聯網孤網情況下調速系統切換問題的研究
2019-01-22 08:21:24詹維勇劉興勝馬晨原彭金寧
水電站機電技術 2019年1期
關鍵詞:指令
詹維勇,劉興勝,翟 鵬,馬晨原,彭金寧
(1.華能果多水電有限公司,西藏 昌都854000;2.西安熱工研究院有限公司,陜西 西安710061)
果多水電站安裝4臺單機容量為40MW的混流式水輪發電機組,額定水頭51m,電站保證出力33.54MW,設計年發電量8.319億kW·h。電站單機容量約占昌都電網裝機容量17.3%,單機滿發時的電量(kW·h)約占全網最大日負荷容量(kW)的70%以上[1,2],是昌都電網的主力電源點。由于果多水電站單機容量占昌都電網容量比重大,機組的穩定運行對電網安全至關重要。昌都電網通過川藏聯網向華北電網送電,果多水電站是西藏清潔水電能源向東部輸送的重要工程。由于昌都電網存在與四川電網聯網運行和本地電網孤網運行兩種模式,果多電站水輪機調速器在負載運行時需要具備聯網和孤網兩種控制方式,本文著重研究水輪機調速器孤網/聯網方式在線穩定切換的問題[3-5]。
1 調速器功率調節的主要控制策略及其存在的問題
由于川藏聯網運行時昌都電網系統頻率波動小于0.05Hz,孤網運行時頻率波動超過0.5Hz。因此,果多水電站水輪機調速器負載運行存在聯網和孤網2種控制方式。這兩種控制方式是針對系統內特性發生重大變化時,為調速器負載運行設計的變結構、變參數控制方式。果多水電站聯網與孤網運行控制參數見表1,調速器控制原理框圖如圖1所示,其中虛線部分為調速器負載運行程序變結構變參數部分。
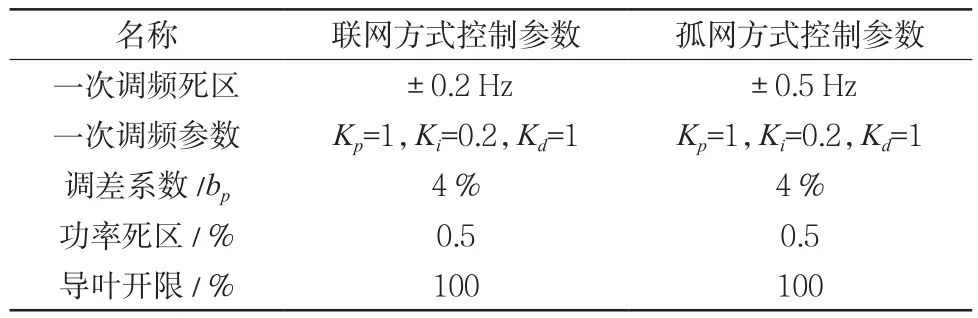
表1 聯網/孤網方式控制參數對比
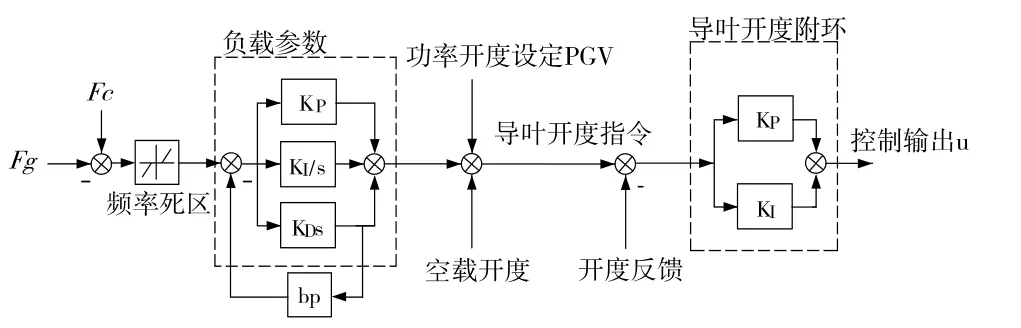
圖1 調速器原理框圖
1.1 聯網控制方式
聯網控制時調速器處于開度模式,由監控系統完成功率閉環計算。如圖1,調速器“負載參數”部分調用負載聯網參數計算一次調頻動作的導葉開度。在電網運行方式由孤網運行變化至聯網運行時,調速器可通過手動切換或自動切換進入聯網控制方式。當運行人員在監控上位機畫面選擇孤網轉聯網按鈕進行手動切換或系統頻率波動小于±0.3Hz時,延時30s調速器自動轉入聯網控制。
1.2 孤網控制方式
昌都電網孤網運行時系統頻率變化劇烈且頻繁,調速器在孤網方式時增加了一次調頻死區寬度。如圖1,調速器“負載參數”調用負載孤網參數計算一次調頻動作的導葉開度。因為調差系數不變則理論上的調頻增量不變,調速器設置了自動進入孤網控制的功能:當系統頻率波動大于±5Hz,延時1s后自動轉入孤網控制。
