差分像運動視寧度優化監測法*
2019-01-24 03:48:46王子躍任德清
天文研究與技術 2019年1期
王子躍, 任德清
(1.中國科學院國家天文臺南京天文光學技術研究所,江蘇南京 210042;2.美國加州州立大學北嶺分校,物理與天文學系,美國加州北嶺 91330-8268;3.中國科學院大學,北京 100049)
弗洛伊德參數r0即大氣光學相干長度,是衡量一個臺址大氣視寧度的重要參數。運用差分像運動法通過測量星像相對位置的變化計算r0值,能夠有效地消除非大氣因素對大氣視寧度測量的影響,使得測量結果更加準確可靠。差分像運動視寧度監測儀是以此原理設計研制的。
現如今,在量化天文視寧度領域,最普遍的方法是差分像運動測量法,由Sarazin和Roddier兩位科學家在1990年為歐洲南方天文臺選址時提出[1]。它由一個35 cm口徑的望遠鏡和一塊有兩個子瞳的掩模組成,最后連接一塊CCD。對于經過地球大氣的單一目標光源,差分像運動視寧度監測儀測量其在望遠鏡入瞳面的兩個子瞳上的波前到達角的相對方差,求得大氣視寧度參數r0。該方法的優點是能有效消除望遠鏡由于風力載荷造成的追蹤星軌誤差、儀器抖動等非大氣因素的影響,具有足夠的時空精度,便于野外選址使用。1980年以后,很多優良臺址和新的選址工作都使用了差分像運動視寧度監測儀,例如:西班牙LaPalma天文臺選址[2],日本Subaru八米望遠鏡選址[3],國內有云南天文臺麗江高美古2.4 m望遠鏡選址[4]等。然而,差分像運動視寧度監測儀在測量過程中入瞳掩模的尺寸是固定的,所以一次曝光捕捉的圖像上只能得到一組固定子瞳間距的星像相對位移信息。
DIMM方法只能夠測量總的大氣視寧度,無法對某一層高度的大氣視寧度進行測量,而三維大氣視寧度測量是設計多層共軛自適應光學系統的前提,針對該問題文[5]于2015年提出了多子孔徑日間視寧度監測儀(Multiple-Aperture Seeing Profiler,MASP)[5],用來測量日間大氣視寧度。它由兩個口徑40 cm的望遠鏡組成,選取雙星作為導星,在0~30 km范圍分多層對大氣湍流進行分析,進而得出大氣視寧度參數r0。它可以將大氣湍流測量高度提升至30 km,等同于112 cm大口徑望遠鏡所能測量的高度。多子孔徑日間視寧度監測儀具有成本低、可移動性強等優點,尤其適合還不具有大口徑望遠鏡的新臺址。但是一般情況下,只需測量總的大氣相干長度r0,無需對多層大氣湍流進行量化,另外多子孔徑日間視寧度監測儀用到兩臺望遠鏡使得架設過程較為復雜,不便于總體大氣視寧度的測量工作。
