基于單片機的光電循跡小車設計
2019-01-30 08:06:02楊賢聰
電子技術與軟件工程 2019年2期
關鍵詞:單片機
文/楊賢聰
1 光電循跡小車硬件結構
循跡原理設計:使用三個紅外發射與接收對管,其中一只安置于設計的循跡軌道中,另外兩個分別位于中間光電管的兩側,若小車行駛脫離了循跡軌道,將會使得兩側的光電管中的一側檢測到黑線,由設計的程序做出相應的轉向動作,使之中間的紅外管重新檢測到黑線,此時恢復正常直線行駛。
光電循跡小車主要由STC89C52RC單片機、HJIR1循跡功能單元、L298N驅動模塊、電機兩個、對應電源等構成。
循跡模塊的原理為紅外探測法,具體為利用紅外線對不同顏色的物體產生不同的反射系數的原理。紅外管在運行中不停地向地表發生紅外線,由于小車行駛在白色的既定地面,當其正對著地面之時,白色地面會產生漫反射,使光電接收管能有效接收到紅外信號,當其正對著黑色循跡線時,紅外線則被黑線吸收而使得鄰近的光電接收管不能接收紅外信號,通過LM393比較器以采集高電位或低電位,如圖1所示。
對于電機的驅動電路,我們采用H橋式驅動電路,L298N模塊集成了所需要的H橋電路結構,我們可以利用它來進行對電機的控制。單片機普遍具有PWM信號功能,利用PWM實現對L298N的信號控制,進而控制驅動電機。
具體的電機的驅動電路如圖2所示,我們使用的是一個L298N模塊對兩個主動輪的電機進行控制,通過交換電機的兩極電位以實現電機的正反轉控制,改變電平可以實現其啟動或停止,正轉或反轉。
2 程序設計
光電循跡小車的控制核心為STC89C52RC單片機,通過對單片機進行C語言的編輯和燒寫,實現其邏輯控制功能。我們使用C語言和結構化設計思路來完成。紅外管的具體邏輯為:光電接收管接收到紅外反射信號,與之對應的發射管端口會形成高電位;反之當光電接收管接收不到發出的紅外信號,即此時正對著黑色循跡軌線,與之對應的發射管端口為低電位。總體程序設計示意圖如圖3所示。
循跡小車在芯片的控制之下能夠實現電機控制功能:若使能端口enA為高電位,給芯片的管腳IN1給予低電位而IN2為高,此時控制電機為正向轉動。反之,IN1高電位IN2低電位,反向轉動;兩者同時為低電位,停止轉動工作。
3 結束語
光電循跡小車原理雖然簡單易懂,也很容易制造,且成本低廉,然而其卻是更為智能化與精確的自動駕駛小車的基礎技術與靈感來源,通過改進升級光電循跡小車的性能與智能程度,可以為未來的自動駕駛技術提供參考,并未來應用于更為智能的智能家居設備或其他消費類電子產品。除此之外,光電循跡小車的設計靈感與理論基礎還可用于更多的方面,因此改進升級光電循跡小車具有更為深遠的意義與影響。

圖1:循跡傳感器原理圖

圖2:直流電機驅動電路
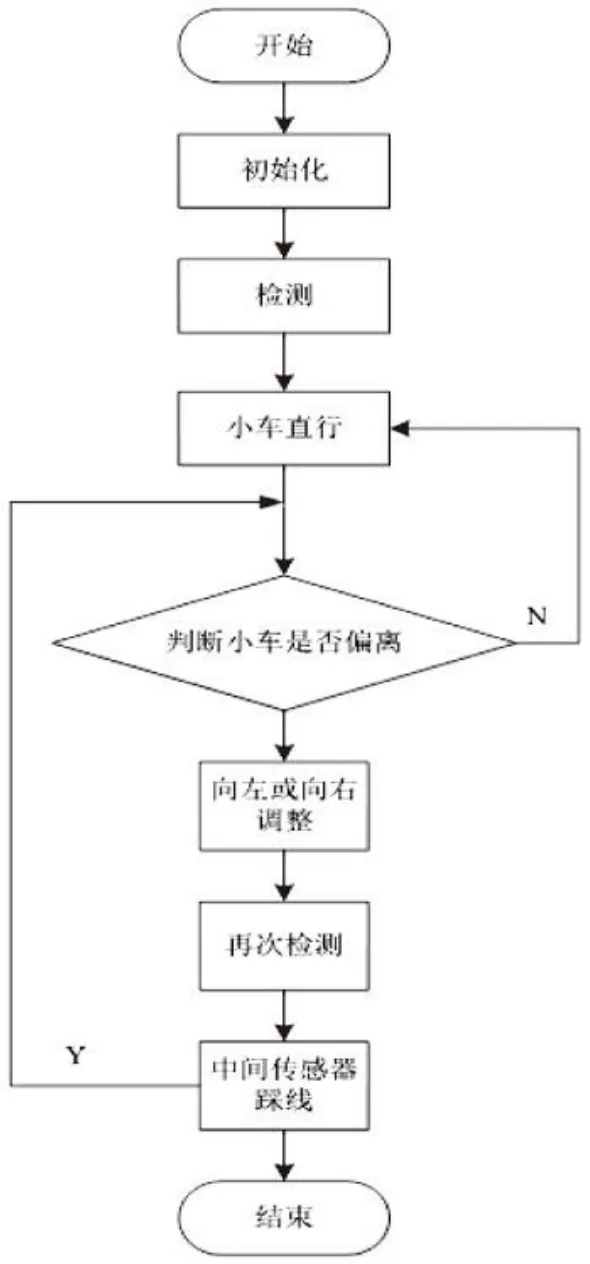
圖3:程序流程圖
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
