探測器月地轉移入射變軌策略優化設計
2019-03-06 01:09:46
航天器工程 2019年1期
(北京空間飛行器總體設計部,北京 100094)
在月球采樣返回任務或載人登月任務中,都可能涉及探測器從環月軌道出發,通過變軌機動進入月地轉移軌道。月地轉移入射(Trans-Earth Insertion,TEI)變軌策略的優化設計是一個經典的月球探測軌道設計問題,也是我國實現探測器月球采樣返回必須突破的一項關鍵軌道設計技術。
國內外諸多學者已對探測器月地轉移入射變軌策略的設計進行了深入的研究[1-5]。文獻[1]針對從環繞月球的圓形軌道出發進入逃逸軌道的問題,研究了一脈沖和兩脈沖變軌方案,其中第一個脈沖在環繞軌道上施加,而兩脈沖變軌方案的第二個脈沖是在月球影響球邊界上施加的,主要用于改變軌道平面。文獻[2]研究了從橢圓軌道上采用最優三脈沖變軌方案實現給定逃逸雙曲線超速矢量,得到了計算變軌序列的分析公式,然后采用數值方法進行軌道優化。文獻[3]則考慮了從環月軌道出發進入月地轉移軌道的問題,先針對一脈沖變軌方案推導得到了變軌位置和變軌量的分析求解公式,然后在此基礎上推廣討論了在環月軌道通過三次變軌機動,實現從環月軌道進入月地轉移軌道的算法。文獻[4-5]則考慮了在月球探測任務燃料預算緊張情況下的月地轉移變軌策略,通過一次環月軌道變軌機動進入低能月地轉移軌道,之后在日地或地月拉格朗日點附近執行一次速度增量很小的軌道機動,來瞄準地球再入條件。上述月地轉移入射一脈沖、兩脈沖、三脈沖和低能月地轉移軌道方案在速度增量、月地轉移飛行時間等方面有顯著差別,所以各有優缺點和工程適用范圍。本文在綜合月地轉移入射多方案研究成果的基礎上,對各方案分別進行分析,發展了文獻[1,3]中月地轉移入射一次變軌策略的優化算法,并根據工程設計中的實際需求,針對月地轉移入射變軌策略從一脈沖改為兩脈沖的問題進行了研究,提出了月地轉移入射兩脈沖變軌策略的優化算法。另外,為了應對因故障原因導致的錯過月地轉移窗口、剩余推進劑余量不足等情況,需要制定軌道故障預案,所以還對月地轉移入射三脈沖方案和低能月地轉移軌道展開了討論,得到了一些對工程設計有重要參考價值的結果。最后,對這些方案進行了比較分析,確定了各方案的優缺點和適用條件,可供開展月球采樣返回任務時制定月地轉移入射變軌策略參考。
1 問題的提出