本文提出一種名為差分像運動視寧度優化監測法:I-DIMM。該方法在差分像運動視寧度監測儀[1]的基礎上進行改良,不再采用瞳孔掩模制造子瞳的方式,而是改為在望遠鏡瞳面上選擇兩個間距20 cm的子孔徑,通過應用多子孔徑日間視寧度監測儀計算大氣視寧度參數r0的方法,對兩個子孔徑采集到的星像像差法處理,使得計算得到的r0值更為精確。此外,相較于DIMM法,I-DIMM系統通過改變兩個子孔徑之間的距離,得到不同子孔徑間距情況下的r0結果,尤其在較小子孔徑間距(1.6~3.0個子孔徑直徑距離)時,I-DIMM計算得到的r0值比DIMM法更精確。
1 I-DIMM系統描述
應用于歐洲南方天文臺選址的差分像運動視寧度監測儀光學結構[1]如圖1,傳統的DIMM系統通常在小口徑(比如180~350 mm)望遠鏡的入瞳處放置一塊有兩個子瞳(50~100 mm)的掩模,并在其中一個子瞳上放置光楔,使到達這個子瞳的波前產生傾斜,從而同一目標星經過兩子瞳后產生不重疊的雙像,最后用探測器記錄下一系列雙像的瞬時狀態,并統計雙像相對位置的方差,即可計算出視寧度。本文用于對比的傳統DIMM系統即為此結構及原理。具體參數見表1。
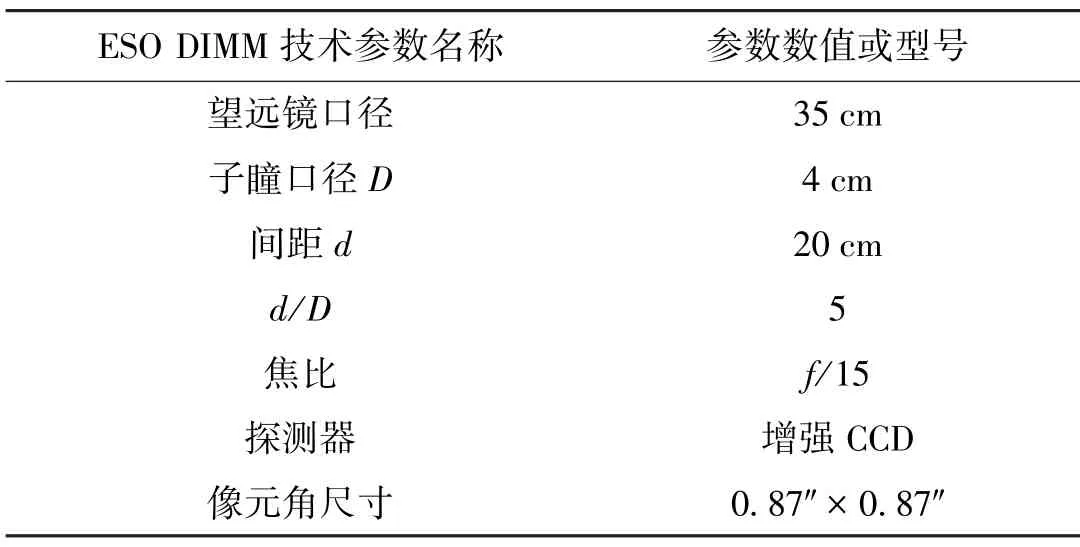
表1 歐洲南方天文臺DIMM參數Table 1 ESO DIMM Parameters
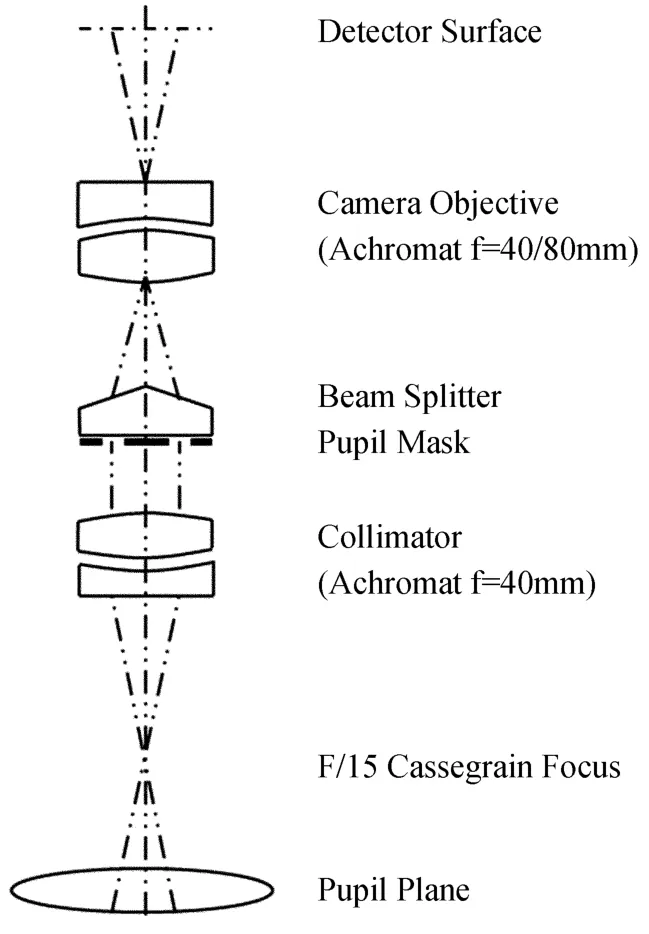
圖1 差分像運動視寧度監測儀光學系統示意圖Fig.1 DIMM Optical Scheme
本文的I-DIMM系統在模擬時采用微透鏡陣列將望遠鏡瞳面分割成多個子孔徑,如圖2。將有效的哈特曼子孔徑的線性陣列進行編號,如圖3。

圖2 I-DIMM工作流程圖Fig.2 I-DIMM workflow diagram
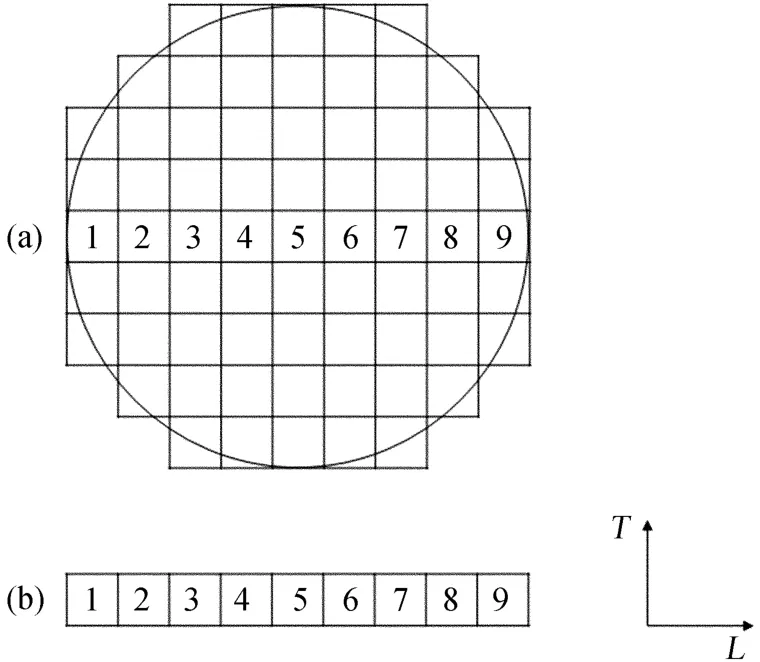
圖3 I-DIMM夏克-哈特曼波前傳感微透鏡陣列Fig.3 I-DIMM SHWFS lens let array
