交叉口無(wú)干擾條件下右轉(zhuǎn)機(jī)動(dòng)車(chē)軌跡建模
2019-03-08 01:00:04羅瑞琪孟維偉朱曉東
城市道橋與防洪 2019年1期
關(guān)鍵詞:模型
羅瑞琪,劉 巖,孟維偉,朱曉東
(1.中國(guó)市政工程華北設(shè)計(jì)研究總院有限公司,天津市 300110;2.天津市市政工程設(shè)計(jì)研究院,天津市 300041)
0 引言
車(chē)輛行駛軌跡仿真是仿真模型的重要組成部分,是動(dòng)態(tài)模擬車(chē)輛微觀行為的前提和基礎(chǔ)。其中,轉(zhuǎn)彎車(chē)輛是信號(hào)交叉口產(chǎn)生沖突的主要原因,是信號(hào)交叉口仿真分析的重要內(nèi)容,但左轉(zhuǎn)車(chē)輛軌跡受多種因素影響,變化范圍大,難以用數(shù)學(xué)模型準(zhǔn)確表示[1]。右轉(zhuǎn)車(chē)輛軌跡受幾何條件影響,具有距離短、變化范圍小等特點(diǎn),因此建立右轉(zhuǎn)軌跡模型,可以使得交通狀況得以更好的再現(xiàn),為交叉口的轉(zhuǎn)角、轉(zhuǎn)彎半徑的設(shè)計(jì)和右轉(zhuǎn)車(chē)輛的信號(hào)控制提供依據(jù)。
國(guó)內(nèi)外研究學(xué)者對(duì)于右轉(zhuǎn)車(chē)輛的研究主要集中在以下兩個(gè)方面:一方面是分析右轉(zhuǎn)車(chē)輛與行人和非機(jī)動(dòng)車(chē)沖突行為,建立延誤模型[2-4];另一方面是通過(guò)分析右轉(zhuǎn)車(chē)輛與行人和機(jī)動(dòng)車(chē)的干擾行為,提出信號(hào)交叉口右轉(zhuǎn)車(chē)輛的控制條件[5-7],為信號(hào)控制提供依據(jù)。Stover等[8-9]對(duì)不同交叉口的右轉(zhuǎn)軌跡數(shù)據(jù)進(jìn)行了調(diào)查,大量數(shù)據(jù)表明該軌跡受多種因素的影響,且其變化會(huì)對(duì)其他道路使用者造成干擾,因此在交叉口設(shè)計(jì)中,應(yīng)將車(chē)輛轉(zhuǎn)彎軌跡作為重點(diǎn)考慮因素之一。Walton等[10]和Read[11]利用視頻采集技術(shù),對(duì)不同信號(hào)交叉口的不同車(chē)型車(chē)輛右轉(zhuǎn)軌跡進(jìn)行調(diào)查,結(jié)果顯示轉(zhuǎn)彎車(chē)輛軌跡與車(chē)輛類(lèi)型、交叉口幾何條件等因素有關(guān)。