近地衛星嚴格回歸軌道保持控制
2019-01-18 11:52:24杜耀珂楊盛慶完備王文妍陳筠力
航空學報 2018年12期
關鍵詞:影響
杜耀珂,楊盛慶,完備,王文妍,陳筠力
1. 上海航天控制技術研究所,上海 201109 2. 上海市空間智能自主控制技術重點實驗室,上海 201109 3. 上海航天技術研究院,上海 201109
近地衛星的軌道保持控制的目的是修正空間攝動力對衛星軌道參數的長期累積影響,使衛星保持在所需的目標軌道附近。常規的近地軌道控制任務主要包括:衛星太陽同步軌道的地面軌跡維持控制、大氣阻力對衛星高度造成的衰減修正控制等。保持控制要求的精度較低,控制的時間間隔一般在幾個月甚至更長的時間。因此,主要采用軌道參數超調的控制策略[1-2]。由于受到測量精度限制,以及保持控制殘差在幾個月甚至是幾年的長時間累積影響,往往會造成衛星實際的運動軌跡與期望的目標軌道存在較大偏差。一般近地衛星的軌道保持控制對回歸的精度要求并不太高,存在幾千米到幾十千米的星下點軌跡偏差,并不影響到衛星的飛行任務。
隨著衛星載荷對衛星軌道精度要求的提高,以往的軌道設計和保持控制已經不能滿足高精度對地觀測衛星的使用需求。例如對于長期地球形變或者地質災害監測的重軌測量任務,就需要在整個壽命期間將衛星軌道控制在一條預先設定的嚴格回歸軌道附近運動,偏差最大約為幾百米,這樣的軌道控制就稱為嚴格回歸軌道控制[3-4]。文獻[5-8]給出了嚴格回歸軌道的定義及設計方法:在獲取了嚴格回歸軌道起始點參數之后,以地球引力場模型為基礎進行高精度軌道遞推,就能夠獲取目標參考軌跡。文獻[9-11]描述了美國國家航空航天局(NASA)的LightSAR衛星和日本的ALOS-2在自主高精度回歸軌道保持控制方面的工作,結果能夠有效提升近地衛星軌道保持的精度。
本文在綜合了參考文獻研究的基礎上,將衛星編隊的運動學理論[12-13]引入嚴格回歸軌道的分析和控制過程,提出了虛擬編隊構形的概念。在此基礎上,分析實際衛星相對于空間參考軌跡的偏差情況,并采取最優的長期軌道保持控制策略。本文從衛星相對于參考軌跡的相對運動關系和軌道參數長期累積變化兩個方面進行分析和仿真。一方面相對運動關系反映了實際衛星偏離空間參考軌跡的偏差狀況,能夠確定衛星是否在軌道管道內,為星上是否需要進行自主保持控制提供依據;而另一方面,累積的空間攝動影響通過虛擬編隊構形參數變化分析出來,可以轉換為精確的衛星軌道平根數偏差,從而計算出嚴格回歸軌道保持控制的控制量。
1 嚴格回歸軌道保持控制需求
嚴格回歸軌道是針對近年來的衛星重軌對地觀測任務提出的一種具有新特點的衛星運行參考軌道。嚴格回歸軌道在設計上的特點是始末狀態的閉合性。經過迭代設計得到的嚴格回歸軌道在空間的運行軌跡如圖1中曲線所示。該軌跡是在地固坐標系下一組完全確定的參考點的集合。嚴格回歸軌道的保持控制的目標是衛星始終運行在以參考軌跡為中心,管道半徑為rt的管道內,如圖2所示,因此也可以將嚴格回歸軌道的保持控制稱為“管道保持控制”。