如圖3的I-DIMM系統中,在直徑長度上由9個哈特曼子孔徑組成,相當于將望遠鏡瞳面直徑方向上等分為9個子孔徑(如圖數字1~9),每個子孔徑的直徑4 cm,與DIMM中子瞳口徑相等(參見表1,歐洲南方天文臺DIMM參數表)。在同一行的哈特曼子孔徑陣列中,相鄰兩個數字代表的孔徑相距為一個子孔徑直徑的距離,即1D。以此類推,數字間相差為2的兩個子孔徑間距為2D,當數字間相差為5時,兩個子孔徑間距5D,相當于DIMM中兩個子瞳相距20 cm。這樣在結構模型上完成了I-DIMM系統與DIMM系統的一致與統一。對于一個固定的子孔徑間距,每一行陣列可以至少提供一種子孔徑的組合方式。以圖3(b)為例,子孔徑1與2的組合間距為1D,而子孔徑3與4的組合間距也為1D,以此類推,間距為1D可以找到8種子孔徑組合。圖4展示了直徑不同的夏克-哈特曼子孔徑組合的數量與對應的孔徑間距之間的關系。
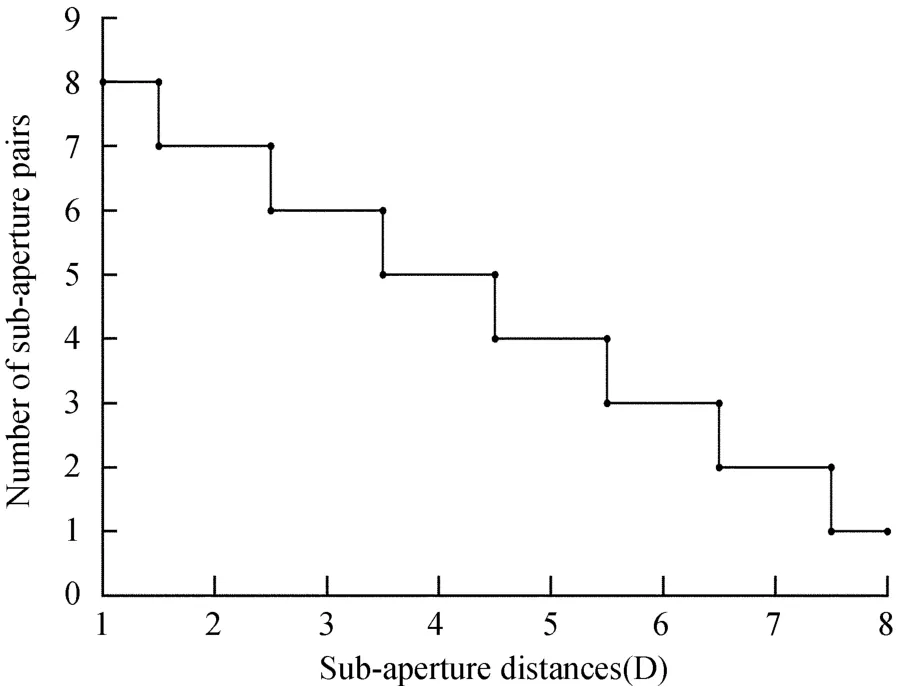
圖4 夏克-哈特曼子孔徑組合數量與孔徑間距的關系Fig.4 Number of sub-aperture pairs versus the sub-aperture distance
2 I-DIMM計算理論
傳統的DIMM法[1]中,在L方向(沿著子瞳中心連線方向)差分像位移方差的表達式為

T方向(垂直于子瞳中心連線方向)差分像位移方差的表達式為

兩者方差可以用單個孔徑的二維運動總方差σ2表示:

理論上,假設S=d/D,應用(3)式應滿足條件:S≥2。(1)、(2)式簡化為

其中
針對性訓練1:一條多肽鏈的分子式為C22H34O13N6,其徹底水解后,只得到下列下列3種氨基酸:谷氨酸(C5H9O4N),甘氨酸(C2H5O2N),丙氨酸(C3H7O2N)。則該多肽鏈徹底水解可產生多少個丙氨酸? ( )

文[1]給出的上述近似表達式已經對文[6]的表達式進行了改進,在d>D/2時能夠和文[6]給出的近似值良好匹配[1]。例如,當S=1時,沿著子瞳中心連線方向的差分像運動位移方差近似值偏差率為-0.2%,但是在垂直于子瞳中心連線的方向上,差分像運動位移方差卻偏差了-17.3%;當S=2時,垂直于子瞳中心連線方向的差分像運動位移方差依然偏差較大,有-9.0%之多。所以,為得到更精確的r0估計,本文將S趨近于0的情況也考慮其中,引用文[5]在多子孔徑日間視寧度監測儀中的近似表達式:

其中:

由于本文研究導星數量為1,且僅評估總的r0值,故θ=0,hn是望遠鏡垂直上空大氣湍流的疊加。再聯合S=d/D,(10)式、(11)式改寫為

對于方形子孔徑,文[7]指出,函數II-DIMM(i,0)和函數的定義分別為

