一種適用于跑步狀態(tài)的慣性/零速/GPS室內(nèi)外無縫組合導(dǎo)航定位方法
2019-02-10 08:54:08徐麗敏王鉦淳
導(dǎo)航與控制 2019年6期
徐麗敏,熊 智,王鉦淳,張 苗
(南京航空航天大學(xué)自動化學(xué)院,南京211106)
0 引言
隨著社會的進(jìn)步,國內(nèi)外掀起了研究行人導(dǎo)航定位技術(shù)的熱潮。目前,較為成熟的行人導(dǎo)航定位服務(wù)系統(tǒng)主要依賴于GPS[1]。針對大型商場、地下車庫、消防救援等應(yīng)用場景,GPS往往無法正常工作,這將給人類的日常生活帶來不便,甚至導(dǎo)致巨大的財(cái)產(chǎn)損失和人員傷亡。
針對GPS信號易受干擾的特性,基于微機(jī)電系統(tǒng)(Micro Electro Mechanical System,MEMS)的自主式慣性定位導(dǎo)航系統(tǒng)應(yīng)運(yùn)而生并迅速發(fā)展[2]。其中,第1種方法為航位推算算法(Pedestrian Dead Reckoning,PDR),即利用慣性傳感器數(shù)據(jù)信息實(shí)時檢測出行人行走的步數(shù),通過預(yù)測的每步步長及利用磁傳感器與陀螺儀估計(jì)的航向角共同決定行人的位置。第2種方法則是基于捷聯(lián)解算的行人導(dǎo)航算法,即將慣性傳感器固定在行人的足部、腿部、腰部等位置,通過處理輸出的加速度與角速度值,預(yù)估行人的姿態(tài)信息和位置。其中,F(xiàn)ox?lin[3]最早提出了在行人足部位置放置慣性傳感設(shè)備的行人導(dǎo)航定位系統(tǒng)。該系統(tǒng)采用零速更新算法進(jìn)行零速修正,能夠抑制慣性系統(tǒng)的誤差,但不能滿足高精度定位的要求,且成本高昂,不利于推廣應(yīng)用。