納型衛星研制關鍵技術
2019-03-06 01:09:20
航天器工程 2019年1期
(清華大學精密儀器系,北京 100084)
納型衛星泛指質量為10千克級的航天器,最早的發射可追溯到20世紀50年代[1-2]。近年來,微機電系統(MEMS)技術的蓬勃發展極大地推動了航天器微型化與高度集成的進程,而納型衛星因其體積功耗小、研發快捷、應用靈活等優勢,展現出廣闊的發展和應用前景[3-4]。當前,納型衛星不但在空間態勢感知、遙感監測、測控通信、科學探測和新技術試驗中發揮著重要的作用,而且已經從單星應用向多元化、高性能、分布式空間系統應用發展[5-6]。因此,以微型化技術和智能技術為核心,以輕量化、低成本與高性能為特征的納型衛星,是目前航天技術發展的重要方向之一[7]。
國內外相繼開展了大量微納型衛星研制和在軌試驗,例如“同步定位、執行、重定向試驗衛星”(SPHERES)[8]、“無線電探索者”(RAX)衛星[9]、“教育衛星”(EduSAT)[10]、“迷你衛星”(FITSAT)[11]及納星1號(NS-1),取得了眾多理論和實踐成果。2015年,長征六號首飛的“一箭二十星”項目,是我國微納型衛星試驗的里程碑事件,將工業部門、商業公司及高校等多家單位研制的衛星成功送入軌道。隨后的長征十一號運載火箭實現了快速響應發射,同樣搭載了納型衛星。包括西北工業大學、哈爾濱工業大學等多所高校參與的QB50計劃,是一項全球性的納型衛星研發活動,再次推動了國內納型衛星技術的發展。
納型衛星具有突出的性能優勢和組網的巨大潛力,在航天活動中發揮著不可替代的作用,具有極高的戰略意義[12-13]。但是,其低成本研制與長期可靠運行之間構成了一對矛盾;微型化的迫切需求與現有空間光機電部組件/分系統的體積功耗水平相互制約;同時,納型衛星的資源限制與遙感、通信、導航等高性能載荷應用[14]之間形成了掣肘。