電磁-壓電復合式機械能量收集器
2019-02-22 04:59:32楊子楊崔丹鳳穆繼亮丑修建
測試技術學報 2019年1期
錢 鑠,楊子楊,崔丹鳳,何 劍,穆繼亮,丑修建
(中北大學 電子測試技術重點實驗室,山西 太原 030051)
隨著現代電子技術的發展,電路系統變的越來越小型化、集成化,促進了物聯網及可穿戴智能終端蓬勃發展,使得智能終端成為了我們生活中不可獲缺的一部分. 現在這些智能終端設備供電方式主要采用聚合物電池,但是聚合物電池有續航時間短、成本高、環境污染大等缺點,嚴重阻礙了智能終端器件的發展. 因此,尋找一種新的高效能量供給方式是十分必要和迫切的[1-3].
在我們的生活中,機械能廣泛分布且形式多樣,如:人體運動,機械振動等,采集機械振動能量轉換成電能為智能終端供電是一種行之有效的辦法. 在機械能采集的研究中,已發表的多種能量采集器采用了壓電、電磁、摩擦等多種換能原理,但這些發表的能量采集器在實際應用中都有其不可避免的缺點:① 摩擦發電機輸出功率低,轉換的機械能不足以支撐電路系統工作[4-8]; ② 采集方式單一,導致大量機械能以熱能和機械形變的形式被耗散[9]; ③ 彈簧和懸梁結構機械性能差,在長時間的工作后容易產生機械疲勞甚至器件損壞[10,11]; ④ 結構笨重,器件自重和體積偏大,使用不便[12].
針對以上問題,本文提出一種基于磁懸浮結構的復合式能量采集器,該能量采集器電氣性能優異、設計輕便、靈敏度高. 能量采集器采用對稱設計,集成了4組能量采集單元,內部支撐件全部采用3D打印加工,整體尺寸為Φ47*27 mm,重量僅有80 g. 結構核心感應部件是一塊環形磁鐵,在周圍3個磁柱的作用下處于懸浮狀態.
1 設計及原理
本文中提出的復合式能量收集器如圖1(a)所示,以磁懸浮結構作為敏感單元,集成了電磁發電機(簡稱:EMG)和壓電發電機(簡稱:PEG)兩種換能方式. 磁懸浮結構是以環形磁鐵作為懸浮磁鐵,在其周圍均勻排布3個磁柱,在磁場力的相互作用下中間的環形磁鐵會懸浮起來.
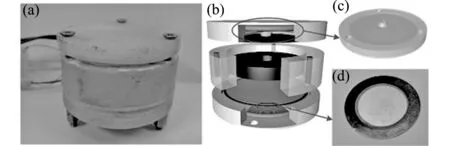
圖 1 (a)復合式能量采集器實物圖; (b)復合式能量采集器示意圖; (c)異性支架圖; (d)壓電晶片Fig.1 (a) Figure of hybrid micro power generator;(b) Rendering of hybrid micro power generator; (c) Straight stents; (d) Piezoelectric wafer
在懸浮結構上下兩側各有一組異形支架,支架一側有圓臺形凸起,如圖 1(c) 所示,壓電陶瓷片固定于凸起頂部; 支架另一側為一個空腔,空腔內部放置有一組銅線圈,如圖 1(b) 所示. 其中壓電片采用PZT壓電陶瓷晶片,銅線圈使用70 μm 漆包銅線纏繞4 000砸.
復合式能量采集器以磁懸浮結構為基礎,依靠環形懸浮磁鐵感應外部振動. 在外部振動激勵作用下,懸浮的環形磁鐵脫離平衡位置,在磁場力的作用下逐漸回復到初始狀態. 在這一過程中,磁鐵會上下往復運動,電磁感應單元和壓電單元會產生感應電勢. 在磁鐵往復運動過程中銅線圈內磁場強度發生變化,基于法拉第電磁感應原理,銅線圈內產生感應電動勢. 隨著外部振動激勵的增強,懸浮磁鐵與結構內部上下位置的壓電晶片發生接觸,壓電發電單元被喚醒,磁鐵撞擊壓電片使其發生形變,由于壓電片的正壓電效應,壓電片上下電極之間會產生感應電勢. 如圖 2 所示,當懸浮磁鐵由于外部激勵作用向下運動時,通過上下兩組銅線圈的磁感應強度發生改變,產生方向相反的感應電動勢; 當磁鐵與底部的壓電片接觸后,壓電片產生形變,上下電極間產生感應電勢. 磁鐵到達底部后開始向上運動,此時銅線圈內產生的感應電動勢恰好相反,當磁鐵運動到頂部撞擊壓電片時,產生感應電動勢. 在磁鐵上下往復運動過程中,電磁發電機兩組線圈同時工作,壓電發電機兩個壓電片交替工作.
