拖拉機(jī)后懸掛橫向位姿調(diào)整的模糊PID 控制
2019-02-21 14:25:52邵明璽江秋博張延安杜岳峰楊后富
農(nóng)業(yè)工程學(xué)報(bào) 2019年21期
邵明璽,辛 喆,江秋博,張延安,杜岳峰,楊后富
(1. 中國農(nóng)業(yè)大學(xué)工學(xué)院,北京 100083; 2. 濰坊科技學(xué)院,濰坊 262700)
0 引 言
作為糧食、油料的主要產(chǎn)地,中國丘陵山區(qū)的面積占全國土地資源的69%,但適宜丘陵山區(qū)的機(jī)具匱乏,嚴(yán)重制約著這些地區(qū)農(nóng)業(yè)機(jī)械化的發(fā)展[1-2]。丘陵山地的坡度多為6°~15°,拖拉機(jī)在作業(yè)時(shí)容易發(fā)生側(cè)翻以及耕深不均勻的問題,影響作業(yè)效率和農(nóng)作物的生長。為達(dá)到與地形相適應(yīng)的目的,丘陵山地拖拉機(jī)需要具備車身調(diào)平及農(nóng)具橫向位姿調(diào)整功能。在車身調(diào)平方面,國外研究較多,技術(shù)水平較高[3-6],但對于農(nóng)具的橫向位姿調(diào)整研究明顯不足。對于中國耕地現(xiàn)狀而言,亟需具有橫向位姿可調(diào)的山地丘陵拖拉機(jī)滿足我國農(nóng)業(yè)生產(chǎn)需求。
基于中國農(nóng)業(yè)生產(chǎn)的耕地現(xiàn)狀以及中國農(nóng)機(jī)的發(fā)展水平,中國制定的十三五重點(diǎn)研究專項(xiàng),專門設(shè)立了丘陵山地拖拉機(jī)研究專項(xiàng),拖拉機(jī)后懸掛橫向位姿調(diào)整技術(shù)逐漸被國內(nèi)學(xué)者重視起來,并迅速進(jìn)展。鄒愛民[7]對丘陵山地拖拉機(jī)后懸掛結(jié)構(gòu)、后懸掛液壓系統(tǒng)及后懸掛電液控制系統(tǒng)的具體應(yīng)用進(jìn)行了重點(diǎn)分析,但對于后懸掛姿態(tài)調(diào)整模式及其控制未做深入研究。周浩等[8]設(shè)計(jì)了拖拉機(jī)懸掛旋耕機(jī)自動(dòng)調(diào)平控制系統(tǒng), 通過試驗(yàn)驗(yàn)證了具有自動(dòng)調(diào)平控制系統(tǒng)的旋耕機(jī),作業(yè)后地表橫向平整度顯著提高, 旋耕效果更加理想, 耕深更加穩(wěn)定。劉林[9]以GDZ-150 型履帶式旋耕拖拉機(jī)作為研究平臺,研究了基于拖拉機(jī)三點(diǎn)懸掛的耕作機(jī)具調(diào)平系統(tǒng)。浙江師范大學(xué)蔣俊等[10]對丘陵山地拖拉機(jī)的電控液壓懸掛系統(tǒng)的運(yùn)行機(jī)理與控制方法進(jìn)行了分析,在定負(fù)載和變負(fù)載2 種典型工況下進(jìn)行了仿真分析。胡煉等[11]設(shè)計(jì)了—種農(nóng)機(jī)具自動(dòng)調(diào)平控制系統(tǒng),采用了卡爾曼濾波算法,通過試驗(yàn)驗(yàn)證了調(diào)平控制算法的可靠性,實(shí)現(xiàn)了農(nóng)機(jī)具的自動(dòng)調(diào)平控制。
目前,對于拖拉機(jī)后懸掛的調(diào)平或者姿態(tài)調(diào)整研究僅限于單側(cè)液壓缸調(diào)整或者旋耕機(jī)的調(diào)整,本文主要針對中等馬力丘陵山地拖拉機(jī)的三點(diǎn)式后懸掛機(jī)構(gòu)橫向位姿調(diào)整問題設(shè)計(jì)了—種雙液壓缸同時(shí)調(diào)整的液壓系統(tǒng),并采用模糊PID 控制方法,對所設(shè)計(jì)的橫向位姿調(diào)整液壓系統(tǒng)進(jìn)行仿真分析,并進(jìn)行了臺架試驗(yàn)。
1 橫向位姿調(diào)整機(jī)構(gòu)設(shè)計(jì)
丘陵山地拖拉機(jī)作業(yè)過程中需要進(jìn)行后懸掛機(jī)構(gòu)的姿態(tài)調(diào)節(jié),其目標(biāo)為在1 s 內(nèi)實(shí)現(xiàn)±15°的橫向位姿角度調(diào)節(jié),且耕深保持不變。因此,針對丘陵山地拖拉機(jī)作業(yè)需求,本文設(shè)計(jì)了—種基于液壓缸可變長度提升桿拖拉機(jī)后懸掛機(jī)構(gòu),2 個(gè)液壓缸活塞桿的相對位移關(guān)系決定了農(nóng)具的傾斜角度以及調(diào)整范圍,本文首先進(jìn)行橫向位姿調(diào)整機(jī)構(gòu)分析。
1.1 基于雙液壓缸的后懸掛橫向位姿調(diào)整機(jī)構(gòu)
針對拖拉機(jī)三點(diǎn)式懸掛機(jī)構(gòu),提出基于雙液壓缸的后懸掛橫向位姿調(diào)整機(jī)構(gòu)。橫向位姿調(diào)整方式可以分2 類:第1 類,采用伺服電機(jī)驅(qū)動(dòng)的滾珠絲杠構(gòu)提升桿;第2 類,采用液壓缸提升桿。鑒于拖拉機(jī)的作業(yè)工況,選擇液壓調(diào)整方式。利用液壓缸活塞帶動(dòng)下拉桿產(chǎn)生橫向角度,采用電液比例閥調(diào)節(jié)液壓缸活塞桿速度。由于機(jī)構(gòu)本身自由度的限制,結(jié)合丘陵山地的耕地地形變化,后懸掛提升桿采用2 個(gè)雙向非對稱液壓缸,實(shí)現(xiàn)在雙向15°范圍內(nèi)橫向位姿可調(diào),使農(nóng)機(jī)具與傾斜地面保持平行[1-5]。
坡度自適應(yīng)液壓后懸掛機(jī)構(gòu)是為主動(dòng)全姿態(tài)調(diào)整丘陵山地拖拉機(jī)設(shè)計(jì)的,采用主動(dòng)獨(dú)立姿態(tài)調(diào)控前驅(qū)動(dòng)裝置的控制方式和剛性結(jié)構(gòu)柔性姿態(tài)調(diào)節(jié)的獨(dú)立懸架后驅(qū)動(dòng)方式,實(shí)現(xiàn)整機(jī)各種作業(yè)工況下的主動(dòng)全姿態(tài)調(diào)控。動(dòng)力輸出為雙速、后置、非獨(dú)立式,電液提升器提升力≥8 000 N、額定牽引力≥7 000 N、爬坡度≥20°、后懸掛等高作業(yè)坡度≥15°。丘陵山地拖拉機(jī)后懸掛橫向位姿調(diào)整裝置組成示意圖如圖1 所示 。