圖1 衛星嚴格回歸參考軌道設計結果Fig.1 Design results of satellite strictly-regressive orbit

圖2 管道保持控制需求Fig.2 Requirement of tube maintenance control
1.1 定義與實現
衛星嚴格回歸軌道是指在僅考慮地球重力場模型情況下,在一個回歸周期的時間段內,地固坐標系下空間軌跡的初始點和末端點的位置和速度“完全”相同。
在上述定義中,地球重力場模型一般是基于特定的重力場模型文件,如:EGM2008。“完全”相同,是指初末狀態的偏差限定在一個很小的范圍內(通常位置誤差小于1 m)。根據以上條件,通過迭代計算,就可以得到一組WGS84坐標系下時間、位置和速度的序列,該序列就稱為空間參考軌跡。在給定的時刻點情況下,對于參考軌跡中的一組位置和速度參數,經過坐標變換能夠得到嚴格回歸軌道的軌道參數。
1.2 高階軌道動力學與模擬
為了能夠盡量真實地模擬地球重力場對衛星軌道的影響,應采用地球引力場位函數的表示方法,便于將地球重力場文件進行衛星軌道積分。在地固系中,一個質點所承受的地球引力加速度為
(1)
式中:R=R(X,Y,Z)為質點的地心位置矢量,R為R的矢量模值;V(R)為地球引力場位函數;μ為地球引力常數。
參考文獻[14],可以得到如下以勒讓德多項式的表示形式
(2)

嚴格回歸參考軌道設計過程僅考慮地球重力場影響,而衛星實際軌道不僅受地球重力場影響,還包括大氣阻力、日月三體引力、太陽光壓、固體潮、相對論效應等,因此需要將上述攝動力進行建模,并仿真得到對應時刻J2000坐標系下的加速度,從而引入仿真模型。具體過程可以參考文獻[15-16]。
1.3 虛擬衛星編隊及其坐標系定義
本文的研究和分析過程采用的坐標系為OIRITINI和OERETENE,其坐標系定義如圖3所示,其中ωe為地球自轉角速度,v為參考衛星的飛行速度。兩種坐標的差異主要是地球自轉對坐標系原點參數影響和衛星飛行方向在兩個坐標系投影的不同。OERETENE坐標系用于分析相對參考軌跡的狀態,OIRITINI坐標系用于分析衛星相對軌道根數的變化。
圖中:取參考軌跡點對應的慣性系位置坐標為原點OI,OIRI為從地心指向OI,OINI指向軌道面法線方向,OITI根據右手法則確定。該坐標系原點為嚴格回歸軌道的參考點,并非衛星的真實坐標,結合文獻[12]中編隊坐標系的定義,稱該坐標系為“虛擬編隊坐標系”。
OERETENE為基于地固系坐標的直角坐標系,稱為“軌跡坐標系”。取參考軌跡點對應的地固系位置坐標為原點OE,OERE為從地心指向OE,OETE垂直于OERE指向后續的參考軌跡點,OENE根據右手法則確定。
由慣性系到虛擬編隊坐標系的轉換關系為
(3)
式中:rI、vI分別為慣性系位置和速度矢量。

圖3 OIRITINI與OERETENE的坐標系定義Fig.3 Definition of OIRITINI and OERETENE coordination
由地固系到軌跡坐標系的轉換關系為
(4)
式中:rE和vE分別為地固系位置和速度矢量。
衛星的嚴格回歸軌道控制是指對于給定的參考軌跡上的任意一個檢驗點k,其空間誤差Ek定義為:參考軌跡的檢驗點k到真實軌跡上一點Pa的矢量在檢驗點k的OT向(切向)分量為零,檢驗點k到真實軌跡上一點Pa的距離定義為Ek。若對于參考軌跡上的所有Ek均小于一個正常數Rt,則稱真實軌跡位于參考軌跡附近半徑為Rt的管道內。以上即是衛星嚴格回歸軌道保持控制的基本任務,稱為“管道保持控制”。
2 衛星軌道偏離參考軌跡分析
基于上述嚴格回歸軌道和坐標系定義,取軌道參數初值如表1所示。其中參考軌道和衛星軌道初值均采用表中所示參數,但在軌道積分模型中,空間參考軌跡僅采用70階地球重力場模型文件,而真實衛星除相同的地球重力場模型文件之外,還加入了其他空間攝動力模型。
軌道參數用衛星相對于參考軌跡點的軌道參數差表示,選取軌道半長軸偏差Δa,升交點赤經差ΔΩ,軌道傾角差Δi和緯度輻角差Δu來表示,為了便于比較,將ΔΩ、Δi和Δu與軌道半長軸a相乘, 轉換為長度單位進行表示。通過衛星軌道在OIRITINI和OERETENE坐標系內的投影,確定衛星相對于參考軌跡的累積狀態,以確定是否超出以參考軌道為中心的“管徑”范圍。