隨著人們對(duì)微觀行為研究的深入,Alhajyaseen等[12]對(duì)不同交叉口右轉(zhuǎn)車(chē)輛軌跡進(jìn)行調(diào)查,將右轉(zhuǎn)車(chē)輛軌跡用歐拉曲線、圓曲線、直線段來(lái)表示,且假設(shè)曲線參數(shù)滿足正態(tài)分布,分布參數(shù)與交叉口幾何條件和交通條件等因素有關(guān)。
綜上所述,國(guó)內(nèi)外對(duì)于右轉(zhuǎn)機(jī)動(dòng)車(chē)的研究主要集中于沖突行為以及信號(hào)控制方面,對(duì)于軌跡方面的研究甚少,并且未建立具體的軌跡模型。因此本文將以大量數(shù)據(jù)為基礎(chǔ),利用視頻檢測(cè)技術(shù),結(jié)合Track pro軟件對(duì)不同幾何條件交叉口無(wú)行人、無(wú)非機(jī)動(dòng)車(chē)干擾下的右轉(zhuǎn)車(chē)輛軌跡進(jìn)行追蹤,選取合適模型對(duì)右轉(zhuǎn)車(chē)輛軌跡進(jìn)行描述,分析右轉(zhuǎn)軌跡的影響因素,并結(jié)合實(shí)測(cè)數(shù)據(jù)建立影響因素與模型參數(shù)的映射關(guān)系,建立無(wú)干擾下右轉(zhuǎn)車(chē)輛軌跡模型。右轉(zhuǎn)車(chē)輛軌跡模型可以很好地描述不同幾何條件交叉口右轉(zhuǎn)車(chē)輛的軌跡行為,為微觀仿真提供理論支持。
1 數(shù)據(jù)采集
1.1 調(diào)查地點(diǎn)
調(diào)查地點(diǎn)位于蘇州市。調(diào)查地點(diǎn)在交叉口幾何布局方面存在很大不同,如轉(zhuǎn)彎半徑、交叉口轉(zhuǎn)角、出口道數(shù)目等,這種布局上的變化對(duì)于分析右轉(zhuǎn)車(chē)輛的軌跡模型極為重要。
參照?qǐng)D1調(diào)查交叉口的幾何條件,建立坐標(biāo)軸,O為坐標(biāo)軸原點(diǎn),θ為交叉口轉(zhuǎn)角,即右轉(zhuǎn)出口道中心線與進(jìn)口道中心線(交點(diǎn)為r)所形成的夾角,rad;A為出口道中線與停止線交點(diǎn),B為進(jìn)口道中線與人行道內(nèi)側(cè)邊緣線交點(diǎn);C為O與B兩點(diǎn)之間的水平距離,m;D為O與A兩點(diǎn)之間的垂直距離,m。

圖1 交叉口幾何參數(shù)定義示意圖