圖1 拖拉機(jī)后懸掛橫向位姿調(diào)整裝置組成 Fig.1 Composition of lateral pose adjustment device of tractor rear suspension
1.2 橫向位姿調(diào)整控制策略
丘陵山地拖拉機(jī)采用了車身調(diào)平機(jī)構(gòu),遇到橫向坡度可以自動(dòng)調(diào)整車身橫向角度,調(diào)整范圍β≤15°。在坡度較小(β≤2°)工況下,后懸掛不需要進(jìn)行調(diào)整,液壓缸沒有動(dòng)作。當(dāng)橫向坡度為2°~15°時(shí),后懸掛提升桿雙液壓缸動(dòng)作,依據(jù)車身傾角與農(nóng)具傾角的反饋差值進(jìn)行調(diào)整,自動(dòng)調(diào)整流程圖如圖2。
1.3 橫向位姿調(diào)整機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析
為得出液壓缸活塞桿位移與農(nóng)具橫向傾角的關(guān)系,以進(jìn)行橫向位姿調(diào)整機(jī)構(gòu)控制,需進(jìn)行橫向位姿調(diào)整機(jī)構(gòu)的運(yùn)動(dòng)特性分析。本文將后懸掛下拉桿以及活塞桿簡化到—個(gè)平面內(nèi),建立液壓缸活塞桿位移與傾斜角度的幾何關(guān)系函數(shù)(本文以后懸掛三角架角度為傾斜角度,試驗(yàn)中的角度傳感器安裝位置也位于此)。
自耕深位置最大處開始,令左側(cè)液壓缸活塞桿位移變?yōu)樽钚。覀?cè)液壓缸活塞桿位移變?yōu)樽畲螅? 個(gè)液壓缸活塞桿位移的差值從0 逐漸增大至100 mm。懸掛機(jī)構(gòu)橫向位姿狀態(tài)如圖3 所示。