1.3 導葉開度指令計算
導葉開度指令計算:調速器將功率、頻率調節需求的功率量折算為導葉開度變化量,生成導葉附環的設定值,如圖1所示。導葉附環輸出導葉開度增量指令,調節器根據該指令直接調節導葉開度。導葉開度指令的計算公式如式1:

式1中:OPCMD導葉開度指令;PGV功率開度設定值;NLOP空載開度;PIDOUT負載參數PID輸出。
1.4 功率開度設定值計算和切換修正計算
調速器功率開度設定值計算回路接收并轉換監控系統下發的功率脈沖指令,計算出功率開度的設定值并調節導葉開度。調速器負載運行時,0.5s的監控功率指令脈寬對應導葉開度變化1%。若監控功率指令脈寬大于2s則調速器判指令為壞值且不執行。為實現導葉手/自動切換時平穩無擾,程序在功率開度設定值計算中設計了PGV的修正算法,如式2:

式2中:C開度修正值。
開度修正值按照計算永態轉差系數的方法,根據動態頻差實時計算開度修正值,算法如式3:

式3中:Bp永態轉差系數。
1.5 存在問題
(1)導葉由自動切為手動后,導葉開度指令不跟蹤導葉實際開度。
程序通過功率開度設定值中的修正值,計算當前頻率偏差對應的導葉開度,用修正值抵消一次調頻引起的導葉開度指令變化量,而不是令導葉開度指令跟蹤導葉實際開度。
(2)開度修正值在頻差動態變化中不能始終與負載參數PID輸出保持一致。
開度修正直接按照頻差和開度的關系一次計算完成,而負載參數PID輸出要經過負載參數計算,開度修正與負載參數PID通過不同路徑分別計算。因為后者是PID計算值,積分作用造成負載參數PID輸出在未達到穩態時始終滯后于開度修正計算值。由于昌都電網“大機小網”的特殊性,果多電站一次調頻負載參數中的積分系數Ki較小,造成積分時間較長,致使機組和電網在短時間內差值較大,該差值造成導葉切換瞬間的擾動。
(3)負載參數PID輸出未達到穩態時切換,導葉動作方向與一次調頻規律相反。
為實現調速器切換時無擾動,程序通過功率開度設定值計算對導葉開度指令進行修正。將式2代入式1:

式4中:OPCMD'導葉開度指令舊值。
由式4,當頻差進入穩態或頻差小于一次調頻死區時,負載參數PID輸出等于開度修正值,則切換時無擾動。若切換時頻率大于死區且負載參數PID輸出未達到頻差對應的穩態值時,由于開度修正值的絕對值大于負載參數PID輸出的絕對值,導葉動作方向與一次調頻動作規律相反,即頻差高時切換導葉開大,頻差低時切換導葉關小。同理,調速器在手動/自動切換,A/B套切換,開度/功率模式切換等容錯切換過程中均存在上述風險。
