室內可見光通信高精度定位系統設計
2019-01-18 07:56:46許毅欽陳志濤古志良張志清陳俊芳
發光學報 2019年1期
許毅欽, 陳志濤, 袁 濤, 陳 昊, 古志良, 張志清, 張 強, 許 平, 陳俊芳*
(1. 華南師范大學 物理與電信工程學院, 廣東 廣州 510640;2. 廣東省半導體產業技術研究院, 廣東 廣州 510650; 3. 華南理工大學, 廣東 廣州 510650)
1 引 言
近年來,發光二極管由于其長壽命、高亮度和快響應的特性被廣泛用于區域照明、車燈和交通信號燈等相關產品。可見光通信技術(Visible light communication,VLC)是基于LED的新一代通信技術,通過控制LED的快速開關達到通信的目的。目前在國際上,由于VLC技術的高速、保密性好、無需占用無線電頻譜資源的特點而廣受關注[1]。作為一項新興技術,目前VLC在許多領域已有相關的應用報道,如水下通信[2]、超高速光組網[3-7]、室內定位[8-10]等。
在室內環境中,由于建筑物材料對電磁波的吸收及鋼結構的電磁波屏蔽效應,GPS等基于電磁波的定位系統會產生較大的定位誤差[11]。為此在室內定位領域,已有許多補充定位技術被提出,如射頻標簽(RFID)[12]、視覺定位技術[13]、Wi-Fi定位技術[14]等。已經有相關文獻報道這些室內定位技術的應用,然而上述的室內定位技術僅能實現1~5 m的室內定位精度。相比于戶外環境,室內定位往往需要更高的定位精度以實現位置信息相關的推送服務,因而上述的室內定位解決方案尚未完全滿足實際需要。
而基于可見光通信技術的室內定位系統由于無需借助電磁波通信,可實現室內高精度定位。目前國際上已有許多文獻報道了基于VLC的室內定位技術。若不考慮附加的精度控制技術,基于VLC的室內定位算法可分為接收信號強度(RSS)、到達時間差(TDOA)、到達接收角(AOA)、到達相位差(PDOA)[15-17]。在上述系統中TDOA與PDOA可實現較高的定位精度,但是系統需要時鐘同步處理,系統的復雜度較高,不利于系統集成。而AOA是基于角度的定位算法,需要特制的傳感器測量信號到達角。RSS通過測量信號強度來估計相對距離,無需額外的設計,然而由于信號強度的采樣值通常受到信道的多徑效應、系統噪聲影響,在上述的幾種定位算法中,RSS的定位精度最差。