表1 初始軌道平根數[17]Table 1 Mean elements of initial orbit [17]
2.1 大氣阻力影響
使用太陽活動高年的參數,衛星面質比取為0.01,經過仿真,大氣阻力引起衛星軌道半長軸每天衰減約15 m,仿真時間長度t為3天。經仿真,在此期間,Δa的變化很明顯,衛星緯度輻角u的累積變化a·Δu將達到約10 km,a·ΔΩ和a·Δi變化很小。以上衛星軌道參數的變化轉換到軌跡坐標系下,相對于參考軌道中心的偏差達到約600 m。Δa的模值越大,Δu累積越快,隨著時間的累積,造成的管徑偏差還將迅速增加。衛星軌道受大氣阻力影響偏離參考軌道的情況如圖4 所示,對應偏離嚴格回歸軌道在OIRINI平面的投影如圖5(a)所示,在此坐標系下可以顯示衛星虛擬編隊構形參數變化。在OERENE平面的投影如圖5(b)所示,在此坐標系下可以顯示相對于空間參考軌跡的管道半徑偏差,簡稱管徑偏差。
2.2 日月引力攝動影響
日月引力為保守力,量級較小,經過模擬衛星1年的運行情況,ΔΩ、Δi存在一定的周期性波動,且a·ΔΩ的波動范圍達到了約2 800 m,a·Δi的波動既包含了約14天為周期的短期波動項,也包括了以約半年為周期的長期波動項,波動范圍到達了約300 m。但半長軸無持續衰減情況,僅在小范圍內波動,因此緯度輻角的累積變化Δu較小。相對于空間參考軌道中心的偏差達到約2 300 m。衛星軌道受日月攝動影響偏離參考軌道的情況如圖6所示,對應的在OIRINI平面的投影如圖7(a)所示,在OERENE平面的投影如圖7(b)所示。


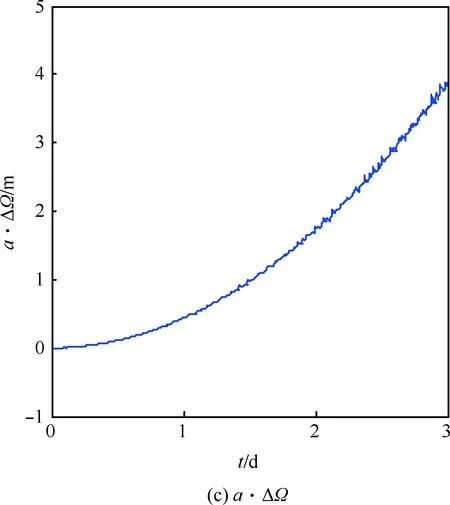

圖4 衛星受大氣阻力影響偏離參考軌道的情況Fig.4 Deviation of satellite’s orbit to reference orbit due to atmospheric drag


圖5 衛星軌跡受大氣阻力影響下在OIRINI與OERENE平面的投影(3天)Fig.5 Projection of satellite’s track in OIRINI plane and OERENE plane due to atmospheric drag (3 days)