引入函數 Comp(II-DIMM/IDIMM):當 II-DIMM/IDIMM<1時,函數值為0,即 II-DIMM<IDIMM,否則為 1,即II-DIMM>IDIMM。表2和表3給出了在兩個方向上,Fried近似值、IDIMM和II-DIMM3種r0計算方法在不同孔徑分離比下的二維運動關系偏差值。

表2 L方向3種方法在不同孔徑分離比下的二維運動關系偏差Table 2 Difference of two-dimensional motion for various aperture-to-separation ratios in longitude by three methods
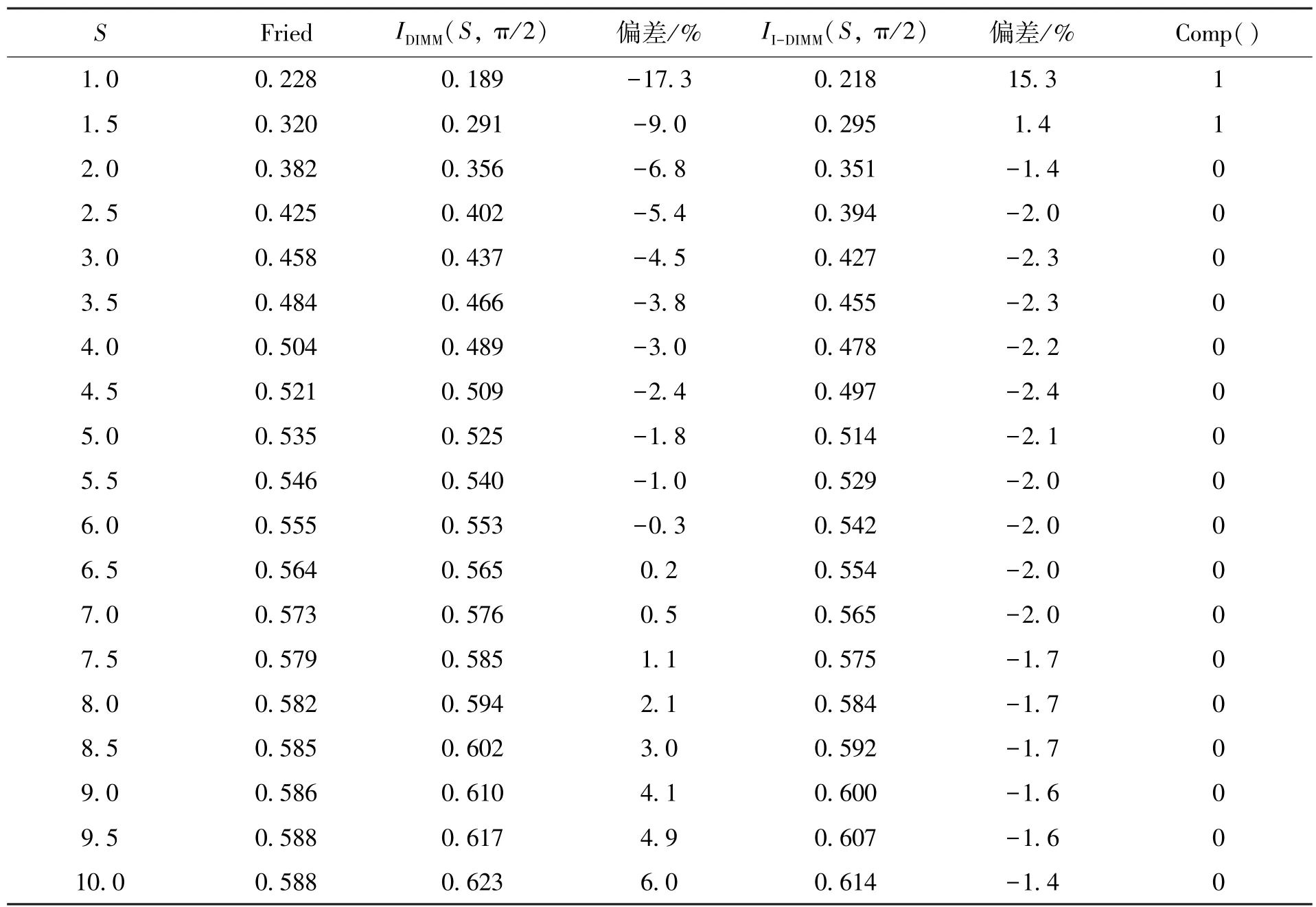
表3 T方向3種方法在不同孔徑分離比下的二維運動關系偏差Table 3 Differences of two-dimensional motion for various aperture-to-separation ratios in transverse by three methods
其中,IDIMM的偏差值是與Fried給出的近似值比較的結果,II-DIMM的偏差值是與IDIMM值比較的結果。
圖5和圖6給出了兩個方向上3種方法在不同孔徑分離比的二維運動關系曲線。
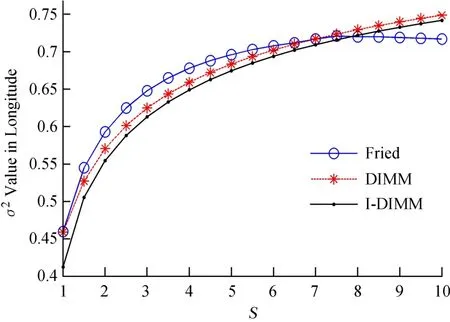
圖5 3種方法中L方向不同孔徑分離比的二維運動關系曲線Fig.5 Graphs of two-dimensional motion for various apertureto-separation ratios in longitude by three methods
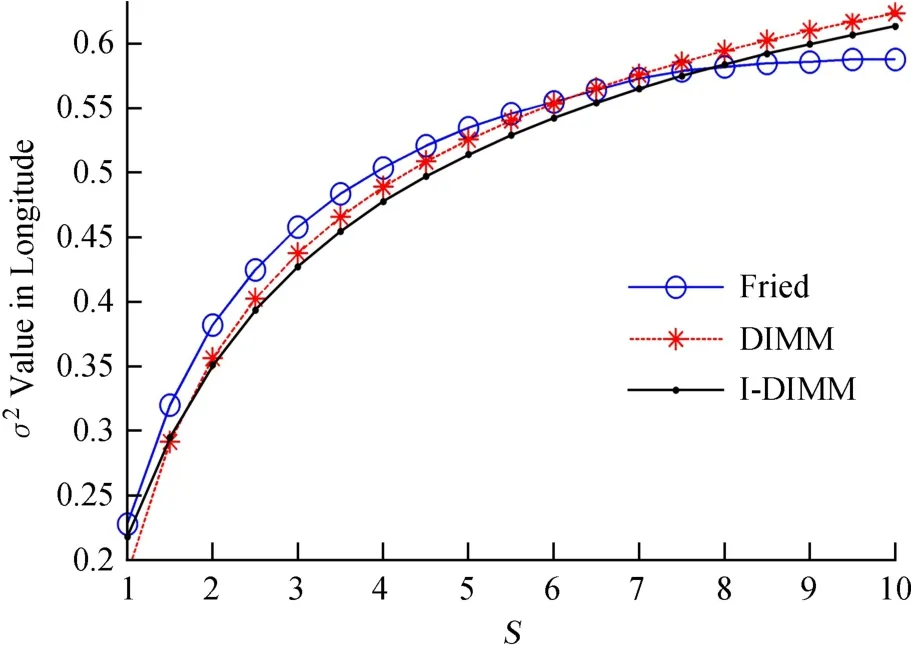
圖6 3種方法中T方向不同孔徑分離比的二維運動關系曲線Fig.6 Graphs of two-dimensional motion for various apertureto-separation ratios in transverse by three methods