圖2 拖拉機(jī)后懸掛橫向位姿調(diào)整控制流程圖 Fig.2 Control flow chart of lateral pose adjustment of tractor rear suspension
在△ABC’中:

式中α1為左側(cè)液壓缸活塞桿與水平面夾角,(°);s1為左側(cè)液壓缸活塞桿位移,mm。

式中α2為右側(cè)液壓缸活塞桿與水平面夾角,(°);s2為右側(cè)液壓缸活塞桿位移,mm。
在△M’GN’中,

式中h1為左側(cè)下拉桿懸掛點(diǎn)D'到水平面的垂直距離,mm;h2為右側(cè)下拉桿懸掛點(diǎn)D''到水平面的垂直距離,mm;h 為農(nóng)具左側(cè)懸掛點(diǎn)M'與右側(cè)懸掛點(diǎn)N'的垂直變化距離,mm。
本液壓系統(tǒng)中,采用了非對稱液壓缸,即活塞兩端面積不相等,其比例公式如下:

式中s1、s2為液壓缸桿位移,m。D、d 為液壓缸活塞直徑和活塞桿直徑,m。以右側(cè)液壓缸(AC'')為研究對象,以s2為自變量,建立農(nóng)具傾角φ 與液壓缸活塞桿位移s2的函數(shù),如式(7)~式(8)所示。當(dāng)s2>0 時(shí),活塞桿做提升運(yùn)動(dòng);當(dāng)s2<0、液壓缸反向運(yùn)動(dòng)時(shí),活塞桿做下放運(yùn)動(dòng),當(dāng)s2=0 時(shí) 活塞桿無運(yùn)動(dòng)。

式(7)~式(8)中,∠ABC 為△ABC 內(nèi)角B 的度數(shù),(°);D 為提升桿液壓缸缸筒內(nèi)徑,mm;d 為提升桿液壓缸活塞直徑,mm;AB 為鉸接點(diǎn)A 與鉸接點(diǎn)B 之間的長度,mm;BC 為鉸接點(diǎn)B 與鉸接點(diǎn)C 之間的長度,mm;AC 為左、右兩側(cè)提升桿的原始長度,mm; BD 為左、右兩側(cè)下拉桿的長度,mm。△h 為農(nóng)具橫梁MN 中點(diǎn)的垂直變化距離,mm。

圖3 液壓缸運(yùn)動(dòng)與農(nóng)具橫向平面轉(zhuǎn)角關(guān)系 Fig.3 Relationship between movement of hydraulic cylinders and lateral plane angle of agricultural tools
如圖3 所示,△ABC 為下拉桿處于水平面時(shí)的簡化圖,將空間機(jī)構(gòu)簡化為平面機(jī)構(gòu)便于分析幾何關(guān)系。△PMN 為懸掛農(nóng)具的三角架,△P’M’N’為橫向調(diào)整后三角架位置。圖中可以看出,由于為非對稱液壓缸,液壓缸活塞桿位移s1(AC'-AC)與s2(AC- AC'')不相等,導(dǎo)致△PMN 不能圍繞中間點(diǎn)旋轉(zhuǎn)。因此,形成了影響耕深的可由后懸掛的提升下降液壓缸在原耕深基礎(chǔ)上進(jìn)行修正調(diào)節(jié),其幾何關(guān)系如下:

