放集卡陸側,5表示20 ft箱放集卡中間。
4 同一箱區兩臺懸臂吊之間的防撞和避讓管控
布置在同一懸臂箱區的2臺懸臂吊,各自的作業區域幾乎都能覆蓋整個箱區,經常需要在臨近的區域或者重疊的區域交替作業。2臺懸臂吊之間完善的防撞和避讓管控,對實現懸臂箱區安全、高效的作業,也非常關鍵。
4.1 防撞
洋山深水港四期懸臂吊的大車定位,是基于安裝在大車兩側地面的固定板(FLAG板)和安裝在大車上的編碼器,通過固定的FLAG板來校準大車的絕對位置,從而達到對兩側大車的精確定位和控制。2臺懸臂吊都處于自動運行狀態下時,最小安全間距為35 m;一臺處于維修狀態、另一臺處于作業狀態時,最小安全間距為26 m。
每臺懸臂吊都有向海側、向陸側、停止3種運行工況,2臺懸臂吊共有9種運行工況組合,每種組合下2臺車都可以運行在各自不同的速度。防撞的基本邏輯,主要就是根據2臺懸臂吊已知的當前位置和運行工況組合,來決定防撞策略,協同2臺懸臂吊安全、高效地開展作業(見表1)。
洋山深水港四期懸臂吊的大車門腿位置,還安裝有1套激光測距儀,用于實時測量2臺懸臂吊之間的相對距離,用于大車防撞。尤其是在一臺懸臂吊通訊丟失,系統無法獲知其大車確切位置的情況下,也能有效起到防撞保護作用。

表1 懸臂箱區大車運行工況組合
4.2 避讓
同一箱區作業區域重疊的情況下,需要合理地避讓管控,才能更好地協同2臺懸臂吊的作業,洋山深水港四期懸臂吊的避讓控制是由Crane Director(以下簡稱CD)層面來實現。CD從上層系統獲取作業指令和堆場狀態信息,從底層獲取設備狀態信息,CD之間還通過通訊獲取另一臺設備的指令和狀態信息,根據對全局任務的判斷,綜合考慮避讓產生的時間影響、效率和能耗等因素,運用程序邏輯判斷給出合理的避讓策略。洋山深水港四期懸臂吊避讓的基本規則如下:
(1)懸臂吊對于每條作業指令的運行范圍都進行3次判斷,分別是:接收到指令時、抓箱完成時、另一臺懸臂吊接收到指令時。
(2)每一條作業指令都設置優先級,優先級高的懸臂吊具有優先權。
(3)懸臂吊停止抓箱的條件:接收到另一臺懸臂吊有一條更高級別指令的信息;2條指令的運行范圍有重疊;懸臂吊未到達抓箱位置范圍之內。
(4)不受優先級的限制情況:其中一臺懸臂吊正在執行指令,而另一臺懸臂吊要求其移出交換區域,此時不受優先級限制。后一個接收到指令的懸臂吊,會等前一個懸臂吊完成它的指令后,再進行作業。
(5)放箱指令懸臂吊的優先級,高于抓箱指令的懸臂吊。
(6)優先級相等時,運行范圍先申請者優先。
