齒條傳動(dòng)系統(tǒng)的速度及定位控制設(shè)計(jì)
2019-02-21 08:04:56張晶亮
煤礦機(jī)電 2019年1期
張晶亮
(中國(guó)煤炭科工集團(tuán) 上海有限公司, 上海 200030)
0 引言
齒輪齒條傳動(dòng)是最常見的機(jī)械傳動(dòng)方式,是實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng)和直線運(yùn)動(dòng)相互轉(zhuǎn)換的傳動(dòng)方案,它具有運(yùn)行噪聲低、傳動(dòng)平穩(wěn)、維修簡(jiǎn)單的優(yōu)點(diǎn)[1]。同時(shí),隨著驅(qū)動(dòng)技術(shù)的發(fā)展,伺服驅(qū)動(dòng)及其控制系統(tǒng)在各行各業(yè)、各種形式的設(shè)備中應(yīng)用會(huì)越來越廣泛。兩者的有效結(jié)合,可組成各式各樣的機(jī)械伺服驅(qū)動(dòng)系統(tǒng)。本文主要介紹三菱MR-JR4伺服控制系統(tǒng),并根據(jù)工藝要求,設(shè)計(jì)了速度和位置雙重控制方案。
1 系統(tǒng)總體設(shè)計(jì)
1.1 系統(tǒng)簡(jiǎn)介
如圖1所示,設(shè)備主體運(yùn)動(dòng)部件為沿軌道做往返運(yùn)動(dòng)的移動(dòng)艙,其具有質(zhì)量大、往返行程固定、電動(dòng)機(jī)驅(qū)動(dòng)扭矩大、速度緩慢等特點(diǎn)。但在安全方面,若其過行程,則會(huì)產(chǎn)生傾覆的危險(xiǎn),故除了需要在機(jī)械方面設(shè)置過行程保護(hù)裝置外,在電氣方面亦需設(shè)置限位保護(hù)功能。
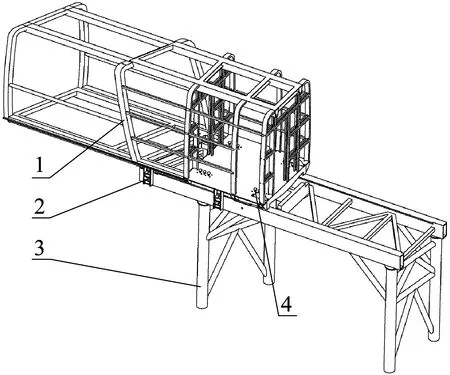
1-移動(dòng)座艙骨架;2-側(cè)輪組;3-主立架子軌道框架;4-制動(dòng)裝置
1.2 驅(qū)動(dòng)系統(tǒng)構(gòu)成
設(shè)備驅(qū)動(dòng)系統(tǒng)主要由伺服電動(dòng)機(jī)、減速器、齒輪、齒條組成,如圖2所示。
1.3 控制方式設(shè)計(jì)思路
伺服系統(tǒng)有速度控制、力矩控制、位置控制3種控制方式[2]。在精密直線、環(huán)行行走設(shè)備中,由于齒條與驅(qū)動(dòng)齒輪的精密配合,加上伺服控制系統(tǒng)的優(yōu)越性能,通過脈沖控制能進(jìn)行準(zhǔn)確的定位和速度控制。但在大扭矩齒條直線行走傳動(dòng)系統(tǒng)中,齒條和驅(qū)動(dòng)齒輪的齒牙尺寸較大,其配合誤差相對(duì)也較大,通過單一的脈沖控制來進(jìn)行準(zhǔn)確的定位和速度控制存在一定的誤差和難度。從安全工藝要求方面考慮,需要設(shè)置多重的限位保護(hù)來降低風(fēng)險(xiǎn),提高設(shè)備的安全性能。因此,提出以下設(shè)計(jì)思路:
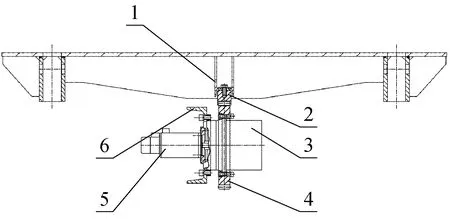
1-移動(dòng)座艙柜架;2-齒條;3-減速器;4-齒輪;5-伺服電動(dòng)機(jī);6-主立架框架