哈爾濱工程大學(xué)團(tuán)隊(duì)[4]提出了一種僅僅適用于緩慢行走場景的、基于足部的IMU/GPS組合導(dǎo)航系統(tǒng),其驗(yàn)證試驗(yàn)在開闊的操場上進(jìn)行,雖定位精度較好,但適用局限性較大。同時,近年來,國內(nèi)外專家學(xué)者主要針對行人正常行走步態(tài)下的行人導(dǎo)航定位方法[5?6]及零速檢測方法[7?8]進(jìn)行了相關(guān)研究,針對跑步狀態(tài)下的行人導(dǎo)航定位及零速檢測方法的研究較少。而在救援等應(yīng)用場景下,人體多為跑步步態(tài)。另外,在室內(nèi)外過渡點(diǎn)進(jìn)行定位的精度低,不能平滑自動切換。因此,針對行人跑步室內(nèi)外無縫組合的導(dǎo)航定位技術(shù)亟待研究。
針對以上不足,本文分析了行人在跑步狀態(tài)下的運(yùn)動特性,提出了一種適用于行人跑步狀態(tài)的綜合零速檢測方法,研究了基于Kalman濾波的行人跑步零速修正算法(Zero Velocity Update,ZUPT),并提出了1種基于BP神經(jīng)網(wǎng)絡(luò)的GPS可用信號篩選方法。最后,基于上述分析研究提出了1種適用于跑步狀態(tài)的慣性/零速/GPS室內(nèi)外無縫組合導(dǎo)航定位方法,實(shí)現(xiàn)了行人跑步狀態(tài)下室內(nèi)外無縫組合導(dǎo)航定位。
1 行人跑步零速檢測方法及GPS篩選方法
本文采用捷聯(lián)慣性導(dǎo)航解算算法,將慣性測量單元(Inertial Measuring Unit,IMU)固定在行人腳面上,省去了機(jī)電式的慣性平臺,其體積與質(zhì)量較平臺慣導(dǎo)大大減小,具有較高的靈活性與可靠性[9]。捷聯(lián)慣性導(dǎo)航解算算法包括姿態(tài)解算、位置解算和速度解算,如(1)式所示。

1.1 行人跑步狀態(tài)的零速檢測方法
在正常跑步狀態(tài)下,行人的足部與地面存在一個相對靜止的瞬間,即零速區(qū)間。將慣性測量元件固定在行人腳面上,行人在跑步運(yùn)動狀態(tài)下的實(shí)測慣性傳感器數(shù)據(jù)如圖1和圖2所示。