由于基于RSS的室內可見光定位系統復雜度低、易于實現且成本很低,因而具有廣闊的應用前景。為了解決基于RSS算法的室內可見光通信定位系統精度不足的問題,本文提出一種基于人工神經網絡和迭代優化算法的RSS室內可見光通信定位系統的設計方案,包括硬件部分及算法。首先通過訓練人工神經網絡,使得網絡擬合室內的直射信道及漫射信道,消除由于多徑效應引起的信號強度采樣誤差。不同于信道的靜態參數,由于噪聲是隨機過程,無法采用學習的方式進行擬合,因此進一步通過優化算法降低由于噪聲等隨機過程引起的定位誤差。
2 可見光通信室內定位系統原理
2.1 信道模型
基于可見光通信技術的室內定位系統由安裝在天花板上的LED(CREE Q5 XPE 3 W)及接收機組成。模型中接收機包含一個光電二極管(PD)一級跨阻放大電路。由于LED的尺寸與實際光信號的傳輸距離相比較小,因此常將LED當作朗伯體進行分析。
如圖1,將LED的發射角定義為θ,LED與光電二極管之間的空間距離定義為d,直射光信號與光電二極管法線之間的夾角定義為φ。直射信道模型描述了發射機與接收機之間的光信號傳輸特性,其傳輸函數可以寫為:
H(0)LOS=
式中A為光電二極管的有效感光面積,Ts(φ)為光濾波器增益,G(φ)為聚光透鏡增益,mt、mr為朗伯常數。
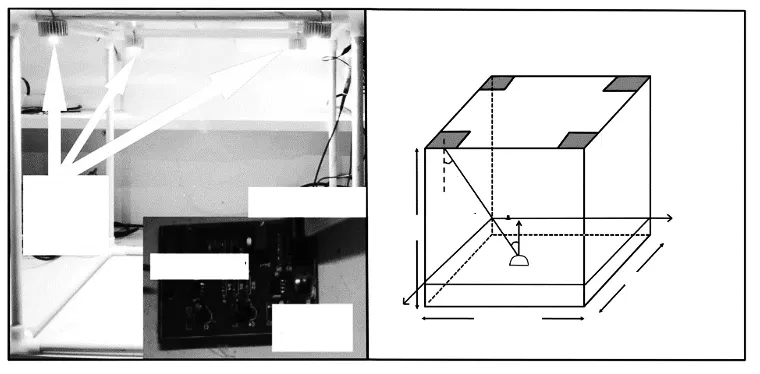
圖1 可見光通信室內定位系統模型圖
Fig.1 Model of positioning system for indoor visible light communication
通常室內的可見光通信不是理想的直射鏈路信道,由于墻壁、地面及室內其他具有反射特性物體對光信號的漫反射作用,會產生多徑效應。漫反射信道的傳輸函數可以寫為:

cosα·cosβ·cosmt(θ)·cosmr(φ), (2)
式中d1、d2分別為LED到反射點及反射點到接收機之間的距離,ρ是與反射體材料有關的系數,dSf為反射體的面積微元,α、β分別為反射光信號的入射角與出射角。
如果設接收機接收到光信號的功率為Pr,單個LED的輻射功率為Pt,則接收功率與輻射功率之間的關系可以表示為:
Pr=PtHLOS(0)+PtHREF(0)dSf.(3)