在月球采樣返回任務的月地返回階段,軌道器和返回器的組合體(簡稱組合體)在環月軌道上等待數天,在預定的月地轉移日期,通過軌道器發動機實施變軌機動,組合體進入月地轉移軌道,其終點是位于地球大氣邊界的再入點。工程設計中發現,月地轉移入射如果采用一次變軌方案,為了減少重力損耗和減輕熱控、電源等分系統的負擔,變軌時間不能太長,這就需要采用大推力發動機;另一方面,由于月地轉移入射時組合體的質量比采樣返回任務初期時小了很多,若采用大推力發動機,對組合體結構柔性振動的激勵較大,難以實現高精度軌道控制,存在較大軌道控制風險。為此,考慮將月地轉移入射一次變軌機動的方案改為分成兩次執行,這樣每次變軌的時間不長,可以采用較小推力的發動機實施。
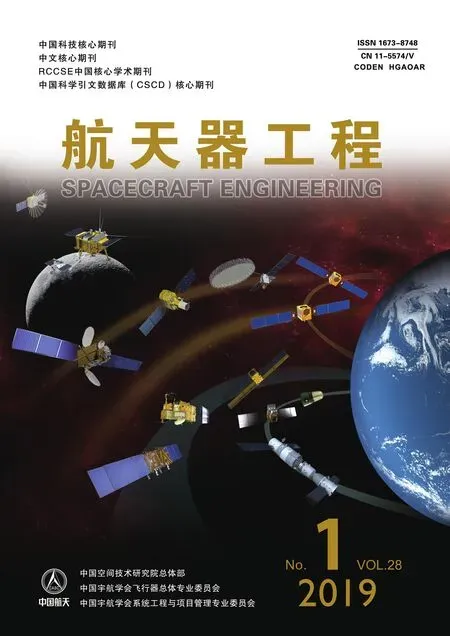
月地轉移入射兩脈沖方案的軌道示意如圖1所示,其中第1次變軌的目標是從環月近圓軌道進入周期約為8 h或12 h的大橢圓軌道,第2次變軌的目標和月地轉移入射一脈沖方案類似,即瞄準理想的再入點參數:再入點高度、再入角、再入點軌道傾角、預定著陸點地心矢徑和軌道面夾角(0°)。
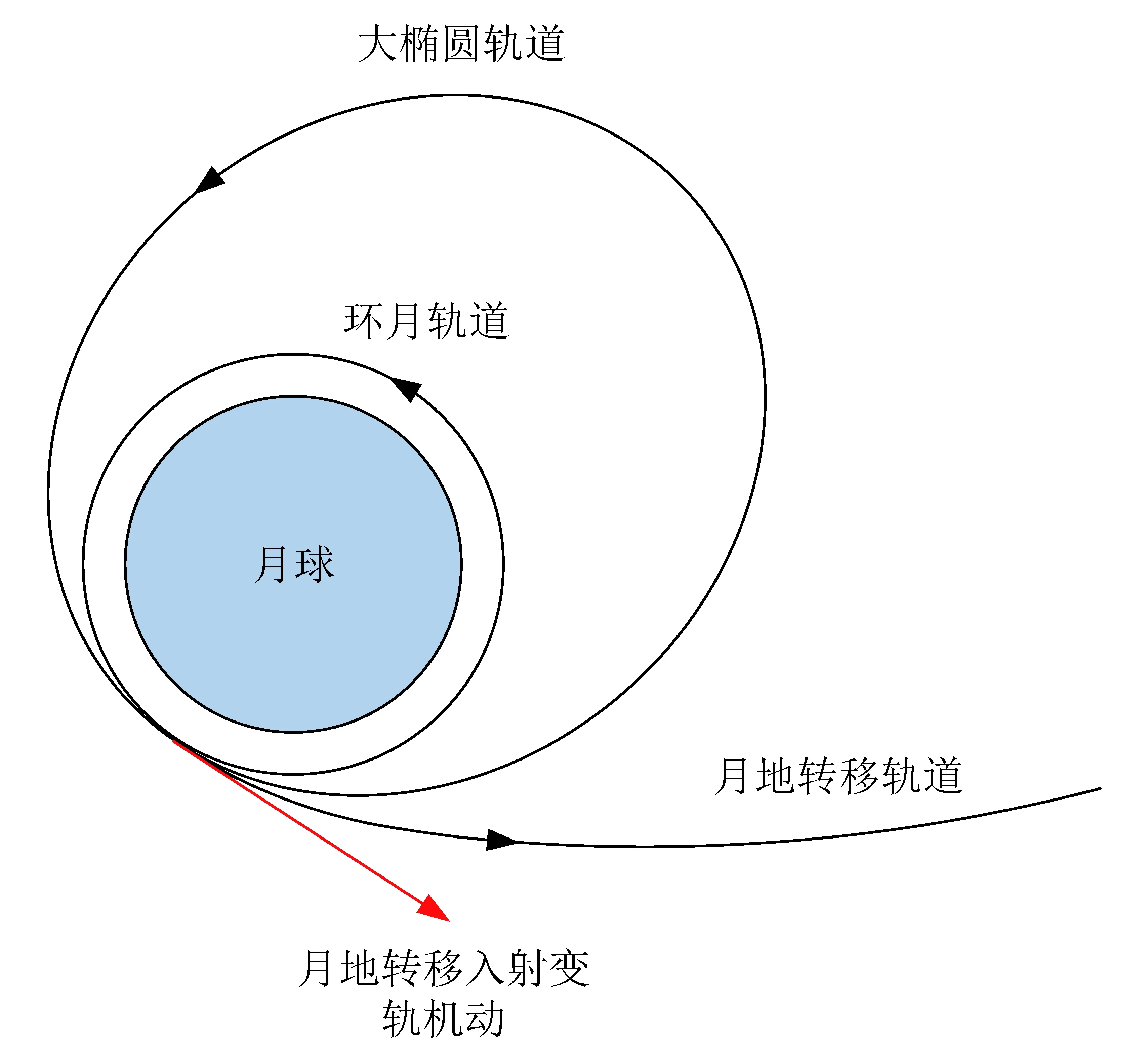
圖1 月地轉移入射兩脈沖軌道方案Fig.1 Two-impulse TEI strategy illustration
從以上討論可以看出,這里的兩脈沖方案和文獻[1]中的兩脈沖方案考慮的出發點是不同的。由于這里的兩脈沖方案是由一脈沖方案演變而來的,其兩次變軌速度增量的方向和一脈沖方案變軌速度增量的方向基本一致。其中,第1次變軌的控制目標是軌道周期(調相),是1對1的控制(設計變量是變軌速度增量大小);第2次變軌是4對4的微分修正控制,其設計變量和控制目標均與一脈沖方案類似,即設計量為變軌速度增量的3個分量和到達再入點的時間,控制目標是前面提到的4個再入參數的理想數值。
本文的主要目的就是對月地轉移入射一脈沖和兩脈沖方案的變軌策略進行詳細討論,并進一步拓展討論三脈沖方案和低能月地轉移軌道方案,在此基礎上對不同方案的適用范圍開展比較分析。
2 月地轉移入射一次變軌策略
2.1 月球逃逸雙曲線超速的近似計算

圖2為月地轉移軌道在地心天球上的示意圖,圖2中給出了月地轉移軌道起點(遠地點)的月球位置和月地轉移軌道終點(近地點)的位置。其中,遠地點的月球位置矢量可以根據月球星歷得到,而近地點的位置矢量可以認為近似沿遠地點月球位置矢量的反方向,近地點高度可取60 km。