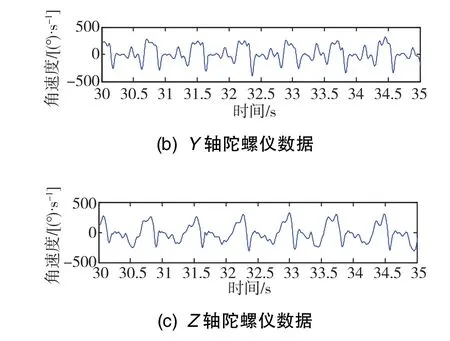
圖1 陀螺儀三軸數(shù)據(jù)Fig.1 Data of tri-axial gyroscope
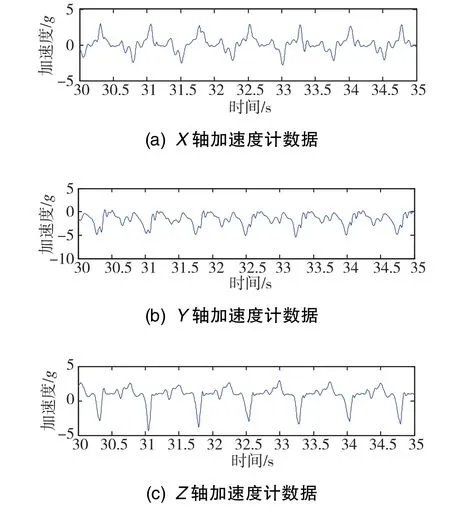
圖2 加速度計(jì)三軸數(shù)據(jù)Fig.2 Data of tri-axial acceleration
由圖1和圖2可知,三軸加速度與三軸角速度數(shù)據(jù)具有周期性,且跑步較步行運(yùn)動狀態(tài)更為劇烈,傳感器的晃動將導(dǎo)致零速區(qū)間短且不穩(wěn)定。針對跑步狀態(tài),本文零速檢測的條件如下:
(1)加速度模值與重力加速度的差值及其標(biāo)準(zhǔn)差

式(2)、式(3)中,fkx、fky、fkz為第 k時刻加速度計(jì)采集得到的比力信息,g為重力加速度,ωkx、ωky、ωkz為第k時刻陀螺儀采集得到的角速度信息,n為方差計(jì)算區(qū)間大小,則有
式(5)~式(8)中,λ1、λ2、λ3與λ4分別為4 種零速檢測方法的標(biāo)志位,εa1、εa2與 εw1、εw2分別為ak、σ1k、gk、σ2k所對應(yīng)的判別閾值。其中,閾值εa1、εa2與 εw1、εw2是根據(jù)多組試驗(yàn)中的 ak、σ1k、gk、σ2k曲線與所對應(yīng)的零速區(qū)間的對比分析而得到。
圖3為4種零速檢測方法的檢測結(jié)果對比曲線,圖 3(a)、圖 3(b)與圖 3(d)均存在誤判現(xiàn)象。本文同時針對不同路徑分別進(jìn)行了多次試驗(yàn),其對比結(jié)果如表1所示。
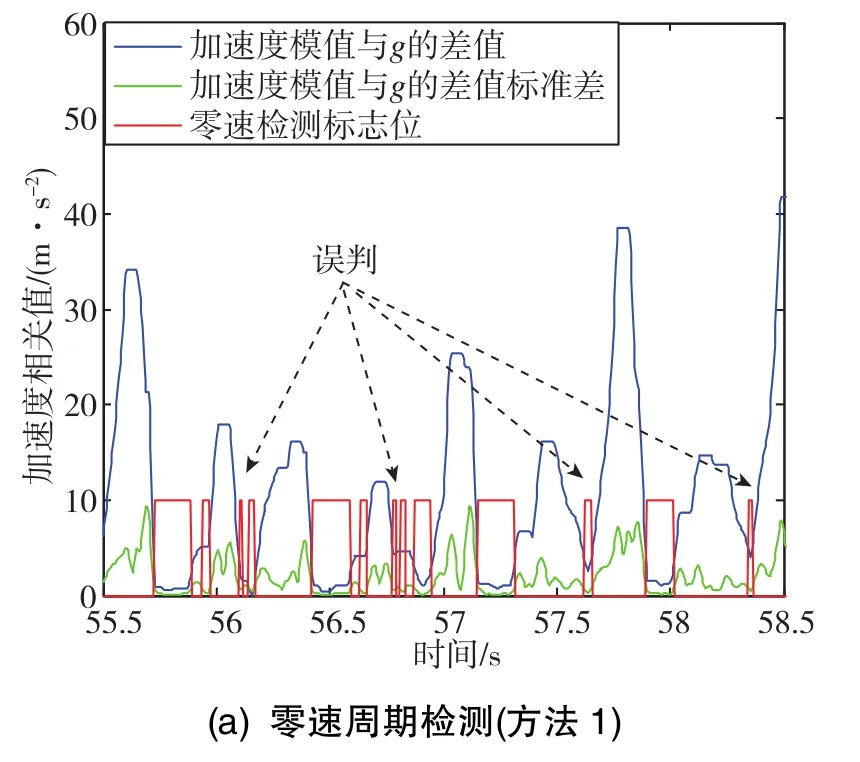
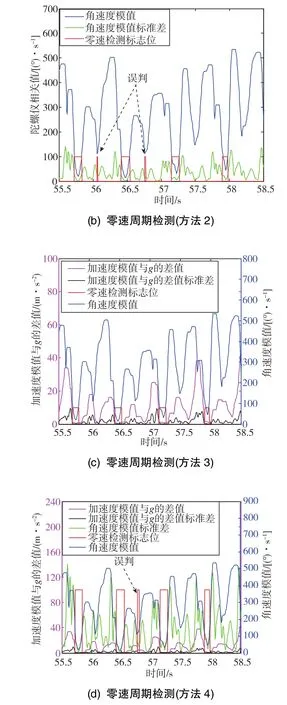