現有的一些基于RSS方法的室內可見光通信系統設計僅僅考慮了直射鏈路信道增益函數,并通過一些糾錯算法可實現的定位精度普遍在3~10 cm[18-20]。而漫射信道由于室內情況復雜,幾乎無法通過解析的方式計算其附加增益。同時實際接收到的信號功率還與系統噪聲因素相關,一般考慮電路系統及光路系統噪聲:(1)由光信號及背景光信號造成的散粒噪聲;(2)電路元件熱噪聲。這兩類噪聲均可視為加性高斯白噪聲:
在這些公式中,q、B、k、Ibg、Tk、G0、Γ、η、gm分別為元電荷電量、等效噪聲帶寬、波爾茲曼常數、背景光電流、絕對溫度、電路開環電壓增益、信道噪聲常數、光電二極管的固定電容量和跨導。
2.2 硬件系統原理
為了解決室內多參考點可見光通信帶來的碼間干擾問題,需要引入多址技術[21]。本系統使用碼分多址技術(CDMA)用于碼間干擾的消除,具體做法如下:
(1)每個LED獲得事先約定的二進制ID信息碼序列(代表所在的地理位置),該序列用于區分不同的LED信號源,第i個LED的二進制ID信息碼序列可以寫為:
Si={Si,1,Si,2,…,Si,N}.(6)
(2)產生OOK調制的ID信息碼基帶信號。
(3)直接擴頻調制,在本系統中利用Walsh碼作為擴頻碼,在一個具有n個信源的CDMA通信系統中需要用到長度為n的Walsh碼,Walsh碼可以由哈達瑪矩陣產生,一個具有2n個元素的哈達瑪矩陣可由迭代關系求出:
將具有2n個元素的哈達瑪矩陣按每行或每列取出,可獲得一組長度為n的Walsh序列:
Wi={Ci,1,Ci,2…,Ci,n},(8)
直接擴頻操作只需將每個ID信息碼元與該組Walsh序列相乘,第i個LED的ID信息碼擴頻后的信號為:
(4)擴頻后的信號經過LED驅動電路以光信號的形式發射,根據上述的室內無線光通信信道模型,并假設系統中所有的LED功率相同為Pt,接收機接收到的混疊光信號可以表示為:
根據Walsh碼的正交性質:
假想接收機需要恢復第iLED的信號的第j個碼元,只需要使用與擴頻操作相同的Walsh序列即第i個Walsh序列對r的第j個元素進行內積運算:
Oi,j=〈Wi·r〉j=
n為系統中LED的總數,為已知量,可見從混疊信號中恢復出了光強衰減信息與不同LED的ID信息。
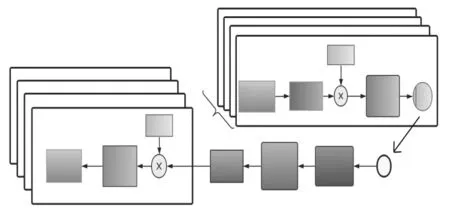
圖2 可見光通信室內定位系統的框架
2.3 定位算法原理
2.3.1 人工神經網絡空間距離預測算法