1) 利用伺服控制系統(tǒng)脈沖控制實(shí)現(xiàn)內(nèi)部速度控制和位置控制。
2) 在可編程控制器(PLC)端設(shè)置外部到位行程開關(guān),形成對(duì)內(nèi)部位置控制的補(bǔ)充。
3) 利用伺服控制系統(tǒng)的正反轉(zhuǎn)形成末端控制功能,提供第一道限位保護(hù)功能。
4) 在PLC端設(shè)置極限保護(hù)行程開關(guān),實(shí)現(xiàn)設(shè)備斷電保護(hù)的限位保護(hù)功能。
通過以上外部限位開關(guān)、內(nèi)部位置及速度控制結(jié)合的方式,實(shí)現(xiàn)精確定位、速度控制、安全保護(hù)功能。系統(tǒng)控制框圖如圖3所示。
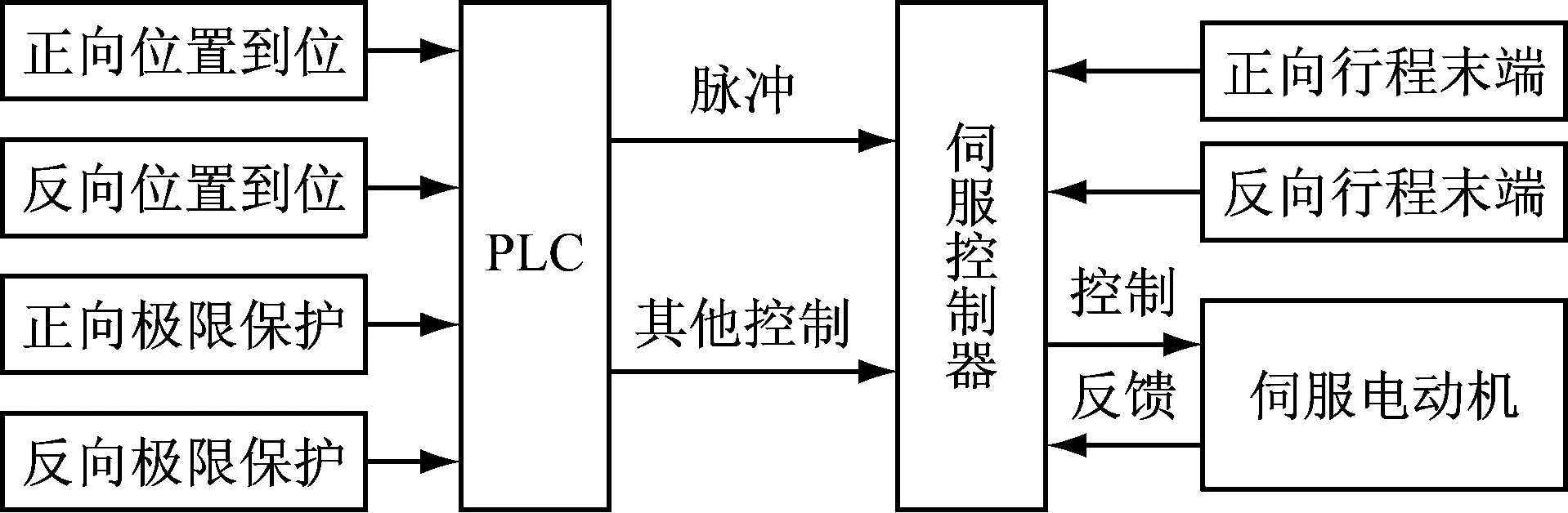
圖3 系統(tǒng)控制框圖
2 控制系統(tǒng)設(shè)計(jì)與相關(guān)計(jì)算
2.1 硬件組成
系統(tǒng)硬件主要由三菱可編程控制器(PLC)FX3U、伺服控制器MR-JR4、伺服電動(dòng)機(jī)HG-JR和P+F電感式接近開關(guān)NBN12-18GM組成。其中FX3U-20SSC-H定位模塊采用第三代伺服控制網(wǎng)絡(luò)總線配合三菱FR-JR4通信,可以輕松構(gòu)建伺服電動(dòng)機(jī)的絕對(duì)位置系統(tǒng),減少外部接線[3]。
2.2 基本原理
1) 內(nèi)部速度、位置控制。控制系統(tǒng)中,交流伺服電動(dòng)機(jī)的控制繞組通常是與伺服放大器的輸出端相連接的,控制電信號(hào)通過放大器放大后加到控制繞組中,進(jìn)而控制伺服電動(dòng)機(jī)的轉(zhuǎn)速和絕對(duì)位置[4]。
2) 伺服控制器轉(zhuǎn)速設(shè)定。伺服控制器轉(zhuǎn)速由PLC編程設(shè)定的脈沖輸出頻率f以及伺服控制器參數(shù)設(shè)置的電子齒輪比CMX/CDV共同確定,進(jìn)而由伺服控制器輸出信號(hào)到伺服電動(dòng)機(jī)控制繞組,控制電動(dòng)機(jī)按設(shè)定速度運(yùn)轉(zhuǎn)。根據(jù)電動(dòng)機(jī)轉(zhuǎn)速(每秒脈沖數(shù))、機(jī)械齒輪尺寸、減速器減速比、行程計(jì)算電子齒輪比,計(jì)算所需脈沖數(shù),在PLC中編程,并根據(jù)PLC數(shù)據(jù)存儲(chǔ)器范圍確定定位范圍,設(shè)定定位數(shù)據(jù)倍率,實(shí)現(xiàn)內(nèi)部位置控制。
2.3 系統(tǒng)計(jì)算
1) 電子齒輪比計(jì)算。設(shè)備設(shè)計(jì)線性速度v,齒輪周長(zhǎng)c、減速器減速比i。
齒輪每秒轉(zhuǎn)數(shù)
n1=v/C
(1)
電動(dòng)機(jī)每秒轉(zhuǎn)數(shù)
n2=i·n1=i·v/C
(2)
PLC程序設(shè)定以其最大輸出頻率f輸出脈沖給伺服控制器,則電動(dòng)機(jī)每轉(zhuǎn)需要脈沖數(shù)(PLS)為
x=f/n2=f·C/ (i·v)
