箭載SINS快速自對準技術
2019-02-10 08:54:12王海鷹石志華裴忠海劉懿龍
導航與控制 2019年6期
王海鷹,石志華,裴忠海,金 龍,劉懿龍
(上海航天控制技術研究所,上海200233)
0 引言
隨著陀螺和加速度計精度的不斷提高,箭載捷聯慣導系統(Strapdown Inertial Navigation System,SINS)逐漸采用自對準技術替代傳統水平對準+光瞄方案。運載火箭一般依托塔架豎立發射,初始自對準采用凝固慣性系粗對準[1]+Kalman濾波精對準方案[2]。粗對準僅進行一次運算,為精對準提供初始姿態。在靜基座條件下,慣導系統可觀測性弱,Kalman濾波器方位通道收斂緩慢[3]。
為滿足火箭快速發射的背景需求,需要提升自對準快速性。文獻[4]提出了一種利用逆向導航技術進行旋轉自對準的方法,這種方法在粗對準和精對準階段均使用了所有測試數據,在有限的對準時間內最大程度保證了對準精度,較好地解決了對準精度和對準時間的矛盾。但是該方法對箭載計算機存儲空間和計算速度要求極高,工程實用性較低。文獻[5]對回溯式自對準方法進行了改進,采用關鍵數據進行回溯自對準運算,大大降低了對箭載計算機存儲空間的要求,減少了運算次數。但該方法仍要求箭載計算機在短時間內進行大量運算,實現困難。文獻[6]提出了一種基于FIR和IIR低通濾波器的箭載SINS桿臂效應頻域處理方法,通過對加速度計信息進行濾波運算,有效去除了有害桿臂的加速度信息,實現了存在桿臂效應的SINS快速高精度的粗對準。該方法會在加速度信息中引入時延,并且未能解決Kalman濾波器方位通道收斂緩慢與自對準快速性要求的矛盾。

1 凝固慣性系自對準基本算法
凝固慣性系自對準算法是根據重力加速度g在慣性坐標系內的運動軌跡為圓錐面,其運動包含了地球自轉軸的方向信息的原理,通過解析法得到箭體姿態角實現的。該方法能夠有效隔離外界的晃動,但隔離不了由于桿臂效應引起的有害加速度干擾。
該算法將姿態矩陣分解為5個矩陣進行計算

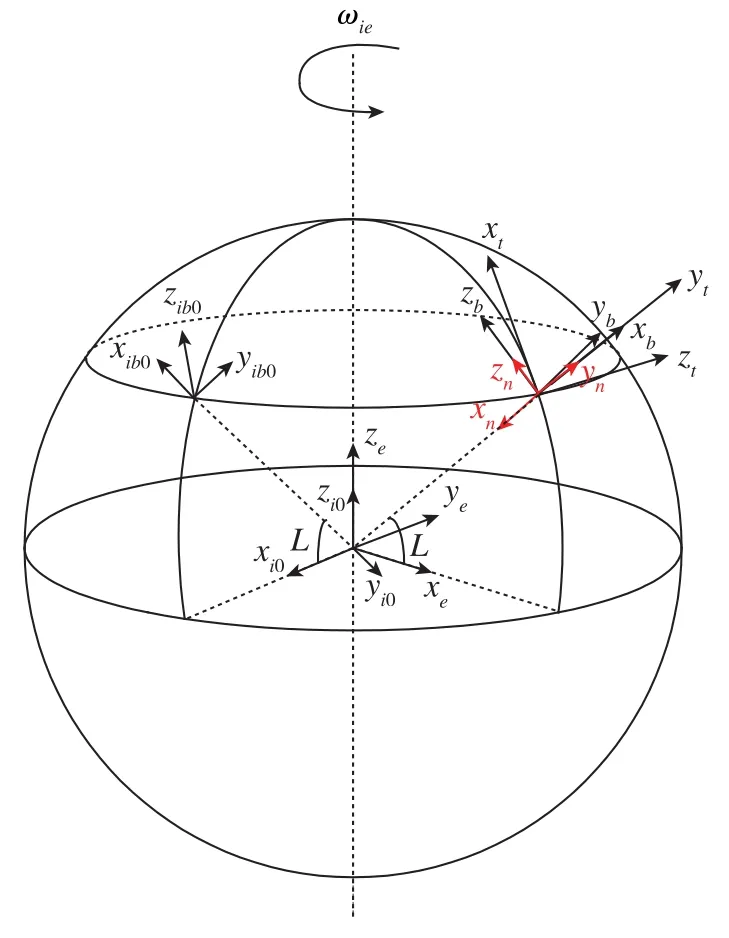
圖1 自對準過程中定義的各坐標系間位置關系Fig.1 Position relationship among coordinate systems defined in self-alignment
2 移動窗雙矢量構造
在移動時間窗口[nT-T1nT]內,雙矢量在ib0系和i0系的投影表達式如下