為了確定接收機在三維空間中的坐標(x,y,z),需要通過測量來自各個LED的信號強度從而估計接收機的空間坐標,如果先不考慮噪聲等隨機過程對定位結果的影響,設在接收端測得來自第i個LED參考點光信號衰減傳輸系數為H(i)(0),在理想的無噪聲條件下,最終的定位結果(x,y,z)是光信號衰減傳輸系數的H(i)(0)的非線性函數,包含了上述直射信道增益及漫反射信道增益。
目前大多數文獻僅僅考慮直射信道增益對接收信號的強度貢獻,這是因為在大多數情況下室內材料對光信號的吸收作用及接收機的視場角的有限性,由漫反射帶來的定位誤差通常可不計入考慮。然而在多反射材料(光滑的瓷磚,玻璃等)存在的室內環境,由于漫反射導致的定位誤差則會對基于RSS三角方法的可見光室內定位系統造成較大的定位影響。現不考慮信道參數的具體解析表達式,通過對神經網絡進行訓練,使之擬合實際信道環境。
為了擬合實際信道的傳輸函數,我們設計了一個3層的BP神經網絡,在本實驗中采用了4個LED實現三維定位,為此輸入層的輸入是一個長度為4的向量:
I={H(1)(0),…,H(4)(0)},(13)
D={d(1),…,d(4)},(14)
具體的訓練算法步驟如下:
(1)獲取訓練樣本(I(k),D(k)),其中k為樣本的標號,且I(k),D(k)∈R1×4。
(2)神經網絡權值隨機初始化。
(3)對于每一個訓練樣本,從前向后計算每個神經元的輸出,直到輸出層。并設第i個輸出層的輸出值為oi。
(4)對輸出層神經元計算輸出誤差:
δi=oi(1-oi)(di-oi).(15)
(5)對于隱藏層單元h,計算其誤差項:
δh=oh(1-oh)∑k∈outputlayerwkhδh,(16)
其中outputlayer表示輸出層點集合,wji表示結點i到j的連接權值。
(6)更新網絡權值,增量為:
Δwji=wji+ηδjxji.(17)
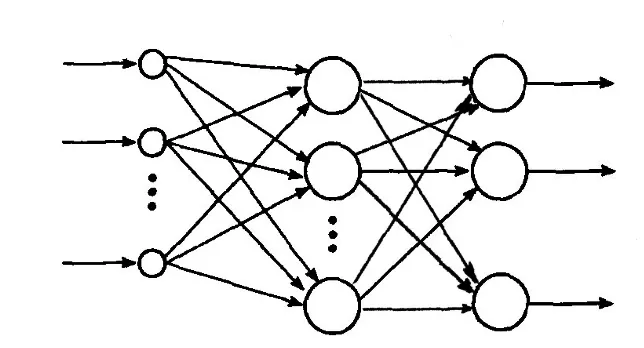
圖3 用于室內定位的人工神經網絡結構圖
Fig.3 Structure of artificial neural network for indoor location
2.3.2 三邊定位約束方程與誤差修復算法
在獲得了接收機到4個LED距離的估計值后,可通過下面的約束方程推算出接收機的定位估計坐標(xe,ye,ze):
其中H是接收機與LED所在平面的垂直距離,(xi,yi)是LED的平面坐標。需要指出的是盡管神經網絡能對整個室內非線性信道具有較好的擬合效果,但是無法處理諸如隨機過程,如噪聲因素帶來的定位誤差。為此提出一種基于Newton-Raphson迭代法的定位誤差修復算法。算法首先假設真實的估計距離為:
其中ε(i)是隨機變量且服從連續高斯分布:ε(i)~N(μ,σ2),μ,σ2→0。做出這一假設的前提是通信的信噪比足夠好,且噪聲的幅度分布較為集中。誤差修復算法的基本思想如下:由于噪聲因素導致神經網絡輸出偏移正常值,結果是定位坐標(xe,ye,ze)無法同時滿足方程組(16)的4個方程;從幾何關系來看,以各個LED為圓心,以估計距離為半徑的圓沒有相交于一點(如圖4)。
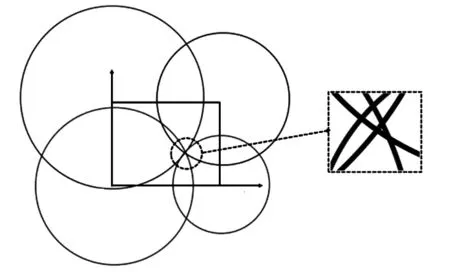
圖4 噪聲導致定位誤差的幾何描述
Fig.4 Geometric description of positioning error caused by noise
基于上述假設,約束方程可以重新寫為:
并設:
定義余函數為:
fi=(xe-xi)2+(ye-yi)2-(dxy,i±ε)2,(23)
余函數對xe、ye、ε的偏導數分別表示為:
定義第k次迭代后的余函數為:
第k次迭代與第k+1次迭代之間的關系可以由以下公式表示:
根據Newton方法的原理在第k+1次迭代時余函數應當設定為0,因此上述方程可以進一步寫為:
具體的誤差修復算法步驟如下:
(1)選擇迭代運算的初始點。
(2)根據式(23)~(25)計算余函數。
3 實驗與分析
3.1 實驗設計
如圖1所示,在普通實驗室環境搭建了室內定位實驗框架,其尺寸為1 m×1 m×1.2 m。接收機高度(以光電二極管的感光面高度為基準)為0.2 m,LED光功率的參考點在框架下方0.2 m處(考慮到散熱器及連接導線的高度)。在接收電路設計時,已經充分考慮OP電路的線性響應度(通過調整LED的光功率及跨阻放大倍數),電路的最終輸出波形如圖5所示,信號的采樣是基于STM32F407的10位ADC。具體的實驗步驟如下:
(1)從坐標(0 m,0 m,0.2 m)開始以0.1 m為步長將xy平面劃分為網格,以接收機在每個格點處的測量值作為樣本對神經網絡進行訓練,共100個樣本。
(2)從坐標(0.05 m,0.05 m,0.2 m)開始以0.1 m為步長將xy平面劃分為網格,進行二維定位測試。
(3)以0.1 m為步長將z軸分割各平面,范圍0.2~0.6 m,在每一個平面上按照(1)所述步驟
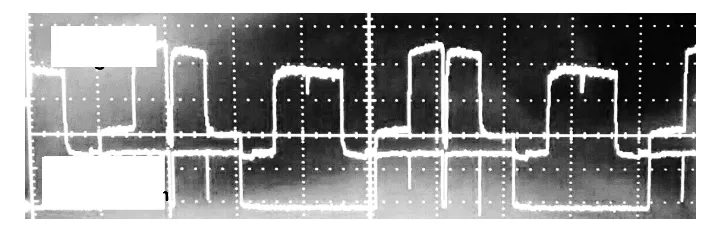