針對上述3項工程問題,本文對多學科優化和總體架構設計、微機電部件原理和研制以及高性能空間載荷應用的3個層次進行分析,提出利用多學科優化結合模塊化設計的低成本衛星研制方法,配合最小系統與即插即用架構,提高衛星在軌運行的可靠性;通過自主研制基于微機電系統技術的星上器/部件,實現在納型衛星平臺上的在軌驗證與應用;針對微納型衛星在空間任務中的相對測量及對地遙感等需求,進行了新型有效載荷的設計及研究。相關研究成果通過成功研制的納星2號(NS-2)得到驗證,并在吉林1號衛星星座、珠海1號衛星星座等80余顆商業衛星,以及探月工程、高分專項等10余個航天器上進行了批量化應用。
1 基于多學科優化的納型衛星平臺研制
相比而言,納型衛星在體積、質量、功耗、成本等方面存在苛刻約束,需要面對長期高性能在軌工作的挑戰。為解決這一問題,在設計過程中,要打破傳統衛星分系統式的設計建造模式,采用涵蓋力、熱、光、電、磁和空間輻照等的多學科綜合優化手段。結合納型衛星多使用高性能商用器件,以提高系統性能、功能密度和降低成本,以及在軌運行時通常以短時高性能需求為主的基本特點,提出了一種全時運行基本功能高可靠和任務期間擴展功能高性能的優化設計方法,建立了以最小系統為核心,以即插即用為手段的納型衛星平臺開放型、擴展式設計理念,見圖1。
注:PCB為印制電路板。
圖1 基于最小系統的衛星平臺結構
Fig.1 Satellite architecture based on the minimum system
本文搭建了航天器分布式設計優化環境系統(SDIDE),利用通用多學科優化設計環境iSIGHT集成各學科分析工具,如STK、Matlab、UG NX、I-DEAS、ANSYS等軟件(如圖2[15]所示)。將不同學科的設計工具集成起來協同工作,通過設計過程的自動化來縮短研制周期,系統在設計方案自動尋優的過程中同時也提高了設計質量。

圖2 SDIDE系統架構Fig.2 System structure of SDIDE