3 低通濾波
火箭一般采用豎立靜止發射,如圖2所示。但由于外部風干擾,箭體往往不能保持豎直靜止狀態,而是微幅晃動。慣組安裝位置相對搖擺點存在桿臂,因此會在加速度計輸出中引入周期變化的有害加速度信息,這是凝固慣性系自對準的主要誤差源之一[8]。
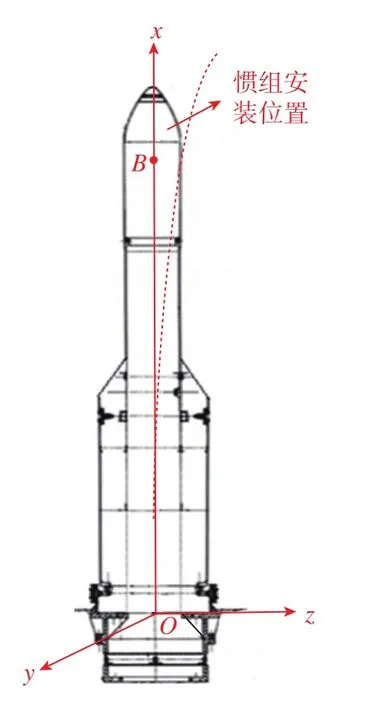
圖2 箭體搖擺示意圖Fig.2 Schematic diagram of rocket swing


低通濾波器輸入輸出關系如下

式(4)中,am、bl是待確定的濾波器參數,M為濾波器階數。
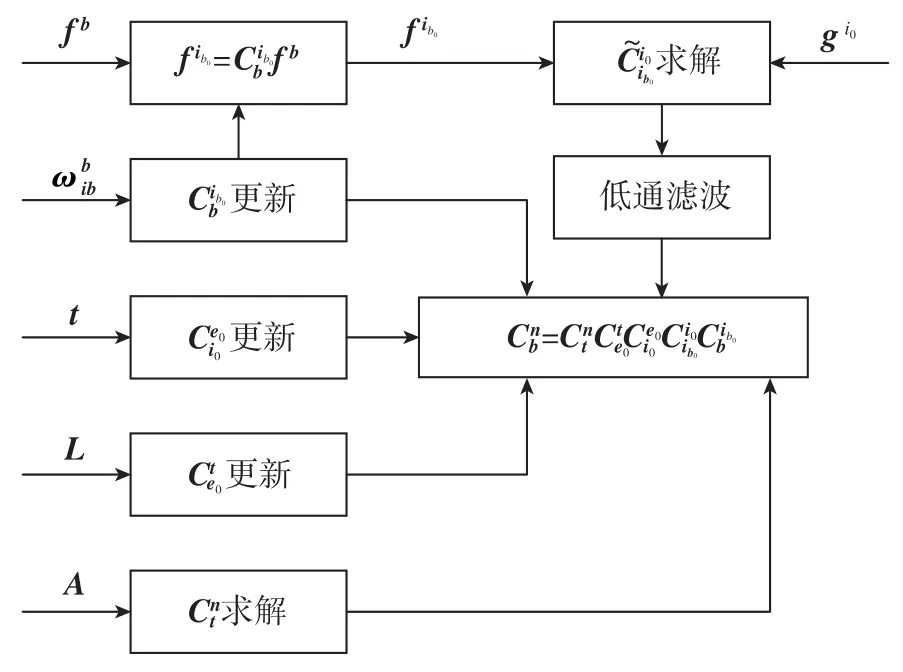
圖3 基于低通濾波的自對準算法框圖Fig.3 Block diagram of self-alignment based on low-pass filter
4 算法驗證
4.1 數字仿真驗證
數字仿真中,SINS陀螺常值漂移和隨機漂移均取為0.03(°)/h,加速度計常值偏置和隨機偏置均取為0.1mg。設定箭體處于微幅晃動狀態,俯仰和偏航通道理論姿態取值如式(5)所示。其中,A?和 Aψ均取為0.2°,f?和 fψ均取為 0.35Hz。基于以上條件,模擬生成捷聯慣組陀螺和加速度計脈沖進行自對準解算,仿真周期T取為0.02s,T1取為200s,T2取為100s。基于低通濾波的凝固慣性系自對準仿真結果與理論值偏差如圖4所示,Kalman濾波精對準仿真結果與理論值偏差如圖5所示。