圖5和圖6直觀地顯示,改進后的II-DIMM在L方向上均小于IDIMM。T方向上,當S<1.6時,II-DIMM略大于IDIMM;當S≥1.6時,II-DIMM均小于IDIMM。盡管IDIMM是文[1]針對歐洲南方天文臺DIMM圓形子孔徑的簡化公式,而II-DIMM是針對線性類方孔徑的簡化公式,但根據表2和表3的量化比較,在S≥1.5時,兩種簡化表達式相差僅僅在2%上下,孔徑形狀的不同不會對計算結果帶來明顯的誤差。
3 I-DIMM與DIMM對比模擬
3.1 子孔徑間距20 cm時I-DIMM與DIMM對比模擬
本文使用專業光學軟件YAO(Yorick Adaptive Optics,YAO是被廣泛公認的用以模擬不同大氣及星源條件下點擴散函數成像的軟件)。在Linux環境下運行YAO,設置望遠鏡口徑為36 cm,直徑方向上設置9個子孔徑,每個子孔徑直徑4 cm,設置與傳統DIMM相同的望遠鏡參數[1],這樣,I-DIMM在硬件上與DIMM完全相同,所以排除了兩種方法在計算r0值時因為硬件原因導致的差異與誤差,最終結果的差異完全因為計算公式的差異。在硬件上通過設置大氣湍流參數,初始化r0,設置值0.1 m(std=0.1),運行仿真軟件得到一系列光源的點擴散函數模擬圖像,仿真DIMM中差分像運動圖像的曝光捕捉。具體設置參數如表4。
每次模擬處理2 000幅點擴散函數圖像,共模擬100次。利用圖像質心算法求得每一個子孔徑上圖像質心在L(沿著子瞳中心連線)和T(垂直于子瞳中心連線)方向的坐標,結合差分像運動算法,求得在兩個方向上的大氣視寧度參數r0值,圖7和圖8分別給出了L和T兩個方向上,S=5時,100次模擬求得的r0值。
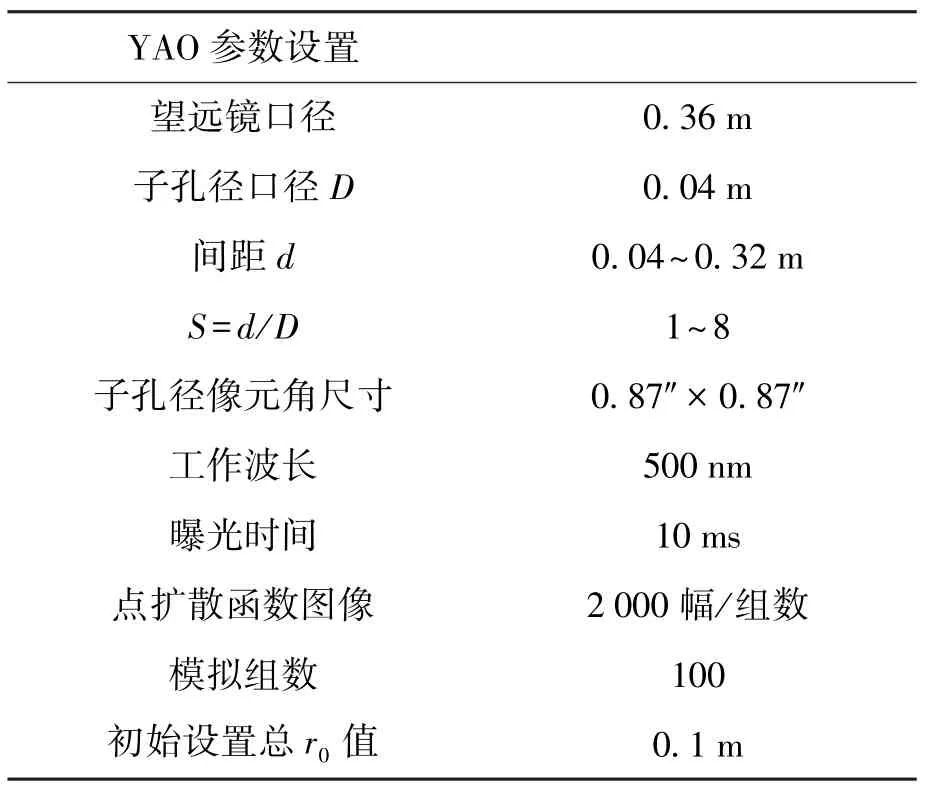
表4 YAO參數設置Table 4 Software YAO setup parameters
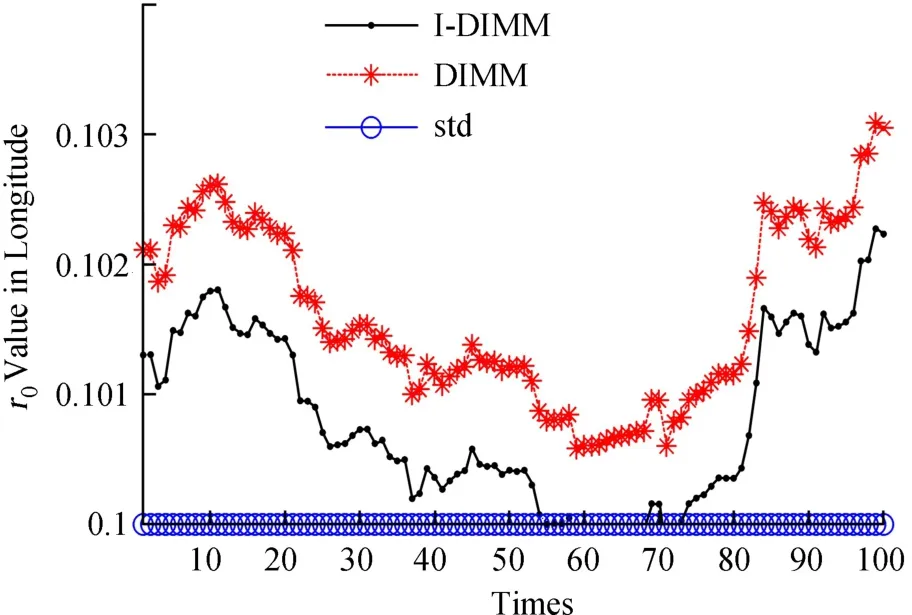
圖7 S=5時L方向100次模擬r0計算值Fig.7 S=5 results of r0 by 100 times simulating in Longitude
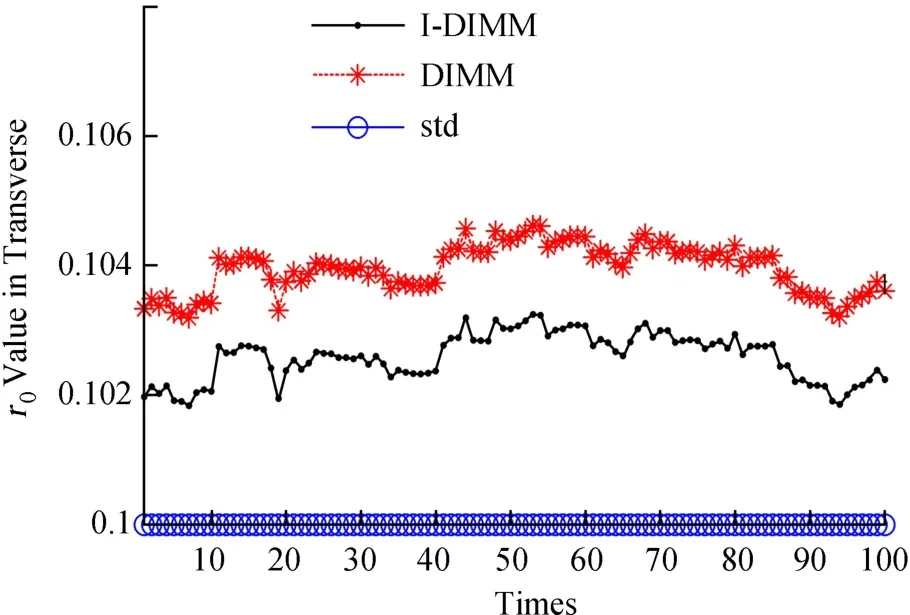
圖8 S=5時T方向100次模擬r0計算值Fig.8 S=5 results of r0 by 100 times simulating in Tranverse