洋山深水港四期懸臂吊避讓的主要場景有:2臺懸臂吊的指令互不干涉;抓箱前高級別指令占領運行區域;高級別指令占領抓箱已被允許的區域;相同優先級情況下優先完成抓箱的占領區域;指令優先級相同放箱優先級高于抓箱;低優先級的讓高優先級的占領整個作業區域;高優先級占領作業區域;抓箱完成后高優先級占領作業區域;同等優先級的軌道吊帶載的先占領作業區域;抓箱之前高優先級的軌道吊占領作業區域;低優先級懸臂吊等待;兩臺軌道吊抓箱位置區域均安全,低優先級的等待放箱;低優先級的懸臂吊已在執行指令,則不受優先級控制。
5 懸臂箱區21 m通道的管控
5.1 懸臂箱區的車道布置
(1)懸臂箱區之間的通道寬度為21 m,在該通道中布置了4根車道,寬度均為4 m,邊側車道的邊界線與軌道中心間距為2.5 m。
(2)從左至右4 根車道依次為:作業車道、通行車道、通行車道、作業車道。AGV 通過通行車道,進出 21 m通道。AGV 通過斜行的方式,在通行車道與作業車道間轉移。
(3)從左至右4根車道的流向依次為:雙向、單向向海側、單向向陸側、雙向。中間2根通行車道,允許短距離逆行。
5.2 固定停車位
每塊懸臂箱區的作業車道上,設計有若干個作業車道固定停車位。AGV在進入作業位作業前,在作業車道固定停車位等待。固定停車位的間距為32.5 m(5個20 ft箱貝位的長度,見圖4)。
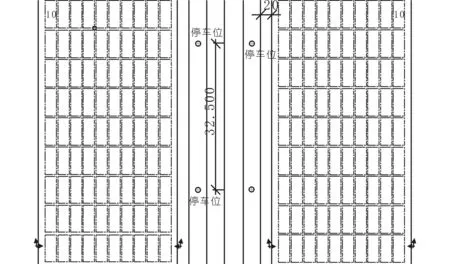
圖4 洋山深水港四期懸臂箱區通道固定停車位的布置
固定停車位的分配,以堆場所有的 AGV 作為一個整體,統一計算和優化調整。輸入參數包括:
(1)AGV 任務。包括AGVID、JOBID、目標作業位、作業箱號及類型、AGV 上箱子姿態 (箱子在 AGV 上的位置)、車頭方向等。
(2)各堆場中目前給出的 AGV 任務間的優先級關系。分配的目標為最高優先級的AGV能最快到達目標作業位。為此,AGV的停車位與目標作業位盡可能近,同時盡量避免干擾高優先級的AGV作業。每當一個完成作業的AGV離開作業位后,會重新調整停車位,并為最高優先級的AGV規劃路徑以進入作業位。
如圖5所示,4輛AGV優先級自高至低依次為AGV1,AGV2,AGV3,AGV4。作業位均在圖中T1處,對應56貝位。AGV1 分配到最近的停車位 P1,并行駛至 T1 作業。AGV2分配至停車位P2,不影 響 AGV1 的作業。AGV3與AGV4 分別分配到停車位P3與P0。AGV1作業完成后,重新分配作業位。AGV2停車位P1,并行駛至T1 作業。AGV3分配至停車位P2,不影響AGV1的作業, 亦行駛至P2。AGV4仍分配到停車位P0。新的AGV任務加入序列時,可以臨時分配一個不影響現作業的停車位。例如,可以將新的AGV分配P3停車位,重新計劃時再做調整。