圖5 CDMA接收信號波形
繼續訓練神經網絡。
(4)在z軸0.25~0.55 m范圍內,以0.1 m為步長的各個平面上按照(2)所述步驟繼續訓練網絡,在0.3~0.5 m高度范圍內進行三維隨機路徑定位實驗。
3.2 實驗結果
3.2.1 神經網絡訓練
圖6是在一個高度平面上以100個采樣點為樣本的神經網絡訓練過程。在單次實驗中,遍歷整個訓練集56次后,最小均方誤差收斂到了預設值。單個高度平面點集的訓練時間為8 s。
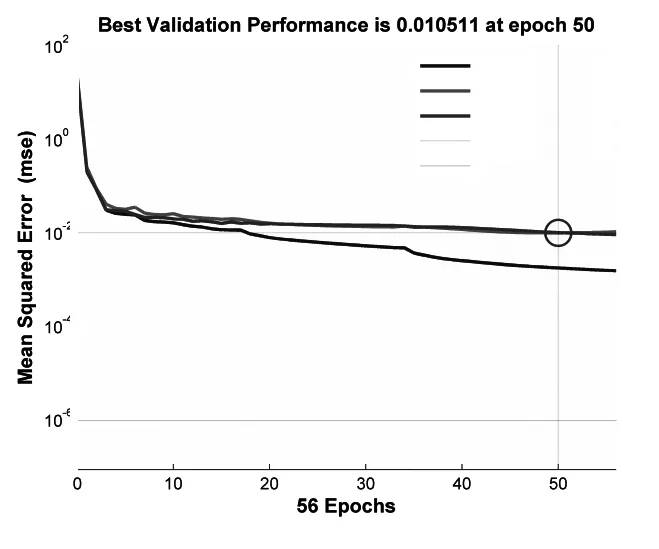
圖6 均方誤差下降曲線
3.2.2 二維定位實驗
圖7展示了二維定位的整體結果,黑色的三角形代表用于神經訓練的樣本數據,黑色的圓點代表用于測試的數據,白色的圓點代表人工網絡的定位預測結果,從結果來看無較大的偏離,具體的統計數據展示在圖9中。在100個測試點中,
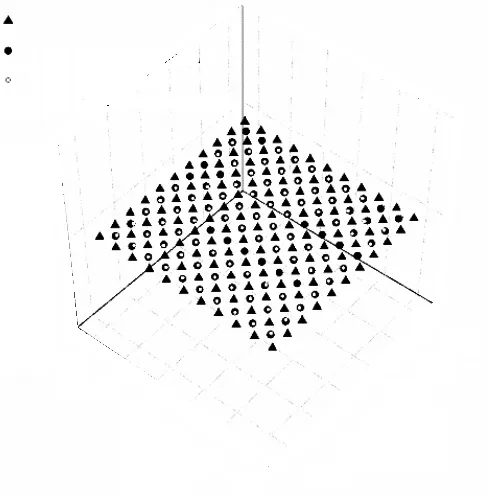
圖7 二維定位實驗結果
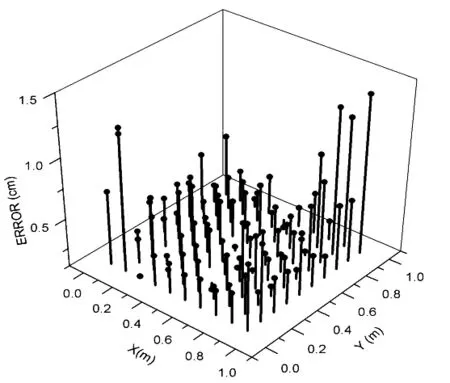
圖8 二維定位誤差分布
Fig.8 Two dimensional location error distribution
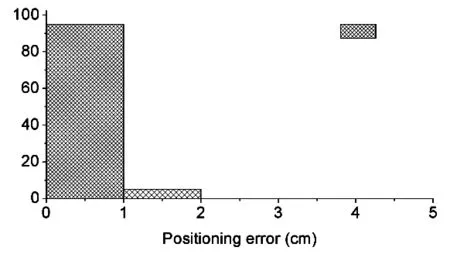
圖9 二維定位誤差直方圖
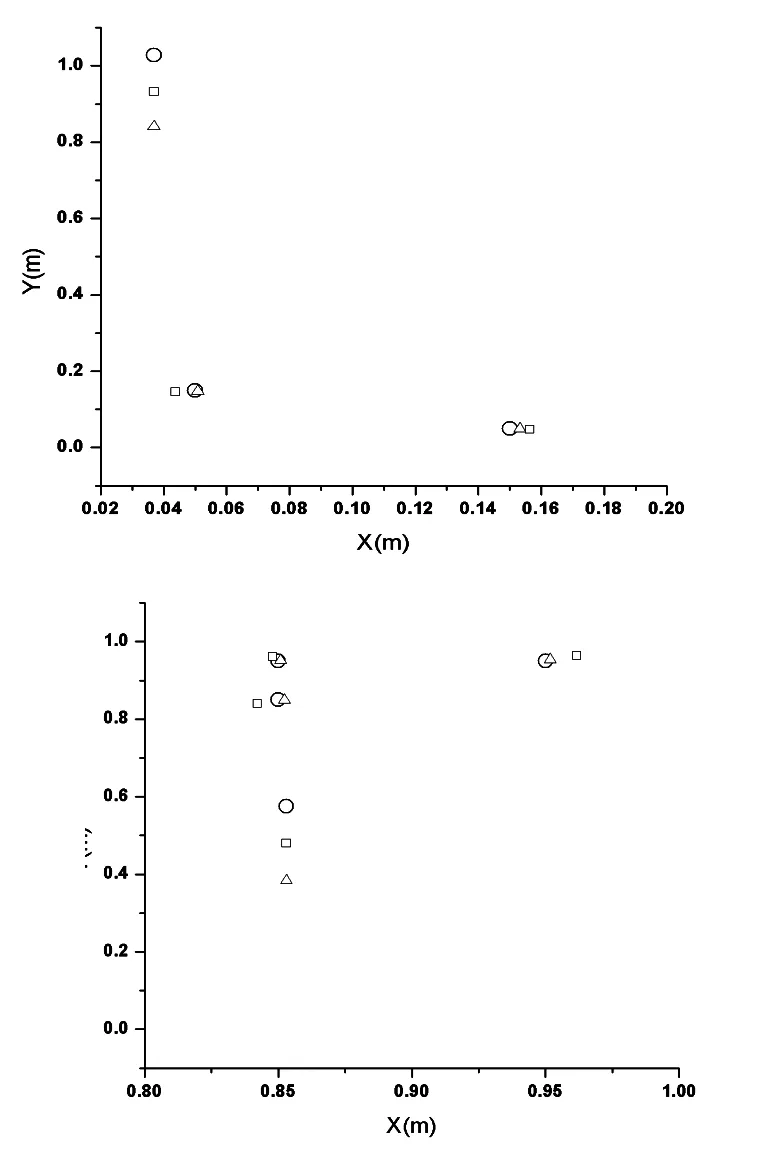
圖10 定位誤差修復算法效果圖
95%的測試點實現了1 cm以內的定位誤差,其余的測試點均實現了2 cm以內的定位誤差;系統的二維定位平均定位誤差為0.87 cm。具體的二維定位誤差分布在圖8中展示,可以清晰地看出,在模型的邊緣處定位誤差較大,這是由于在模型邊緣處,光信號的幅度受到漫反射物體的影響較大,對人工神經網絡的非線性擬合能力要求更大;另一種可能的解釋是在模型的邊緣區域,來自遠離該區域的LED光信號較弱,受到的噪聲影響更大。為此可通過增加隱藏層的節點數目或者上述的誤差修復算法對邊緣區域的誤差進行進一步消除。
對誤差超過1 cm的5個測試點采用誤差修復算法進一步逼近后,定位誤差的修復效果如圖10所示。
3.2.3 三維定位實驗