1.2 數(shù)據(jù)獲取方法
Track pro是基于視頻采集獲得行人或車(chē)輛時(shí)空數(shù)據(jù)的分析軟件,利用該軟件可以獲得車(chē)輛的位置坐標(biāo)、速度、位移等數(shù)據(jù)。數(shù)據(jù)獲取方法主要有以下4個(gè)步驟(見(jiàn)圖2):(a)選取合適調(diào)查地點(diǎn)和調(diào)查時(shí)間,拍攝視頻;(b)結(jié)合視頻檢測(cè)技術(shù),利用Track pro軟件,建立坐標(biāo)軸,以進(jìn)口道停車(chē)線和右轉(zhuǎn)車(chē)道內(nèi)側(cè)車(chē)道線交點(diǎn)為原點(diǎn),右轉(zhuǎn)車(chē)輛出口道方向?yàn)閤軸,垂直方向?yàn)閥軸;(c)根據(jù)視頻觀測(cè)角度,通過(guò)標(biāo)定,將像素坐標(biāo)轉(zhuǎn)變?yōu)榈乩碜鴺?biāo);(d)采集轉(zhuǎn)彎車(chē)輛位置坐標(biāo)點(diǎn)及對(duì)應(yīng)點(diǎn)的速度值,計(jì)算平均位置坐標(biāo),從而獲得車(chē)輛平均軌跡。
車(chē)輛軌跡由一系列時(shí)空點(diǎn)組成,采樣間隔0.12 s。因所有視頻觀測(cè)點(diǎn)均為交叉口高處建筑,觀測(cè)角度大,考慮到轉(zhuǎn)彎車(chē)輛尺寸,將車(chē)輛前部中心處為位置參考點(diǎn)。本文研究?jī)?nèi)容為無(wú)行人、無(wú)非機(jī)動(dòng)車(chē)干擾時(shí)右轉(zhuǎn)軌跡模型,因此在數(shù)據(jù)提取時(shí),選取無(wú)行人、無(wú)非機(jī)動(dòng)車(chē)干擾情況下的軌跡數(shù)據(jù)。為簡(jiǎn)化模型,僅對(duì)小型車(chē)右轉(zhuǎn)數(shù)據(jù)進(jìn)行調(diào)查。
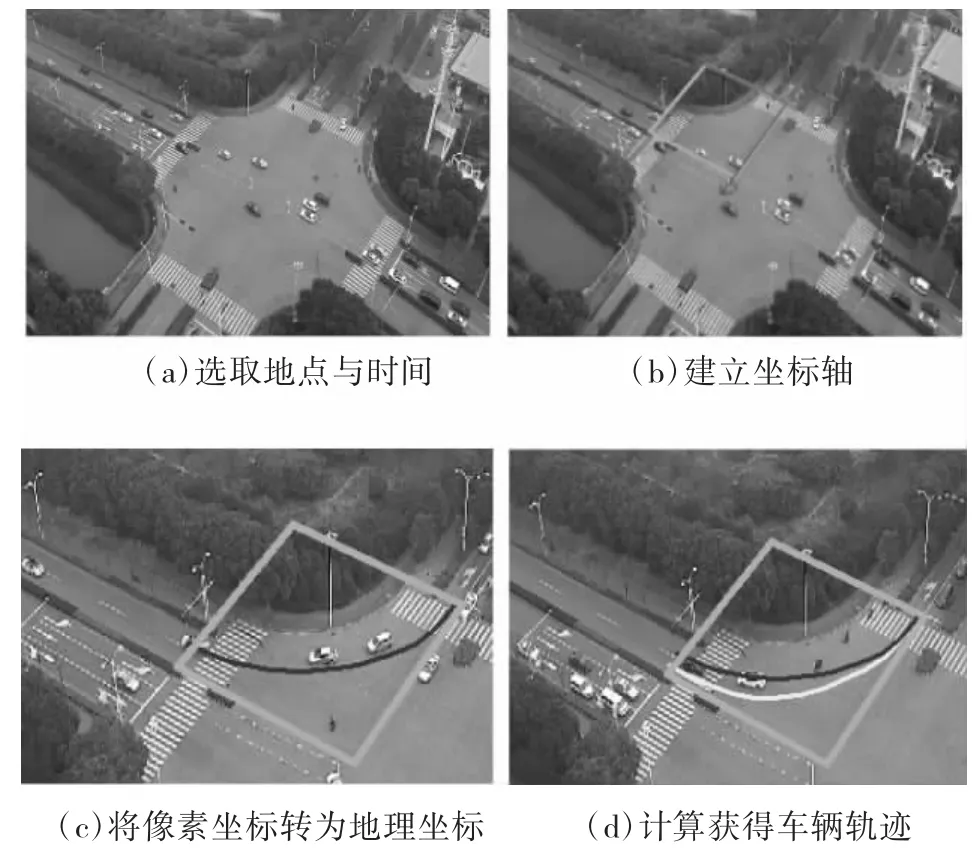
圖2 數(shù)據(jù)獲取方法示意圖