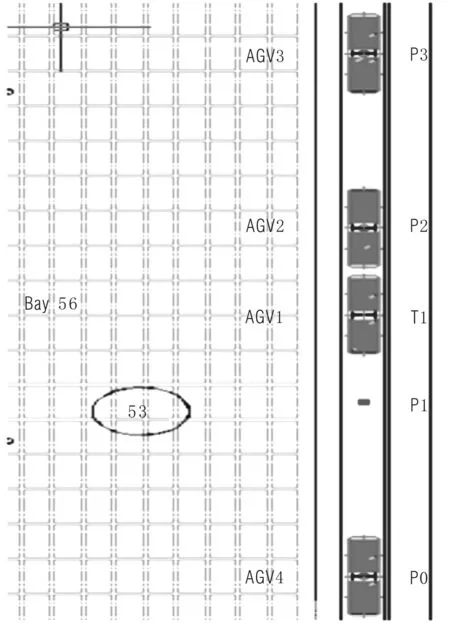
圖5 固定停車位的分配
5.3 入口停車位
在21 m通道的入口處,設計有入口停車位。AGV在進入箱區前,路徑規劃至入口停車位。在TOS(Tape Operating System,生產管理系統)給出該AGV的實際作業次序后,VMS(AGV Management System,集裝箱自動導引運輸車管理系統)為之分配實際的作業車道停車位,并規劃AGV從入口停車位至作業車道停車位的路徑。如圖6所示。AGV1在通道入口停車位,分配了車道停車位P1。AGV1從入口停車位,通過2次斜行進入作業車道停車位。

圖6 洋山深水港四期懸臂箱區通道入口停車位
5.4 出口停車位
在21 m通道的出口處,設計有出口停車位。VMS為AGV規劃,自作業位經出口停車位至目標位置的路徑,如圖7所示。AGV1 在P2完成作業后,規劃了經出口停車位的路徑。AGV1從作業位,通過2次斜行,經出口停車位,轉彎進入高速車道。
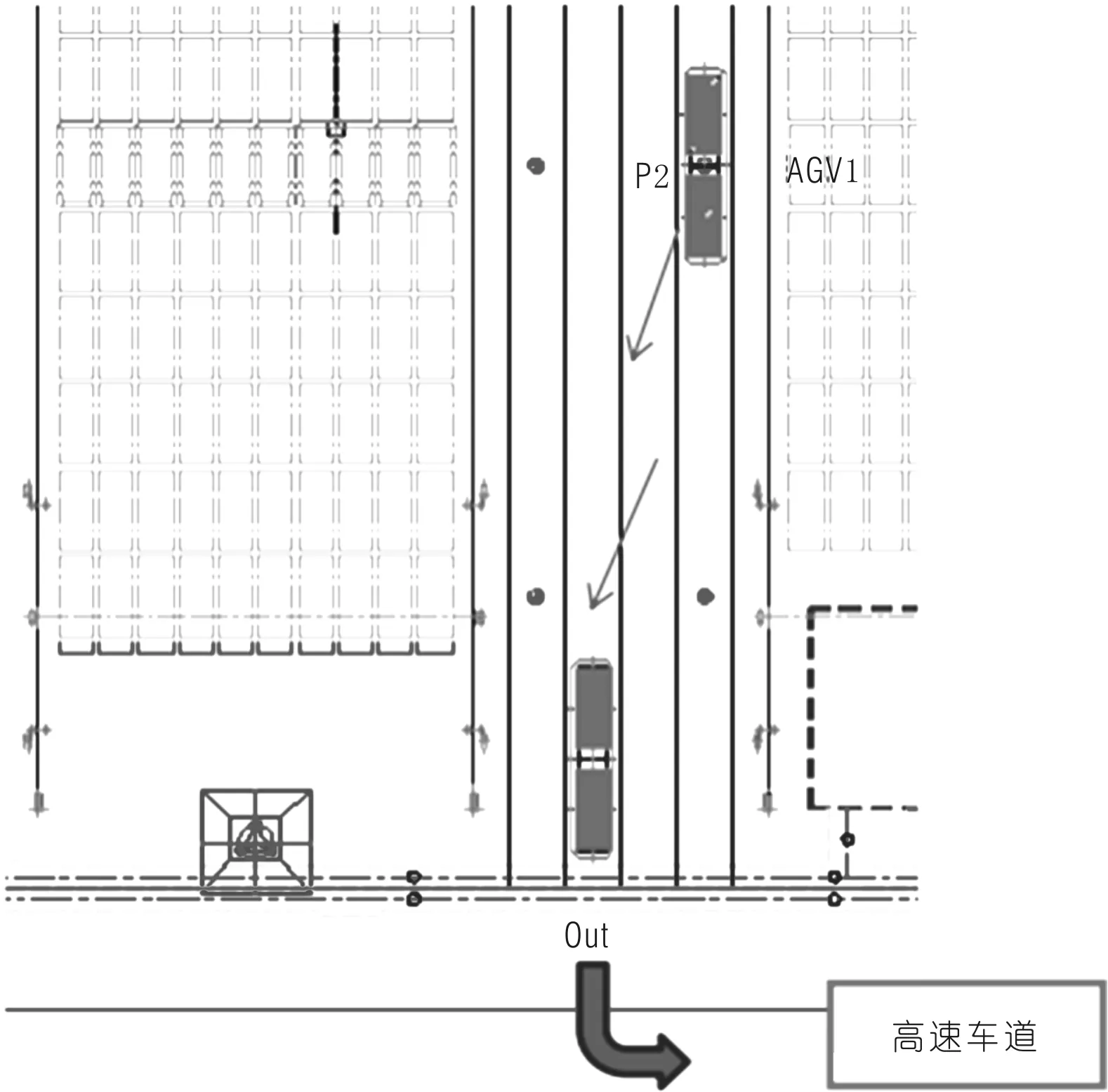
圖7 洋山深水港四期懸臂箱區通道出口停車位
5.5 驅離機制
AGV1在懸臂箱區,離開固定停車位去作業位作業時,如果作業位附近的作業車道上有AGV2影響到AGV1的作業,此時,如果AGV1的作業優先級高于AGV2,則將AGV2 驅離該停車位,并重新計劃所有 AGV的停車位,或者僅僅是讓 AGV2 略作偏離;如果AGV1的作業優先級低于AGV2,則AGV2繼續作業,AGV1等待。
6 結語
自動化碼頭堆場的安全及效率不僅是洋山深水港四期工程追求的目標,也是全球各自動化碼頭不斷探索的課題[3]。目前,洋山深水港四期自動化堆場的懸臂箱區已投入實際生產,設備和系統安全穩定,箱區和通道管控合理,作業質量良好。本文結合洋山深水港四期懸臂箱區應用實例,梳理總結了洋山深水港四期懸臂箱區貝位、作業交互點的一般定義規則,以及懸臂箱區的2臺懸臂吊之間防撞和避讓、AGV通道管控的基本規則,可為類似的自動化碼頭堆場懸臂箱區的應用提供參考。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
故事大王(2016年7期)2016-09-22 17:30:08
西安航空學院學報(2014年5期)2014-07-13 01:27:52
機電信息(2014年27期)2014-02-27 15:53:56