構建基于體裝太陽電池陣及供配電、遙測遙控和射頻一體化的高可靠標準化的最小系統,以擺脫衛星系統對姿態控制、熱控制等的過分依賴,保證其在衛星全生命周期的高可靠工作。在最小系統的基礎上,衛星可擴展高性能星務、姿態軌道控制、有效載荷等分系統。這些子系統不再是單純追求以高等級器件保證系統的高可靠性,而是以任務需求為牽引,通過系統級冗余設計和故障可恢復設計保障高性能任務的執行。衛星發射入軌后,先進行最小系統的遙測遙控,確認正常工作后,再開啟星上計算機、姿態軌道控制與有效載荷等分系統完成任務。當衛星運行出現故障時,則退回最小系統并重新進入衛星啟動的初始化步驟。這樣的設計簡化了測試流程,提高了系統的魯棒性。
為實現衛星綜合電子系統的模塊化設計,使設計流程更為平滑,并與多學科優化方法充分結合,提出一種基于即插即用技術的方法,可實現由能源單元、遙測遙控單元及射頻單元組成的高可靠最小系統。突破傳統通信通道“一對一”的數據傳輸模式,采用通信設備上電自舉識別方法,建立穩定的“一對多”拓撲結構的物理層到系統層鏈路。該方法在NS-2納型衛星任務中完成在軌試驗,實現了硬件接口、衛星功能部件級的即插即用,有效保證了綜合電子系統的應用靈活性和可擴展性,滿足快速研制和空間任務快速響應的需求,能促進納型衛星的標準化設計和開發建造。
基于高可靠最小系統的即插即用衛星平臺,以微機電部件實現微型化高性能的系統擴展,如加入姿態軌道測量與控制分系統、有效載荷分系統等,在納型衛星上實現角秒級的姿態測量和0.05(°)/s的三軸穩定控制,能確保在納型衛星上完成遙感、通信、空間攻防等系列高性能任務,并為編隊飛行、分布式遙感、全球覆蓋等戰略性任務奠定基礎。
基于多學科優化研制的NS-2納型衛星(見圖3[16]),于2015年發射并成功開展了多項新技術試驗,在軌運行時間超過了2年。
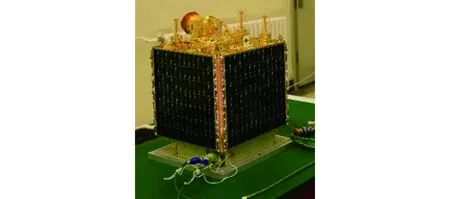
圖3 NS-2納型衛星Fig.3 NS-2 nanosatellite
2 面向空間應用的高性能微機電器/部件技術