如圖7和圖8,當子孔徑間距20 cm,即孔徑分離比S=5時,100次模擬中I-DIMM測量r0值均比DIMM更接近設置值0.1 m。L方向上,I-DIMM測量r0平均值為0.100 8 m,誤差0.8%,小于DIMM的誤差1.6%;T方向上,I-DIMM測量r0為0.102 6 m,誤差2.6%,小于DIMM的誤差4.0%。圖9給出了100次模擬總r0計算值。
I-DIMM測量總的r0平均值為0.101 7 m,誤差1.7%,小于DIMM的誤差2.8%。所以證明了IDIMM得到的r0值比傳統DIMM法得到的更加精確。
3.2 方形子孔徑誤差模擬
本文3.1節證明了改用I-DIMM計算公式,可以提高r0計算值的計算精度,但是,傳統DIMM采用的公式是在1990年提出的,由于當時計算能力有限,再加上主要應用于圓形子孔徑,與本文模擬時的方形孔徑有差別,必然導致一定的計算偏差。盡管在第2部分論證了與I-DIMM公式誤差僅僅在2%左右,完全可以忽略。但是,為了排除DIMM針對圓形子孔徑計算公式帶來的誤差,進一步驗證運用I-DIMM對計算精度的影響,對兩種方法中的r0計算均采用I-DIMM的計算公式。不同的是,模擬孔徑間距為20 cm的傳統DIMM計算時只處理孔徑1和6的像差分信息,而在模擬I-DIMM時,如圖4,I-DIMM系統的微透鏡陣列在直徑方向上最多可以提供4組孔徑間距為20 cm的像差分信息,所以為計算r0值提供了更多組數。以一次模擬2 000幅點擴散函數圖像計算r0為例,I-DIMM相當于處理8 000幅點擴散函數圖像,是DIMM處理像差分信息量的4倍。表5給出了對20次模擬,每次模擬2000幅圖像得到總r0平均值的結果。
如表5,I-DIMM計算總r0平均值為0.101 7,誤差為1.7%,比只處理一組信息的DIMM法計算誤差1.9%更加精確,所以,在處理相同數量圖像時,I-DIMM計算更多的子孔徑像偏移信息,計算值也比DIMM更精確。
3.3 子孔徑間距比S≤3時I-DIMM與DIMM對比模擬
根據文[1]的理論,使用DIMM時要求S≥2,而實際的望遠鏡未必一定滿足這一條件,比如,美國國家光學天文臺和歐洲南方天文臺的選址[3],也剛剛達到S=2,再比如,臺灣鹿林天文臺的選址[3],S=1.6。實際上,當S越小(S≤3),望遠鏡口徑也能隨之越小,更便于選址作業。為了評估S較小情況下I-DIMM測量r0值的精確程度,本文詳細分析了S較小(S≤3)時的情況。圖10與圖11分別給出了S較小時100次模擬r0計算平均值。

圖9 S=5時100次模擬總r0計算值Fig.9 S=5 results of total r0 by 100 times simulating