圖6 衛星受日月攝動影響偏離參考軌道的情況Fig.6 Deviation of satellite’s orbit relative to reference orbit due to sun and moon’s perturbation


圖7 衛星軌跡在受日月攝動影響在OIRINI與OERENE平面上的投影(365天)Fig.7 Projection of satellite’s orbit in OIRINI plane and OERENE plane due to sun and moon’s perturbation (365 days)
2.3 太陽光壓、固體潮、相對論效應等攝動影響
太陽光壓、固體潮和相對論效應等空間攝動雖然包含了太陽光壓這種非保守力的長期影響,但由于攝動的量級總體較小。ΔΩ、Δi存在一定的周期性波動,且a·ΔΩ的波動范圍達到了約500 m,a·Δi的波動既包含了約14天為周期短期的波動項,也包括了以約半年為周期的長期波動項,波動范圍到達了約50 m。半長軸僅在小范圍內波動,量級為米級,從模擬衛星運行1年的結果來看,衛星偏離嚴格回歸軌道中心較小,最大約為750 m。衛星軌道受太陽光壓、固體潮和相對論效應攝動影響的變化如圖8所示,對應的在OIRINI平面的投影如圖9(a)所示,在OERENE平面的投影如圖9(b)所示。
2.4 攝動影響小結
將本節攝動仿真結果梳理如表2所示。
3 管道保持控制設計
3.1 管道偏差來源分析
衛星偏離嚴格回歸軌道中心的管徑偏差包括法向(OENE)分量EN和徑向(OERE)分量ER兩個部分。EN的影響因素是衛星軌道與嚴格回歸軌道半長軸偏差Δa引起的累積影響,即隨著時間累積Δu偏差逐漸增加,隨著地球自轉,該偏差會轉移到軌跡坐標系的法線方向。根據衛星軌道運動學,EN與Δu的關系可以表示為
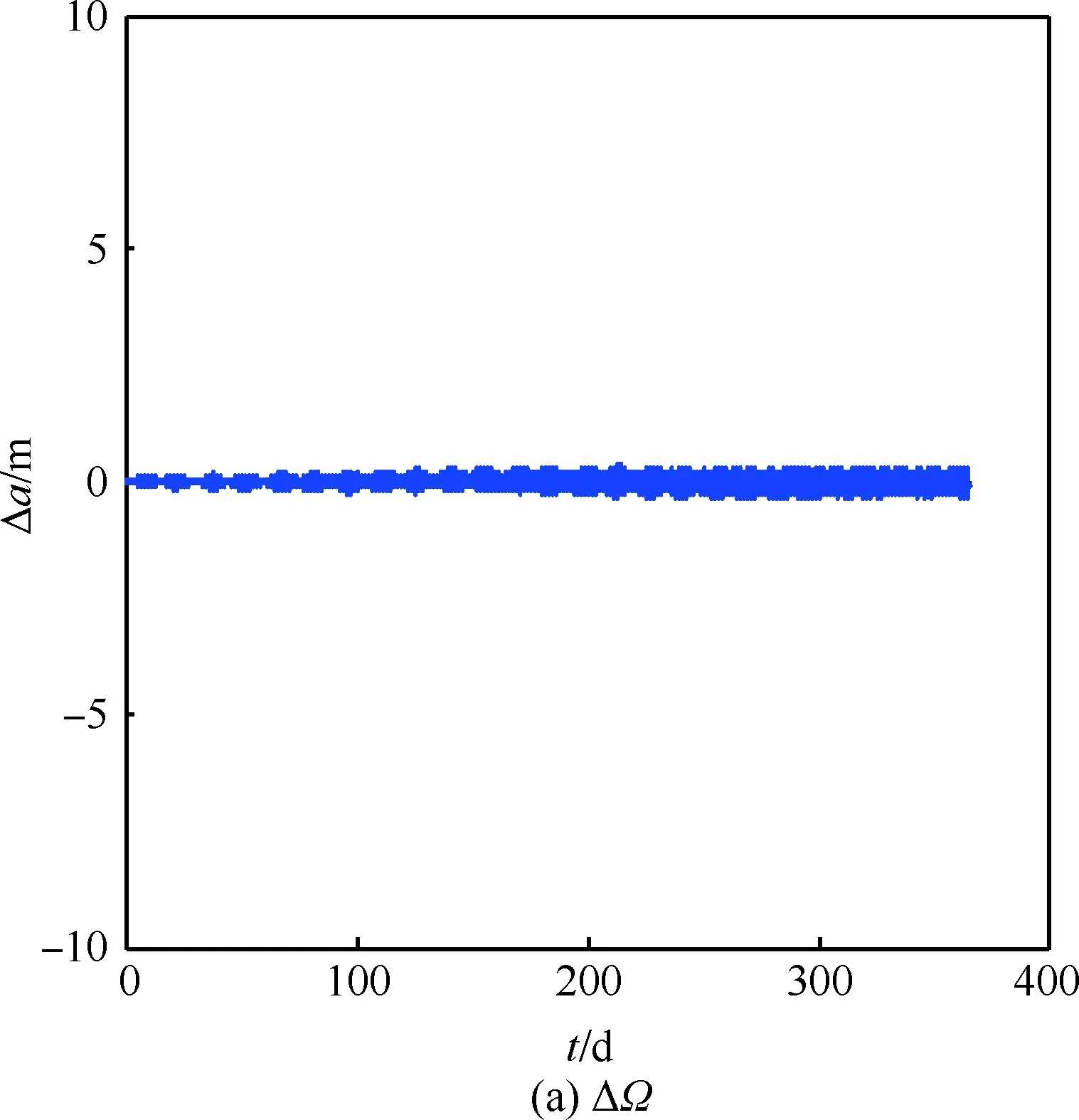