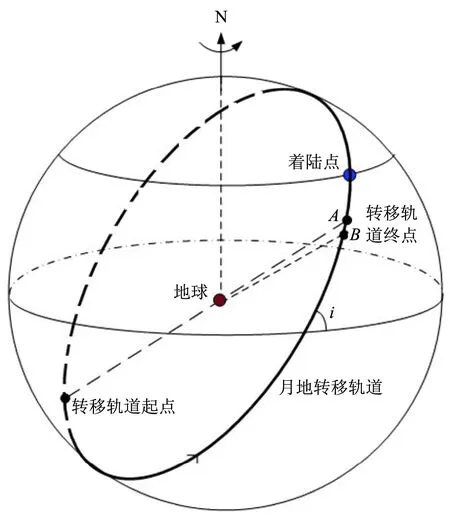
圖2 月地轉移軌道在天球上的投影Fig.2 Moon-to-earth transfer on celestial sphere

另一方面,當月地轉移軌道終點的位置矢量是嚴格沿著遠地點月球位置矢量的反方向時,如果沒有其它約束,Lambert問題有無窮多個解。為得到唯一解,可以取月地轉移軌道終點的位置矢量稍微偏離遠地點月球位置矢量的反方向(圖2中轉移軌道終點B稍微偏離終點A),同時使得月地轉移軌道的傾角近似為理想的再入點軌道傾角。
2.2 一次變軌優化算法
參考圖3,初始環月軌道參數已知,設軌道角動量為h0,月地逃逸軌道的軌道角動量為hf,月地轉移軌道和環月軌道的交點(變軌點)月心矢徑為r1,月地轉移入射變軌速度增量矢量為Δv1。在下面的討論中,下標0表示已知初始環月軌道參數,下標f表示月地轉移軌道參數,下標1表示變軌點參數。如果未作特殊說明,后續軌道參數均為在月心慣性系下定義的參數。
圖3 月地轉移入射一次變軌Fig.3 One-impulse TEI strategy
(1)

(2)
上標 ^ 表示單位矢量,下同。

1)計算變軌點軌道參數
(3)

(4)
(5)

2)計算月地轉移軌道相對月球的軌道參數
(6)
(7)
(8)
3)計算變軌量Δv1



(9)

遍歷θ(0°-360°)后,取變軌速度增量最小對應的Δv1為最佳變軌量,最佳變軌緯度幅角為u10=ω0+f10,其中ω0為已知環月軌道近月點幅角。
需要說明的是,在月地轉移入射一脈沖方案變軌策略優化設計中,需要在入射前若干天額外引入一次調相機動來保證在指定入射時刻取得最佳月地轉移入射緯度幅角。另外,測控分析對月地轉移入射變軌策略的實際工程應用是十分必要的,這是因為測控分析能給出月球對測控站可見的時間范圍(測控弧段),其開始和結束時間可作為規劃月地轉移入射變軌策略的天然時間參考[9]。在下一節關于兩次變軌策略的討論中將給出測控分析的進一步說明和算例。
2.3 計算過程
總結以上討論,并考慮實際工程中的測控條件等約束,得到月地轉移入射一脈沖方案變軌策略優化設計的計算過程如下:
(1)根據測控條件分析結果,選擇月地轉移入射變軌機動的時刻;
