三維激光掃描在非煤礦山生產的應用
2019-02-19 09:39:36隋建政李全明中國安全生產科學研究院北京100012
中國礦山工程 2019年6期
隋建政, 陳 濤, 李全明, 張 紅(中國安全生產科學研究院, 北京 100012)
1 前言
三維激光掃描是利用激光測距的原理,通過發射激光束形成大量激光點掃描被測物體,來獲取被測物體表面三維坐標形成點云數據,來實現對實物的逆向建模。傳統的測繪技術,使用RTK或全站儀對物體表面進行單點測量,只獲得物體特征點和控制點坐標數據,利用三維建模軟件繪制和渲染建模,測量點稀疏、效率低,難以呈現復雜的礦山信息。三維激光掃描技術為實景復制技術,每秒可測量數百萬個點,并且采用非接觸測量,具有速度快、精度高、真實感強,不受表面復雜程度影響等特點,可快速掃描礦山表面獲得三維點云數據,并形成分辨率的礦山數字模型[1]。目前,三維激光掃描技術已經應用于各行各業,也為礦山未來生產和安全管理提供了技術支撐。
2 三維激光掃描對在礦山中的應用前景
2.1 構建智慧礦山
利用三維激光掃描技術獲取礦區地上建筑物和工業設施,地下巷道、硐室、工作面、采空區以及通風排水等設施的點云數據,結合其他三維數據,如三維地質、水文等,借助現有的商業軟件,像micromine和3Dmine將各種三維數據整合處理,形成一幅完整的礦區地上、地下數字立體圖,實現數字礦山。在數字礦山的基礎上結合物聯網技術、虛擬現實技術、物理模擬技術、人工智能技術等可完成智慧礦山的搭建。智慧礦山可以為礦山的生產管理、應急演練、應急救援、標準化培訓等提供全面的應用[2]。
2.2 提升生產和安全管理水平
隨著我國礦產資源開發強度加大,開采技術不斷提高,需要更高效的生產管理輔助系統。三維模型不僅給領導和管理人員決策提供了直觀可視化參考,也更加便于技術人員在礦體開采、井巷布置方案上進行設計,也為施工人員快速理解方案設計意圖提供幫助。用平面圖紙讓每位礦山工作者理解復雜的設計方案有很大的難度,利用三維技術向工作人員講解就比較容易溝通,易于理解。同時為巷道中的工作人員導航、人員和設備的定位提供位置數據支持,能夠幫助工作人員準確到達工作地點,一旦出現異常情況,能夠迅速到達就近避險點。