基于式(7)~(8),采用MATLAB 編程進(jìn)行仿真。根據(jù)液壓缸活塞桿最大行程,將仿真范圍在設(shè)定為正負(fù)100 mm,仿真得到液壓缸活塞桿位移與橫向角度的關(guān)系,如圖4 所示。
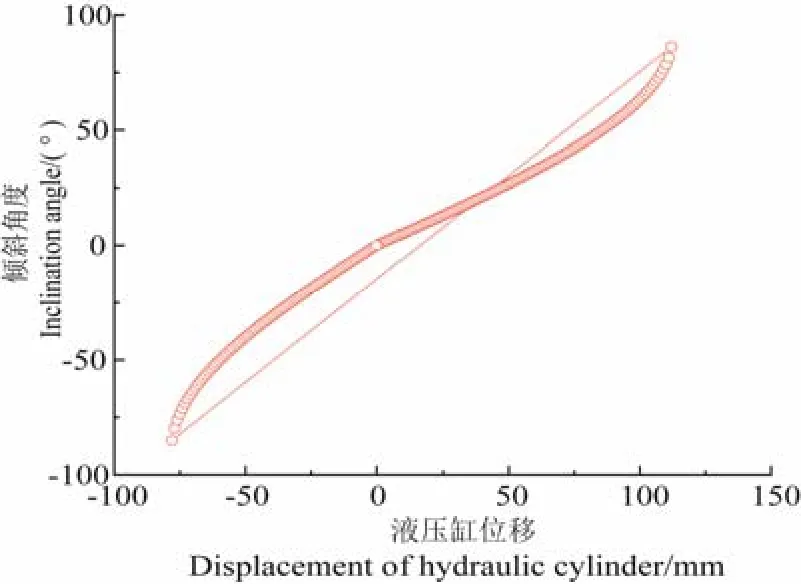
圖4 液壓缸活塞桿位移與后懸掛傾角的關(guān)系 Fig.4 Relationship between displacement of hydraulic cylinder piston rod and rear suspension inclination angle
2 橫向位姿調(diào)整機(jī)構(gòu)液壓系統(tǒng)設(shè)計(jì)
根據(jù)丘陵山地拖拉機(jī)后懸掛機(jī)構(gòu)橫向位姿調(diào)整的設(shè)計(jì)要求,液壓系統(tǒng)采用定量負(fù)載敏感回路。該液壓系統(tǒng)有2 個(gè)活塞式液壓缸代替后懸掛提升桿,有自動(dòng)調(diào)整與手動(dòng)調(diào)整2 種模式;同時(shí),在橫向位姿調(diào)整完成后,后懸掛能夠保持與坡地的平行姿態(tài),在液壓油路上采用了液壓鎖;根據(jù)圖4,在±15° 范圍內(nèi),后懸掛傾角與液壓缸活塞桿位移成線性關(guān)系,因此確定后懸掛的調(diào)整角度為±15°。后懸雙側(cè)液壓缸均采用HSG40/22-180×408,液壓缸活塞桿最大行程為180 mm,內(nèi)徑32 mm,外徑40 mm,活塞桿直徑22 mm,公稱壓力7.4 MPa;由于機(jī)構(gòu)對液壓缸行程的約束,液壓缸活塞桿單側(cè)最大行程50 mm,雙側(cè)行程差100 mm。確定液壓系統(tǒng)的主要元器件型號及個(gè)數(shù)如表1 所示,液壓系統(tǒng)的原理如圖5 所示。
丘陵山地拖拉機(jī)橫向位姿調(diào)整過程為:在坡度 ≤ 15°的工況下,拖拉機(jī)啟動(dòng)自動(dòng)調(diào)平功能。齒輪泵3 在發(fā)動(dòng)機(jī)啟動(dòng)后—直工作,液壓油經(jīng)吸油過濾器4、齒輪泵3 到達(dá)定差減壓閥5,當(dāng)齒輪泵3 輸出油液壓力達(dá)16 MPa后,油液經(jīng)溢流閥1 流回油箱。高壓油經(jīng)過定差減壓閥5、節(jié)流閥10 進(jìn)入三位五通電液比例換向閥,對應(yīng)調(diào)整角度的方向(左傾15°或者右傾15°)分別啟動(dòng)比例閥,安裝在農(nóng)機(jī)具的反饋信號與車身傾角傳感器的差值作為控制信號反饋給控制器,形成閉環(huán)控制。當(dāng)差值為零(≤2°),對應(yīng)的電液比例閥關(guān)閉,不再給液壓缸供油,液壓鎖關(guān)閉,橫向位姿調(diào)整結(jié)束。同時(shí),本液壓系統(tǒng)采用負(fù)載敏感設(shè)計(jì),通過單向閥6 將最大壓力反饋到差壓式溢流閥2,如果出現(xiàn)負(fù)載突然變大導(dǎo)致壓力升高,液壓油經(jīng)差壓式溢流閥流回油箱,起到保護(hù)液壓回路元器件的作用。同時(shí),由于采用液壓鎖設(shè)計(jì),可以將液壓缸鎖定在某—位置,避免負(fù)載傳感小流量泄露導(dǎo)致的液壓缸振動(dòng)以及頻繁調(diào)整。當(dāng)坡度開始減小、直到車身傾角傳感器與農(nóng)具傾角傳感器差值≥2°時(shí),差值信號反饋給模糊PID 控制器,經(jīng)過控制器處理,電磁換向閥重新接通,右側(cè)液壓缸11 和左側(cè)液壓缸12 重新調(diào)整活塞桿位移,直至達(dá)到差值<2°,橫向位姿調(diào)整結(jié)束。

表1 液壓系統(tǒng)各液壓元件的名稱與型號 Table 1 Name and model of each hydraulic component of hydraulic system