(2)根據測控條件分析結果,在月地轉移入射變軌機動前若干天選擇調相機動時刻;
(3)根據前述基于二體模型的分析算法,計算最佳月地轉移入射緯度幅角u10和變軌量Δv1;
(4)采用精確軌道動力學模型和4對4微分修正,求解變軌量Δv1的精確值;
(5)在月地轉移入射緯度幅角u10附近小步長調整變軌緯度幅角,求得月地轉移入射緯度幅角u10和變軌量Δv1的優化解;
(6)根據調相機動時刻、月地轉移入射時刻和最佳月地轉移入射緯度幅角u10,計算調相脈沖;
(7)重復迭代計算(3)→(4)→(5)→(6)→(3)→……,直到最佳月地轉移入射緯度幅角u10收斂。例如,當連續兩次迭代計算所得u10數值的差別小于0.1°,即可認為迭代計算收斂。數值分析表明,通常迭代2~3次即可,本算法具有良好的收斂性。
3 月地轉移入射兩次變軌策略
3.1 基于測控條件分析的深空探測軌道設計
在深空探測實際飛行任務中,通常要求變軌機動在地面測控監視下進行,且變軌前留有足夠的測控時長用于定軌、注入等操作。為此,本文提出了一種基于測控條件分析的深空探測軌道設計方法[9-13]。其基本思想是:月球、火星等自然天體(中心點)對地面測站可見的開始時刻和結束時刻可作為進行天體探測軌道設計的天然時間基準;在軌道設計中,變軌機動的時間應當安排在天體中心點對測站可見的時間段內,并為變軌前后的定軌、注入等操作留有足夠的測控時長;盡量把軌道機動的位置(緯度幅角)設置在測控可見對應的緯度幅角范圍內,以便變軌機動在地面測控監視下進行。
例如,假定月地轉移入射的最佳日期是2019年1月4日,由于月球軌道測控條件大約每25 h重復一次[9],在采用月地轉移入射兩次變軌方案時,為了保證兩次變軌均有國內站測控監視且變軌前留有足夠的測控時長,可安排第1次變軌在2019年1月3日實施,而第2次變軌在2019年1月4日實施。計算月心對國內站的測控可見時段,結果見表1。
表1 月心對國內站的測控可見時段
根據表1中的測控分析結果,可以安排第1次變軌在2019年1月3日的測控可見開始時刻(2019-01-03T00:34:08.547)之后,當探測器飛至前述最佳變軌緯度幅角時執行,控制目標是在第2次變軌時刻取得最佳變軌緯度幅角,而第2次變軌時刻可取為2019年1月4日的測控可見開始時刻(2019-01-04T01:34:29.340)加上30 min,即2019-01-04T02:04:29.340。