圖3 4種零速檢測方法的結(jié)果圖Fig.3 Diagram of four zero velocity detection methods
由表1可知,方法3的檢測準(zhǔn)確率最高,同時受變量的約束較少,穩(wěn)定性較好,故采用基于加速度模值與重力加速度的差值ak、該差值的標(biāo)準(zhǔn)差σ1k、角速度模值gk的組合方法進(jìn)行零速檢測。
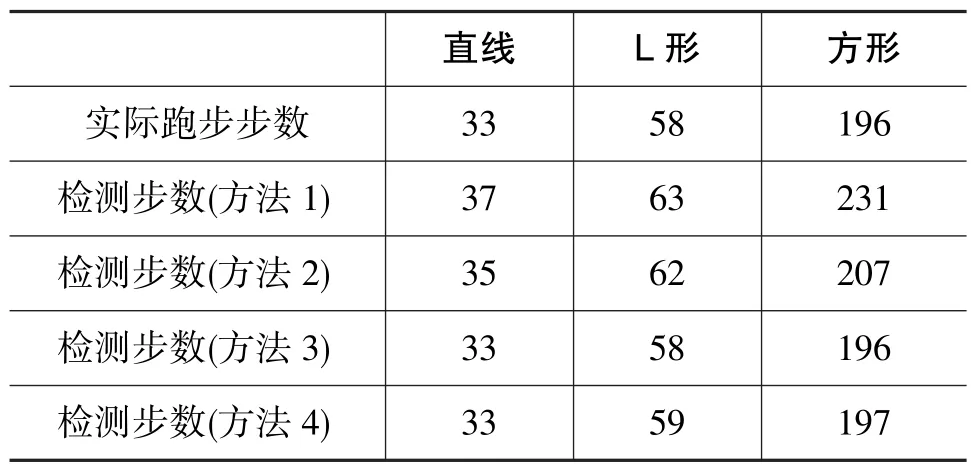
表1 4種零速檢測方法的檢測步數(shù)結(jié)果Table 1 Statistical results of four zero velocity detection methods
1.2 基于BP神經(jīng)網(wǎng)絡(luò)的GPS可用信息篩選方法
GPS在開闊的室外環(huán)境下精度較高,但信號容易受到高樓、高架等環(huán)境的干擾。為提高組合導(dǎo)航定位的精度,需對GPS信息進(jìn)行篩選。傳統(tǒng)的GPS可用信息篩選方法主要以特征量(如PDOP值)作為依據(jù),較為片面化。針對傳統(tǒng)篩選方法的局限性,本文提出了一種基于BP神經(jīng)網(wǎng)絡(luò)的GPS可用信息篩選方法。
本文構(gòu)建了 “4輸入1輸出”與 “4個隱藏節(jié)點(diǎn)” 的神經(jīng)網(wǎng)絡(luò),4個輸入為Δp、Δv、Δh和pd,分別代表GPS的位置變化量、速度變化量、航向角變化量及PDOP值。1個輸出為flag,代表GPS的標(biāo)志位(1代表有效,0代表無效,即誤差較大)。BP神經(jīng)網(wǎng)絡(luò)的架構(gòu)如圖4所示。
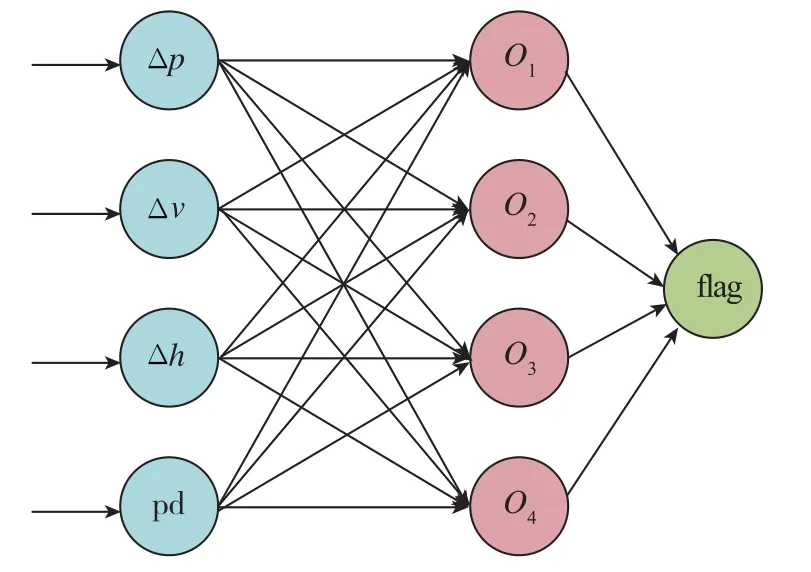
圖4 BP神經(jīng)網(wǎng)絡(luò)的架構(gòu)Fig.4 Structure of BP neural network