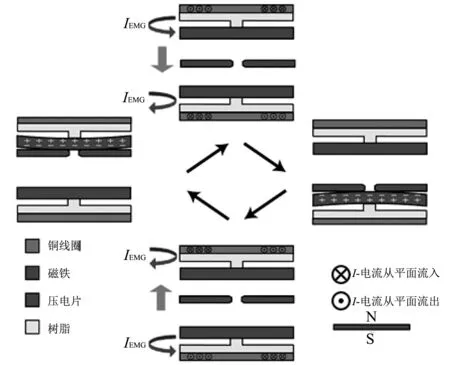
圖 2 復合式能量采集器工作原理示意圖Fig.2 The working principle of the composite energy collector
2 結果與分析
為研究復合式能量采集器輸出特點,實驗測試中使用JZK-10模態激振器模擬機械振動對采集器進行了測試. 在外部振動激勵下,復合能量采集器中的電磁發電單元和壓電發電單元有各自不同的輸出特性. 在振動測試參數設置為頻率20 Hz,位移2.5 mm的條件下,對能量采集器的輸出特性進行了測試和分析. (結構底部發電單元分別記為EMG1,PEG1; 結構頂部發電單元分別記為EMG2,PEG2)
圖 3 給出了電磁發電單元輸出曲線. 從圖 3 中可以看出:EMG1的短路電流為7 mA,開路電壓為8.1 V; EMG2的短路電流為4.5 mA,開路電壓為 4.2 V; 從圖 3(e), 圖 3(f)中可以看出:電磁發電單元最優匹配阻抗為1 kΩ,在1 kΩ的外接負載下,EMG1和EMG2的輸出功率分別達到了42 mW和35 mW; 觀察圖3(a)~圖 3(d)可以發現:EMG1和EMG2的輸出性能并不完全一致,這是由于重力對懸浮磁鐵的影響造成的. 由于重力的作用,在磁鐵向下運動時,其所受的力為 F+mg; 當磁鐵向上運動時,其所受的力是 F-mg. 