3.2 計算過程
前面得到了月地轉移入射一次變軌方案的最佳變軌緯度幅角u10和變軌量Δv1,在此基礎上可進一步計算月地轉移入射兩次變軌方案的優化變軌策略。月地轉移入射兩脈沖方案變軌策略優化設計的計算過程如下。
(1)取第2次變軌時刻和月地轉移入射一次變軌方案的入射時刻相同(當天測控可見開始時刻加上30 min),變軌量初值為一次變軌方案變軌量的1/2,即Δv1/2;
(2)根據測控分析結果,安排第1次變軌在第2次變軌前一天的測控可見開始時刻之后,當探測器飛至變軌緯度幅角u1=u10時執行,變軌速度增量大小的初值取為|Δv1|/2,變軌速度增量的方向(方位角α、高度角δ)和Δv1相同,控制目標是在第2次變軌時刻取得緯度幅角u2=u10(調相);
(3)采用高精度軌道動力學模型和微分修正,計算兩次變軌的精確解,其中第1次變軌為1對1微分修正,第2次變軌和一次變軌方案類似,為4對4微分修正;
(4)若有必要,可考慮在以上u1、α、δ和u2所取初值附近小范圍內進行調整(優化),使得總的速度增量∑Δv最小。
可以看出,由于在兩次變軌方案中的第1次變軌具備調相功能,無需像一次變軌方案那樣在月地轉移入射前若干天額外增加一次調相機動。
3.3 算例
假定月地轉移入射的最佳日期是2019年1月4日。表2和表3給出了前面所述優化算法流程對應的月球采樣返回任務月地轉移入射具體數值計算結果。表2中x、y、z表示位置坐標,vx、vy、vz表示速度三分量。可以看出,兩脈沖方案總的速度增量只比一脈沖方案略微有所增加,前面提出的在一脈沖方案計算結果基礎上進行兩脈沖方案變軌策略優化計算的算法是有效的。

表2 環月軌道參數(月心J2000)

表3 一次變軌方案和兩次變軌方案分析結果比較
4 月地轉移入射三次變軌策略
在月球采樣返回任務實施過程中,如果由于故障原因錯過了預定月地轉移窗口,但仍需要盡快實施月地轉移返回地球,這種情況下環月軌道面和月球逃逸軌道面的非共面度(夾角)較大,為避免大的月地轉移入射軌道面修正速度增量,可以考慮采用三脈沖入射方案:先在環月軌道的適當位置實施第一次(平面內)變軌,抬高遠月點高度,進入周期為若干天的大橢圓軌道;然后,當探測器到達遠月點時,實施第二次變軌機動,其主要目的是調整軌道平面,使得調整后的軌道面與逃逸軌道面一致;最后,當探測器飛至近月點時,沿速度方向施加速度增量,探測器進入逃逸軌道(即月地轉移的開始段)[3]。三脈沖入射方案適用于非共面度(夾角)過大條件下的轉移入射,其基本原理是利用遠月點速度較小的特點來減小平面調整的速度增量需求。三脈沖入射方案的具體設計方法簡述如下。