圖5 橫向位姿調(diào)整液壓系統(tǒng)原理圖 Fig.5 Lateral pose adjustment hydraulic system schematic
3 橫向位姿調(diào)整機(jī)構(gòu)液壓系統(tǒng)建模與分析
3.1 數(shù)學(xué)模型的建立
在橫向位姿調(diào)整液壓系統(tǒng)中,采用了三位五通電液比例閥以及非對稱活塞液壓缸,液壓原理如圖6 所示。因此閥控液壓缸的建模主要包括電液比例閥的流量方程、液壓缸流量連續(xù)性方程和液壓缸力平衡方程[12]。數(shù)學(xué)模型分析如下:
1)力平衡方程

式中m 為活塞與所有連接物體的總質(zhì)量,1 600 kg;x 為液壓缸活塞桿位移,m;p1和p2為液壓缸的輸入和輸出腔體壓力,Pa;A1,A2分別是2 個(gè)腔體的有效活塞面積,分別為8.038 4e-4和4.898 4e-4m2;FL為外部負(fù)載力,包括黏性阻力,N;Ff為活塞上的摩擦力,N。
2)負(fù)載流量連續(xù)性方程
對于出現(xiàn)泄漏的雙向液壓缸系統(tǒng),其流量連續(xù)性方程[13-18]為

式中V1=0.000 34,V2=0.000 097,分別為左室和右室的原始控制體積[19-27],包括閥、管道和液壓缸控制腔的體積m3;βe為體積彈性模模量,6.85 e8Pa;q1為向左室提供的流量,q2為右室的回流流量,m3/s;qi為內(nèi)部泄漏流量,qe1和qi2為外部泄露流量,m3/s。

式中 ci=1 097,為內(nèi)部泄漏系數(shù), m3/(s·MPa);ce1=ce2=120,為外部泄漏系數(shù),m3/(s·MPa);
3) 閥口流量方程:


圖6 橫向位姿調(diào)整閥控液壓缸原理圖 Fig.6 Schematic diagram of lateral pose adjustment valve-controlled hydraulic cylinder
其中 s ( xv)函數(shù)[28]的定義如下:

式(16)~(20)中kq1= kq2=2.68×10-5,為流量增益,是關(guān)于面積梯度的函數(shù),無量綱;ps為油源壓力,Pa;pr為回油壓力,Pa;xv為換向閥閥芯位移,m;Cd=0.68,為流量系數(shù),無量綱; w1= w2=0.023 7,為閥芯節(jié)流口面積梯度,m;ρ=850,為液壓油密度,kg/m3。
將上述公式整理可得:

式中ζ =0.5,為閥的阻尼比,無量綱;nω 為閥的固有頻率,120.5 rad/s;Kv為閥的電壓增益,10.5×10-5m/V;u為輸入電壓信號,V。

此處

3.2 控制系統(tǒng)建模
依據(jù)丘陵山地拖拉機(jī)后懸掛橫向位姿調(diào)整液壓原理圖,系統(tǒng)采用角度負(fù)反饋方式,閥控液壓缸模型采用狀態(tài)反饋方式搭建,采用模糊自適應(yīng)整定 PID 控制原理,在Simulink 中建立仿真模型。將 PID 控制的規(guī)則和條件用模糊集合表示,并將這些模糊規(guī)則預(yù)先編制好存儲(chǔ)在控制器中。根據(jù)控制系統(tǒng)的實(shí)際運(yùn)行狀況,控制器可以利用模糊推理自適應(yīng)地調(diào)整 PID 參數(shù),從而達(dá)到最佳的控制效果。
模糊自適應(yīng) PID 控制由 PID 控制器和模糊控制器2 部分組成。模糊控制器以偏差 e 和偏差變化率 ec 為輸入,利用事先儲(chǔ)存的模糊規(guī)則表在線對 PID 參數(shù)進(jìn)行實(shí)時(shí)調(diào)整,得到最合適的參數(shù)值,然后將調(diào)整好的參數(shù)值增量疊加到原本的 PID 控制器中
3.2.1 輸入輸出變量及其模糊子集的確定
在橫向位姿坡度自適應(yīng)控制中,輸入車身傾斜角偏差值以及偏差變化率,輸出為PID 控制器的3 個(gè)參數(shù)修正值Δkp、Δki、Δkd。對模糊控制器而言,控制模式均為雙輸入三輸出的形式。
模糊控制器無法識別連續(xù)變量,因此首先要將變量在其論域范圍內(nèi)進(jìn)行離散化,各變量論域值范圍均為[-15,15]。依據(jù)確定論域值的劃分規(guī)則,各變量的離散論域劃分[29]如下:
比例系數(shù)變化量Δkp 的離散論域?yàn)閧-15,-10,-2,0, 2,10,15};
積分系數(shù)變化量Δki 的離散論域?yàn)閧-15,-10,-2,0,2, 10,15};
微分系數(shù)變化量Δkd 的離散論域?yàn)閧-15,-10,-2,0,2, 10,15};
各變量的量化等級均為 7 級,相應(yīng)的模糊子集為{NB,NM,NS,Z,PS,PM,PB},各模糊變量代表的含義分別為“負(fù)大”、“負(fù)中、“負(fù)小”、“零”、“正小”、“正中”、“正大”。
3.2.2 隸屬度函數(shù)的確定
模糊控制中隸屬度函數(shù)的形狀對控制效果影響較大。隸屬度函數(shù)形狀較尖的模糊子集分辨率高,控制更靈敏。隸屬函數(shù)較平緩的模糊子集,分辨率低,控制更穩(wěn)定[29]。各變量的隸屬度函數(shù)中,當(dāng)誤差為 NB 與 PB 時(shí),為了提高穩(wěn)定性,NB 采用 zmf 型隸屬度函數(shù),PB 采用 smf 型隸屬度函數(shù)。其他模糊子集均采用 trimf 型隸屬度函數(shù),以提高系統(tǒng)的響應(yīng)速度。
3.2.3 模糊規(guī)則的建立
模糊 PID 控制器的模糊規(guī)則用來表述輸入變量 e、ec 與輸出變量Δkp、Δki、Δkd 間的對應(yīng)關(guān)系,如表3 所示。