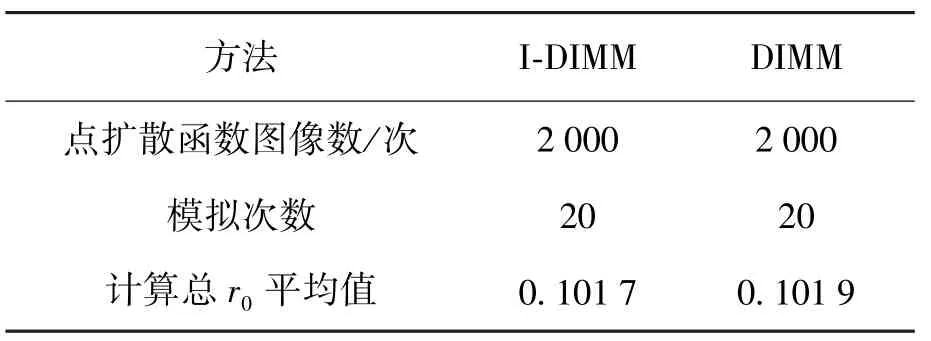
表5 總r0平均值Table 5 The average results of total r 0
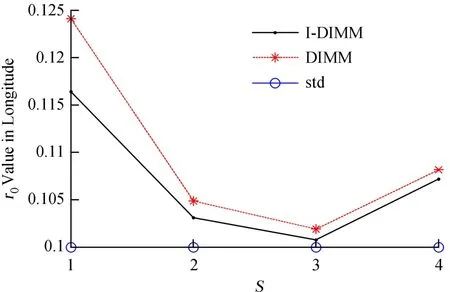
圖10 0.36 m望遠鏡L方向r0計算結果Fig.10 Results of r0 in longitude via 0.36m telescope
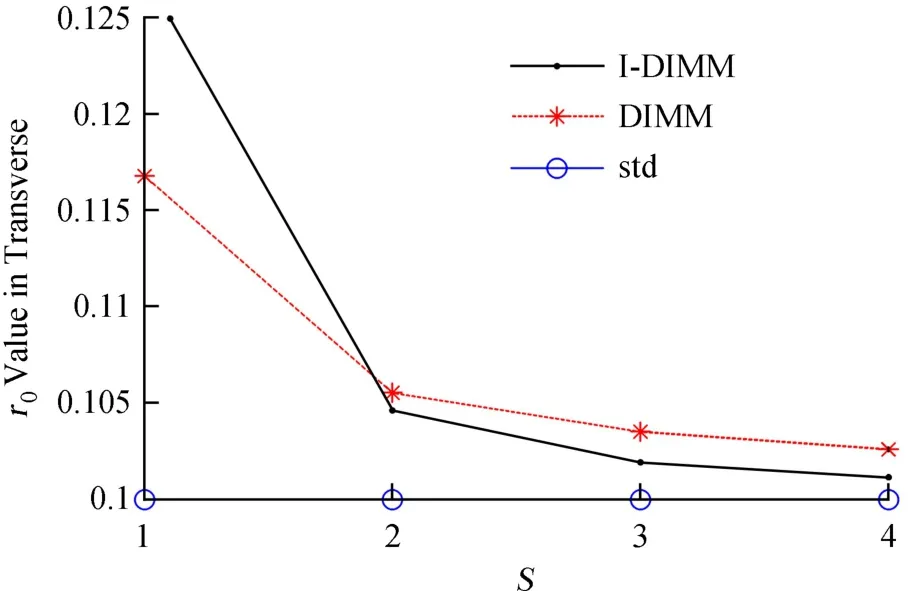
圖11 0.36 m望遠鏡T方向r0計算結果Fig.11 Results of r0 in transverse via 0.36m telescope
如圖10,在L方向上,I-DIMM法求得的r0值均小于DIMM法所求值,且距離r0設置值的基準線更近,說明I-DIMM法求得的r0值更精確。實際數值上,當S=1,2,3時,I-DIMM計算r0值分別為0.116 4 m,0.103 1 m和0.100 7 m,誤差分別為16.4%,3.1%和0.7%,均小于DIMM計算r0值誤差24.1%,4.9%和1.9%。在T方向上,當S=2,3時,I-DIMM法計算r0值為0.104 6 m和0.101 9 m,誤差4.6%和1.9%,均小于DIMM法誤差5.6%和3.5%,且I-DIMM曲線距離r0設置值的基準線更近,證明了I-DIMM法計算r0值在T方向同樣更為精確。由于r0與I(I-DIMM,DIMM)的單調性一致,當II-DIMM大于IDIMM時,I-DIMM的r0計算值也大于DIMM,如圖6,當S<1.6時,II-DIMM>IDIMM,所以當S=1時,I-DIMM法計算值大于DIMM法所求的r0值,偏離基準線也更遠。圖12給出的100次模擬總r0值的平均值,同樣印證了上述結論。
4 0.12 m口徑望遠鏡I-DIMM的模擬
在軟件YAO上,設置望遠鏡口徑為12 cm,子孔徑直徑4 cm,子孔徑間距8 cm,即S=2,初始r0設置值0.03 m(std=0.03),具體參數如表6。
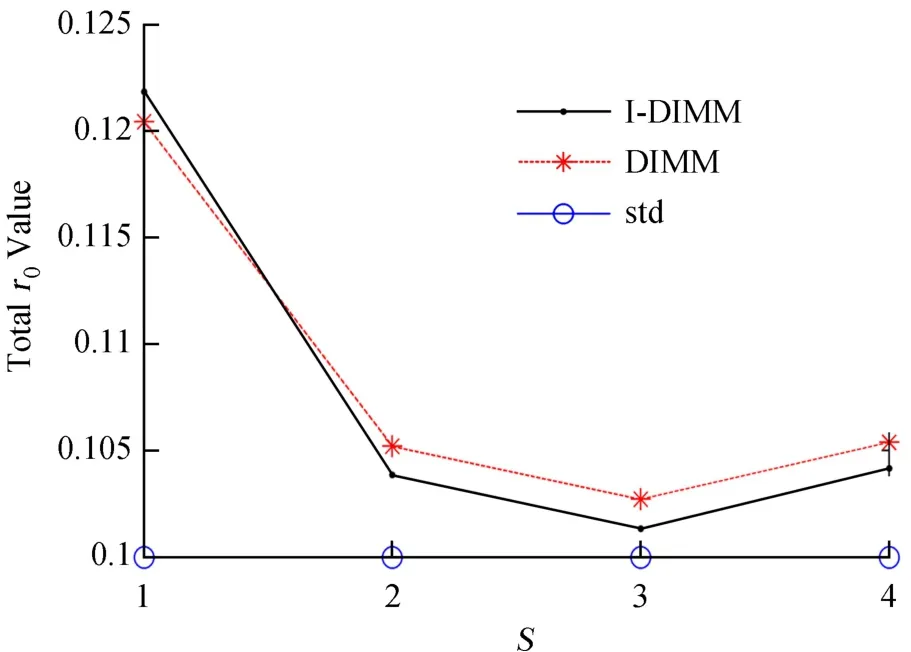
圖12 0.36 m望遠鏡總r0計算結果Fig.12 Results of Total r0 via 0.36m telescope