(4)孤網與聯網控制方式切換中的風險。
聯網控制方式的一次調頻死區小于孤網方式,且機組由孤網轉聯網可由運行人員無條件手動切換,故存在方式切換后導葉開度隨頻差同向動作的可能。由于該電站機組在電網中所占比重較大,機組功率變化對系統頻率影響明顯,調頻的反向動作可能快速惡化系統頻率。
1.6 調試中導葉在手/自動切換時的異常動作
果多電站機組在調試運行階段發現調速器在頻差大于一次調頻死區時進行手/自動切換導葉出現異常動作,造成機組對一次調頻出現反向調節,如圖2所示。
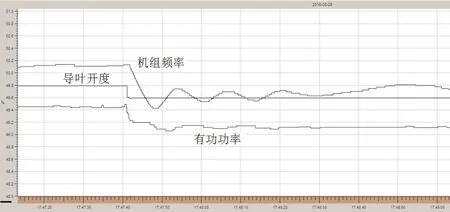
圖2 機組導葉在手/自動切換時的異常動作
由圖2可看出:
17:43:37:040 機組導葉在手動,退出全廠 AGC,機組頻率f=49.80Hz,導葉開度Y=43.82%;
17:45:58.592 機組孤網模式投入,機組頻率f=50.11Hz,導葉開度Y=43.78%;
17:47:39.747機組頻率f=50.12Hz,導葉切自動,導葉開度由Y=43.77%下降至37.68%;
17:51:44.770 導葉切手動,轉聯網模式,手動加負荷由14.5MW至18MW。
由于一次調頻死區設置為零,導葉動作幅度滿足一次調頻規律,但動作方向與一次調頻規律相反,且動作速率較正常速率要快。
2 控制難點及優化
圖2的異常現象造成系統頻率在約9s內下降了1.3Hz,果多電站特殊的機網關系決定了在該系統控制中應保證機組正常運行對電網的擾動較小。所以調速器程序必須實現手/自動無擾切換。為此提出了以下的解決方案。
2.1 方案一
為了解決原方案中修正計算值C和PIDOUT的輸出不能實時相等的問題,這里對開度修正值增加PIDOUT的修正項,則開度修正值變為式5:

式5中:PIDOUT項只在手/自動切換中消除負載參數PID的作用。
2.2 方案二
增加導葉開度指令跟蹤回路、頻率跟蹤回路和功率開度設定值跟蹤回路,優化后調速器原理框圖如圖3所示。
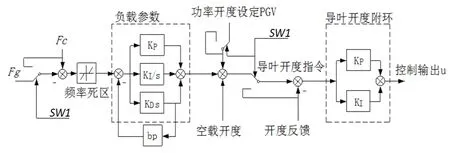
圖3 優化后的調速器原理框圖
調速器由自動切換為手動方式運行后,切換開關SW1保持使能動作狀態,直到切換回自動方式運行為止。導葉開度指令迅速跟蹤開度反饋。頻差計算暫停,負載參數PID輸出歸零。防止遠方指令影響功率開度,設定PGV處于自保持跟蹤狀態。
為實現調速器程序在大小網切換,A/B套切換,開度與功率模式切換時均滿足無擾要求,故在上述切換過程中令SW1使能5s。
3 優化后的效果
使用MATLAB仿真,對優化方案一和二的結果進行對比。