由仿真結果可以看出,在3σ誤差條件下,Kal?man濾波精對準方位精度需要500s才能收斂到均值附近,基于低通濾波的凝固慣性系自對準偏航通道收斂最慢,需要100s,收斂時間縮短了80%。兩種方案三通道穩態精度均值基本相當,凝固慣性系自對準滾動通道波動較Kalman濾波精對準大。
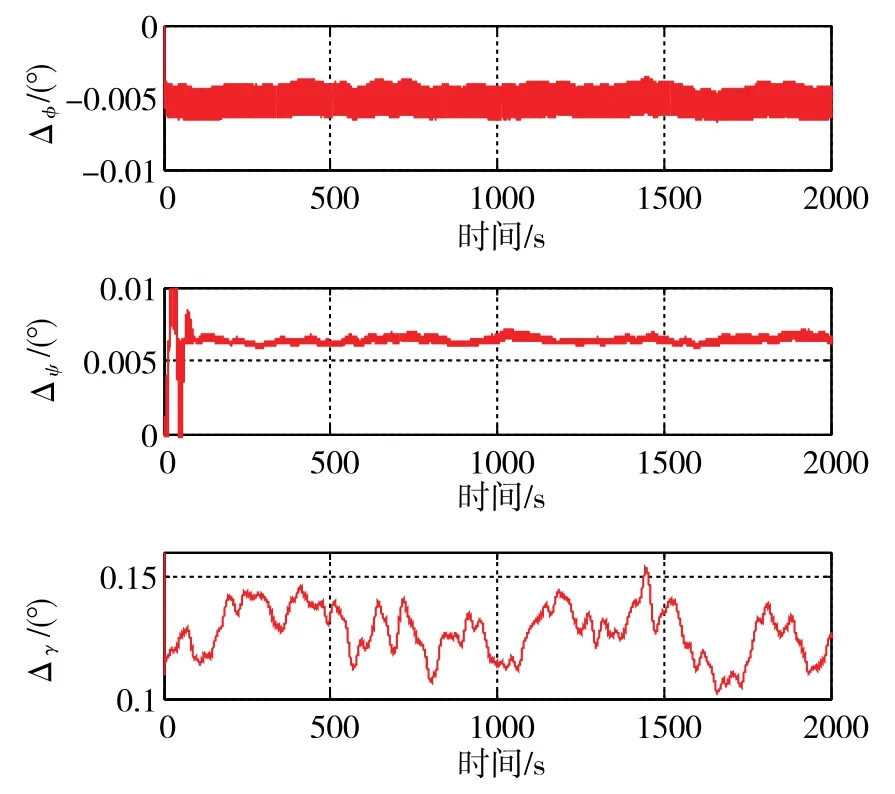
圖4 采用低通濾波器的對準結果Fig.4 Alignment results with low-pass filter