本文需對(duì)相同進(jìn)口道、出口道的右轉(zhuǎn)車(chē)輛平均位置坐標(biāo)及平均速度進(jìn)行計(jì)算,平均速度為所有右轉(zhuǎn)車(chē)輛速度的平均值;結(jié)合圖2建立的坐標(biāo)軸,統(tǒng)計(jì)n條軌跡數(shù)據(jù),假設(shè)n=3,在同一坐標(biāo)系中計(jì)算不同軌跡點(diǎn)、相同橫坐標(biāo)下的平均縱坐標(biāo),最后得到一系列平均軌跡坐標(biāo)點(diǎn),平均軌跡坐標(biāo)點(diǎn)的連線即為調(diào)查地點(diǎn)轉(zhuǎn)彎車(chē)輛的平均軌跡。以星明街-現(xiàn)代大道西側(cè)進(jìn)口道右轉(zhuǎn)車(chē)輛為例,利用軟件,對(duì)110輛右轉(zhuǎn)小汽車(chē)的右轉(zhuǎn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì),則得到110組數(shù)據(jù)(n=110),利用上述方法計(jì)算平均軌跡坐標(biāo)點(diǎn),共得到20個(gè)坐標(biāo)點(diǎn),計(jì)算結(jié)果如表1所示,坐標(biāo)點(diǎn)的連線即為該地點(diǎn)右轉(zhuǎn)車(chē)輛的平均軌跡。
2 右轉(zhuǎn)機(jī)動(dòng)車(chē)軌跡模型
2.1 軌跡影響因素分析
本文針對(duì)交叉口無(wú)干擾條件下右轉(zhuǎn)車(chē)輛軌跡進(jìn)行建模,因此不考慮行人和非機(jī)動(dòng)車(chē)的影響,僅將交叉口尺寸以及車(chē)輛速度作為右轉(zhuǎn)軌跡的影響因素。通過(guò)調(diào)查,交叉口轉(zhuǎn)角、轉(zhuǎn)彎半徑、出口道數(shù)目、車(chē)輛速度是車(chē)輛軌跡的主要影響因素。其中因交叉口實(shí)際狀況,轉(zhuǎn)彎半徑較難準(zhǔn)確測(cè)量,因此定義參數(shù)C和參數(shù)D(對(duì)于同一進(jìn)口道、不同出口道右轉(zhuǎn)軌跡的影響因素也可以用參數(shù)C和D來(lái)表示),將交叉口轉(zhuǎn)角θ、距離D、距離C、速度V這4個(gè)參數(shù)作為右轉(zhuǎn)車(chē)輛軌跡影響參數(shù)。
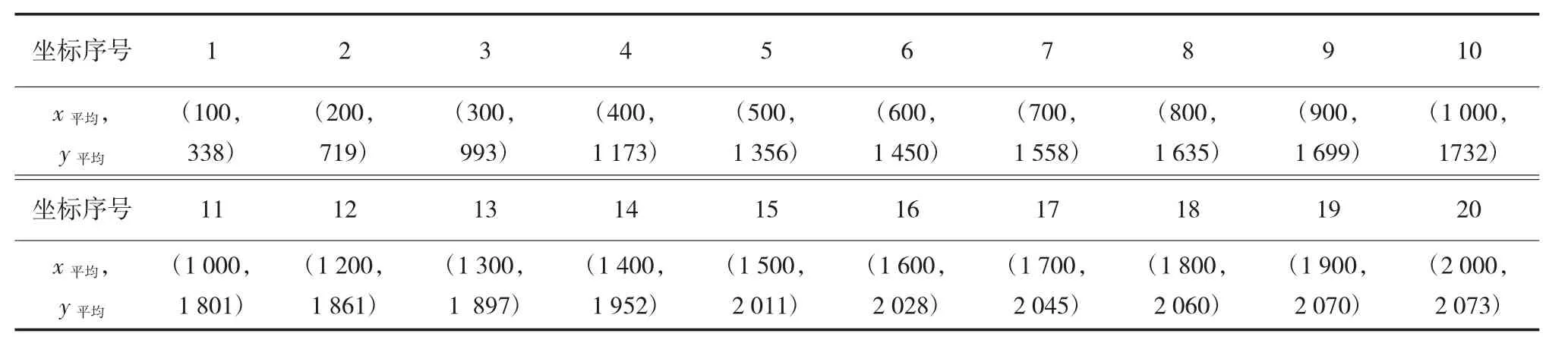
表1 右轉(zhuǎn)車(chē)輛平均軌跡坐標(biāo)點(diǎn)cm
2.2 軌跡模型建立
通過(guò)調(diào)查軌跡數(shù)據(jù),分別用對(duì)數(shù)函數(shù)、二次多項(xiàng)式對(duì)調(diào)查地點(diǎn)軌跡進(jìn)行擬合,擬合結(jié)果如表2所示。在置信度為95%情況下,利用對(duì)數(shù)函數(shù)擬合,相比二次多項(xiàng)式擬合效果要好,因此最終確立右轉(zhuǎn)機(jī)動(dòng)車(chē)軌跡模型為:

式中:x為橫坐標(biāo),cm;y為縱坐標(biāo),cm;a,b 為模型參數(shù)。
根據(jù)實(shí)測(cè)數(shù)據(jù),統(tǒng)計(jì)得到軌跡模型參數(shù)a值隨轉(zhuǎn)角θ、距離C、距離D和速度V的增加而增加,軌跡模型參數(shù)b值隨轉(zhuǎn)角θ、距離C、距離D、速度V的增加而減少。因此a值、b值與4個(gè)軌跡影響因素的關(guān)系可以表示為:

利用最大似然估計(jì)法分別對(duì)上述參數(shù)進(jìn)行估計(jì),最終得到軌跡模型如式(4)~式(6)所示。由結(jié)果R2可知,線性模型對(duì)參數(shù)a和b擬合效果較好。

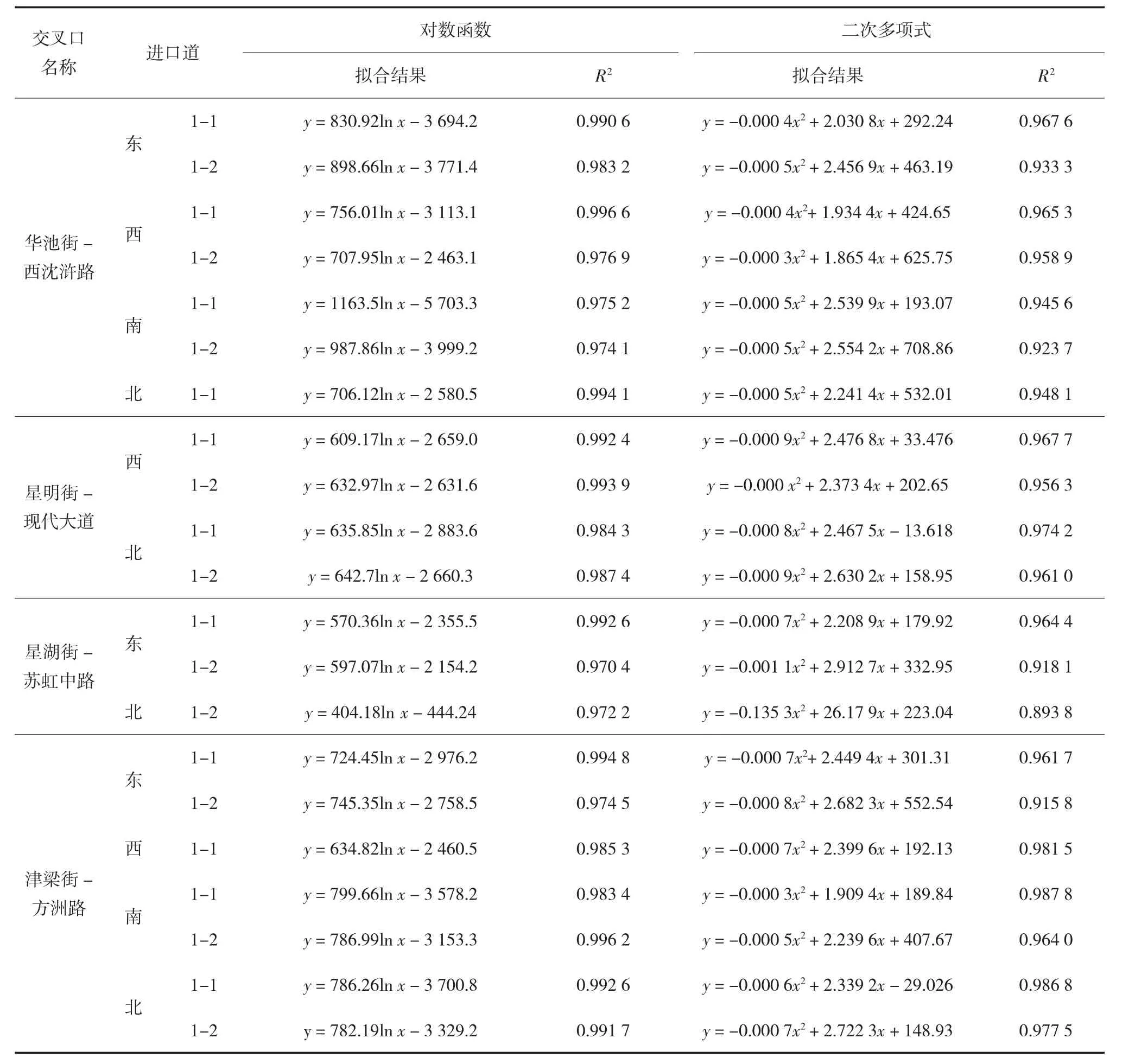
表2 軌跡擬合結(jié)果表

3 實(shí)例驗(yàn)證
選擇金雞湖大道-星湖街交叉口的南進(jìn)口道作為驗(yàn)證地點(diǎn),確定調(diào)查時(shí)間為 8:00~9:00,該進(jìn)口道設(shè)有一個(gè)右轉(zhuǎn)專(zhuān)用車(chē)道,尺寸如下:R=12.21 m;θ=1.585 3 rad;C=22.5 m;D=25.4 m;V=20.35 km/h。假定車(chē)輛在驗(yàn)證地點(diǎn)的右轉(zhuǎn)軌跡服從式(4)~式(6),將幾何尺寸代入,得到:a=255.26,b=1 888.96。
針對(duì)調(diào)查交叉口計(jì)算平均軌跡,分別使用兩種計(jì)算方法得到計(jì)算軌跡與實(shí)際軌跡數(shù)據(jù)的相對(duì)誤差。因選取實(shí)際軌跡坐標(biāo)點(diǎn)與計(jì)算坐標(biāo)點(diǎn)橫坐標(biāo)相同,故選擇縱坐標(biāo)值計(jì)算誤差,軌跡計(jì)算值與實(shí)際值的對(duì)比見(jiàn)圖3。由圖3可見(jiàn),利用本文模型計(jì)算的軌跡坐標(biāo)點(diǎn)與實(shí)際值的最大相對(duì)誤差為14.25%,最小相對(duì)誤差為0.34%,平均相對(duì)誤差為3.78%,在可接受范圍內(nèi),因此該模型對(duì)無(wú)行人、無(wú)非機(jī)動(dòng)車(chē)干擾下的右轉(zhuǎn)機(jī)動(dòng)車(chē)軌跡的預(yù)測(cè)具有一定的可靠性。