3.1 聯網運行手/自動切換的對比
模擬機組在聯網方式下運行,頻率偏差為-0.3Hz時,進行手/自動切換。圖4為導葉動作規律和機組功率變化的仿真過程。
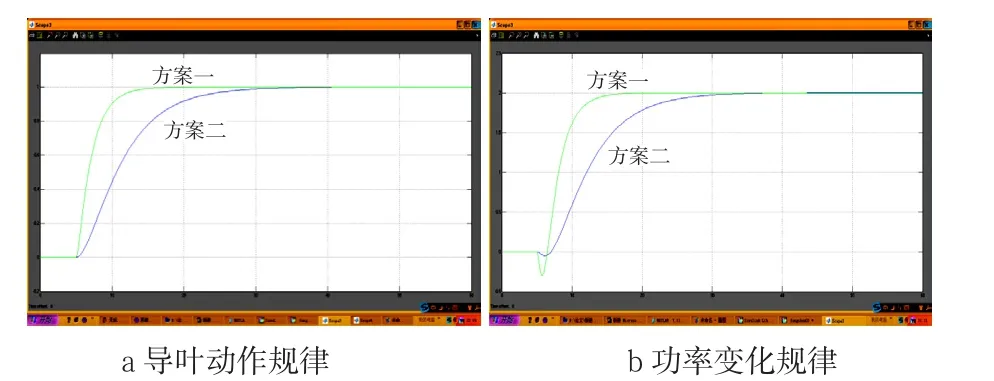
圖4 聯網方式下手自動切換
由圖4可以看出,兩種方案下機組響應頻率變化方向正確,穩態時都能達到理論計算的一次調頻的最大負荷調整幅度。但是二者的動態過程區別明顯:方案一,導葉動作速率明顯較快,大于一次調頻的正常動作速率,功率反調較明顯;方案二作用下機組響應一次調頻的速率正常。
這是由于方案一在修正時沒有考慮負載參數PID對切換結束后一次調頻的影響,導葉的動作速度僅受導葉開度副環和液壓系統速率限制,故其速率較正常一次調頻的速率要快。
3.2 大機小網系統方案對比
圖5、6是在電網負荷較小時對測試機組模擬系統頻率大于死區0.2Hz,機組導葉在兩種方案下的動作規律及對系統頻率和同網內其他機組的影響。
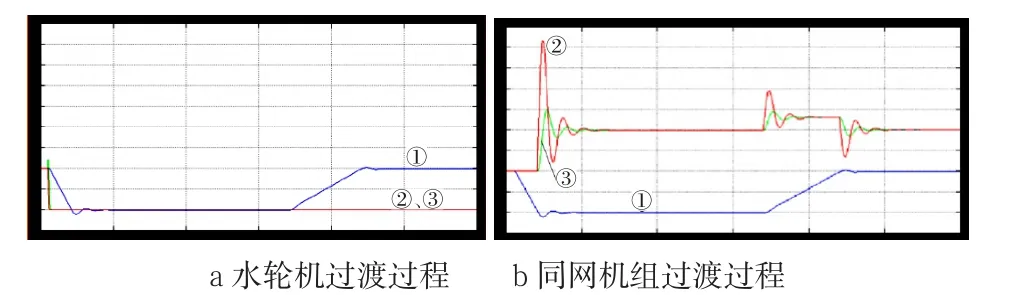
圖5 方案一在大機小網中的仿真
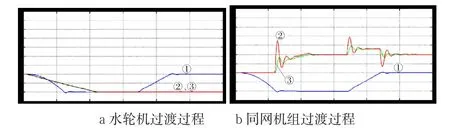
圖6 方案二在大機小網中的仿真
由圖5,6可以看出,被測試機組在電網中占比較大,其功率變化對系統頻率影響明顯。當導葉開始關閉,系統頻率隨被測試機組負荷減小迅速下降,同網機組在一次調頻作用下迅速增大機組出力,系統頻率在波動數次后逐漸穩定在較的低頻率位置,隨后在AGC作用下系統頻率逐漸上升,重新恢復到額定值附近。
圖5中由于導葉僅在導葉開度附環作用下關閉速度較快,系統頻率下降深度大于圖6。圖6中同網內機組一次調頻動作更加劇烈。一次調頻動作猛烈對同網內參與調頻機組的液壓系統造成較大壓力,若同網內調頻機組調速液壓系統失壓將造成同網內參與調頻機組跳閘,或引起事故擴大。
4 結論
本文基于水電站調速器導葉手/自動切換中的異常動作的問題,提出2種優化的控制方案,并通過仿真對比進行可行性分析。通過仿真測試,兩種方案均能解決機組導葉在手/自動切換時的異常動作問題,但調節效果略有差別。
通過分析得知:方案一的實現方法更為簡單,但存在應用于“大機小網”中由于負荷大幅度波動而影響鄰機一次調頻正常動作的風險。方案二通過更改調節模型結構,使機組在聯網、孤網轉換;功率模式、開度模式轉換;手/自動等模式切換過程中功能可正常實現,提高了機組模式切換的穩定性,對機組安全穩定運行提供了保障。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27