表3 Δkp、Δki、Δkd 控制規(guī)則表 Table 3 Δkp、Δki、Δkd fuzzy control rule table
3.2.4 PID 自適應(yīng)校正
Δkp、Δki、Δkd的模糊控制規(guī)則表建立之后,將系統(tǒng)的輸入變量 e、ec的變化范圍定義為模糊集上的論域。

設(shè)e、ec 和kp、ki、kd 均服從正態(tài)分布,因此可以得出各個(gè)模糊子集的隸屬度,根據(jù)模糊子集的隸屬度賦值表和各參數(shù)模糊控制模型,應(yīng)用模糊合成推理設(shè)計(jì)PID參數(shù)的模糊矩陣表,查出修正參數(shù)代入下式:

運(yùn)行控制系統(tǒng)過程中,系統(tǒng)通過模糊規(guī)則的結(jié)果處理、查表、運(yùn)算,完成對PID 參數(shù)的自動(dòng)校正,如圖7 所示。

圖7 kp、ki、kd 的自適應(yīng)調(diào)整 Fig.7 Adaptive adjustment on coefficients of kp、ki、kd
3.3 仿真結(jié)果及其分析
根據(jù)采用的液壓閥內(nèi)部結(jié)構(gòu)參數(shù)以及液壓缸尺寸參數(shù),搭建上述仿真模型,在仿真模型中,用階躍函數(shù)代替實(shí)際試驗(yàn)中車身傾角的測量值。由于中國丘陵山地坡度多為10°~15°,分別設(shè)定輸入值為+10°和+15°,仿真時(shí)間為5 s,換向閥控制電壓為2.5 V,采用PID 反饋控制2 個(gè)液壓缸同時(shí)移動(dòng),將兩側(cè)液壓缸活塞桿位移絕對值之和作為角度換算的輸入值輸入到擬合函數(shù),階躍時(shí)間在第2 s,得到2 個(gè)液壓缸活塞桿位移隨時(shí)間變化曲線,如圖8 所示。