利用評估準(zhǔn)確的GPS數(shù)據(jù)對該BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,BP神經(jīng)網(wǎng)絡(luò)預(yù)測誤差曲線如圖5所示。由于網(wǎng)絡(luò)輸出為標(biāo)志位flag(非0即1),將實(shí)時輸出flag與真實(shí)flag做差并取其絕對值,則形成的誤差非0即1。輸入實(shí)時GPS的位置變化量、速度變化量、航向角變化量及PDOP值,利用訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)輸出GPS標(biāo)志位,判斷實(shí)測GPS信息的有效性。將篩選后的有效GPS個數(shù)與實(shí)際有效GPS個數(shù)進(jìn)行比較,得到篩選結(jié)果成功的比例。具體5次試驗(yàn)的訓(xùn)練結(jié)果如圖6所示。
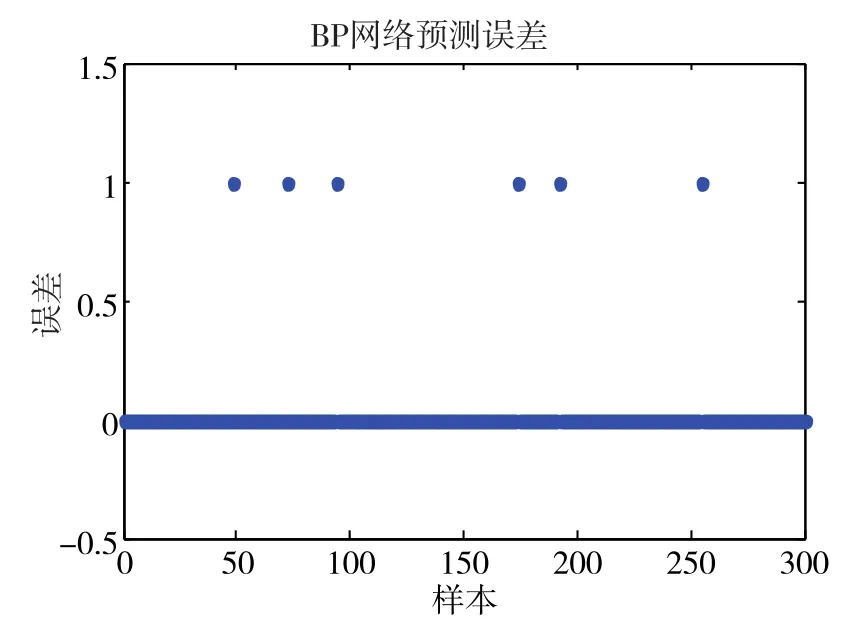
圖5 BP神經(jīng)網(wǎng)絡(luò)預(yù)測誤差曲線Fig.5 Error curve of BP neural network
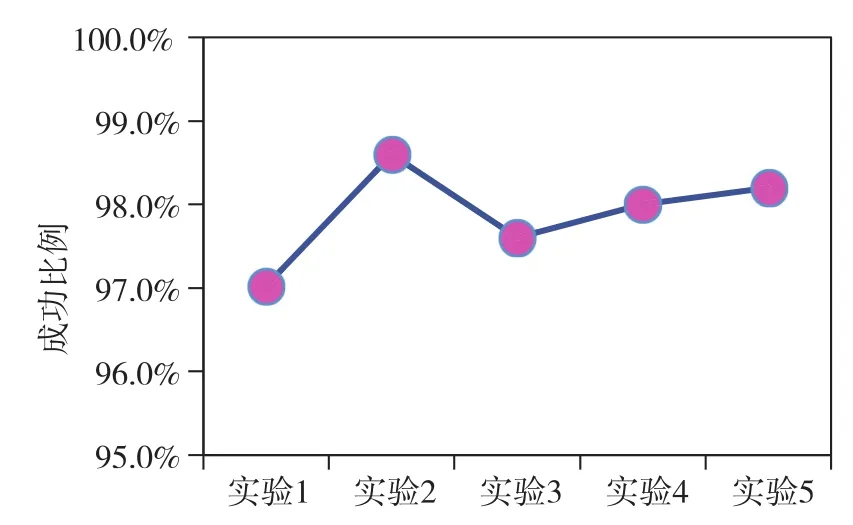
圖6 篩選結(jié)果成功比例折線圖Fig.6 Successful ratio of screening results
2 基于慣性/零速/GPS的適用于行人跑步狀態(tài)的室內(nèi)外無縫組合導(dǎo)航定位方法的實(shí)現(xiàn)
慣性/GPS組合導(dǎo)航利用具有絕對位置信息的GPS不斷地修正慣導(dǎo)誤差,以抑制慣導(dǎo)誤差的增長,同時利用慣導(dǎo)短時、高精度的特性彌補(bǔ)GPS在短時間內(nèi)的失鎖和跳轉(zhuǎn)問題,使組合后的導(dǎo)航精度得到顯著提高。
本文構(gòu)建了18維的Kalman濾波器狀態(tài)量,具體如下