4.1 二體分析
需要說明的是,在三脈沖入射方案中,第二次變軌所在的遠月點高度和第三次變軌所在的近月點高度是設計量。下面討論中選擇近月點高度為200 km,遠月點高度可根據選擇的大橢圓軌道周期計算。
4.2 攝動模型分析
在上述二體分析中,僅考慮了月球對探測器的中心引力。在工程應用設計中,還需要考慮月球非球形引力攝動、太陽和地球三體引力攝動等攝動因素的影響。這些攝動因素會導致實際飛行軌道偏離理想的圓錐截線,從而對具體設計結果包括速度增量等產生較大影響,詳見下面討論。在攝動模型分析中,首先需要進行測控條件分析,確定執行Δv3的具體時間,并使得探測器在國內站共視條件開始時刻后飛至f10時執行Δv1。
為了保證在預定時刻執行Δv3,需要通過調整Δv1的大小進行調相,而Δv1的方位角(α1)和高度角(δ1)采用二體設計值;為了保證執行Δv3的近月點高度為200 km和瞄準再入點參數,采用Δv2的3個分量、Δv3的大小(Δv3方向為速度方向)和再入點時刻為微分修正設計變量。總起來說,采用Δv1的大小、Δv2的3個分量、Δv3的大小和再入點時刻瞄準Δv3執行預定時刻、近月點高度200 km和再入點參數,是一個6對6微分修正過程。
在攝動模型分析中,還可以調整f10、α1和δ1,對總的速度增量進行優化,使得總的速度增量∑Δv最小。
4.3 大橢圓軌道周期的選擇
表4給出了針對某算例開展月地轉移入射三脈沖方案設計時,分別選擇大橢圓軌道周期為1~5天的設計結果。
從表4中可以看出,當選擇大橢圓軌道周期為4~5天時,遠月點平面修正機動速度增量的二體設計結果和攝動模型差別很大。參考圖4,圖4中虛線表示二體模型分析中第二次變軌前后的軌跡,實線為攝動模型下的軌跡,顯然攝動模型下第二次變軌前后的軌道面變化比二體模型下大幅增加。究其原因,這是因為當大橢圓軌道周期較大導致遠月點高度過大時,地球的攝動影響增強,三體效應導致環月軌道面發生“翹曲”,從而需要修正的軌道面非共面度大幅增加的緣故。