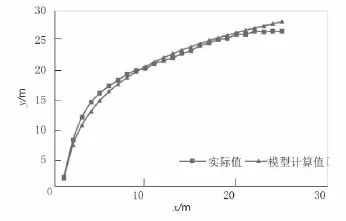
圖3 軌跡計(jì)算值與實(shí)際值對(duì)比圖
4 結(jié) 語(yǔ)
運(yùn)用視頻提取技術(shù),分析了無(wú)行人、無(wú)非機(jī)動(dòng)車(chē)干擾情況下右轉(zhuǎn)機(jī)動(dòng)車(chē)軌跡的影響因素,建立了基于幾何條件的交叉口右轉(zhuǎn)車(chē)輛軌跡模型;運(yùn)用實(shí)測(cè)數(shù)據(jù)對(duì)模型的參數(shù)進(jìn)行了標(biāo)定,并選取實(shí)際地點(diǎn)對(duì)模型進(jìn)行了驗(yàn)證。驗(yàn)證結(jié)果表明:本文方法預(yù)測(cè)效果較好,平均預(yù)測(cè)誤差為3.78%,滿足精度要求。該模型描述了右轉(zhuǎn)車(chē)輛軌跡,可以為仿真技術(shù)提供支持,為交叉口平面設(shè)計(jì)和信號(hào)控制提供依據(jù)。
由于受軟件精度的影響,數(shù)據(jù)采集的精準(zhǔn)性仍需進(jìn)一步提高,且后續(xù)研究中需對(duì)有干擾情況下的右轉(zhuǎn)車(chē)輛軌跡行為進(jìn)行分析,建立實(shí)用性更強(qiáng)的軌跡模型。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
- 城市道橋與防洪的其它文章
- 交通運(yùn)輸部關(guān)于發(fā)布《公路瀝青路面養(yǎng)護(hù)設(shè)計(jì)規(guī)范》的公告
- 交通運(yùn)輸部關(guān)于發(fā)布《公路滑坡防治設(shè)計(jì)規(guī)范》的公告
- 交通運(yùn)輸部關(guān)于發(fā)布《公路橋梁景觀設(shè)計(jì)規(guī)范》的公告
- 交通運(yùn)輸部關(guān)于發(fā)布《公路橋梁抗風(fēng)設(shè)計(jì)規(guī)范》的公告
- 住房城鄉(xiāng)建設(shè)部發(fā)布10項(xiàng)推動(dòng)城市高質(zhì)量發(fā)展標(biāo)準(zhǔn)
- 住房城鄉(xiāng)建設(shè)部等7部門(mén)聯(lián)合下發(fā)通知專(zhuān)項(xiàng)整治工程建設(shè)領(lǐng)域“掛證”等違法違規(guī)行為