基于模型預(yù)測控制的某救助船減搖鰭控制系統(tǒng)的仿真研究
2019-03-12 22:39:58徐碩
珠江水運 2019年3期
徐碩
摘 要:為更好地對減搖鰭進(jìn)行控制,該文創(chuàng)造性地將模型預(yù)測控制引入減搖鰭控制系統(tǒng)中,并以“南海救118”輪減搖鰭控制系統(tǒng)為例,通過仿真研究,將PID控制和模型預(yù)測控制進(jìn)行對照,得出模型預(yù)測控制效果要好于PID控制,從理論上對減搖鰭的設(shè)計進(jìn)行指導(dǎo)。
關(guān)鍵詞:救助船 減搖鰭 模型預(yù)測控制
1.引言
救助船往往都是在急難險重的情況下出動,在風(fēng)浪中會有較大搖晃,為了保存救助人員的體能和精力,保障船舶設(shè)備特別是特種設(shè)備的安全性和可靠性,需要在船上安裝有減搖鰭來減小船舶的橫搖、縱搖等各種運動,其中,橫搖是比較劇烈的一種運動,本文接下來的模型處理也只針對橫搖運動。傳統(tǒng)的減搖鰭控制系統(tǒng)主要采用PID控制,即接收陀螺儀和綜合模塊中的信號經(jīng)過比例電路、積分電路、微分電路等對該信號進(jìn)行處理,這種處理方式比較簡單,而海上波浪變化萬千,具有很強的隨機性和非線性,為使得減搖控制更加高效,我們需要一種新的控制算法來優(yōu)化控制性能。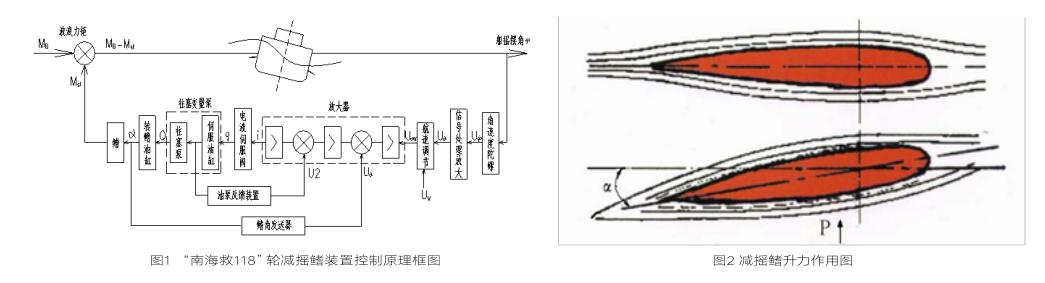
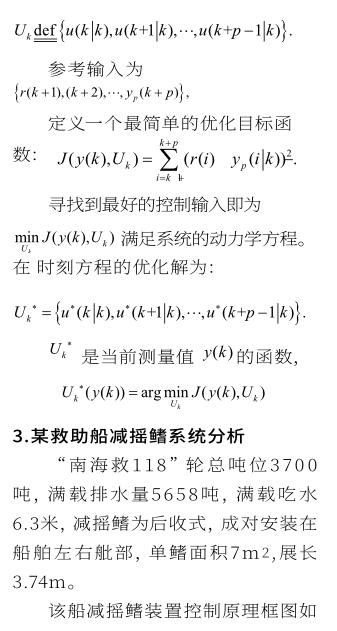
2.模型預(yù)測控制簡介
模型預(yù)測控制是一種現(xiàn)代的先進(jìn)控制算法,它克服了PID控制簡單的反饋控制調(diào)節(jié)及單回路控制,可以從系統(tǒng)的角度進(jìn)行全局控制,在確定了系統(tǒng)的預(yù)測模型后,在預(yù)測時域內(nèi)對系統(tǒng)的動態(tài)進(jìn)行預(yù)測,在每一個采樣時刻進(jìn)行優(yōu)化,將優(yōu)化解作用于系統(tǒng),循環(huán)滾動進(jìn)行,在線實時反饋。對于像船舶減搖鰭這種需要時時刻刻跟隨波浪的變化進(jìn)行動作的系統(tǒng)來說,模型預(yù)測控制是一種非常好的控制算法。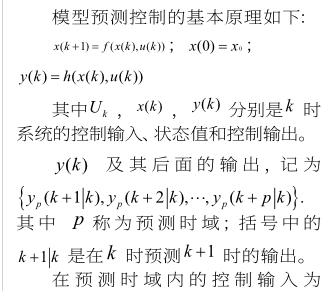