納型衛星平臺要求搭載的器件體積小、質量輕、功耗低,以MEMS器件為代表的微機電技術的應用,為航天活動提供了新的可能。針對空間光學敏感器、慣性敏感器及MEMS開關等典型微機電器/部件,開展原理研究、樣機試制與搭載測試,成功實現在軌應用。
2.1 空間高性能低功耗MEMS陀螺
本文設計一種帶應力抑制結構的MEMS陀螺,結合特有的熱平衡設計及振動隔離技術,相比傳統陀螺耐受振動和沖擊影響的能力提高了30倍,同時能有效降低慣性測量系統的串擾噪聲;提出了基于IP核的全數字化測控硅基MEMS陀螺技術,相比模擬電路溫度穩定性提高一個數量級以上,可實現高性能的內部復雜控制算法,針對該陀螺研究的標度因數自補償技術,可使標度因數全溫變化減小到0.1%[17]。上述設計面向空間熱應力、發射高沖擊、標定高精度等衛星平臺對MEMS陀螺的需求開展,相比常規產品更具有在軌應用潛力。

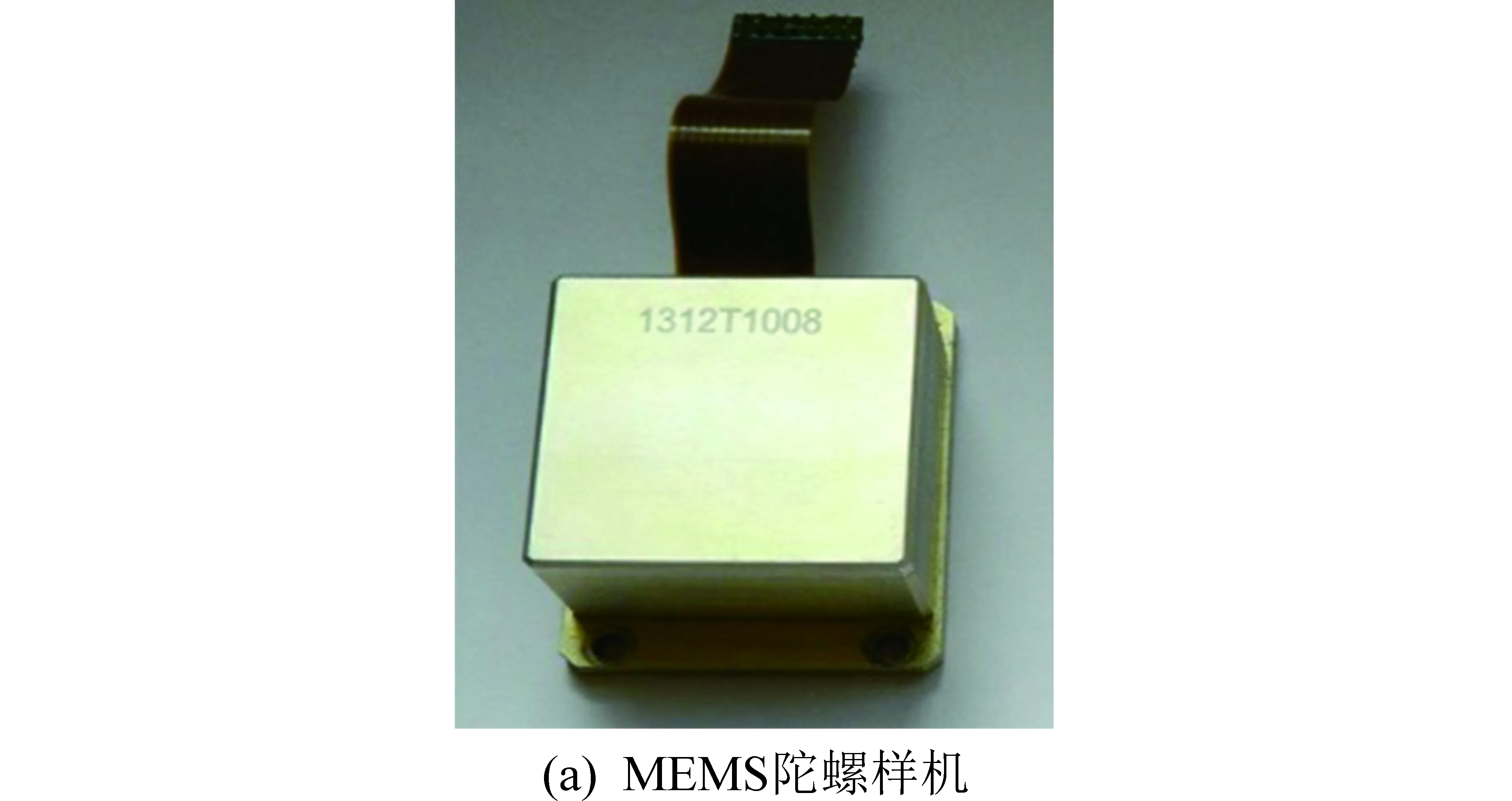
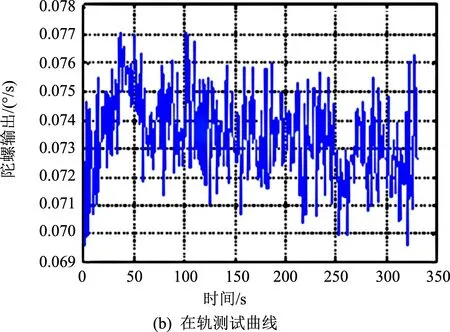
圖4 硅基MEMS陀螺樣機及在軌測試曲線
2.2 MEMS扭擺諧振式磁強計
本文提出并實現了一種新的具有對稱式結構及多層線圈的高靈敏度扭擺諧振式磁強計,通過折疊梁結構、雙層激勵線圈等設計提高了系統靈敏度及品質因數(Q值)。研制時突破了基于系統集成的雙層結構實現工藝,采用聚酰亞胺作為絕緣層,解決了硅-玻璃鍵合后淀積氮化硅等一系列工藝難題。基于差動電容放大、高頻信號調制及同步解調原理,研制完成高精度信號檢測電路;基于自激振蕩和線圈反饋的雙重閉環,實現大諧振頻率范圍內的鎖頻驅動,以減小靈敏度溫漂,提高線性度和穩定性,降低功耗。
圖5[18]為研制的MEMS磁強計工程樣片,基于此樣片研制了MEMS磁強計工程樣機,質量44 g,體積42 mm×42 mm×20 mm,功耗0.35 W。圖6(a)[19]為樣機地面測試曲線,測試結果顯示:磁場分辨率優于30 nT,量程大于30 μT,靈敏度優于400 mV/μT。該樣機成功在NS-2納型衛星上開展了搭載試驗,與星上姿態控制系統中的商用磁強計測量數據對比分析結果表明,變化趨勢一致(見圖6(b)),相關度達0.996 6,功能滿足空間應用要求。