在法拉第電磁感應原理中,感應電動勢E和磁通量的變化率φ成正比關系,即:E∝(dφ/dt),而且由于重力的影響,環形磁鐵懸浮位置略低于結構的幾何中心. 由于上述重力的影響,使懸浮磁鐵在不同運動方向上其加速度和加速距離都有較大的差異,由此造成了兩個電磁發電單元的輸出性能差異.
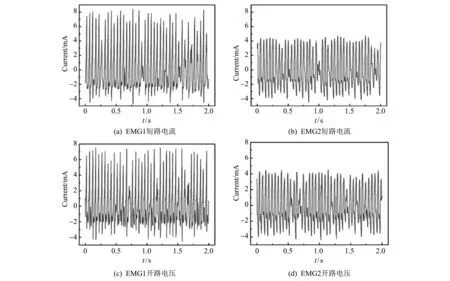
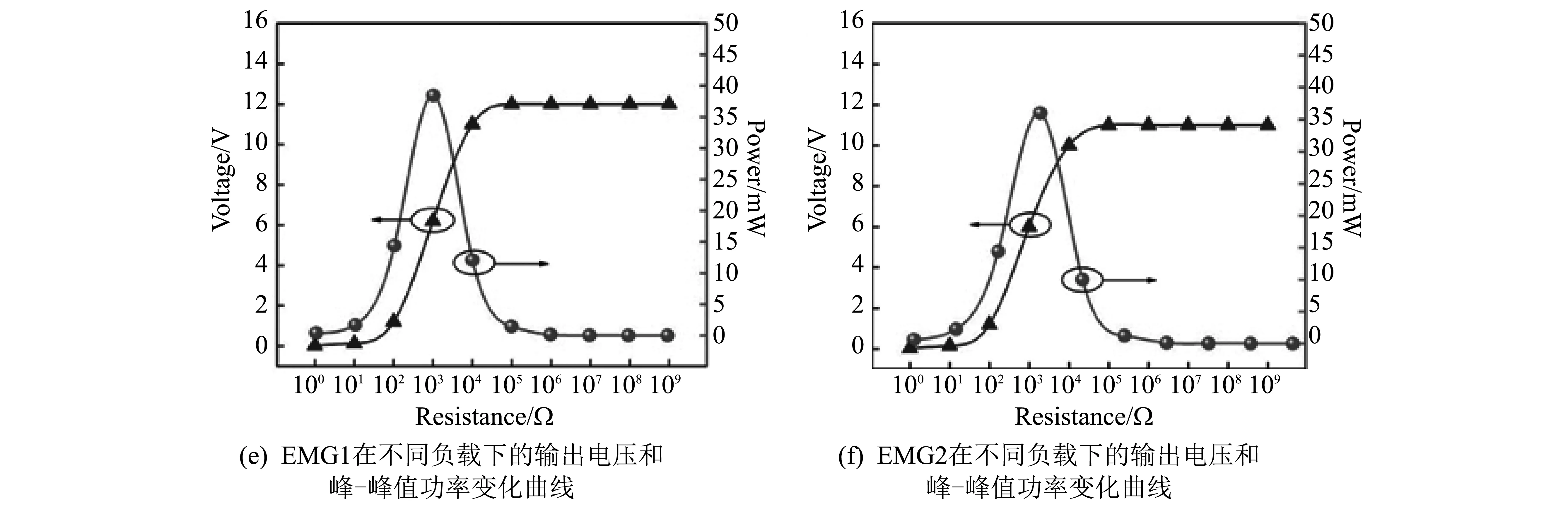
圖 3 電磁單元輸出性能Fig.3 Output performance of electromagnetic unit
圖 4 給出了壓電發電單元的輸出性能曲線,包括開路電壓、短路電流及阻抗曲線. 從圖 4 中可以看出:PEG1的短路電流為3 mA,開路電壓為60 V; PEG2的短路電流為2 mA,開路電壓為40 V. 壓電發電單元最優匹配阻抗為10 kΩ,在10 kΩ的外接負載下,PEG1和PEG2的輸出功率分別達到了142 mW和140 mW. 從圖 4 中可以看出: 壓電單元的輸出波形一致性較差,開路電壓峰值具有隨機性. 這主要是因為壓電材料的自身特性和懸浮結構特點共同造成的,由于環形磁鐵處于懸浮狀態,僅受到磁場力和重力作用,是一個極易被破壞的平衡狀態,由于在測試過程中固定器件產生的偏差等原因,造成了運動過程中磁鐵與壓電單元接觸時角度和力度具有一定的不確定性,導致了壓電片在每次撞擊時產生的形變有較大差別. 由于重力的影響,在環形磁鐵與上下兩片壓電晶片接觸時產生的壓力不同,從而造成PEG1和PEG2的輸出性能有明顯的差異.
