基于FPGA的電阻爐模糊控制器設計
2019-01-30 08:36:34張佳代小宇顧建軍
電子技術與軟件工程 2019年1期
文/張佳 代小宇 顧建軍
電阻爐是在我國應用較廣的一種被控對象,其溫度變化非線性,難以精確建模,優化這樣的系統控制性能是大多數工程師所需要解決的問題。傳統PID控制主要適用于線性控制對象,在控制這類對象時可能會出現難以控制的現象。而模糊控制是依據操控人員的經驗,通過查表來得到控制量,更加智能化。本文將以電阻爐溫控系統為引導,主要研究其核心控制器的原理及具體實現。
1 電阻爐的數學模型
電阻爐裝置是一個閉環反饋控制系統,是具有自平衡能力的對象,可用二階慣性和滯后環節來近似描述,而通過參數辨識可以將二階不振蕩系統降為一階模型,則電阻爐溫度控制系統模型的傳遞函數可以表示為:

式中K為放大系數,τ0為純滯后時間,T為時間系數。在現實的控制中,因需要考慮到種種因素,使得上述數學模型與實際非常不符,因此選用PID算法與模糊控制結合的方式對本系統進行設計。
2 電加熱爐的模糊自整定PID算法
模糊自整定PID控制基于PID算法,通過計算當前系統設定值與反饋值之間的誤差e和誤差變化率ec,在控制過程中實時計算e和ec,找出其與Kp,Ki,Kd之間的模糊關系,并查詢模糊規則表實時地輸出對應的控制量。本文用FPGA技術實現設計,需要進行離散化處理,離散的PID表達形式如下:

上式的計算可以很方便的利用FPGA中的函數模塊實現,相比于原PID公式大大減輕了計算量,加快了運算速度,提高了系統性能。
3 模糊PID算法的FPGA的實現
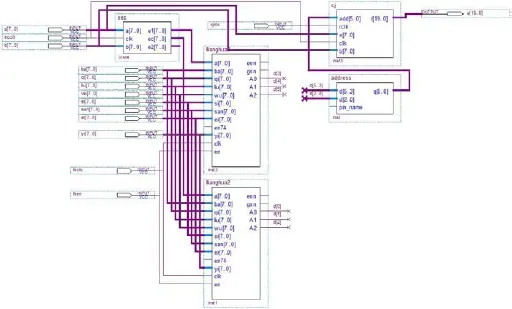
圖1:頂層電路圖
除其靈活性、高集成、低功耗的優點,本文用FPGA來實現核心控制器部分,還避免了不必要的硬件開銷,提高了系統的運行速度和可靠性。設計可分為4個模塊:誤差及誤差變化量產生模塊、模糊量化模塊、查找表模塊以及乘加模塊。
3.1 誤差及誤差變化量模塊的設計
本模塊輸入為設定值與反饋值,輸出為其誤差及誤差變化量。利用QuartusII軟件中自帶的LPM_ ADD_ SUB函數即可實現該模塊。
3.2 量化模塊的設計
量化模塊的基本思路是:首先將基本論域分為若干段,每一段對應于一個語言值,確定輸入的精確值落入哪一段,此段對應的語言值即為此精確量的量化值。利用QuartusII里自帶的LPM_ COMPARE函數模塊以及編碼器完成設計。
3.3 模糊查找表模塊
本文的模糊查找表用MATLAB離線生成,通過自帶的模糊邏輯工具箱,可以自定義設置隸屬度函數、建立模糊規則等來建立并測試模糊邏輯系統,利用仿真功能建立該系統模型,輸入所有e和ec的不同組合到該模型中求出不同情況下PID三個參數的值。

設置三個變量A,B,C如下:將A, B, C與e和ec進行特定的乘加運算,即可等價為式(2),由此將計算更加簡化。在Quartus II里用ROM模塊來存放查找表,e與ec的量化地址作為ROM的輸入。
3.4 乘法模塊和加法模塊
調用QuartusII里自帶的lpm_mult及parallel_ add函數模塊完成下式的運算:

得到最終的控制量△u。
3.5 系統頂層電路原理圖
如圖1所示。
4 結束
本文基于FPGA技術設計了模糊自整定PID控制器實現對電阻爐溫控系統的控制,設計采用線下生成查找表,實時查表計算的模糊自整定PID算法,并在QuartusII軟件上利用原理圖設計方法完成設計并且仿真,據仿真結果顯示,此設計方案可行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