式(10)中,F(xiàn)為系統(tǒng)矩陣,G為系統(tǒng)噪聲矩陣,W為系統(tǒng)噪聲。
采用可變量測模型,主要可見以下3種情況:
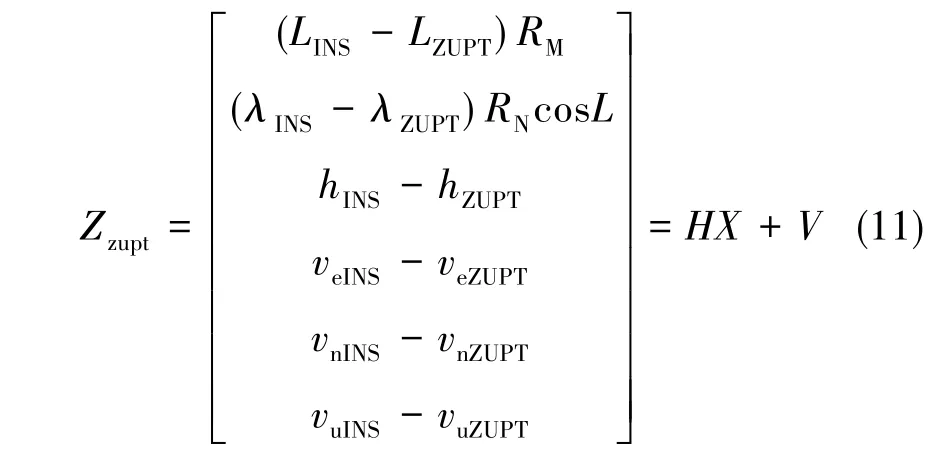
1)當(dāng)僅檢測出零速區(qū)間時,鑒于零速區(qū)間的位置不變,速度為0,6維量測信息為Zzupt,量測方程如式(11)所示,即慣導(dǎo)解算的位置信息與上一時刻慣導(dǎo)解算的位置信息的差值,以及慣導(dǎo)解算的速度信息與零速的差值。
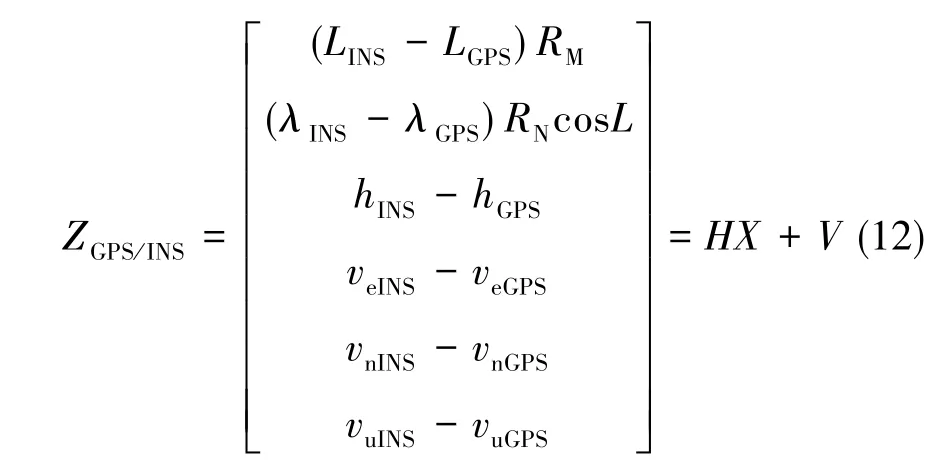
2)當(dāng)僅GPS的信息為有效時,6維量測信息為ZGPS/INS,量測方程如式(12)所示,即慣導(dǎo)系統(tǒng)與GPS接收機(jī)得到的位置信息的差值,以及兩者所得出的速度信息的差值。
3)當(dāng)零速區(qū)間與有效GPS信息同時存在時,采用 12維量測信息 [ZzuptZGPS/INS],量測方程如下
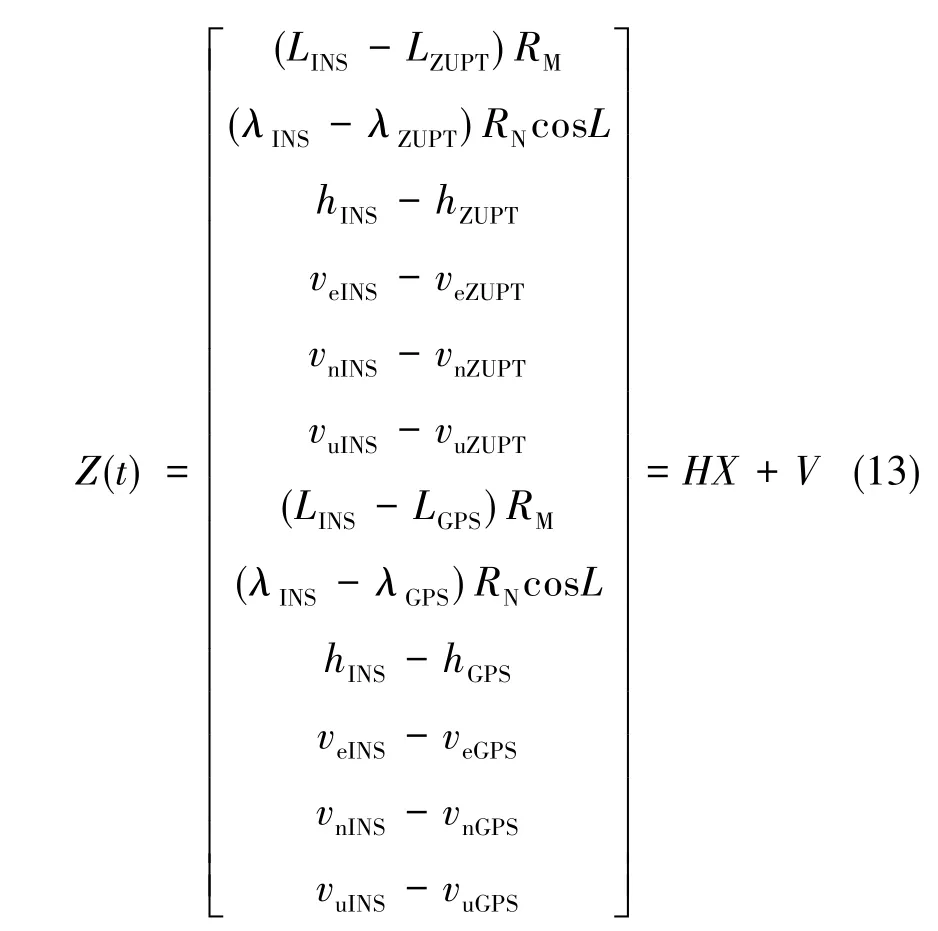
式(13)中,H為量測矩陣,V為量測噪聲矩陣,L為緯度,RM和RN分別為子午圈和卯酉圈半徑,LINS、λINS、hINS為慣導(dǎo)解算的位置信息,LZUPT、λZUPT、hZUPT為上一時刻慣導(dǎo)解算的位置信息,νeINS、νnINS、νuINS為慣導(dǎo)解算的速度信息,νeZUPT、νnZUPT、νuZUPT為零速,λGPS、LGPS、hGPS為GPS接收機(jī)所給的位置信息,νeGPS、νnGPS、νuGPS為GPS接收機(jī)所給的速度信息。
結(jié)合上述模型,組合算法的具體流程如圖7所示。
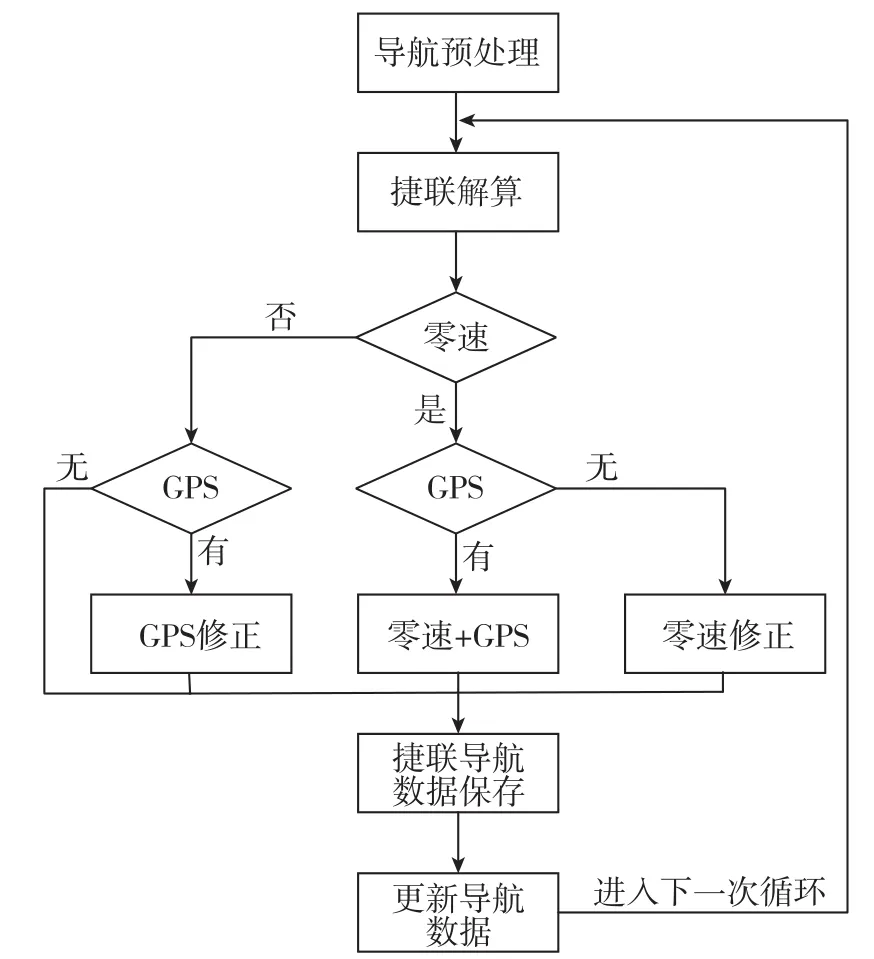
圖7 慣性/零速/GPS組合導(dǎo)航定位算法Fig.7 Integrated navigation positioning algorithm of INS/ZUPT/GPS
3 仿真驗(yàn)證