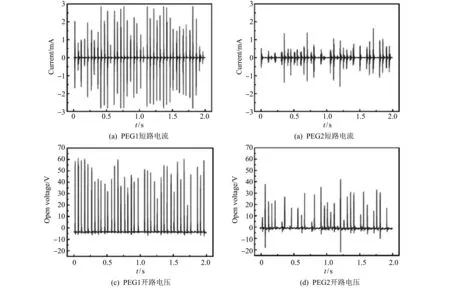
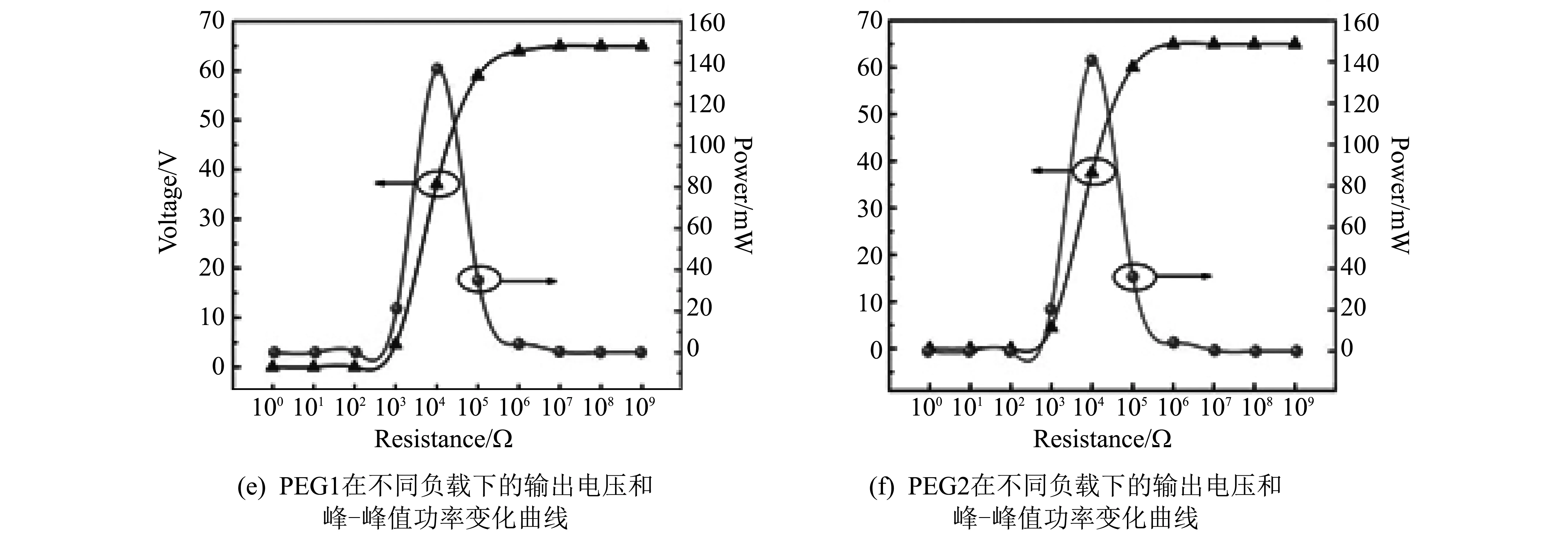
圖 4 壓電單元的輸出特性Fig.4 The output characteristics of piezoelectric units
從電磁發電單元和壓電發電單元的阻抗曲線中可以看出:兩種不同的換能方式具有不同的最優匹配阻抗. 電磁發電單元的最大功率點負載為1 kΩ,這一阻抗值是和銅線圈內阻直接相關的,壓電發電單元的最大功率點負載為10 kΩ,這是由壓電材料自身的特性決定的[13]. 兩種發電方式最大功率點負載值具有近10倍的差距,所以能量采集器經過復合后系統總的輸出功率不能是簡單的線性疊加,復合系統輸出功率需要用單位時間內的輸出能量表征. 如圖 5 所示,在一個周期內EMG和PEG輸出的能量分別是:423.56 μJ, 350.61 μJ, 63.19 μJ,48.29 μJ. 根據公式P=W/t,可以計算或者復合能量采集器平均輸出功率為17.71 mW.
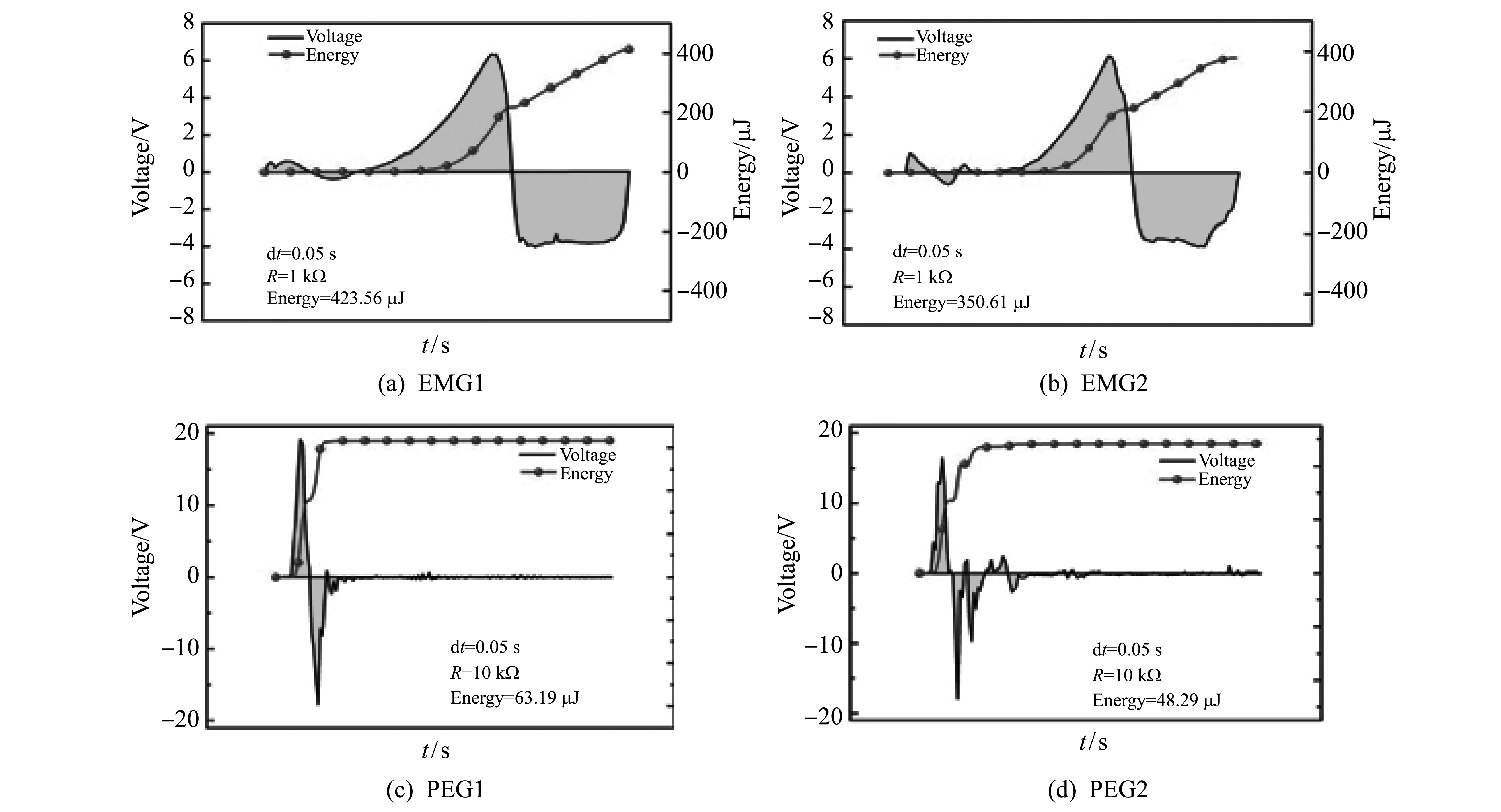