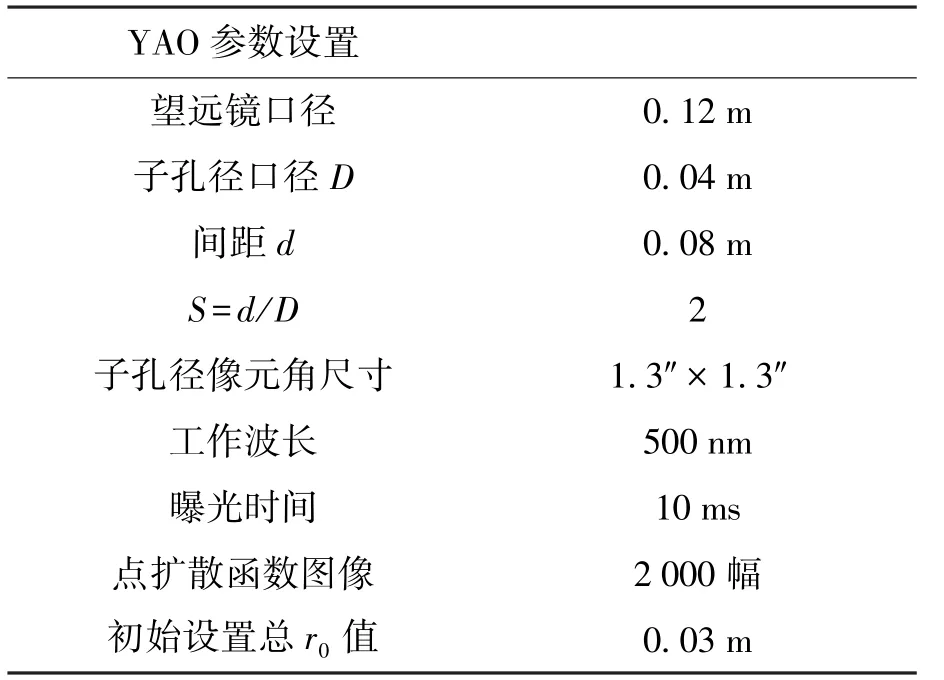
表6 YAO參數設置Table 6 Software YAO setup parameters
運用差分像運動法結合式,圖13給出了L和T兩個方向上20次模擬求得的r0計算平均值。
如圖13,當S=2時,無論在L方向或是T方向,本文所用I-DIMM法求得r0值都更接近r0設置值0.03 m的基準線,說明計算結果更精確。計算值分別為0.032 6 m和0.030 3 m,與設置值的誤差為8.6%和0.9%,低于DIMM法所得計算值誤差10.5%和1.8%。I-DIMM計算得總的r0值為0.031 4 m,誤差4.7%,小于DIMM的誤差值6.1%。這表明小口徑望遠鏡,子孔徑間距分離比S盡管很小,但I-DIMM法求得的總r0值比DIMM更精確。
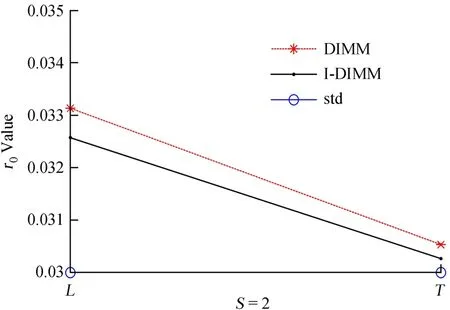
圖13 0.12 m望遠鏡r0計算結果Fig.13 Results of r0 via 0.12m telescope
5 結 語
本文介紹了差分像運動視寧度優化監測法(I-DIMM)在小口徑望遠鏡上,選取一定間距的兩個子孔徑組合即可計算得到大氣視寧度參數r0值。本文通過和傳統DIMM對比,在計算公式方面,不但證明了I-DIMM法應用的計算公式在孔徑間距為20 cm時計算r0值比DIMM的公式更精確,而且還證明了在孔徑間距很小的情況下I-DIMM得到的r0值同樣比DIMM更精確,尤其當孔徑分離比在1.6~3之間時,無論在沿子孔徑中心連線方向還是垂直于子孔徑中心連線方向,I-DIMM法計算得到的r0值都比DIMM精確,最大誤差在5%左右。在子孔徑組合方面,當星像圖像數量相同,孔徑間距固定時,I-DIMM處理一張圖像子孔徑信息的組合數大于或等于1,大多數情況下比DIMM處理一張圖像只能得到一組子孔徑星像偏移信息要多,從而進一步提高了r0計算精度。
本文又通過模擬0.12 m口徑望遠鏡,在孔徑分離比為2的視寧度測量情況,進一步驗證了IDIMM法計算r0值比DIMM更精確。這就為使用更小口徑望遠鏡提供了證據。同時,I-DIMM只需小口徑望遠鏡上的部分孔徑組合,即可求得精確的大氣視寧度參數r0,極大地簡化了儀器設備,更利于開放環境下便攜的大氣視寧度測量和選址作業。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