試驗(yàn)采用AHRS低成本慣性測量單元,陀螺儀與加速度計(jì)的采集頻率為200Hz。經(jīng)靜態(tài)試驗(yàn)分析得到兩者的均值與均方差,其性能參數(shù)如表2所示。
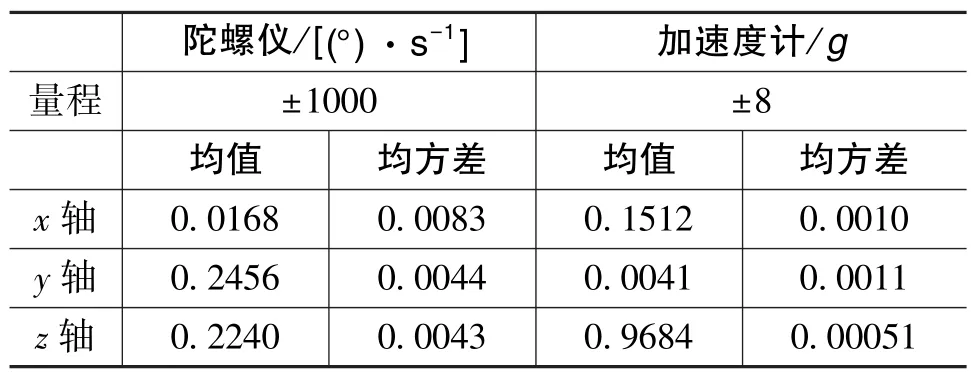
表2 性能參數(shù)Table 2 Performance parameters
分別在室內(nèi)與室外場景下進(jìn)行測試,其中2組規(guī)劃路徑如圖8所示。圖8(a)中的黃線為室內(nèi)方形,總路徑長為200.46m。圖8(b)中的黃線為室外操場方形,總路徑長為346m。室內(nèi)外過渡場景如圖8(a)中的紅色虛線所示,總路徑長為123.16m。其中,試驗(yàn)路線的相對距離由高精度激光測距儀測量而得。
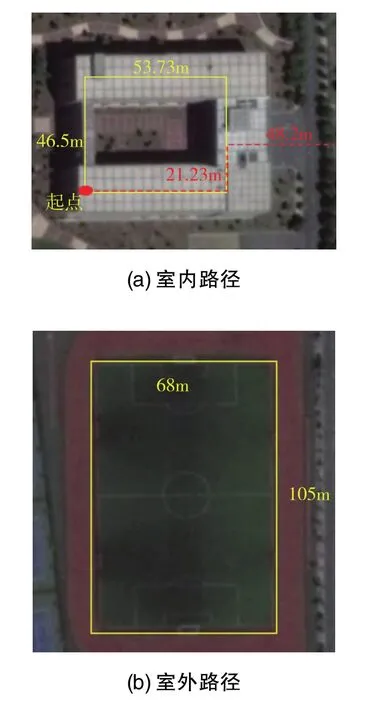
圖8 真實(shí)測試路徑Fig.8 Real testing trajectory
為對比零速檢測算法的優(yōu)劣,在捷聯(lián)導(dǎo)航解算算法的基礎(chǔ)上,加入不同的零速修正算法。如圖9(a)所示,藍(lán)色虛線表示應(yīng)用上文所提的第2種零速檢測方法的結(jié)果,紅色實(shí)線表示應(yīng)用上文所提的第3種零速檢測方法的結(jié)果,紅色軌跡基本與規(guī)劃路線相匹配,且首尾誤差約為1.5m。
如圖9(b)所示,藍(lán)色虛線表示應(yīng)用上文所提的第3種零速檢測方法的結(jié)果,綠色虛線表示應(yīng)用上文所提的第4種零速檢測方法的結(jié)果。相比較而言,藍(lán)色軌跡基本與規(guī)劃路線相匹配,誤差約為13.3m。若在加入零速修正的捷聯(lián)導(dǎo)航解算算法的基礎(chǔ)上,融合有效GPS進(jìn)行組合導(dǎo)航解算,如圖9(b)中的紅色實(shí)線所示。其與規(guī)劃路徑基本一致,同時誤差也減小到了3.13m。