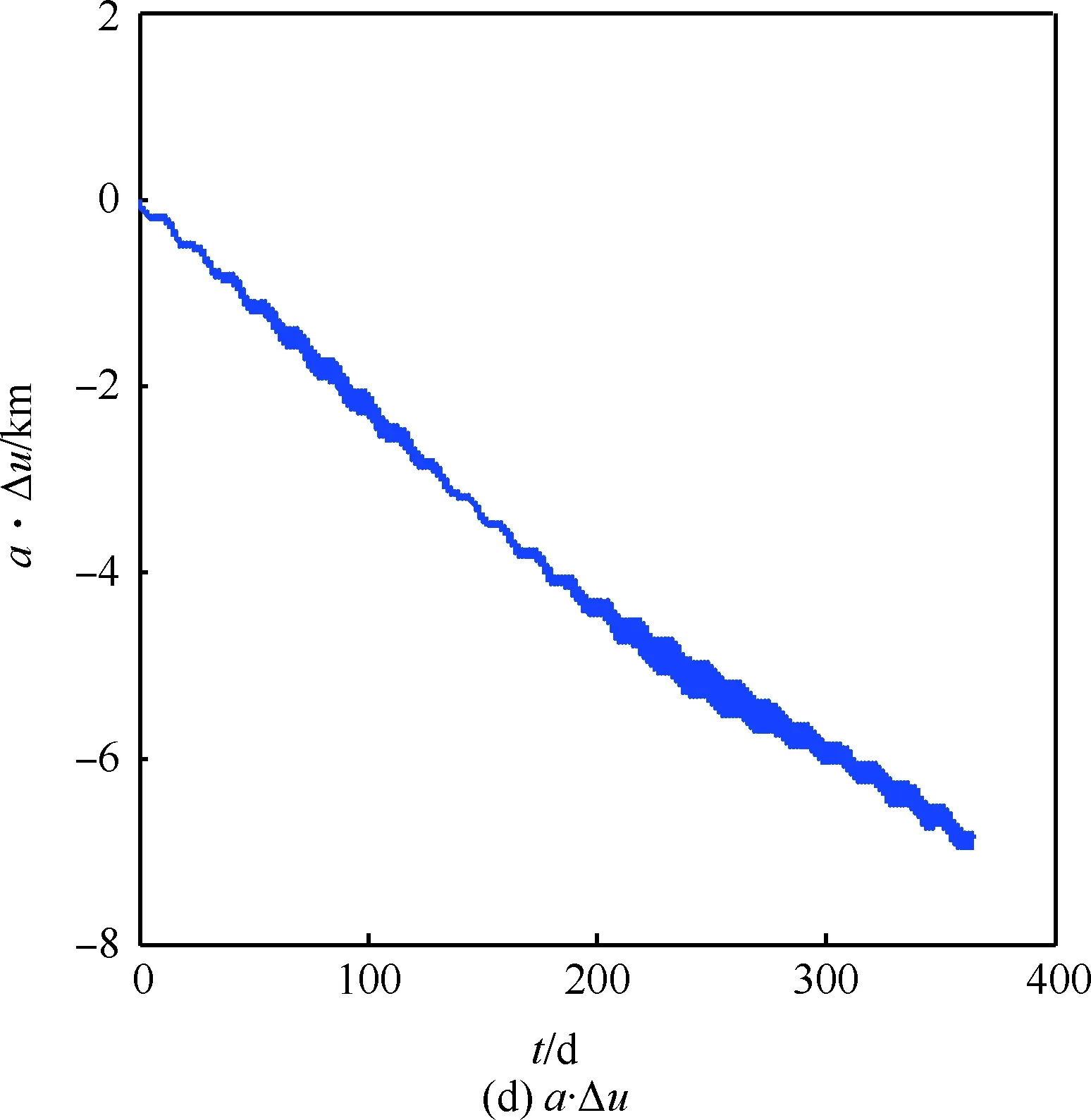
圖8 衛星受太陽光壓、固體潮和相對論效應攝動影響偏離參考軌道的情況Fig.8 Deviation of satellite’s orbit relative to reference orbit due to sunray pressure, solid tide and relativistic effect