圖8 兩個(gè)液壓缸活塞桿位移隨時(shí)間變化曲線 Fig.8 Displacement versus time curve of two hydraulic cylinders piston rod
由 于液壓缸采用非對稱活塞桿液壓缸,在采用2 個(gè)液壓缸調(diào)節(jié)角度時(shí),2 個(gè)液壓缸活塞桿速度不—樣,因此液壓缸桿活塞位移在圖10 中不對稱,2 個(gè)液壓缸的活塞桿位移絕對值之和等于角度調(diào)節(jié)所需的單桿液壓缸活塞桿調(diào)節(jié)長度,但速度較單桿液壓缸快。
4 驗(yàn)證試驗(yàn)
4.1 試驗(yàn)平臺
在中國農(nóng)業(yè)大學(xué)上莊試驗(yàn)站,采用五征40 馬力拖拉機(jī)搭建試驗(yàn)平臺,測試后懸掛橫向位姿調(diào)整角度能否達(dá)到設(shè)定目標(biāo)值(10°~15°)。首先,對后懸掛傾角傳感器進(jìn)行了標(biāo)定,其次,采用手動(dòng)調(diào)節(jié)車身傾角傳感器作為輸入信號。由于采用非對稱活塞桿液壓缸,啟動(dòng)橫向位姿調(diào)整前,提升桿兩側(cè)液壓缸活塞桿伸出量需調(diào)整至50 mm,如果采用單側(cè)液壓缸角度調(diào)整無需預(yù)先伸出液壓桿,試驗(yàn)采用雙液壓缸調(diào)節(jié)和模糊自適應(yīng)整定PID 控制策略。
拖拉機(jī)后懸掛系統(tǒng)控制試驗(yàn)平臺主要由液壓系統(tǒng)、虛擬終端和數(shù)據(jù)獲取系統(tǒng)3 部分組成,如圖9 所示,其中懸掛系統(tǒng)主要由拖拉機(jī)液壓泵、多路換向閥、升降液壓缸、提升桿伸縮液壓缸、農(nóng)具、提升臂及油管等組成;虛擬終端主要由顯示器、控制器、傾角傳感器、及可變電源等組成;數(shù)據(jù)獲取系統(tǒng)由USBCAN 接口卡和PC 機(jī)組成。
拖拉機(jī)液壓泵額定流量為20 L/min,額定壓力為 16 MPa。農(nóng)具橫向傾角傳感器由24 V 電源供電,傾角信號輸出端與控制器AI21 電流采集端口連接,接地線與控制器AGND 模擬地端口連接,構(gòu)成回路使控制器采集傾角信號。
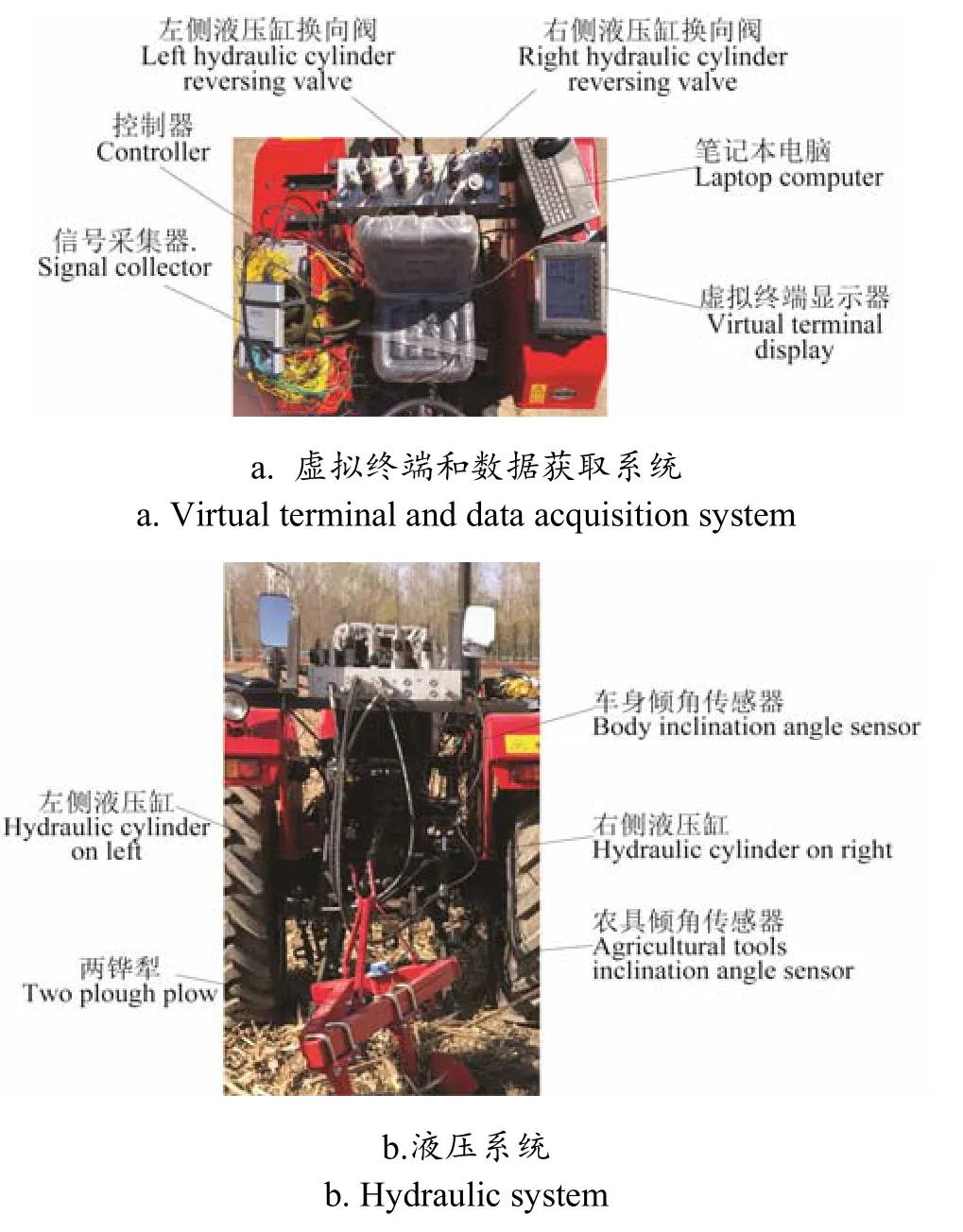
圖9 實(shí)車試驗(yàn) Fig.9 Real vehicle test
4.2 結(jié)果與分析
本試驗(yàn)?zāi)康臑椋涸O(shè)置車身傾角,測試后懸掛經(jīng)過控制器的輸出信號控制液壓缸活塞桿位移導(dǎo)致的角度變化是否與仿真結(jié)果—致。試驗(yàn)過程中,通過調(diào)整車身產(chǎn)生不同的傾斜角度,控制器輸出控制電流,使兩側(cè)液壓缸活塞產(chǎn)生位移,達(dá)到調(diào)節(jié)農(nóng)具橫向傾角的目的,調(diào)整效果如圖9 所示。
保存數(shù)據(jù)并處理,得到農(nóng)具橫向傾角隨時(shí)間變化的曲線,如圖10 所示,在前2 s 內(nèi)顯示器—共發(fā)送10 次增加電磁鐵輸入電流的控制信號,每次使得控制兩側(cè)液壓缸活塞桿提升的PWM3 占空比增加5%,最終PWM3 的占空比為50%,兩側(cè)液壓缸活塞桿運(yùn)動(dòng)時(shí)間約1 s,農(nóng)具橫向傾角由0°上升為10°。
本試驗(yàn)中,換向閥開啟的死區(qū)電壓4.2 V,PWM3 占空比≤35%時(shí),閥芯不能開啟。