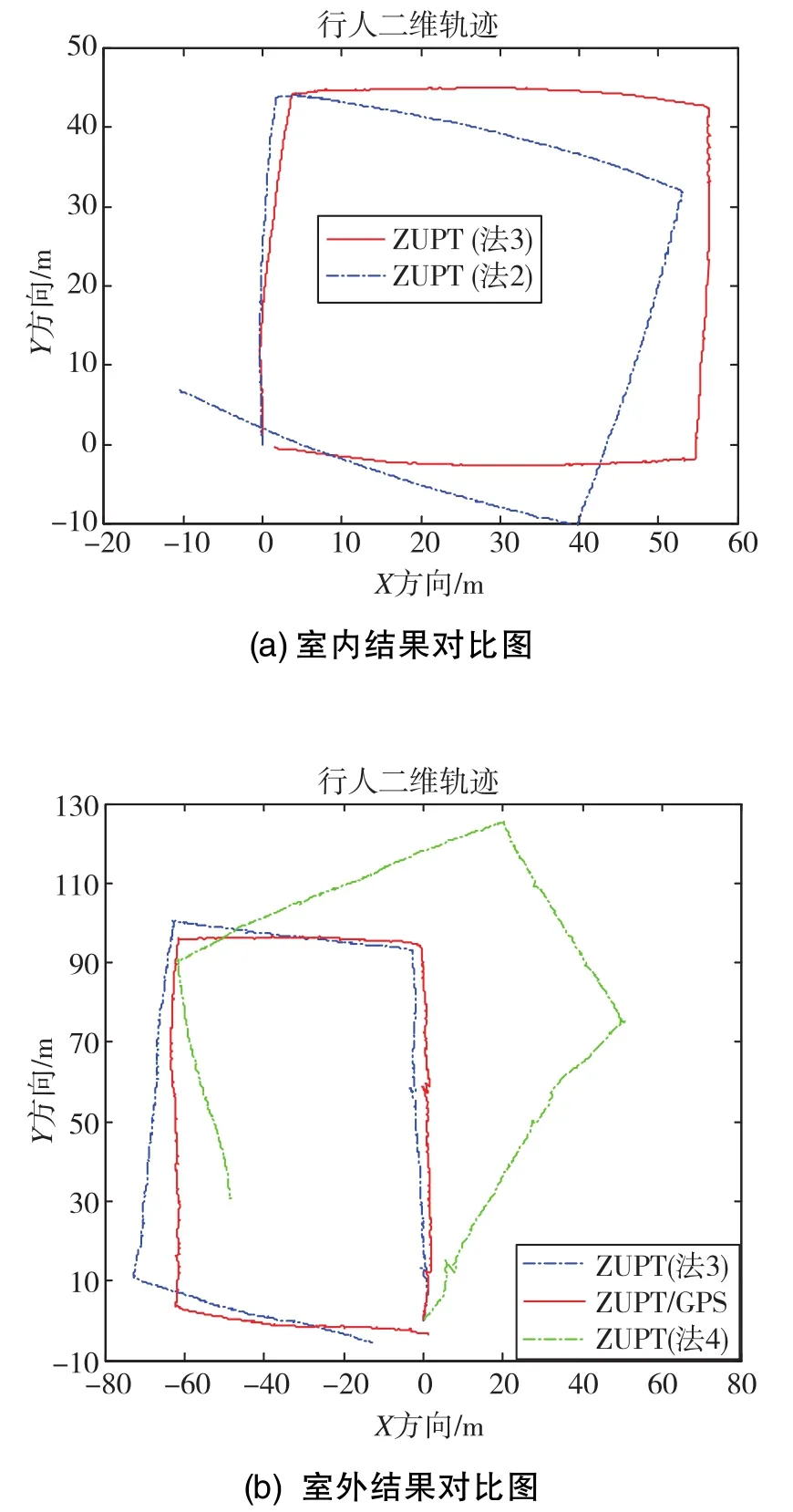
圖9 部分測試路徑Fig.9 Partial testing trajectory
圖10(a)中的黃色虛線為標(biāo)準(zhǔn)路徑,紅色實(shí)線表示與經(jīng)篩選的GPS進(jìn)行組合的結(jié)果。圖10(b)中的藍(lán)色虛線表示與未篩選的GPS進(jìn)行組合的結(jié)果。由圖10可知,紅色軌跡基本與規(guī)劃路徑一致,其路徑誤差根據(jù)實(shí)測點(diǎn)與路線起終點(diǎn)、拐點(diǎn)的平均誤差計(jì)算而得,而藍(lán)色軌跡受到GPS的誤修正,與實(shí)際的軌跡相差較大。
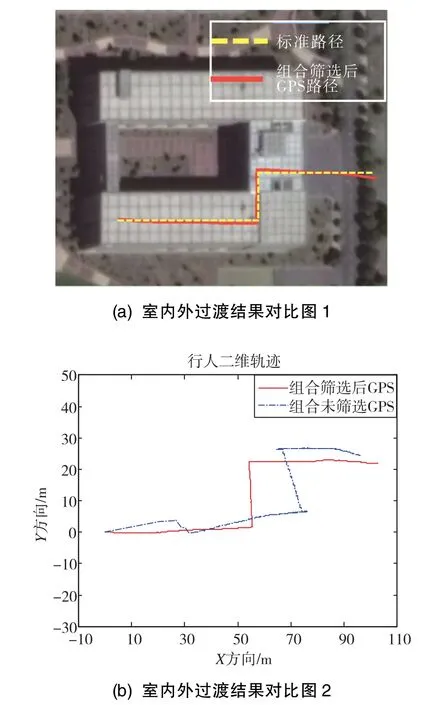
圖10 室內(nèi)外路徑Fig.10 Indoor-outdoor trajectory
表3是不同試驗(yàn)場景的誤差結(jié)果匯總表,3組試驗(yàn)的誤差比均在跑步總里程的1%以內(nèi)。
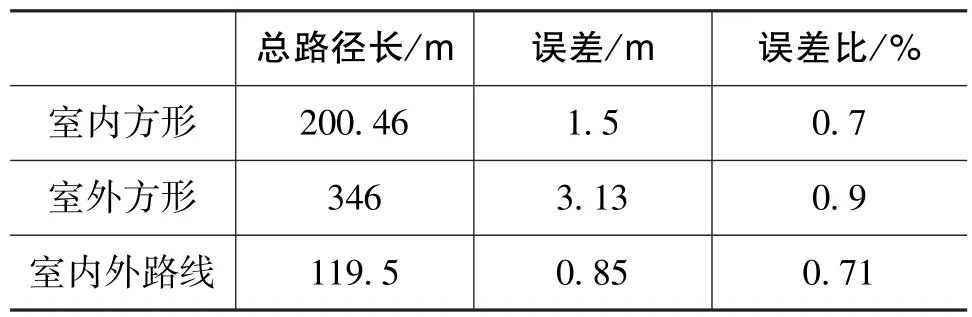
表3 誤差結(jié)果Table 3 Error results
4 結(jié)論
本文在分析了行人跑步運(yùn)動特性的基礎(chǔ)上,對比研究并提出了可靠適用的行人跑步狀態(tài)下的零速檢測方法。設(shè)計(jì)了基于BP神經(jīng)網(wǎng)絡(luò)的GPS可用信號篩選方法,增強(qiáng)了GPS信息的有效性與可靠性。本文有效融合了慣性導(dǎo)航、零速、GPS信息,通過Kalman濾波的方法進(jìn)行了誤差修正,解決了慣導(dǎo)誤差快速累積的問題。仿真結(jié)果表明,基于慣性/零速/GPS的行人跑步室內(nèi)外無縫導(dǎo)航定位算法的平均定位誤差可減小到行人跑步總里程的1%以內(nèi)。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32