綜合考慮,建議選擇大橢圓軌道周期為2~3天。另外,從分析結果可以看出,環月軌道面和月球逃逸軌道面的夾角較大時(推遲時間返回)采用月地轉移入射三脈沖方案,所需速度增量比夾角較小時(預定時間返回)采用一次或兩次變軌方案多100 m/s左右。但事實上,夾角較大時采用一次或兩次變軌方案所需速度增量遠大于三脈沖方案,例如圖4中環月軌道面和月球逃逸軌道面的夾角約為45°,采用一次或兩次變軌方案時,平面修正所需速度增量的分量高達1200 m/s。所以,在比標稱設計增加100 m/s速度增量可以接受的條件下,由于采用三脈沖方案有助于擴大月地返回窗口,在故障條件下是較好的選擇。

表4 月地轉移入射三脈沖方案大橢圓軌道周期的選擇
值得一提的是,為避免大的軌道面調整導致的過多推進劑消耗,還可以考慮實施月球逃逸機動,繞飛地月拉格朗日點L2,并再次實施逃逸機動返回地球的月地轉移軌道方案。這一方案和三脈沖原理類似,這里不展開討論。
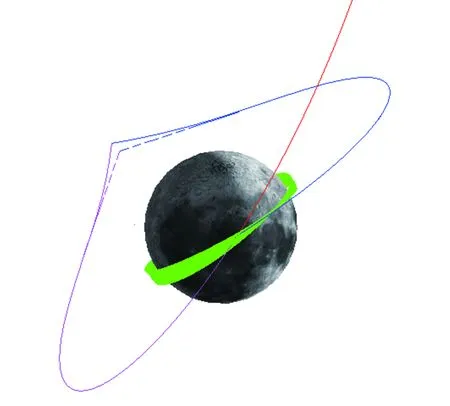
圖4 翹曲現象Fig.4 Warping phenomena
5 低能月地轉移軌道
除了上面討論的常規月地轉移入射軌道方案外,還可以考慮低能月地轉移軌道方案。月球采樣返回任務飛行階段多,出現應急軌道故障的風險較大[10]。例如,如果新型運載火箭發射探測器入軌時偏差較大(特別是半長軸不足),就需要在地月轉移段消耗較多的推進劑來進行軌道修正;類似這樣的軌道故障處置可能導致月地轉移入射前發現推進劑余量已不足以完成預定的月地轉移變軌任務,這種情況下可以考慮采用低能月地轉移軌道方案作為應急軌道預案。低能月地轉移軌道方案充分利用地月和地日拉格郎日點的特性來節省月地轉移能量,月地轉移入射僅需630 m/s左右的速度增量,比前面討論的常規月地轉移入射方案節省150 m/s~200 m/s速度增量,所以在剩余推進劑余量不足以實施常規月地轉移方案時,可以采用低能月地轉移軌道方案來保證月球采樣返回任務的完成。不過,轉移時間需要增加到3~5個月。
圖5展示了月球采樣返回任務軌道設計中的一條典型低能月地轉移軌道。
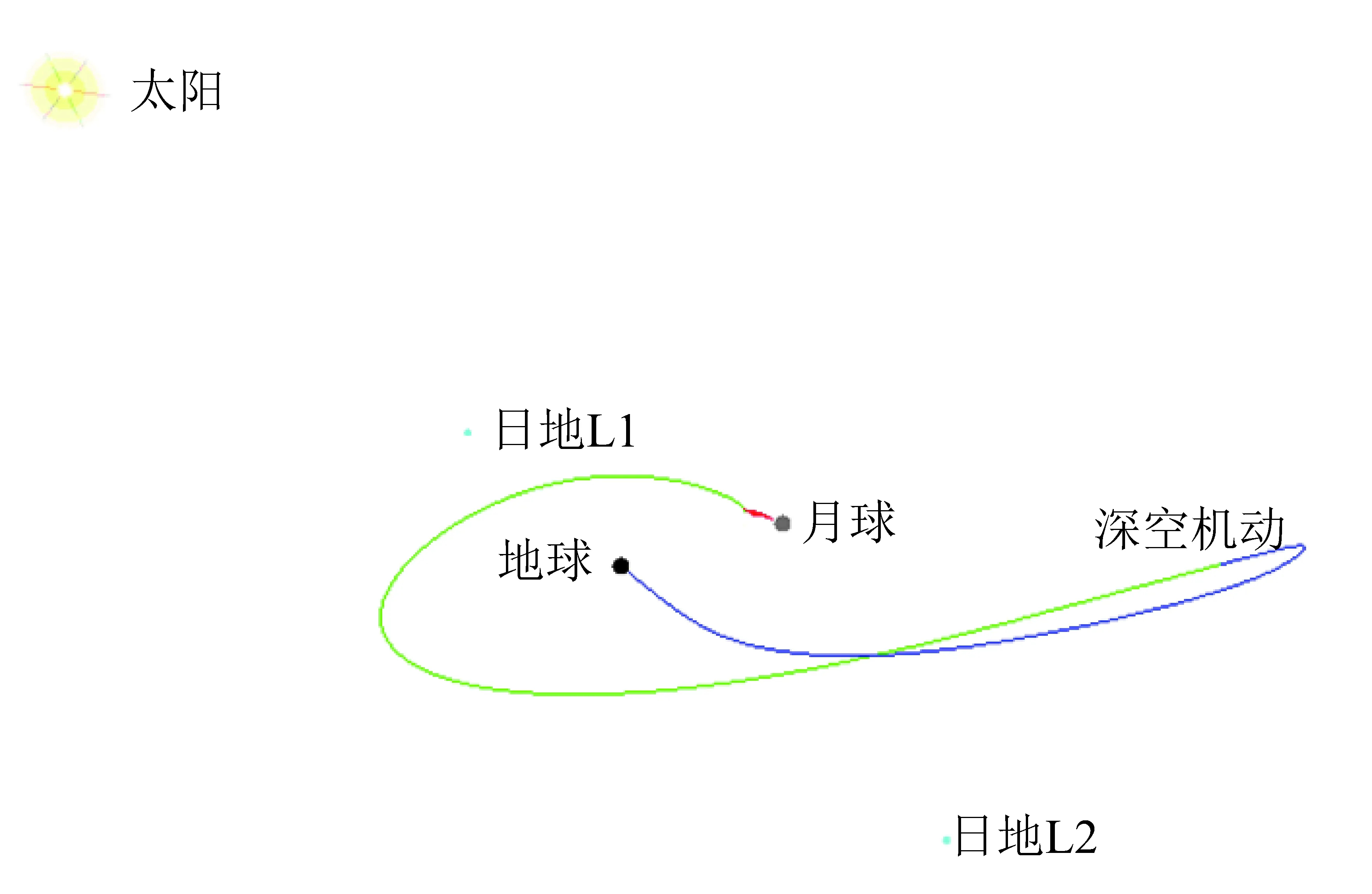
圖5 月地低能轉移軌道示意圖Fig.5 Low energy moon-to-earth transfer