圖9 衛星軌跡受太陽光壓、固體潮和相對論效應攝動影響在OIRINI與OERENE平面上的投影(365天)Fig.9 Projection of satellite’s track in OIRINI plane and OERENE plane due to sunray pressure, solid tide and relativistic effect (365 days)
表2 空間攝動對衛星軌道相對參考軌跡的影響匯總Table 2 Summery of deviation of satellite’s orbit relative to reference track under space perturbations

PerturbationsRelative orbit elements effectsTube errorCharacteristicsAtmosphere dragΔaaccumulated by time, max:-15 m/day;Δu accumulated by time andΔa, Δu increase faster as Δa growsMax: 600m in 3 daysAccumulated quickly, periodi-cally maintenance control nee-dedThree body gravityΔi,ΔΩ change periodically and constantly; a·Δi: 300 m, with short-term range 150 m, long-term range 100 m; a·ΔΩ:2 800 mMax: 2 300 m/aOnly the constantly change nee-ded control when it exceed the range demandsSun light pressure, Solid tide, Relativity effectΔaaccumulated by time, very small;Δu accumulated slow-ly;Δi,ΔΩ change periodically;a·Δi:about 50 m;a·ΔΩ:about 500 mMax: 750 m/aVery small,could be controlled when the front two perturba-tions is corrected
(5)
式中:a為參考軌跡對應的軌道半長軸;ωe為地球自轉角速度;n為參考軌跡對應的軌道角速度;u為衛星緯度輻角。
軌道根數控制殘差和受攝運動累積造成衛星軌道與嚴格回歸軌道的軌道傾角差Δi,升交點赤經差ΔΩ,也會造成EN的增加。其影響關系可以參照編隊衛星相對運動的關系來進行分析,影響大小可以表示為[18]
EN2(u)=a(Δisinu-ΔΩsinicosu)
(6)
式中:i為嚴格回歸軌道的軌道傾角,其他參數定義同前。
徑向偏差分量ER的影響因素包括實際衛星軌道與參考軌道半長軸偏差Δa以及衛星偏心率矢量受攝運動與嚴格回歸軌道偏心率矢量的差異引起[18]。
ER(u)=-Δexcosu-Δeysinu
(7)
(8)
式中:e為參考軌跡對應的軌道偏心率;ω為參考軌跡對應的近地點輻角;es為實際衛星的軌道偏心率;ωs為實際衛星的近地點輻角。
由于衛星實際軌道具備準凍結特性,對主要攝動源的考慮與參考軌跡設計考慮地球非球形影響比較一致,偏心率矢量演化是相對緩慢的。因此,引起管道半徑超出設定的管道邊界閾值的因素主要為管徑法向分量EN的變化。
3.2 嚴格回歸特性保持策略設計
根據以上運動學分析,由Δu造成的衛星軌道偏離參考軌跡狀態在不同的緯度帶上的影響不同,在地球兩極附近影響最小,地球赤道附近影響最大。平面外軌道根數偏差造成的偏離參考軌跡狀態在低緯度主要由ΔΩ決定,在高緯度主要有Δi決定。因此,通過合理偏置衛星軌道的緯度輻角ΔuP,就能夠能夠抵消ΔΩ偏差造成的偏離參考軌跡狀態。
考慮控制殘差以及大氣阻力、日月三體引力等攝動影響,從節省燃料消耗以及盡量減少控制頻次需求出發,管道控制保持方案采用“逐次超調+ 閾值觸發”相結合的控制方式。
1) 超調與偏置
綜合以上分析,為了抵消大氣阻力對衛星軌道半長軸衰減的影響,應采用半長軸超調控制策略,這樣可以盡可能利用自然攝動,減少軌道保持控制頻次。但是半長軸超調量的確定還需要考慮到緯度輻角u的偏置需求。通過將u偏置到uP,能夠在低緯度地區抵消升交點赤經偏差造成的管徑偏差。取衛星偏離嚴格回歸軌道中心的偏差包括法向分量邊界值為ENmax,則由式(5)和式(6)可得緯度輻角的偏置量ΔuP可以表示為
(9)