圖10 傾角變化曲線 Fig.10 Inclination change curve
在試驗(yàn)數(shù)據(jù)采集中,由于后懸掛結(jié)構(gòu)的不穩(wěn)定性以及測量誤差等原因,三點(diǎn)懸掛鉸接部件產(chǎn)生干涉,試驗(yàn)采集數(shù)據(jù)在初始階段振蕩嚴(yán)重,導(dǎo)致試驗(yàn)和仿真數(shù)據(jù)誤差較大。車身調(diào)平的同時(shí),采用PID 控制器根據(jù)車身傾角傳感器對后懸掛進(jìn)行橫向位姿調(diào)整,由圖10 可知,穩(wěn)定后的仿真數(shù)據(jù)和試驗(yàn)采集數(shù)最大誤差為1%,平均誤差為0.7%;仿真試驗(yàn)中模糊 PID 自適應(yīng)控制的過渡過程時(shí)間不足0.2 s,系統(tǒng)無超調(diào)。實(shí)際試驗(yàn)的調(diào)整時(shí)間為1 s左右,試驗(yàn)調(diào)量為0,目標(biāo)值與試驗(yàn)數(shù)據(jù)的最大誤差13.3%,平均誤差10%。
5 結(jié) 論
本文針對于丘陵山地拖拉機(jī)設(shè)計(jì)了三點(diǎn)式后懸掛的橫向位姿調(diào)整液壓和控制系統(tǒng),并進(jìn)行了仿真試驗(yàn)與臺架試驗(yàn),主要結(jié)論如下:
1) 通過MATLAB 軟件對系統(tǒng)進(jìn)行運(yùn)動(dòng)學(xué)仿真,得出100 mm 液壓缸活塞桿行程內(nèi),后懸掛機(jī)構(gòu)傾斜角度與液壓缸活塞桿位移的函數(shù)關(guān)系,并將其應(yīng)用到仿真控制模型中。
2) 根據(jù)丘陵山地拖拉機(jī)電液懸掛控制系統(tǒng)的特點(diǎn)進(jìn)行液壓回路的分析,搭建了雙液壓缸橫向位姿調(diào)節(jié)液壓系統(tǒng)模糊PID 仿真控制模型并進(jìn)行了臺架試驗(yàn)。設(shè)定傾斜角度由0°階躍至15°時(shí),系統(tǒng)過渡過程時(shí)間為 1 s,系統(tǒng)超調(diào)量為 0,系統(tǒng)控制平穩(wěn)。結(jié)果表明,本文所設(shè)計(jì)的后懸掛機(jī)構(gòu)能適應(yīng)地形的在±15°范圍內(nèi)的變化,滿足拖拉機(jī)在山地丘陵作業(yè)過程中的橫向位姿調(diào)節(jié)需求。