低能月地轉移軌道設計的基本步驟是:①完成月球軌道交會對接和樣品轉移后,探測器在近圓環月軌道上飛行,考慮沿著當前軌道位置的速度方向施加630 m/s左右的速度增量(TEI),對施加速度增量后的軌道進行外推,直到探測器飛出月球影響球到達近地點,如果近地點高度較大(例如大于10 000 km),則放棄考慮在當前環月軌道位置實施TEI,這樣,按照一定時間步長(例如1 min)沿環月軌道逐步搜索若干天,直到找到實施TEI后軌道外推的近地點高度較小的環月軌道位置和時間;②在找到的候選低能月地轉移軌道上的適當位置(例如TEI后第50天)增加一次深空機動(Deep Space Maneuver,DSM),選取深空機動速度增量矢量三個分量和到達再入點時間作為設計量,采用4對4的微分修正精確瞄準理想再入點條件(類似前述常規TEI方案);③綜合考慮速度增量、測控、再入航程等設計約束,對環月軌道TEI時間、深空機動位置進行優化設計,得到低能月地轉移軌道的優化設計。表5給出了低能月地轉移軌道的一個典型設計結果。

表5 低能月地轉移軌道的典型設計結果
6 多方案比較分析
總結上述月地轉移入射策略和軌道方案,得到多方案比較分析結果見表6。顯然,考慮到我國開展月球采樣返回任務的實際工程約束,任務正常實施情況下應采用月地轉移入射兩次變軌策略;如果由于故障原因錯過了預定月地轉移窗口,為避免大的月地轉移入射軌道面修正速度增量,可以考慮采用月地轉移入射三次變軌策略;如果由于故障處置導致月地轉移前推進劑余量不足以完成常規月地轉移入射和返回地球,應采用低能月地轉移軌道。

表6 月地轉移入射多方案比較分析
7 結束語
本文在改進月地轉移入射一次變軌策略優化算法的基礎上,采用基于測控條件分析的月球探測軌道設計方法,針對工程設計中提出的月地轉移入射變軌策略從一脈沖改為兩脈沖的問題進行了研究,給出了月地轉移入射兩脈沖變軌策略的優化算法流程。數值仿真計算結果表明:本文提出的優化算法是有效的,在工程設計中有重要應用價值。
另外,還針對月地轉移入射三脈沖方案和低能月地轉移軌道方案展開了討論,分析表明:在月地轉移入射需要進行大的軌道面調整的情況下采用三脈沖方案可以降低速度增量需求,有助于擴大月地返回窗口,月球采樣返回任務中應用三脈沖方案時大橢圓軌道的適宜周期為2~3天;采用低能月地轉移軌道比常規月地轉移入射方案節省150~200 m/s速度增量,可以在常規方案所需剩余推進劑余量不足的條件下實施月地轉移任務。論文提出的相關軌道方案的工程設計方法可應用于軌道應急預案的制定,是保障我國月球采樣返回任務目標完成必需的關鍵軌道技術。