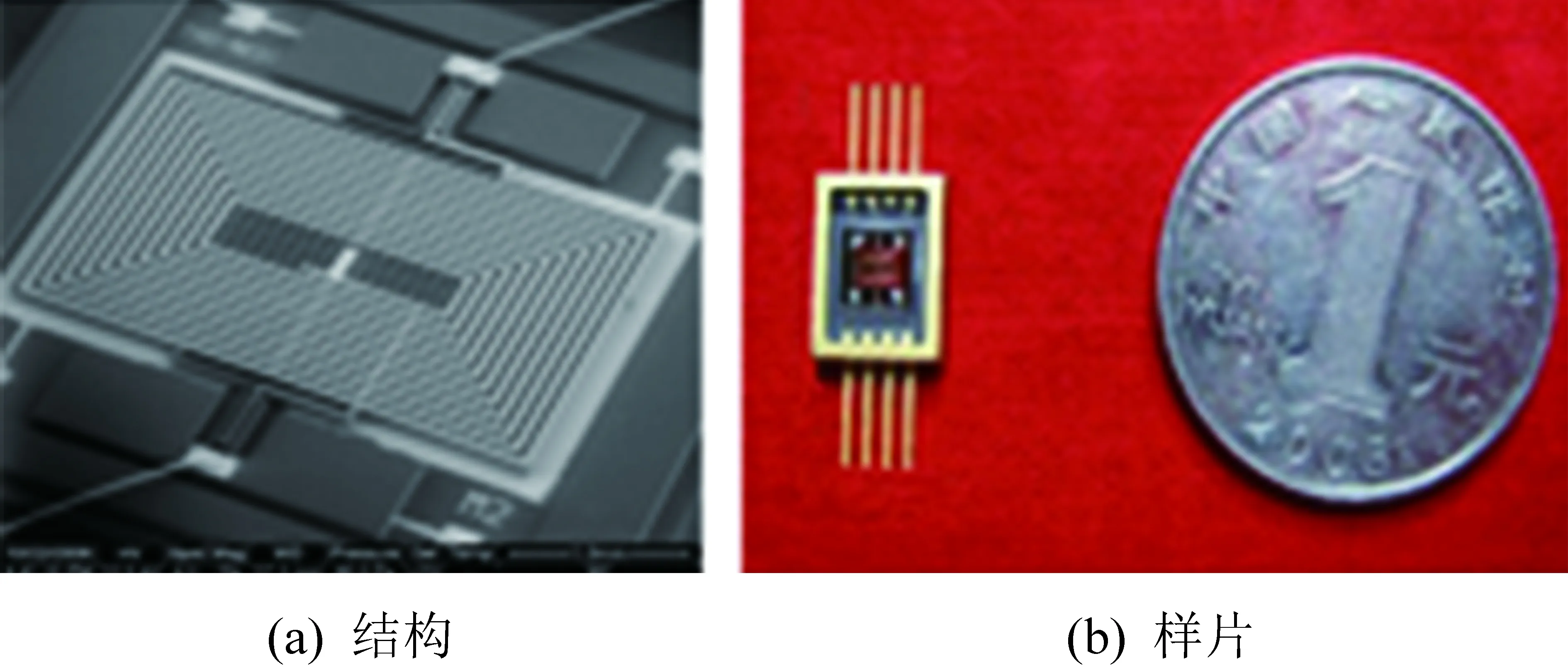
圖5 MEMS磁強計結構及樣片Fig.5 Structure and sample of MEMS magnetometer

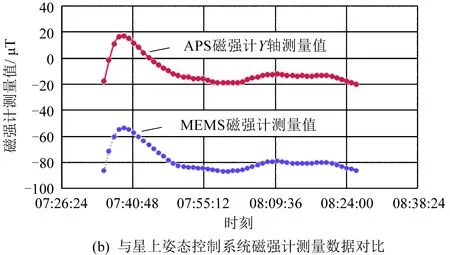
注:APS為主動像素傳感器。圖6 MEMS磁強計樣機測試結果Fig.6 Test results of MEMS magnetometer prototype
2.3 高性能納/皮型光學敏感器
高精度的光學姿態測量技術是衛星提升性能的核心和關鍵,決定著衛星的能力和技術水平。太陽敏感器、星敏感器等傳統光學姿態敏感器體積尺寸比較大,很難在納型衛星上應用。針對光學成像視場和分辨率相互制約的難題,本文提出在單一感光探測器(感光邊長為ld)上實現多視場(FOV)n編碼復用的高精度大視場成像原理,設計集256個視場編碼孔徑(掩膜層相鄰視場的間距為dm,單個視場寬度為lm)與16 384個目標成像孔徑于一體的MEMS光線調制與目標識別方法(見圖7[20]),解決了120°大視場角下空間目標角秒級定位的難題;針對空間多目標高分辨率成像與高更新率讀出無法兼容的難題,提出一種卷簾式多目標成像與姿態測量方法(見圖8),通過每顆恒星在探測器上的成像位置和時間(xk,yk,Tk)的關系來進行姿態遞推,每當獲取第k+1個星點,即獲得了第k+1個觀測矢量wk+1及其對應恒星的參考矢量vk+1,再結合上一個(第k個)星點所獲取的姿態四元數及角速率的信息狀態(Kk/k,wk),實現最優的當前姿態和角速率狀態的估計(Kk+1/k+1,wk+1),從而達到姿態測量更新率提升10倍以上(1000 Hz)。研制的太陽敏感器和星敏感器(見圖9)質量皆小于100 g,精度均能達到角秒水平。