式中:第1項為抵消升交點赤經偏差影響的偏置量;第2項為考慮最大管徑偏差之后還能夠利用半長軸衰減可以使用偏置量。
由于衛星實際半長軸相對于參考軌跡會不斷降低,因此為了減小控制頻次,在軌只進行半長軸正偏置。取當前實際緯度輻角偏差為Δu
若Δu-ΔuP>0,則半長軸超調量ΔaP應采用式(10)計算:
(10)
否則,可以利用軌道參數自然衰減,實現偏離參考軌跡中心偏差的減小,不需要進行主動保持控制。
衛星實際在軌運行期間,半長軸偏置量由實際半長軸衰減速率、緯度輻角的可用偏置量、以及平面外參數軌道參數控制殘差與攝動變化等因素綜合考慮后得到。
此外,由偏心率矢量攝動造成的偏離參考軌跡偏差相對于軌道高度變化引起的偏差為一個小量,通過式(5)可以確定出偏心率Δe的控制量。在對半長軸修正控制過程中,選擇合適的控制點達到半長軸和偏心率聯合修正的目的。
2) 閾值觸發
由于控制殘差的存在以及日、月引力的影響,衛星的軌道傾角i在一段時間存在單向變化規律以及極限邊界,需要進行修正控制。由相對運動分析,Δi的單向變化逐漸壓縮逐次進行半長軸超調與緯度輻角偏置的作用范圍,削弱逐次超調與偏置的管道保持控制效果。
當Δi超出特定閾值時,必須進行平面外觸發控制。將軌道傾角的偏差閾值設定為大于250 m的參數值,就能夠達到忽略周期波動項,僅通過逐次超調控制,保證衛星運行軌跡不超出管徑偏差的要求。
ΔΩ的受攝運動引起的管徑偏差變化范圍約為Δi影響的10倍,但是經過前面的運動學分析,可以通過緯度輻角u的偏置來抵消,因此不需要主動控制。
4 數值試驗
取參考衛星軌道高度約為743 km,大氣阻力引起衛星軌道半長軸每天衰減約15 m。參考軌跡僅用70階地球重力場模型進行遞推仿真,時間衛星起始時刻與參考軌跡起始點狀態一致,遞推仿真除考慮階地球重力場之外,還包括了大氣阻力,日月三體引力,太陽光壓,固體潮,相對論效應等攝動力影響。
控制策略采用脈沖軌道半長軸和相位偏置控制方式,根據偏離參考軌跡的狀態,采用超差觸發方式,觸發控制策略的邊界設置為450 m,軌道傾角誤差的啟控邊界設置為400 m。仿真時間為1年, 在保持控制情況下,衛星相對軌道根數偏差、相對參考軌跡的管徑偏差分布情況、投影曲線及統計結果如圖10~圖13所示。
根據嚴格回歸軌道保持控制的仿真結果,1年 之內,共進行了72次嚴格回歸軌道保持控制,其中軌道平面內保持控制為70次,軌道平面外保持為2次,平均約5天進行一次保持控制,需要的總速度增量為3.88 m/s。通過保持控制,衛星在全部時間內,處于參考軌跡為中心偏差500 m 范圍內的概率優于98.95%,而且經過軌道相位偏置能夠避免對衛星升交點赤經偏差的修正控制,極大的節省了衛星所需的推進劑消耗(如果修正ΔΩ,所需增加的控制速度增量將約為當前策略速度增量的5倍)。
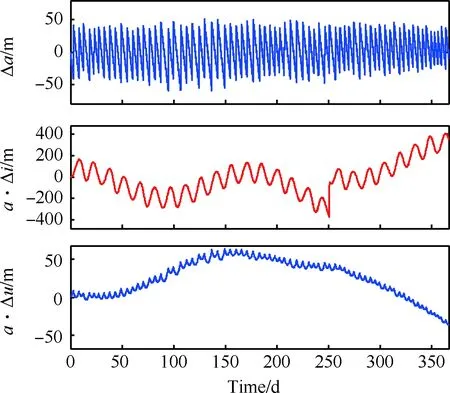
圖10 相對軌道根數變化(366天)Fig.10 Variation of relative orbit elements (366 days)


圖11 衛星管徑偏差分布Fig.11 Distribution of satellite tube radius error

圖12 衛星管徑偏差在OENERE平面上的投影(366天)Fig.12 Projection of satellite tube radius error in OENERE plane (366 days)

圖13 衛星滿足管道控制范圍統計Fig.13 Statistic of satellite meeting requirements of tube control
5 結 論
1) 本文描述了基于地固坐標系參考軌跡的衛星嚴格回歸保持軌道控制所涉及的動力學與運動學分析,以及據此設計的管道保持控制問題的一種解決方法。
2) 管道保持控制通過半長軸超調和相位偏置的設計思想,一方面盡可能利用自然攝動減少對衛星軌道的修正次數,另一方面避免了對衛星升交點赤經的頻繁修正控制,能夠有效減少對星載推擠劑的消耗。
3) 對于長期累積的傾角攝動,設計了閾值觸發控制方式,避免了該項周期性波動可能造成的頻繁控制。
4) 長時間仿真結果表明,該方法能夠確保衛星運行在設定的參考軌跡偏差管道內。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
知識經濟·中國直銷(2016年3期)2016-02-27 16:15:49
現代檢驗醫學雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學低年級版)(2011年3期)2011-01-01 00:00:00