圖5 采用Kalman濾波的對準結果Fig.5 Alignment results with Kalman filter
4.2 試驗數據驗證
試驗采用一般火箭發射環境,箭體依托塔架豎立,捷聯慣組安裝于儀器艙內,將全自主對準運算結果與水平對準+光瞄方案結果作差。凝固慣性系自對準結果偏差如圖6所示,Kalman濾波自對準偏差如圖7所示。
由試驗數據運算結果可以看出,兩種方案三通道對準精度相當,俯仰和偏航通道在10-3量級,滾動通道在10-2量級,凝固慣性系自對準滾動通道波動略大于Kalman濾波精對準方法,能夠滿足運載火箭使用要求,與數字仿真結論一致。三通道對準精度均優于數字仿真,Kalman濾波精對準收斂速度也快于數字仿真,這是因為真實慣組誤差沒有數字仿真使用的誤差大,火箭實際搖擺環境也優于仿真條件。

圖6 采用低通濾波器的對準結果Fig.6 Alignment results with low-pass filter
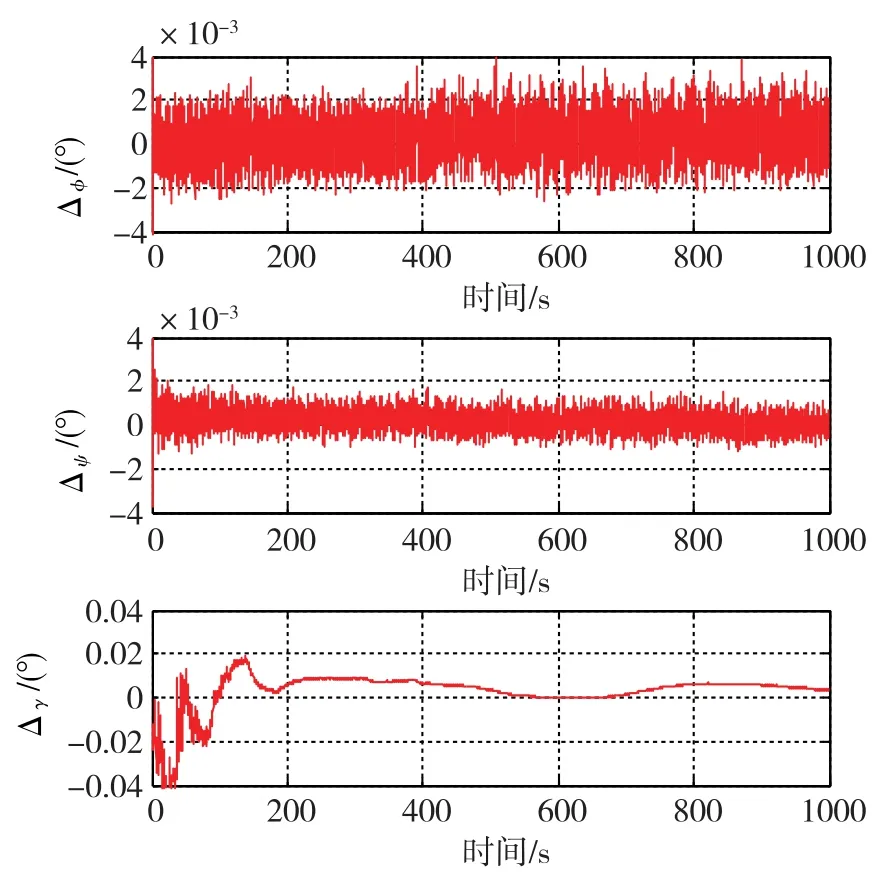
圖7 采用Kalman濾波的對準結果Fig.7 Alignment results with Kalman filter
在試驗數據條件下,基于低通濾波的凝固慣性系自對準方案三通道姿態收斂時間小于100s,較Kalman濾波精對準收斂時間縮短了50%,大大提高了自對準快速性。
5 結論
本文結合凝固慣性系自對準算法,采用基于移動窗的雙矢量構造方法,實現了自對準的實時解算。通過在凝固慣性系間姿態轉換矩陣后端進行低通濾波,有效降低了桿臂效應引起的有害加速度影響,實現了運載火箭的快速高精度對準。
仿真結果和試驗數據表明,基于低通濾波的凝固慣性系自對準與Kalman濾波精對準精度相當,驗證了算法的有效性。算法能夠在5min內實現箭載 SINS自對準,大大提高了初始對準快速性。