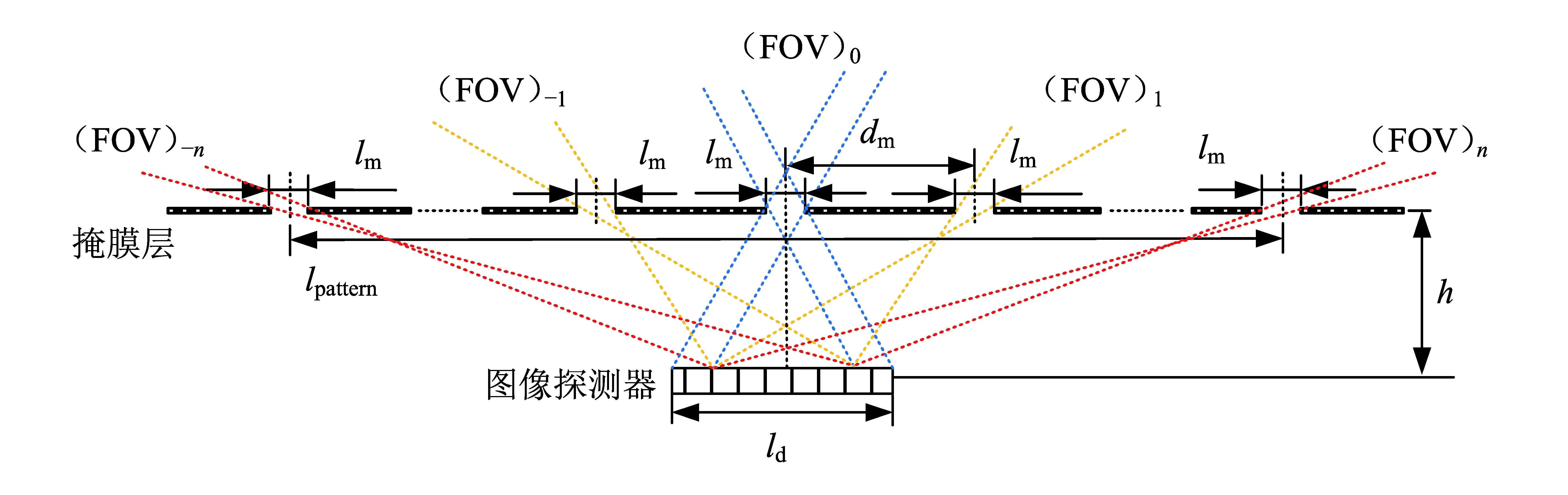
注:n為視場編號;lpattern為光線調制器上孔徑區域的總長度;h為光線調制器與圖像探測器的距離。
圖7 MEMS光線調制與目標識別方法原理
Fig.7 Principle of MEME light modulation and target identification method
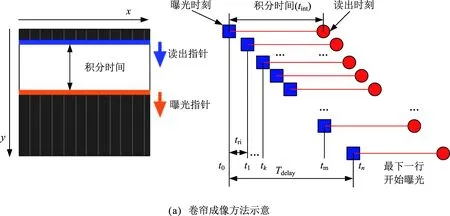

圖9 原理實現與產品應用Fig.9 Principle implementations and production applications
2.4 低功耗高可靠空間應用MEMS開關
作為電氣系統中最基本的一類重要器件,開關在各類航天器,特別是衛星系統中發揮著重要的功能和作用。MEMS開關,尤其是靜電驅動MEMS開關優異的性能,能夠很好地滿足衛星平臺與載荷等各分系統模塊對大量開關器件提出的體積小、質量輕、功耗低和可靠性等需求。本文通過拓撲優化等方法對MEMS開關器件的驅動電極進行綜合優化設計,提高其驅動力,研制了具有驅動力增強特性的靜電驅動MEMS開關器件,解決了衛星總線標準電壓無法可靠驅動MEMS開關的難題;同時,通過低剛度微結構緩沖MEMS開關的機械彈跳,可基本消除開關電極觸點的機械彈跳對其電學性能的負面影響。研制的MEMS開關器件結構及樣片如圖10[21]所示,封裝后質量為3 g,驅動功耗為0.1 nW,斷開電阻優于100 GΩ,耐壓指標優于28 V。在額定電流100 mA時,其電學壽命超過了10萬次(見圖11[22])。

圖10 MEMS開關器件結構及樣片Fig.10 Structure and sample of MEMS switch
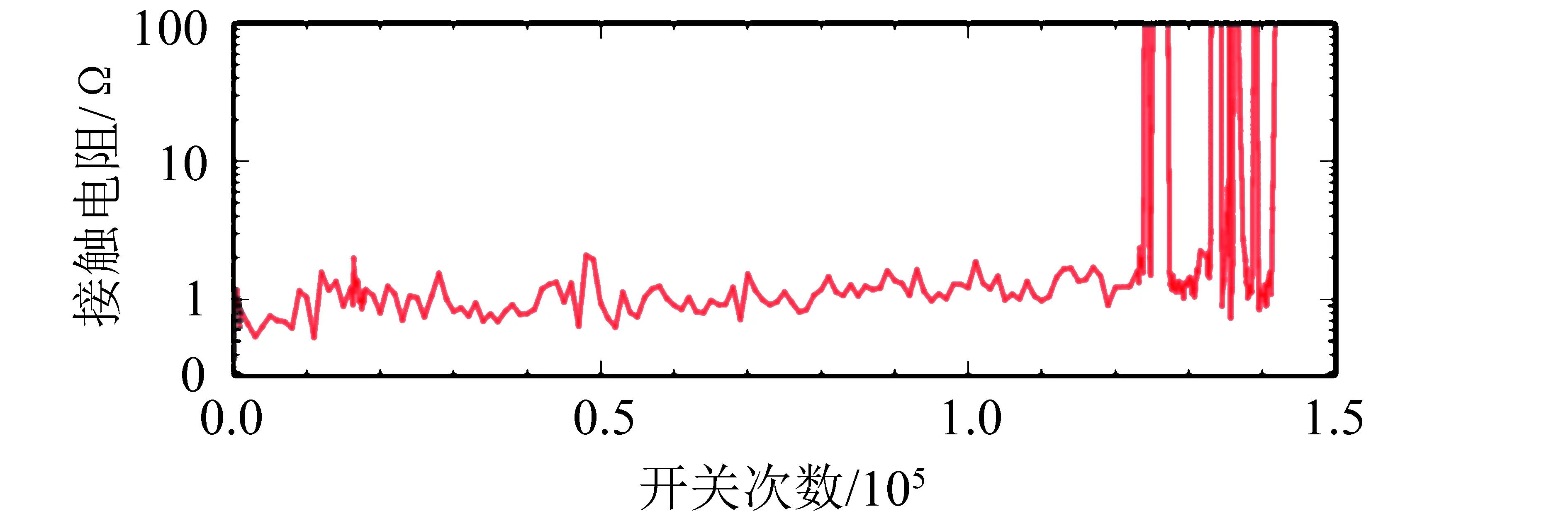
圖11 MEMS開關100 mA工作電流壽命測試曲線Fig.11 Lifetime test curve of MEMS switch under working current of 100mA