近年來,國家對礦山安全生產的要求越來越高,但是礦山安全事故預警與防治技術相對而言仍處于落后狀態,與國家的要求還有差距。
例如地下采空區,由于采礦方法、開采措施的不同,造成采空區結構形態各異,采空區可能導致礦震、空氣沖擊波、巖爆、地面塌陷等多種災害形式。采空區造成的危害是制約礦山發展及正常生產經營的一大難點。利用激光三維掃描,可以準確的獲得采空區的結構數據,確定采空區的方位及分布,頂板面積和實際邊界等結構信息,為采空區的穩定分析、危害辨識、風險評估及后期采空區的填充處理提供了可視化的數據支持。
在三維巷道模型中嵌入安全監測傳感器的實際坐標,當某處檢測信息出現異常時,隱患事故點可以做到立體可視化安全監測。如變形點、透水點、塌方點等。
在三維模型的基礎上,可以進行透水水淹模擬,采空區塌陷、空場冒頂、尾礦庫壩體變形等模擬,為制定應急預案提供科學依據,也能為事故救援工作提供準確的空間位置數據。
露天采礦區多陡峭地形,不穩定山體等,對于測量人員來說安全隱患較大。坍塌主要因為露天礦山邊坡失穩和破壞所致,由于露天采礦開挖了礦巖,必然在其周圍形成邊坡。這些邊坡可能在暴雨、地下水、地震、爆破震動、重載車輛通行時,會使其局部(或大部)失去穩定,產生滾石、滑坡、坍塌等而形成危害。通過三維激光掃描可以獲得邊坡實時數據,從而計算出邊坡型變量、滑坡方向和速度等數據,以此來掌握邊坡的變化規律,對邊坡安全監測及評價有著重要意義。
3 礦區三維掃描實例
3.1 采空區掃描