圖 5 4組發電單元在一個周期的能量輸出圖Fig.5 Energy output of four sets of power generation units in one cycle
從以上分析中可以看出:復合能量采集輸出的電壓和電流具有很大的波動性,而且其信號都為交流信號. 對于小型電子設備來說,需要直流且穩定的信號來供給電能,且太高的電壓會對器件造成損壞,因此需要一種器件將復合能量采集器的信號轉換為低壓、直流、連續的信號輸出. 利用一種儲能裝置接入能量采集器與耗能器件,即可滿足以上要求,這種儲能元件有電容或者鋰電池[14,15]. 在實驗中使用整流橋和電容接入能量采集器和耗能器件之間,能量采集器采集的電能先經過電容存儲后再為耗能器件供電,如圖6(b) 所示. 圖6(c)給出了4組發電單元在不同的組合方式下對1 000 μF電容充電時,電容兩端電壓變化曲線,從中可以看出:復合后的充電速率要明顯高于單個發電單元的充電速率,這表明單位時間內更多的能量被輸出和存儲.
在電子工程應用中,電容存儲的能量
式中:W表示能量;C表示電容值;U表示電容兩端的電壓[16]. 根據能量和時間關系可以計算出不同組合對電容充電的功率,如表 1 所示. 從表 1 中可以看到能量采集器4個單元的充電功率分別為75.79 μW,70.20 μW,57.24 μW,33.90 μW,能量采集器復合后對電容充電的功率為110.39 μW. 根據以上數據可以計算能量采集器復合后衰減系數為53.45%.