4.船舶減搖鰭系統(tǒng)仿真分析
本文根據(jù)以上船舶橫搖、減搖鰭模型及“南海救118”輪的相應(yīng)參數(shù)運用MATLAB/Simulink軟件進(jìn)行仿真。仿真過程中,海浪模擬信號采用高斯噪聲疊加正弦波為擾動信號,波浪擾動信號如圖3所示。
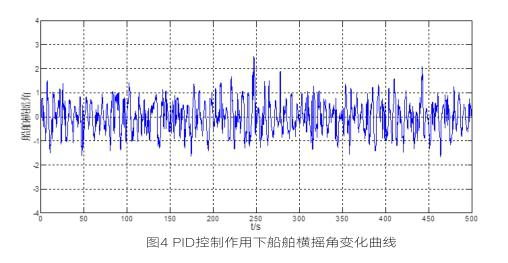
在仿真過程中使用PID控制器進(jìn)行控制得到的船舶橫搖角變化如圖4所示:
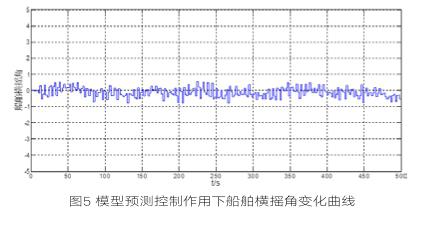
在這里,我們將上面PID控制中的傳遞函數(shù)通過計算轉(zhuǎn)化為狀態(tài)空間方程,運用MATLAB/Simulink工具進(jìn)行仿真,運行后得到的船舶橫搖角變化如圖5所示。
通過對比上面的仿真響應(yīng)曲線,我們可以明顯地看到模型預(yù)測控制在減搖鰭控制中要遠(yuǎn)遠(yuǎn)優(yōu)越于傳統(tǒng)的PID控制,展現(xiàn)了較強的控制性能。
5.結(jié)束語
減搖鰭的控制需要較好的跟蹤響應(yīng),模型預(yù)測控制所具有的滾動優(yōu)化和前饋-反饋控制的結(jié)構(gòu)特點可以幫助我們實現(xiàn)這一點。根據(jù)其控制原理,它可以在線實時優(yōu)化,并且在優(yōu)化問題中有針對波浪的變化進(jìn)行的前饋補償,還有基于船舶橫搖角變化的反饋補償。通過上面的仿真分析,證明了模型預(yù)測控制能夠較好實現(xiàn)減搖效果,希望本文能夠?qū)p搖鰭設(shè)計及生產(chǎn)方在系統(tǒng)控制方面利用模型預(yù)測控制算法有所啟發(fā)。
參考文獻(xiàn):
[[1]席裕庚.預(yù)測控制[M].北京:國防工業(yè)出版社,2013.
[2]王琳.非收放式減搖鰭控制系統(tǒng)的設(shè)計[D].大連:大連海事大學(xué),2016.
[3]楊波.基于海浪譜的減搖鰭控制系統(tǒng)研究[D].哈爾濱:哈爾濱工程大學(xué),2011.
[4]羅德紅.BP神經(jīng)網(wǎng)絡(luò)應(yīng)用于船舶減搖鰭控制系統(tǒng)的仿真研究[J].電氣自動化,2011(2),25-27.
[5]于艷博.船舶橫搖運動建模與控制仿真研究[D]. 大連:大連海事大學(xué),2014.