利用采空區掃描探頭可對地下采空區空間進行三維測量。探頭由激光發射器和內置攝像機組成,利用激光脈沖并輔以精密微機電陀螺等技術對地下空間進行自動掃描,從而獲得采空區的高密度點云數據。探桿有多種方式可以將伸入采空區,根據不同的情況具體操作方式不同。一般情況下,通過在采空區地表鉆孔的方式垂直鉆入采空區,探頭連接延長探桿伸入采空區即可進行掃描。若井下中段作業,由于采空區與巷道之間的連接洞口情況復雜,洞口處布滿滑落的碎石難以立足,采空區頂部隨時有掉落石塊的危險,無法靠近洞口作業。可以將探桿固定到叉車上利用叉車加探桿的方式輔助完成掃描工作[3],具體如圖1所示。掃描后的點云結果可以用軟件計算出采空區的體積、表面積、高度等參數,具體如圖2所示。

圖1 采空區中段利用叉車探入探桿掃描
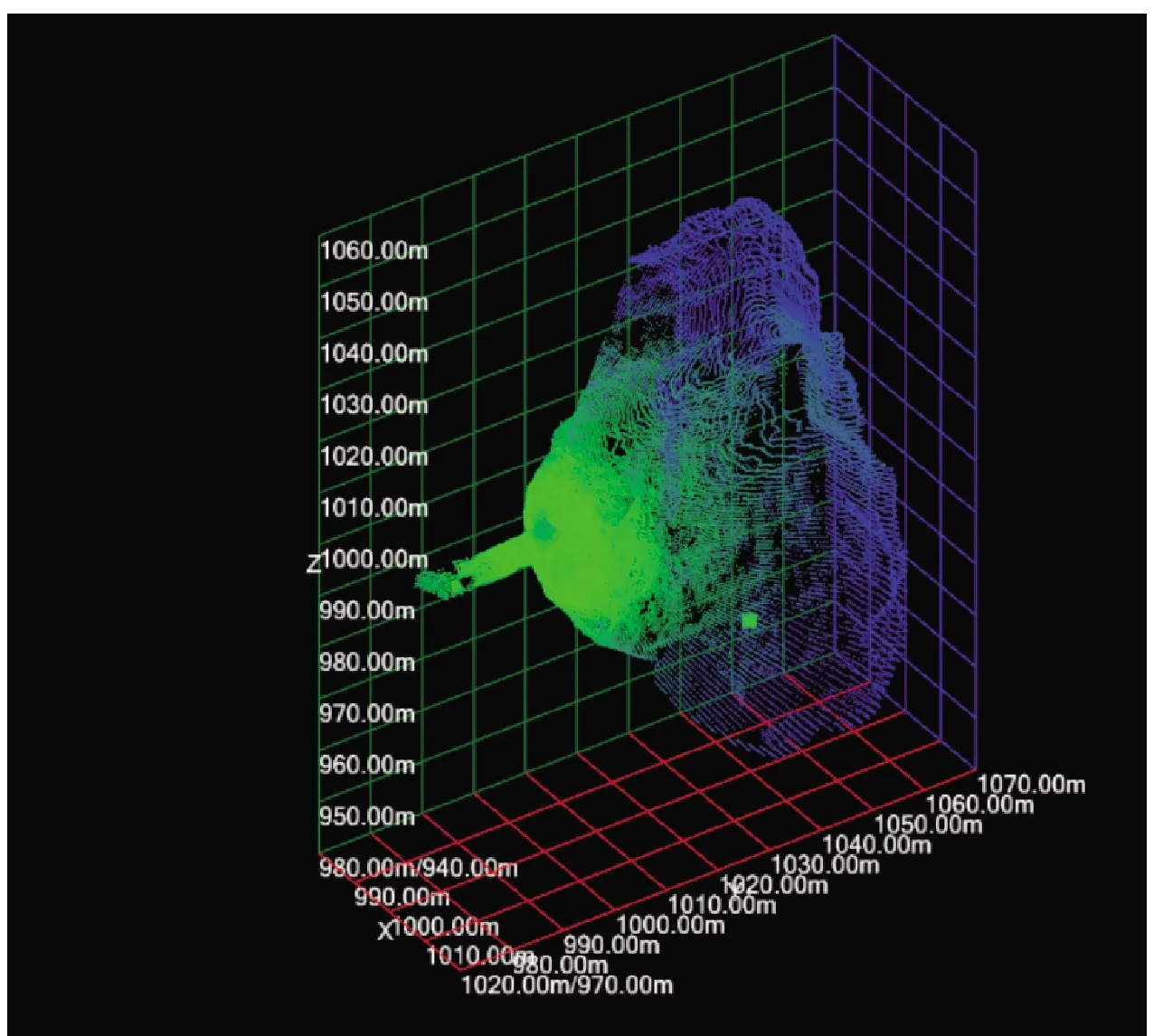
圖2 采空區三維點云數據
3.2 巷道掃描
礦井地下巷道的三維激光掃描相對于對采空區的掃描要更加容易操作。采用手持式或背包便攜式三維激光掃描儀即可對巷道內部空間進行720°全景掃描,快速準確的獲得高質量的三維空間掃描數據,三維實景圖如圖3所示。一般情況下,操作員只需手持或背包掃描儀在巷道中進行掃描即可獲取巷道點云數據。在掃描作業前,由于地下巷道空間結構復雜,儀器設備一次性工作時間有限,為了避免走重復路線,節省掃描作業時間,在掃描作業前,需要對掃描的行進路線和掃描進程做合理的規劃。在掃描過程中,路過的工人和車輛,巷道里的水氣、霧氣以及粉塵都是干擾因素。在掃描行進過程中首先要對井下的情況做好預判,如果遇到來往的工人和車輛在不可避免的情況下可以將掃描儀的掃描盲點背對移動物,避免掃描到非采集對象[4]。如果井下霧氣或粉塵過重影響激光掃描儀的工作,目前在數據采集過程中還沒有好的解決辦法,但在可在后期對點云處理的過程中進行去噪或補點等操作來完善模型,具體如圖4所示。總體來說,礦井巷道環境密閉,巷道墻壁粗糙色暗,是三維激光掃描測量的絕佳工作環境。
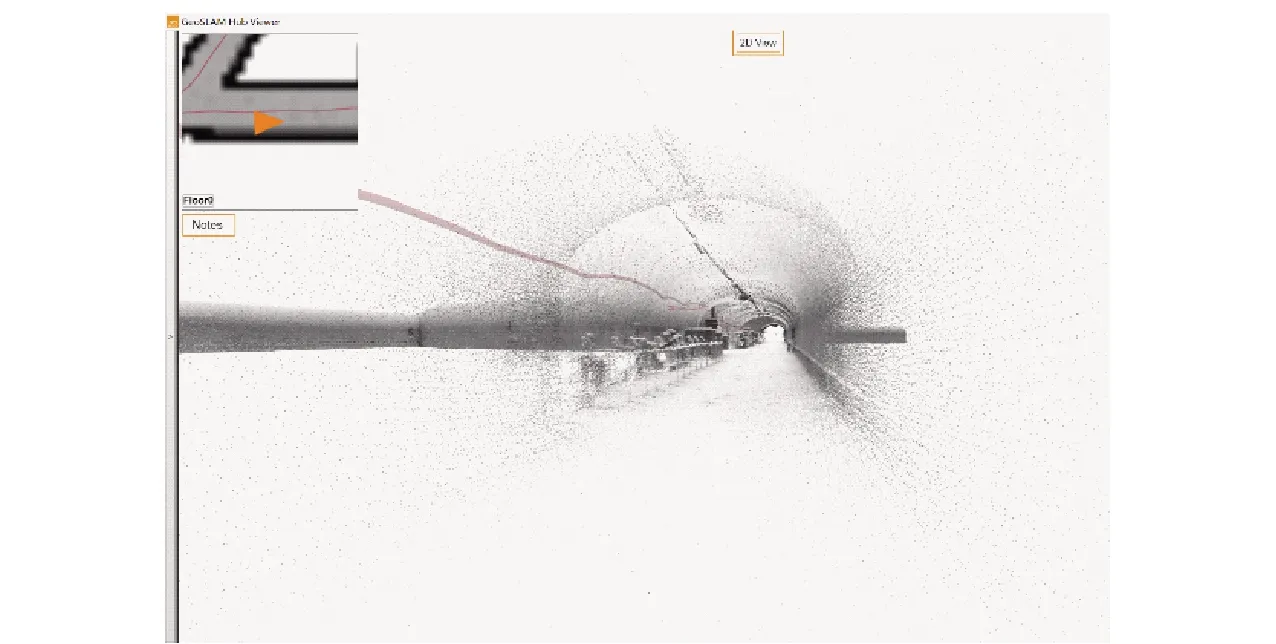
圖3 巷道內部三維實景圖

圖4 巷道3D模型
3.3 露天礦坑及礦區掃描