在完成了神經網絡高度信息訓練后,使用三維路徑測試實驗對系統的三維定位效果進行測試,測試的高度范圍為0.3~0.5 m,以0.1 m為高度分辨率,共3個高度平面,每個高度平面上通過隨機抽樣的方式選定5個測試點,并且根據抽樣的順序依次連接形成一條隨機測試路徑,具體的實驗結果如圖11所示。
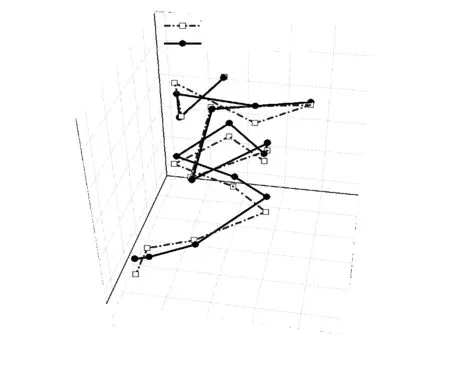
圖11 隨機路徑實驗
圖12所示的三維定位誤差分布直方圖,在參與測試的15個測試點中,4個點實現了1 cm內的定位精度,14個點實現了3 cm內的定位精度,隨機路徑實驗的平均定位誤差僅為1.47 cm。
如果對所有的測試點采用誤差修復算法進一步逼近,得到圖13的三維隨機路徑定位結果。
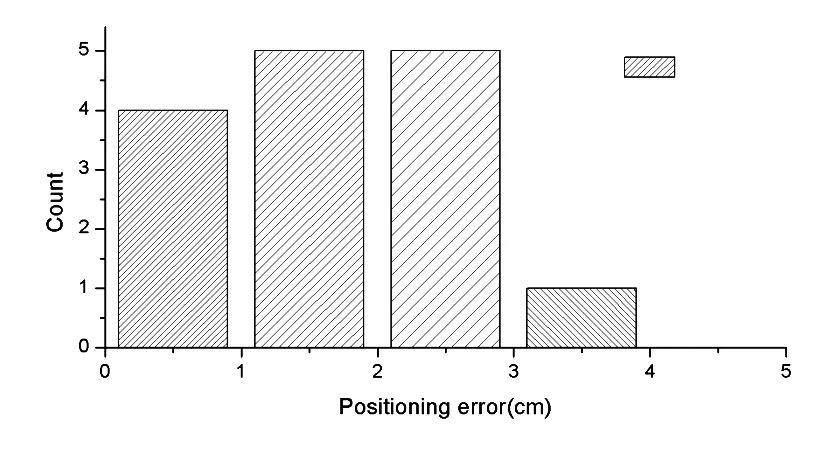
圖12 三維定位誤差分布直方圖
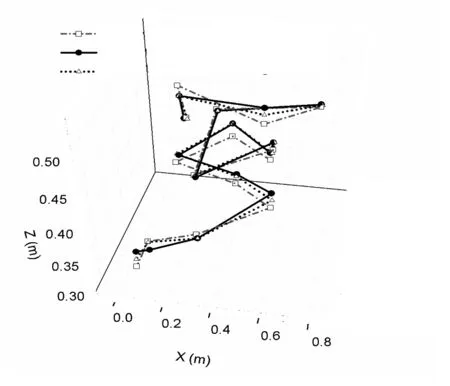
圖13 隨機路徑實驗:使用誤差修復算法。
Fig.13 Random path experiment: use error repair algorithm.
圖14是定位誤差修復后的誤差分布直方圖,可以直觀地看出,使用誤差修復算法后整體的定位誤差可控制在2 cm內。
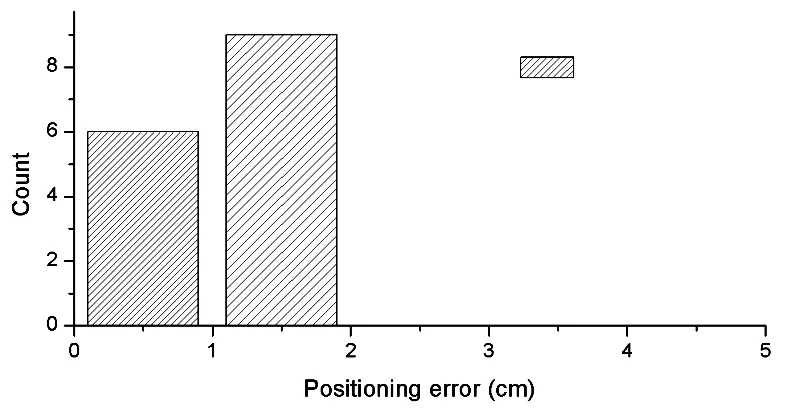
圖14 使用誤差修復算法后的隨機路徑定位誤差
Fig.14 Random path positioning error after using error repair algorithm
4 結 論
本文提出了一種基于接收信號強度的室內可見光通信定位系統,包括硬件設計及算法設計。在硬件設計上充分考慮了真實應用場景,采用CDMA技術解決參考點通信干擾問題,由于室內漫反射信道的解析表達式復雜,故采用神經網絡學習的方式擬合室內的真實信道參數;而針對隨機過程帶來的定位誤差,提出一種定位解迭代逼近算法,進一步減小定位誤差。實驗結果表明:未使用逼近算法的前提下,本系統在用于二維定位時,99%以上的測試點實現了1 cm以內的定位誤差,平均定位誤差僅為0.87 cm;本系統在用于三維定位時93%的測試點實現了3 cm以內的定位誤差,平均定位誤差為1.47 cm;而使用逼近算法后,二維定位測試點的誤差可控制在1 cm內,三維定位測試點的誤差可控制在2 cm內。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00