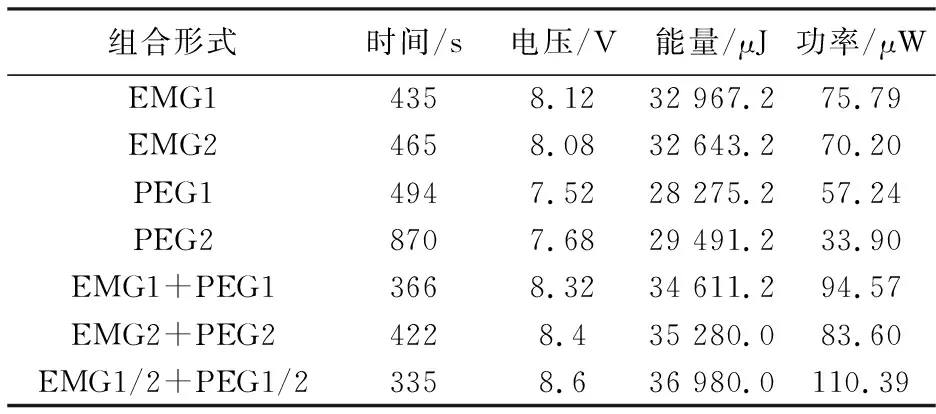
表 1 不同組合形式對電容的充電功率
圖 7 是一個自供電溫度傳感系統,實驗中將復合能量采集器固定于激振臺上,4組能量采集單元經過整流后接入電容器,電容器對能量進行存儲后對溫度傳感器進行供電[17,18].
在振動幾秒后,溫度傳感器開始工作,顯示屏上顯示當前環境溫度值為20.5 ℃.
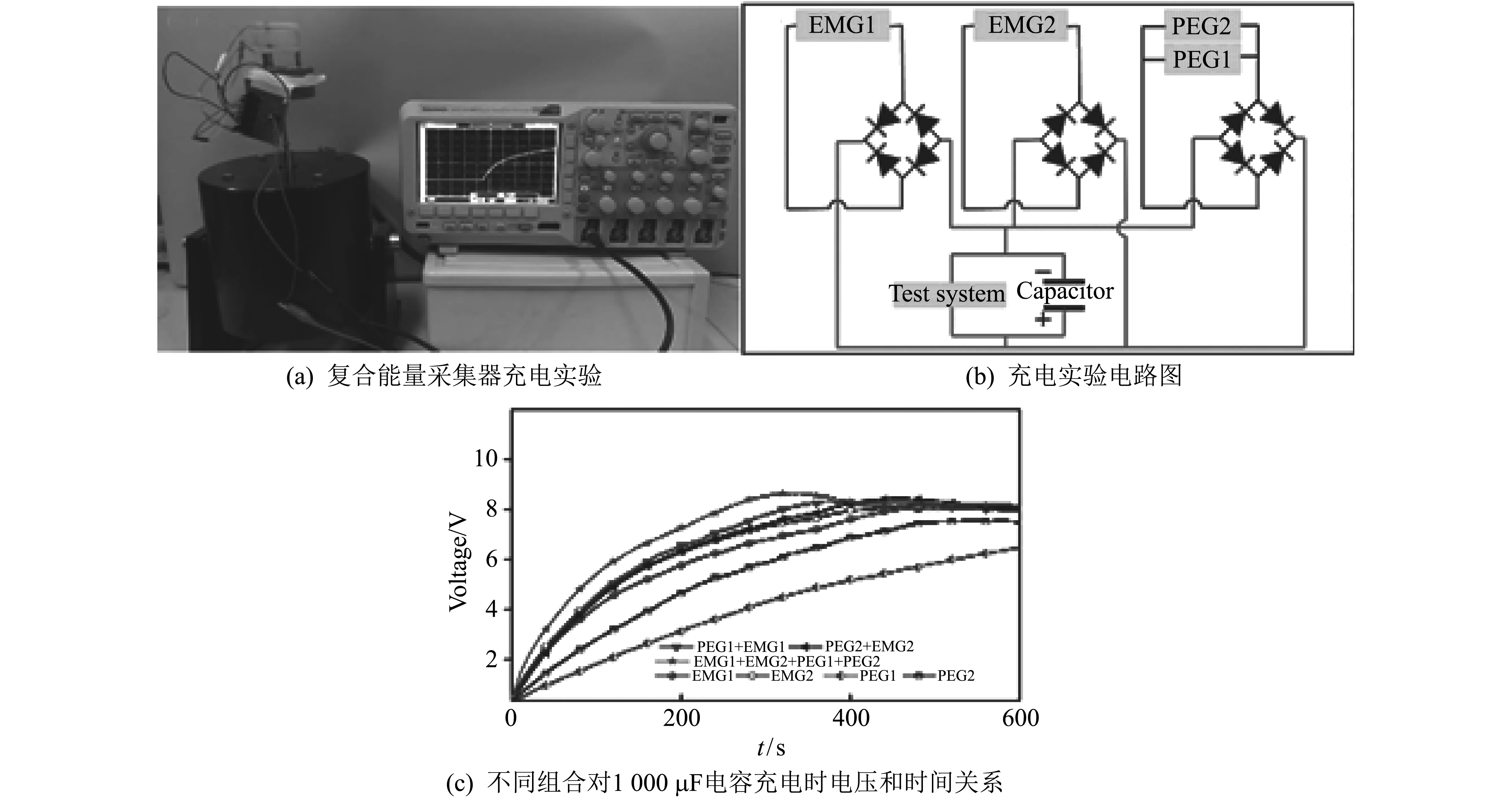
圖 6 復合充電實驗Fig.6 Composite charge experiment
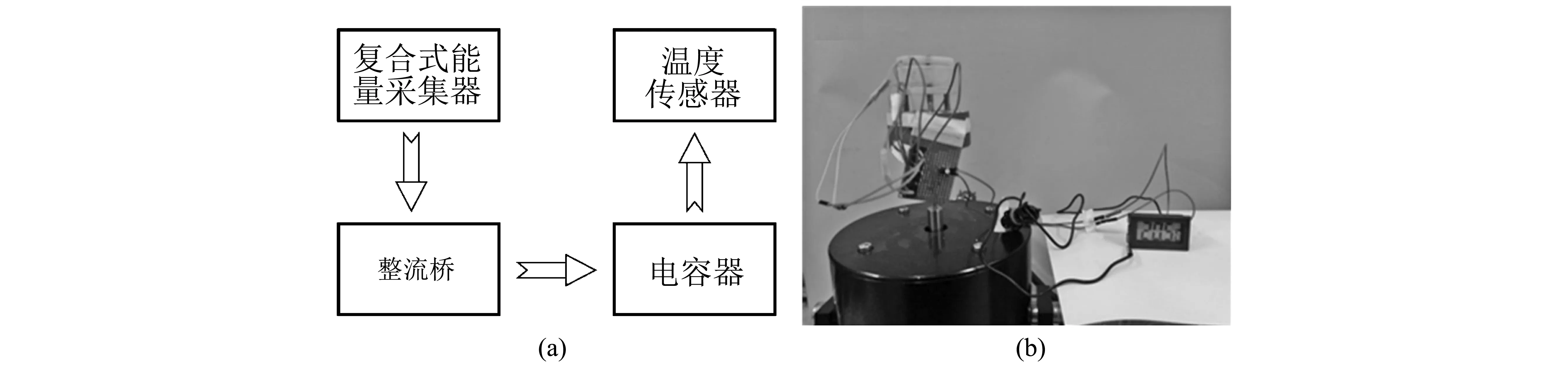
圖 7 能量采集器驅動溫度傳感器Fig.7 The temperature sensor is driven by the energy collector
3 結 論
實驗證明:復合式能量采集器可以有效地將機械能轉化為電能,并可以為數顯溫度傳感器提供工作所需電能. 復合能量采集器以磁懸浮結構作為器件核心單元,采用對稱設計,在有限的空間內集成了4組換能單元. 多組能量采集單元的集成實現了器件更高效的能量采集. 復合式能量采集器中電磁單元在1 kΩ的外接負載下輸出功率分別為42 mW,35 mW; 壓電單元在10 kΩ 的外接負載下輸出功率分別為142 mW,140 mW. 系統一個周期內總的輸出能量為885.65 μJ,平均輸出功率為17.713 mW. 經過整流給電容充電時,EMG+PEG的組合充電速率最快,充電功率達到110.39 mW. 通過對電容充電功率的計算分析后,復合系統衰減系數為53.45%. 復合式能量采集器可以驅動溫度傳感器工作,測量環境溫度. 該器件還具有體積小重量輕的特點,體積為Φ48 mm*27 mm,重量僅為80 g. 本文設計的復合能量采集器是一種新型的能量采集結構,在傳感監測系統中具有一定的應用前景.