3 適用于納型衛星平臺搭載的有效載荷技術
3.1 空間MEMS掃描鏡
針對空間目標探測的應用需求,本文提出一種雙壓電差分驅動杠桿式MEMS掃描鏡結構(如圖12[23]所示),通過并聯電感阻抗匹配降低雙頻驅動壓電陶瓷功耗的方法,實現MEMS掃描鏡在不高于5 V驅動電壓下的大掃描角驅動。針對微型二維掃描鏡扭轉和彎曲運動角度測量耦合問題,建立微型二維掃描鏡在二維運動時柔性梁的力學分析模型,提出一種基于壓阻傳感器的偏轉角解耦測量方法,分別實現微型二維掃描鏡在扭轉和彎曲2個方向上偏轉角的高精度測量。針對高應力、循環載荷的諧振式MEMS掃描鏡疲勞失效問題,設計一種光楔式放大MEMS掃描鏡光學掃描角的封裝結構,在同樣光學掃描角情況下,可有效降低掃描鏡機械擺角,從而降低器件實際工作應力,有利于提高MEMS掃描鏡的壽命。
基于MEMS掃描鏡,設計一種微型化的激光掃描探測系統(如圖13所示),采用粗精測尺相結合的相位式激光測距法,實現對空間非合作目標的方位與距離的探測與測量。研制的微型掃描探測系統樣機質量313 g,功耗2.85 W。其測試及分析表明:掃描角度達41.2°×41.0°,角度測量精度最高可優于0.1°,1 km以內測距精度達3.1 m。
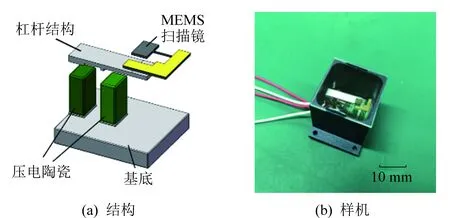
圖12 杠桿式MEMS掃描鏡結構及樣機Fig.12 Structure and prototype of lever MEMS scanning mirror
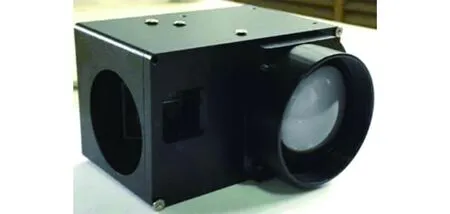
圖13 微型掃描探測系統樣機Fig.13 Prototype of micro scanning detection system
3.2 一體化智能載荷