(3)
伺服電動(dòng)機(jī)分辨率為Pt(PLS/REV,每轉(zhuǎn)額定脈沖數(shù)),則伺服控制器設(shè)置電子齒輪比為
CMX/CDV=Pt/x=i·v·Pt/(f·C)
(4)
式中:CMX電子齒輪指令脈沖倍率分子,CDV為電子齒輪指令脈沖倍率分母,兩者取最接近的整數(shù)。
2) 脈沖數(shù)計(jì)算。設(shè)備行程s,線性速度為v。
單行程運(yùn)行時(shí)間
t=s/v
(5)
單行程需要脈沖數(shù)
y=t·f
(6)
實(shí)際運(yùn)行過程中,因大尺寸齒輪和齒條存在配合誤差相對(duì)較大,理論計(jì)算需要脈沖數(shù)與實(shí)際需要脈沖數(shù)存在一定的誤差。所以,需要在理論計(jì)算的基礎(chǔ)上進(jìn)行多次往返運(yùn)行,確定行程線性誤差,折算成脈沖數(shù),采集樣本,取其平均值與理論值相加作為最終設(shè)定脈沖數(shù)。
2.4 其他控制
1) 外部位置控制。當(dāng)設(shè)定固定的脈沖數(shù)后,為了預(yù)防在往返過程中因累積誤差造成的過行程,設(shè)置外部限位開關(guān),一旦脈沖數(shù)未全部輸出完畢,而行程開關(guān)動(dòng)作,則由PLC程序?qū)⒚}沖歸零,停止脈沖輸出,伺服電動(dòng)機(jī)停止轉(zhuǎn)動(dòng)。
2) 安全保護(hù)。為了防止因伺服電動(dòng)機(jī)不受內(nèi)部速度、位置控制或外部位置控制等原因引起故障,造成電動(dòng)機(jī)失控,在PLC側(cè)和伺服放大器側(cè)設(shè)計(jì)正反轉(zhuǎn)限位的限位開關(guān),一旦開關(guān)動(dòng)作,即切斷伺服電動(dòng)機(jī)輸出或關(guān)斷系統(tǒng)電源。
3 軟件設(shè)計(jì)
3.1 程序組成
整個(gè)控制系統(tǒng)的控制部分由三菱可編程控制器FX3U作為控制核心,設(shè)計(jì)有多種脈沖輸出指令和定位指令,使定位控制的程序編制十分簡(jiǎn)易、方便[5]。本設(shè)備利用MRLSOFT軟件編制控制程序,整個(gè)控制程序主要由速度設(shè)定程序、加減速時(shí)間設(shè)定程序、JOG運(yùn)行程序、正轉(zhuǎn)定位控制程序、反轉(zhuǎn)定位控制程序、外部位置控制程序、外部極限限位控制程序及其他輔助程序組成。
3.2 程序主要指令介紹
1) MOV U0G7 K4M0:讀取FX3U-20SSC-H端子信息;
2) DMOVP K100 U0G14018,DMOVP K110 U0G14020:設(shè)定加減速時(shí)間;
3) DMOV D500 U0G500:設(shè)定運(yùn)行速度;
4) DMOV U0G0 D0:設(shè)定位置信息;
5) MOV K4M20 U0G518:設(shè)置運(yùn)行操作指令。
4 結(jié)論
通過內(nèi)、外部速度控制和位置控制的有效結(jié)合,以及外部雙重限位保護(hù),成功地實(shí)現(xiàn)了位置的精確定位,降低了設(shè)備傾覆的危險(xiǎn),保證穩(wěn)定、安全運(yùn)行。