由于露天礦坑占地面積大,環境開闊,礦區內建筑物高大以及工業設施多樣性,采用傳統的現場量測很難準確完成測繪。采用無人機搭載激光雷達替代傳統測量是必由之路,通過自動或者手動控制無人機的方式,對地物進行飛行掃描測量可以快速獲得高精度點云。利用無人機搭載激光雷達方式,首先要做好外業踏勘,綜合考慮地形地貌、續航時間、測區面積等因素,然后對航線進行優化設計。無人機搭載激光雷達是對地上復雜環境快速精確測量的利器,是實現對露天礦區三維建模最有效方法[5],具體如圖5所示。

圖5 無人機掃描邊坡點云數據
3.4 后期點云拼接
礦區構成成分復雜,對礦區地上地下、室內室外等不同場景采用的不同測量設備,各種設備采集的點云數據都是獨立的,需要對不同場景的點云進行拼接才能獲得一幅完整的礦區點云模型。通常情況下,點云模型的拼接有兩種方法。一種方法是在掃描過程當中掃描出兩個銜接場景的公共區域,后期拼接點云時找到公共部分并進行拼接;另一種方法是加入坐標點,在掃描的過程中同時測量出物體的相應坐標,在后期處理時利用坐標來實現多個場景的拼接。在掃描過程中,如果發生了掃描遺漏點或盲區點的情況,如無人機高空激光掃描作業中,地面高大的房屋或樹木對目標物造成了遮擋會產生盲區。后期發現這種情況后,可采用手持式掃描儀對缺失部分進行人工補點掃描。多種設備配合工作來實現對整個礦區的點云數據進行搭建,也是點云拼接的重要技術手段。
4 結論
三維激光掃描技術能夠為礦山生產和未來發展提供有力的技術支撐。三維激光掃描以及三維建模技術已經廣泛的用于許多行業,如智慧工廠、VR博物館、VR景點漫游、房地產營銷等,都為行業帶來了很好的經濟效益。采礦類傳統行業也應當與時俱進,吸收新的技術和理念,讓新技術助力礦山生產向著無人化和智能化發展。
猜你喜歡
現代礦業(2021年12期)2022-01-17 07:30:32
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