面向納型衛星光學遙感等任務需求,本文提出微納光學姿態敏感器與遙感相機一體化的智能載荷技術(見圖14)。利用十二等星的提取識別和亞秒級恒星探測與姿態測量技術,開展星敏感器與遙感相機同時星空成像與在軌定位試驗。
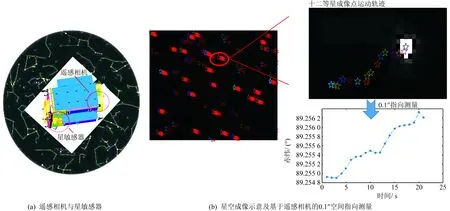
圖14 星敏感器與遙感相機同時星空成像識別技術及一體化標定Fig.14 Imaging identification technology and integrated calibration based on star of star sensor and remote sensing camera
在傳統的應用中,多采用星敏感器姿態測量與相機地面靶標場測試相結合的標定方式。地面靶標場受到地理位置、大氣環境的影響比較嚴重,同時,衛星也需要進行側擺機動等測試,測試時間少,效果很難得到保證。本文通過對在軌飛行過程中智能載荷的工作特點進行分析,發現利用衛星的姿態調整,使星敏感器和遙感相機同時對背景星空成像,可實現兩者的一體化背景星空的內外方元素自主標定。通過理論分析和試驗驗證,成功實現了遙感成像系統焦距、主點、畸變等的亞角秒級自標定,以及遙感相機自身與星敏感器的外方元素角秒級互標定,解決了長期以來一直無法擺脫地面靶標系統的難題,使納型遙感成像系統的定位水平提升了1個數量級,達到10米級水平。
4 結束語
本文利用微機電系統、集成電路等領域的最新成果以及設計理念與方法,通過研究新型微型化功能器/部件,探索以MEMS技術為代表的微納型技術在航天領域的應用。同時,自主發展以納型衛星為代表的微型航天器及其應用技術,開展納型衛星的設計、制造、測試技術研究。針對資源嚴重受限條件下納型衛星高性能應用需求,基于低功耗高性能微機電器/部件,開展基于多學科優化的納型衛星平臺研制,并實現了在軌高效運行,為納型衛星的高集成度和輕量化打下基礎,推動了納型衛星走上遙感成像、通信導航等高精度主戰場的進程。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17